运动控制器的硬件与软件设计
- 格式:pptx
- 大小:647.60 KB
- 文档页数:39
运动控制系统的课程设计一、课程目标知识目标:1. 学生能理解运动控制系统的基本概念、组成和分类。
2. 学生能掌握运动控制系统中常见传感器的原理和应用。
3. 学生能描述运动控制系统的执行机构工作原理及其特点。
4. 学生了解运动控制算法的基本原理,如PID控制、模糊控制等。
技能目标:1. 学生具备运用所学知识分析和解决实际运动控制问题的能力。
2. 学生能设计简单的运动控制系统,并进行仿真实验。
3. 学生能熟练使用相关软件和工具进行运动控制系统的调试与优化。
情感态度价值观目标:1. 学生培养对运动控制系统相关技术的兴趣,激发学习热情。
2. 学生养成合作、探究的学习习惯,培养团队协作精神。
3. 学生认识到运动控制系统在工程实际中的应用价值,增强社会责任感。
课程性质:本课程为电子信息工程及相关专业高年级学生的专业课程,旨在帮助学生掌握运动控制系统的基本原理、设计方法和实际应用。
学生特点:学生已具备一定的电子、电气和控制系统基础,具有较强的学习能力和实践操作能力。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,强调学生的动手能力和创新能力培养。
通过本课程的学习,使学生具备运动控制系统设计、调试和应用的能力。
教学过程中,关注学生的个体差异,因材施教,确保课程目标的实现。
二、教学内容1. 运动控制系统概述- 运动控制系统的基本概念、组成和分类- 运动控制系统的发展及应用领域2. 运动控制系统传感器- 常见运动控制传感器的工作原理、特性及应用- 传感器的选型及接口技术3. 执行机构- 电动伺服电机、步进电机、液压气动执行机构的工作原理及特点- 执行机构的控制策略及性能分析4. 运动控制算法- PID控制算法原理及其在运动控制中的应用- 模糊控制、神经网络等其他先进控制算法介绍5. 运动控制系统设计- 系统建模、控制器设计及仿真- 硬件在环(HIL)仿真与实验- 运动控制系统调试与优化6. 运动控制系统实例分析- 分析典型运动控制系统的设计过程及解决方案- 案例教学,培养学生的实际操作能力教学内容安排与进度:- 第1周:运动控制系统概述- 第2-3周:运动控制系统传感器- 第4-5周:执行机构- 第6-7周:运动控制算法- 第8-9周:运动控制系统设计- 第10周:运动控制系统实例分析教材章节关联:本课程教学内容与教材中第3章“运动控制系统”相关内容相衔接,涵盖第3章中的3.1-3.5节。
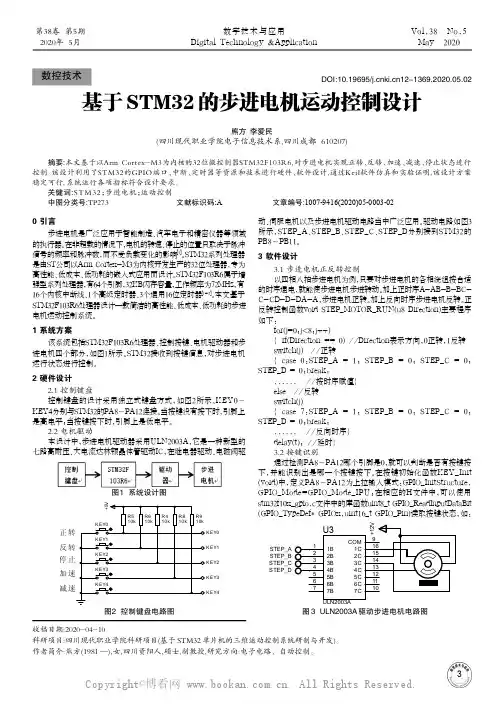
图1 系统设计图3第 38 卷 数字技术与应用 4#define KEY0 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8) //KEY0为PA8上按键的值键盘扫描函数u8 KEY_Scan(void)的程序设计思路如图4所示:3.3 中断技术STM32的每一个GPIO引脚都可以作为外部中断的中断输入口,都能配置成一个外部中断触发源。
STM32把同一个序号的引脚组成一组,每组对应一个外部中断/事件源(即中断线)EXTIx(x:0~15),将众多中断触发源分成16组。
本系统软件设计中,加速、减速、停止按键设置为中断源,即PA10、PA11、PA12引脚对应3个外部中断源,分别对应的中断线是EXTIx10~EXTIx12。
外部中断配置函数void exit_config(void)中主要代码如下:RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用时钟GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource10);//设置PA10~PA12为中断源EXTI_Init(&EXTI_InitStructure);//外部中断初始化NVIC_Init(&NVIC_InitStructure);//中断优先级初始化在中断服务函数中,中断线EXTIx15~EXTIx10共用一个外部中断通道E XT I 15_10_I R Q n,同时也共用一个中断服务函数EXTI15_10_IRQHandler()。
在中断服务函数中,判定是什么中断源。
如果是停止中断,就不再加载脉冲;如果是加速中断,则减少加载的脉冲延时;如果是减速中断,则增加脉冲延时。
3.4 延时设计STM32中有很多定时器,本文中的延时设计采用其中的滴答定时器(SysTick)。
它是一个24位的系统节拍定时器,具有自动重装载和溢出中断功能,所有基于Cortex-M3的芯片都可以由此获得一定的时间间隔[2]。
正点原子运动控制器源码概述说明以及解释1. 引言1.1 概述本文旨在对正点原子运动控制器源码进行概述说明和解释。
正点原子运动控制器是一种常用于机械控制的电路板,通过控制步进电机的运动实现对机械设备的精确定位和移动。
该源码是对该运动控制器功能实现的具体描述,提供了各种算法和驱动程序,以满足不同应用场景下的运动控制需求。
1.2 文章结构本文由以下几个部分组成:引言、正点原子运动控制器源码概述说明、正点原子运动控制器源码解释、使用案例研究和结论与展望。
通过这些部分的详细讲解,读者将能够全面了解正点原子运动控制器源码的特性及其在机械控制领域中的应用。
1.3 目的本文旨在帮助读者深入理解正点原子运动控制器源码,并为使用该源码进行开发和研究提供指导。
我们将从硬件架构和软件架构两个方面进行分析,解释其中关键算法和驱动程序的实现原理。
此外,我们还将通过使用案例研究,展示源码在实践中的应用,并对其性能进行评估和讨论。
最后,我们将总结研究内容,并展望正点原子运动控制器源码在未来的发展前景,并提出相关建议。
以上是“1. 引言”部分的内容。
2. 正点原子运动控制器源码概述说明:2.1 简介正点原子运动控制器源码是一种用于控制机械设备运动的程序代码。
它采用先进的技术和算法,实现了对机械设备的高精度、稳定和灵活控制。
该源码适用于各种领域,如工业自动化、机器人技术、智能设备等。
2.2 功能特点正点原子运动控制器源码具有以下主要功能特点:- 高性能:通过优化算法和硬件架构,实现了快速响应、高效率的运动控制。
- 多轴控制:支持多轴同时运作,可以对多个自由度进行精确的同步控制。
- 实时反馈:借助传感器和编码器等装置,实时获取设备位置和状态信息,并进行相应调整。
- 稳定性强:具备抗干扰能力,能够在复杂环境下保持稳定运行。
- 可编程性强: 提供开放接口和丰富的功能库,用户可以根据需求进行自定义编程。
2.3 开发背景正点原子运动控制器源码的开发是为了满足现代工业自动化的需求。

KeMotion r5000系列控制器是一套完整的面向多轴运动控制系统软硬件模块化控制器.硬件包括KeMotion控制器,以及各种外围模块组成,它们通过以太网或总线的形式与控制器连接,实现面向各种应用的搭配。
软件方面,有用户操作、诊断、开发工具等软件工具集。
机器人控制系统的架构可以如下图所示:系统架构一、KeMotion系统硬件结构KeMotion控制器是一套包含了完整软硬件的运动控制系统。
图1—1 KeMotion控制器结构焊接机器人所使用的几个主要的模块如下所述:CPU:数据都存在里面.系统中同时安装了RC机器人控制系统和软PLC控制系统两套软件。
它们同时运行,通过共享内存块的方式进行通信.RC部分负责运动控制,软PLC部分负责电气逻辑和实时外部信号采样处理工作,通过与RC通信,还可以扩展成为系统的主控部分,对运动控制过程进行控制.通过SERCOS III总线与控制器连接,系统采用的I/O模块是FX271/A SERCOS III 接口模块.每个单元都可以独立控制伺服,包括位置、速度、加速度和电流的控制。
Ketop示教器:太网与控制器连接通信,在局域网内有自己的IP,相当于一个独立的终端,由于是基于OS的所以可以使用路由连接,提供对TCP等协议的支持.可以通过手持终端连接至控制器控制系统的运动,作为机器人操作手持设备,可以编写终端用户程序,对机器人示教操作、手动操作,监视运动状态。
系统扩展:扩展I/O模块,由于KeMotion控制系统采用的是模块化的方式构建,所以可以方便的外扩I/O模块进行功能扩展,提供插槽式的K-BUS连接。
其中可以扩展支持各种总线(CAN、Sercos、Profibus)的模块,以及模拟量或者数字量的输入输出模块。
现在的Kemotion r5000控制系统的扩展I/O配置如下:CP252/X CPU module;DM272/A Digital Input / Output Module;DO272/A Digital Output Module;FX271/A SERCOS III Interface Module;AM280/A Analog Input/Output;PC:通过以太网和控制器连接在同一局域网内,可以登录到控制器系统内部修改终端用户程序的权限;通过编辑程序的应用程序连接正在运行的控制器,调试、仿真程序;通过PC机上编写的OPC客户端连接控制器提供的OPC服务器,读写数据,实现控制。
前言运动控制器提供丰富的接口,具有优良的运动控制性能,可以满足各种项目的扩展需求。
本手册介绍了产品的安装、接线、接口定义和操作说明等相关内容。
本手册版权归深圳市正运动技术有限公司所有,在未经本公司书面授权的情况下,任何人不得翻印、翻译和抄袭本手册中的任何内容。
前述行为均将构成对本公司手册版权之侵犯,本司将依法追究其法律责任。
涉及ECI控制器软件的详细资料以及每个指令的介绍和例程,请参阅ZBASIC软件手册。
本手册中的信息资料仅供参考。
由于改进设计和功能等原因,正运动公司保留对本资料的最终解释权!内容如有更改,恕不另行通知!调试机器要注意安全!请务必在机器中设计有效的安全保护装置,并在软件中加入出错处理程序,否则所造成的损失,正运动公司没有义务或责任对此负责。
为了保证产品安全、正常、有效的使用,请您务必在安装、使用产品前仔细阅读本产品手册。
更新记录产品型号:ECI1408网络型运动控制卡文件名版本号版本(更改)说明更新日期更改人用户手册V1.51.增加型号信息,命名规则2.增加各个端子和接口的规格接线和基本使用方法3.增加网口说明4.增加扩展模块资源映射5.增加编程软件使用方法6.增加版权声明、安全注意事项、运行与维护及售后服务说明内容2023/4/19xcx安全声明●本章对正确使用本产品所需关注的安全注意事项进行说明。
在使用本产品之前,请先阅读使用说明并正确理解安全注意事项的相关信息。
●本产品应在符合设计规格要求的环境下使用,否则可能导致设备损坏,或者人员受伤,因未遵守相关规定引发的功能异常或部件损坏等不在产品质量保证范围之内。
●因未遵守本手册的内容、违规操作产品引发的人身安全事故、财产损失等,我司将不承担任何法律责任。
安全等级定义按等级可分为“危险”、“注意”。
如果没有按要求操作,可能会导致中度伤害、轻伤及设备损伤的情况。
请妥善保管本指南以备需要时阅读,并请务必将本手册交给最终用户。
安装危险◆控制器拆卸时,系统使用的外部供应电源全部断开后再进行操作,否则可能造成设备误操作或损坏设备;◆禁止在以下场合使用:有灰尘、油烟、导电性尘埃、腐蚀性气体、可燃性气体的场所;暴露于高温、结露、风雨的场合;有振动、冲击的场合;电击、火灾、误操作也会导致产品损坏和恶化。

基于LabVIEW的运动控制系统的软件设计一、本文概述随着工业自动化的快速发展,运动控制技术在各个领域中扮演着越来越重要的角色。
作为实现精确、高效运动控制的关键环节,运动控制系统的软件设计显得尤为重要。
本文旨在探讨基于LabVIEW的运动控制系统的软件设计方法,以期为相关领域的工程技术人员提供有益的参考和借鉴。
本文将首先介绍LabVIEW软件平台及其在运动控制系统中的应用优势,包括其图形化编程环境、丰富的库函数和强大的数据处理能力等。
随后,文章将详细阐述基于LabVIEW的运动控制系统软件设计的整体架构和关键模块,包括运动控制算法的实现、硬件接口的集成、数据采集与处理等。
本文还将探讨软件设计过程中的优化策略,以提高系统的实时性、稳定性和可靠性。
二、基础知识LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国National Instruments(NI)公司开发的一种图形化编程环境,广泛应用于数据采集、仪器控制、自动化测试等领域。
LabVIEW的强大之处在于其提供了丰富的虚拟仪器(VI)和图形化编程语言G,使得工程师和科学家能够通过直观的图形化编程来实现复杂的数据和信号处理任务。
运动控制系统是指利用计算机技术和自动控制理论,对机械运动部件的位置、速度、加速度等参数进行精确控制的系统。
在LabVIEW 中,通过集成的运动控制模块和驱动器,可以实现对步进电机、伺服电机等执行机构的精确控制。
理解运动控制的基本原理,如PID控制、前馈控制、反馈控制等,对于设计高效的运动控制系统至关重要。
数据采集是运动控制系统中的关键环节,它涉及到从传感器获取数据并将其转换为计算机可以处理的数字信号。
LabVIEW提供了强大的数据采集功能,用户可以通过各种硬件接口(如DAQ卡、USB、以太网等)连接传感器,并利用LabVIEW内置的函数和控件进行数据的采集、分析和处理。
4结语在大数据时代,信息安全要求不断提高,网络规模飞速扩展,使安全事件的监控和分析变得尤为重要。
本文通过构建安全防护日志管理系统,增强了安全监控的实时性,提升了网络安全感知能力。
未来还将收集应用系统、服务器日志等信息,通过更多维度的关联分析,结合科学算法,进一步完善分析手段和风险预警能力,为保障运营商网络信息安全提供支持。
[参考文献][1]饶琛琳.ELK Stack 权威指南[M].2版.北京:机械工业出版社,2017.[2]段娟.基于Web 应用的安全日志审计系统研究与设计[J].信息网络安全,2014(10):70-76.[3]冯立.基于粗糙集理论的安全日志分析模型[J].计算机工程,2002,28(11):164-166,182.[4]李晨光.UNIX/Linux 网络日志分析与流量监控[M].北京:机械工业出版社,2014.[5]杨秋翔.基于时间序列的多源日志安全数据挖掘仿真[J].计算机仿真,2019,36(2):297-301.收稿日期:2019-09-29作者简介:张延盛(1986—),男,江苏南京人,硕士研究生,工程师,研究方向:数据库与信息系统。
基于S7-1200PLC 的伺服电机运动控制系统设计李虹静(华中科技大学工程实训中心,湖北武汉430074)摘要:S7-1200作为西门子公司一款紧凑型PLC ,具有稳定性好、可靠性强的特点,同时还具备强大的运动控制功能。
现首先介绍了伺服电机运动控制系统的设计要求,然后针对台达B2系列伺服器工作特性,从台达B2系列伺服驱动器与西门子S7-1200PLC 的硬件设计入手,阐述了B2系列伺服驱动器参数调节的原理和步骤,最后通过在TIA 博途V15软件中对运动轴进行组态和编程,并利用S7-1200PLC 的PTO 功能实现了精准的运动控制。
关键词:S7-1200PLC ;伺服电机;运动控制;PTO1伺服电机运动控制系统概述1.1运动控制模型本伺服电机运动控制系统采用如图1所示的运动控制模型搭建,其中伺服电机由台达B2系列伺服器驱动,通过调节伺服驱动器参数以及编写PLC 程序,可实现包括距离控制、旋转角度控制、定位控制、路径控制以及闭环控制在内的多种运动控制实验[1]。
PMAC多轴运动控制器研究随着工业自动化的快速发展,多轴运动控制器在各种工业应用中的重要性日益凸显。
在这种背景下,PMAC(Programmable Multi-Axis Controller)多轴运动控制器作为一种先进的控制解决方案,引起了广泛。
本文将详细介绍PMAC多轴运动控制器的原理、设计及其实验结果,并探讨其未来研究方向和应用前景。
多轴运动控制器是指能够同时控制多个轴运动的控制器。
在工业自动化领域,多轴运动控制器广泛应用于机器人、数控机床、印刷机等设备。
PMAC多轴运动控制器作为一种可编程控制器,具有高度的灵活性和通用性。
它允许多个轴的运动控制相互独立,同时又协调一致,以实现复杂的运动轨迹和精确的位置控制。
PMAC多轴运动控制器采用基于PC的开放式体系结构,通过高速光纤总线实现与PC的高速数据传输。
控制器硬件由多个轴控制器模块和I/O模块组成,每个轴控制器模块可独立控制一个轴,I/O模块则用于输入输出信号的处理。
PMAC多轴运动控制器的核心是运动控制算法。
算法采用基于矢量控制的方法,通过实时计算速度和位置误差,实现对电机的精确控制。
PMAC还支持多种编程语言,如C++、和Python,方便用户根据具体应用进行软件开发。
为了验证PMAC多轴运动控制器的性能,我们进行了一系列实验。
在实验中,我们将PMAC控制器应用于一台五轴数控机床,通过控制五个电机的运动,实现了对工件的精确切割。
实验结果表明,PMAC控制器在位置控制和速度控制方面都具有很高的精度和稳定性。
我们还对比了PMAC控制器和其他多轴运动控制器的性能。
对比结果表明,PMAC控制器在动态性能、稳态精度和抗干扰能力等方面都具有显著优势。
这主要得益于PMAC控制器的开放式体系结构、高速数据传输和先进的运动控制算法。
本文对PMAC多轴运动控制器进行了详细研究。
通过介绍PMAC控制器的原理、设计和实验结果,我们证明了PMAC作为一种先进的可编程多轴运动控制器,在工业自动化领域具有广泛的应用前景。
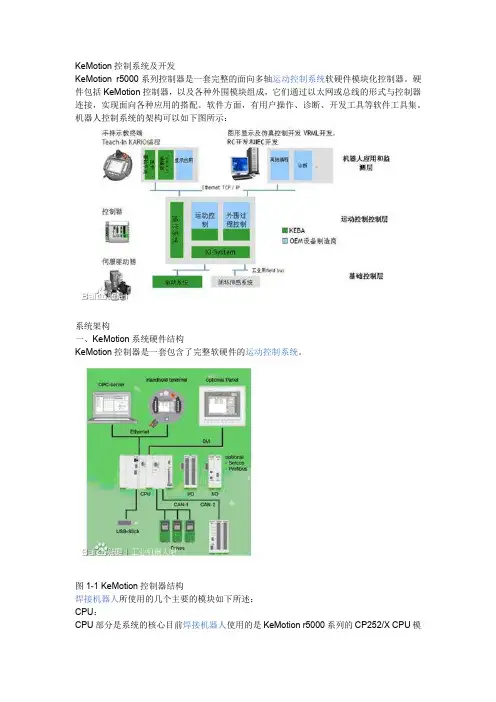
KeMotion控制系统及开发KeMotion r5000系列控制器是一套完整的面向多轴运动控制系统软硬件模块化控制器。
硬件包括KeMotion控制器,以及各种外围模块组成,它们通过以太网或总线的形式与控制器连接,实现面向各种应用的搭配。
软件方面,有用户操作、诊断、开发工具等软件工具集。
机器人控制系统的架构可以如下图所示:系统架构一、KeMotion系统硬件结构KeMotion控制器是一套包含了完整软硬件的运动控制系统。
图1-1 KeMotion控制器结构焊接机器人所使用的几个主要的模块如下所述:CPU:CPU部分是系统的核心目前焊接机器人使用的是KeMotion r5000系列的CP252/X CPU模块(使用的是定制的基于Intel x86嵌入式微处理器),其上运行的是VxWorks实时操作系统。
控制器带有CF卡,OS和应用软件以及系统的数据都存在里面。
系统中同时安装了RC 机器人控制系统和软PLC控制系统两套软件。
它们同时运行,通过共享内存块的方式进行通信。
RC部分负责运动控制,软PLC部分负责电气逻辑和实时外部信号采样处理工作,通过与RC通信,还可以扩展成为系统的主控部分,对运动控制过程进行控制。
伺服驱动器:通过SERCOS III总线与控制器连接,系统采用的I/O模块是FX271/A SERCOS III 接口模块。
每个单元都可以独立控制伺服,包括位置、速度、加速度和电流的控制。
Ketop示教器:手持终端(KeTop示教器),其上运行的是基于WinCE的嵌入式系统,通过以太网与控制器连接通信,在局域网内有自己的IP,相当于一个独立的终端,由于是基于OS的所以可以使用路由连接,提供对TCP等协议的支持。
可以通过手持终端连接至控制器控制系统的运动,作为机器人操作手持设备,可以编写终端用户程序,对机器人示教操作、手动操作,监视运动状态。
系统扩展:扩展I/O模块,由于KeMotion控制系统采用的是模块化的方式构建,所以可以方便的外扩I/O模块进行功能扩展,提供插槽式的K-BUS连接。
摘要运动控制系统主要是电动机的控制,如今电动机在人们的工业生产和生活中起着十分重要的作用,其中直流电机以其优异的性能一直具有广泛的应用,而数字化控制是运动控制系统一个重要发展趋势。
本设计为基于单片机的运动控制系统,以AT89C52单片机作为控制核心,小型直流电机作为控制对象。
硬件部分包括电源电路、矩阵键盘、L298电机驱动电路、液晶显示等;软件部分包括按键扫描、PWM波生成、转速测量、PID调节、液晶显示以及上位机设计等。
利用定时器计算出电机实时转速,将实时转速在LCD1602上显示并通过串口发送给上位机,然后将实时转速与矩阵键盘设定的转速值比较,再经过PID调节,改变PWM波的占空比,从而调节电机转速。
经过多次调试,本系统基本能够实现转速无静差,而且抗扰动性能良好。
关键词:单片机,PWM波,PID调节,直流闭环调速,上位机ABSTRACTThe motion control system is mainly designed for electric motor.Nowadays,the electric motor plays a crucial role in industrial production and people’s daily life. And DC motor is widely used for its outstanding performance. Meanwhile, digital control is an important development tendency in motion control system.This is a design of motion control system based on single chip microcomputer,which is the cybernetic core while the control object is a small DC motor. In the system,thehardware part consists of power circuit、matrix keyboard、DC motor driver used L298N、liquid crystal display etc; And the software part consists of key-scan subroutine、PWM wave subroutine、speed measurement、PID regulation、LCD subroutine and supervisor software etc. The single chip microcomputer work out the real-time speed with its inner timer. Then the real-time speed is shown on LCD1602 and is sent to supervisor software through serial port. Next,the single chip microcomputer will compare the real-time speed with the set-speed,and after the regulation of PID controller,the duty cycle of PWM wave is changed. As a result,the speed of DC motor is changed. After many times of system debugging,this system is able to eliminate steady-state error of speed and have good disturbance-resistant performance.KEY WORDS:Single Chip Microcomputer, PWM Wave, PID regulation, closed-loop DC motor speed regulation,supervisor software目录第1章绪论 (1)1.1 运动控制系统的组成 (1)1.2 运动控制系统的发展 (2)1.3 单片机在电动机控制中的优点 (3)1.4 上位机在控制工程中的作用 (4)1.5 本次设计所研究的内容和意义 (4)第2章系统总体设计 (5)2.1 系统设计及功能 (5)2.2 调速方案选择 (5)2.3 调压方案选择 (6)2.4 控制回路选择 (7)2.5 上位机界面设计选择 (9)第3章硬件设计 (11)3.1 电源模块 (11)3.2 控制芯片选择 (12)3.3 电机及驱动模块 (13)3.4 转速及电流检测 (14)3.5 键盘及显示模块 (15)3.6 本章小结 (16)第4章软件设计 (17)4.1 系统主程序设计 (17)4.2 数字PID控制算法 (17)4.3 矩阵键盘设计 (18)4.4 中断处理程序 (19)4.4.1 PWM波生成程序 (19)4.4.2 重设参数程序 (20)4.5 转速测量及数字滤波 (21)4.5.1 转速测量 (21)4.5.2 数字滤波 (22)4.6 上位机程序设计 (22)4.7 本章小结 (24)第5章硬件调试 (25)5.1 硬件电路调试 (25)5.2 软件调试 (25)5.3 系统联合调试 (28)5.4 本章小结 (29)第6章结论与展望 (30)6.1 系统设计成果 (30)6.2 经验收获 (30)6.3 展望 (30)致谢 (31)参考文献 (32)附录 (33)第1章绪论电动机能够实现电能与机械能之间的转换,根据电动机的数学模型可知,电机的输入量包括电压、电流、频率等,输出量包括转速、力矩、位移等,而运动控制系统的任务是通过控制电机的输入量来改变电机的输出量,使之满足人们的工业生产和其它方面的需求。
基于AVR单片机的智能跑步机控制器设计————————————————————————————————作者:————————————————————————————————日期:基于AVR单片机的智能跑步机控制器设计1 引言电动跑步机是目前健身器材中的主流产品,它是通过电机带动跑步带使人以不同的速度被动地跑或走,在人体用力方面,比在地面上跑、走省去了一个蹬伸动作,可使人比在地面运动消耗更多能量。
但由于其功能比较单一,缺乏娱乐性和交互性,长时间锻炼会使人感到枯燥乏味。
在全社会崇尚健身就是生活质量的今天,传统电动跑步机这种单调重复运动已难以满足人们对健身品质的要求,而具有虚拟现实功能的智能跑步机,以计算机虚拟的模拟环境代替现实世界的真实环境,给人身临其境的沉浸感,增加了健身的乐趣,已成为目前的研究热点.本文将传统电动跑步机与虚拟现实技术相结合,研究并设计了具备传统电动跑步机各种健身模式且具有虚拟场景漫游功能的智能电动跑步机控制系统.系统通过上下位机的串行通信进行各种参数的实时传递,TFT液晶显示器显示友好的操作界面以及实时变化的运动和体能参数,采用触摸屏与薄膜按键结合的操作方式增加操作的灵活性,是虚拟现实、人机交互在健身器材方面应用的一个典型例子。
采用ATMEL公司的ATmega128作为跑步机的主控芯片,它具有先进的RISC架构,内部集成较大容量存储器,有丰富的管脚资源,驱动能力强,具有在系统编程功能,给控制系统的设计及程序的升级和维护提供了极大方便。
2 跑步机控制系统的结构及功能2。
1 系统结构控制系统由上位机和下位机两大部分组成。
上位机采用普通计算机,主要负责触摸屏控制、操作界面显示、多媒体播放和虚拟场景漫游.下位机以ATmega128为核心控制器,配合相应的外围电路,通过采集键盘输入、电机反馈、接收上位机信息等对跑步机进行直接控制。
上下位机通过串行通信总线RS232进行通信。
跑步机控制系统总体设计框图如图1所示,虚线框内是下位机控制器设计。
基于DSP与FPGA的运动控制器设计
运动控制技术是数控机床的关键技术,其技术水平的高低将直接影响一个国家装备制造业的发展水平。
目前,多轴伺服控制器越来越多地运用在运动控制系统中,具有较高的集成度和灵活性,可实时完成运动控制过程中复杂的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。
本文选用DSP与FPGA作为运动控制器的核心部件,设计了通用型运动控制器。
其中DSP用于运动轨迹规划、速度控制及位置控制等功能;FPGA完成运动控制器的精插补功能,用于精确计算步进电机或伺服驱动元件的控制脉冲,同时接收并处理脉冲型位置反馈信号。
本文对该运动控制器的总体结构、硬件设计和软件设计进行了描述。
1 系统总体设计
运动控制器的总体性能指标为:作为一个单独的运动控制器使用,控制信号采用数字量方式输出,能控制四轴的伺服电机;最高脉冲输出频率为
4MP/s,能处理的编码器反馈信号最高频率为4MP/s;能接收和处理4路编码器反馈信号;可以处理原点信号、正负方向信号、到位信号以及急停信号等数字量输入信号;提供16路数字量输出信号和16路数字量输入信号接口。
运动控制器采用DSP与FPGA芯片作为主控芯片,主要包括DSP模块、FPGA模块、FPGA外围电路模块和数字量输入输出接口模块。
采用基于DSP与FPGA的运动控制器,能够实时完成复杂的轨迹运算,而且利用DSP的高速数字信号处理功能和FPGA功耗低、主频高的优点,能充分显示该运动控制器的优点。
采用DSP与FPGA相结合的运动控制器可以方便地对系统的控制策略进行修改,对控制参数进行修正,并可使设备具有良好的可靠性、可维修性,而且还降低了成本。
系统还可以采用更多的智能控。
实验一异步电机矢量变换控制原理实验一、实验目的:1.了解异步电机转子磁场定向控制的原理结构框图及硬件构成2.了解异步电机转子磁场位置检测电流模型法3.了解异步电动机转子磁场定向控制原理中实现矢量变换的方法及意义二、实验设备三、实验线路及原理1.运动控制系统的硬件配置图1-1 运动控制系统硬件构成图1-1为本系统的硬件配置框图。
THKDSP-1为运动控制实验箱,箱内装有DSP主控板(B1),功率驱动板(B2)及控制电源和功率模块板(B3)。
图1-2为DSP主控板的组成框图。
它包括DSP芯片;RAM芯片IC1、IC2;E2PROM存储器芯片IC3;用于RS232串行通信的接口芯片IC4以及MC-BUS I/O连接器J1、J2。
图1-2 DSP主控板组成框图图1-3为功率驱动板框图。
它包括电动机两相电流I a,I b(Iu、Iv)检测;直流母线电压V dc检测电路;保护电路;PWM信号驱动电路。
图1-3 功率驱动板电路结构框图电源功率模块板包括﹢5V,±15V, +15V三组电源和由六个IGBT构成的逆变电路。
2.异步电动机转子磁场定向控制的原理图1-4 转子磁场定向控制原理框图电机的相电流i a,i b检测之后,经过3/2变换(Park变换)和旋转变换后得到旋转变换坐标上的二个分量i sd,i sq,这两个分量分别与磁通参考值i sdref和转矩参考值i sqref比较之后送入电流和磁通调节器PI。
电流调节器的输出即为在旋转坐标上的电压分量参考值U dref和U qref;此二分量经旋转逆变换和3/2变换(Park变换)之后得到定子三相电压的参考值U aref,U bref,U cref。
根据U aref,U bref,U cref产生三相逆变器的PWM驱动信号。
转子磁通的位置角θ则由电机的模型和电机速度反馈信号计算而得。
四、实验内容1.熟悉运动控制的系统硬件构成2.异步电机转子磁场定向控制(FOC)得输入信号测量,i a、i b和转子磁场位置角计算3.电流信号的3/2变换(Park变换)及旋转变换4.i sd,i sq波形观察,并与i sdref,i sqref作比较五、预习要求1.仔细阅读FOC控制原理的有关章节2.3/2变换(Park变换)与旋转变换的计算公式3.画出异步电机的电流模型框图及有关θ计算公式4.画出电压、电流和转子磁通的空间向量及旋转坐标的d-q轴,静止坐标a-b-c、和α-β。