汽车线控技术系列1----汽车线控技术简介
- 格式:pptx
- 大小:696.74 KB
- 文档页数:16
◆文/江苏 高惠民线控转向系统技术综述与实车应用(一)一、概述汽车线控技术(X-by-wire)起源于飞机的电传操纵系统,飞行员不再通过传统的机械回路或液压回路来控制飞机的飞行姿态,而是通过安装在操纵杆处的传感器检测飞行员施加在其上的力和位移,并将其转换为电信号,在电控单元中将信号进行处理,然后传递到执行机构,从而实现对飞机的控制。
随着线控技术的发展,这一技术逐渐应用到汽车。
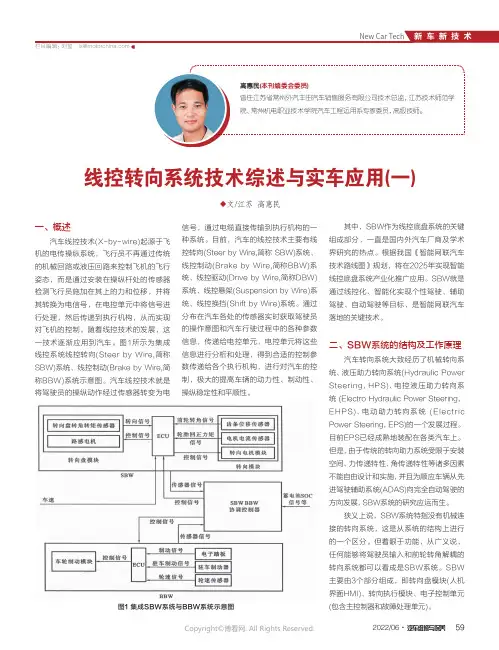
图1所示为集成线控系统线控转向(Steer by Wire,简称 SBW)系统、线控制动(Brake by Wire,简称BBW)系统示意图。
汽车线控技术就是将驾驶员的操纵动作经过传感器转变为电信号,通过电缆直接传输到执行机构的一种系统。
目前,汽车的线控技术主要有线控转向(Steer by Wire,简称 SBW)系统、线控制动(Brake by Wire,简称BBW)系统、线控驱动(Drive by Wire,简称DBW)系统、线控悬架(Suspension by Wire)系统、线控换挡(Shift by Wire)系统。
通过分布在汽车各处的传感器实时获取驾驶员的操作意图和汽车行驶过程中的各种参数信息,传递给电控单元,电控单元将这些信息进行分析和处理,得到合适的控制参数传递给各个执行机构,进行对汽车的控制,极大的提高车辆的动力性、制动性、操纵稳定性和平顺性。
其中,SBW作为线控底盘系统的关键组成部分,一直是国内外汽车厂商及学术界研究的热点。
根据我国《智能网联汽车技术路线图》规划,将在2025年实现智能线控底盘系统产业化推广应用。
SBW就是通过线控化、智能化实现个性驾驶、辅助驾驶、自动驾驶等目标,是智能网联汽车落地的关键技术。
二、SBW系统的结构及工作原理汽车转向系统大致经历了机械转向系统、液压助力转向系统(Hydraulic Power Steering,HPS)、电控液压助力转向系统 (Electro Hydraulic Power Steering,EH PS)、电动助力转向系统 (El ectr ic Power Steering,EPS)的一个发展过程。
SBW的英文全称是Steering By Wire。
中文意思是“线控转向系统”。
该系统去掉了转向盘和转向轮之间的机械连接,减轻了大约5kg重量,消除了路面的冲击,具有降低噪声和隔振等优点。
目前国外著名汽车公司和汽车零部件厂家竞相研究具有智能化的新一代转向系统,如美国Delphi公司、TRW公司、日木三菱公司、Koyo公司、德国Bosch 公司、ZF公司、BMW公司等都相继在研制各自的SBW系统,国内也开始涉足这一相关研究领域。
SBW系统由方向盘模块、转向执行模块和ECU3个主要部分以及自动防故障系统、电源等辅助模块组成。
方向盘模块包括方向盘、方向盘转角、力矩传感器、方向盘回正力矩电机。
方向盘模块的主要功能是将驾驶员的转向意图(通过测量方向盘转角)转换成数字信号并传递给主控制器;同时接受ECU送来的力矩信号,产生方向盘回正力矩以提供给驾驶员相应的路感信号。
转向执行模块包括前轮转角传感器、转向执行电机、转向电机控制器和前轮转向组件等。
转向执行模块的功能是接受ECU的命令,控制转向电机实现要求的前轮转角,完成驾驶员的转向意图。
ECU对采集的信号进行分析处理,判别汽车的运动状态,向方向盘回正力电机和转向电机发送命令,控制两个电机的工作。
自动防故障系统是线控转向系的重要模块,它包括一系列监控和实施算法,针对不同的故障形式和等级作出相应处理,以求最大限度地保持汽车的正常行驶。
汽车的安全性是必须首先考虑的因素,是一切研究的基础,因而故障的自动检测和自动处理是线控转向系统最重要的组成系统之一。
SBW的工作原理是当转向盘转动时,转向传感器和转向角传感器将测量到的驾驶员转矩和转向盘的转角转变成电信号输入到ECU,ECU依据车速传感器和安装在转向传动机构上的位移传感器的信号来控制转矩反馈电动机的旋转方向,并根据转向力模拟,生成反馈转矩,控制转向电动机的旋转方向、转矩大小和旋转角度,通过机械转向装置控制转向轮的转向位置,使汽车沿着驾驶员期望的轨迹行驶。
汽车线控制动技术的发展简介展摘要:线控制动系统是未来汽车制动系统发展的方向,相比于传统制动系统,它具有制动响应速度快、制动性能高和制动系统结构简化等优点。
本文介绍了汽车线控制动技术的研究现状,对电子液压制动系统和电子机械制动系统的工作原理及特点进行了介绍和比较,论述了线控制动系统的关键技术和发展趋势。
关键词:线控制动系统;电子液压制动;电子机械制动Abstract:The wire braking system is the future direction of the development of automotive braking systems, compared to traditional braking system, it has a brake fast response, high braking performance, and simplify the structure of the brake system, etc. This article describes the e-wire braking technology of vehicle status, the electronic hydraulic brake system and electronic mechanical braking system works and features are introduced and compared, wire braking system discussed key technologies and trends.Keywords: by-wire brake system; electronic hydraulic brake; electro-mechanical brake1线控制动系统的概述1.1制动系统的发展状况随着消费者对车辆安全性日益提高的重视,车辆制动系统也历经了数次变迁和改进。

汽车线控技术的原理与应用1. 汽车线控技术简介汽车线控技术是一种通过电子信号传输方式,实现对汽车各种功能的远程控制。
通过线控技术,可以方便地操控汽车的各项功能,提高驾驶的便利性和安全性。
本文将介绍汽车线控技术的原理以及其在汽车行业中的应用。
2. 汽车线控技术的原理汽车线控技术的原理可以分为以下几个方面:2.1 电子信号传输汽车线控技术通过电子信号传输实现对汽车功能的控制。
通过设备发送特定的电子信号,将指令传输到汽车的控制模块,从而实现对汽车功能的操控。
传输的电子信号可以通过有线连接或者无线连接来实现。
2.2 控制模块汽车线控技术需要汽车内部安装相应的控制模块,用于接收并解析传输的电子信号。
控制模块根据接收到的信号,对汽车的各项功能进行控制。
控制模块一般与汽车的中央控制系统相连,通过与中央控制系统的通信,实现对汽车各项功能的控制。
2.3 安全性与可靠性在汽车线控技术的设计中,安全性和可靠性是非常重要的考虑因素。
汽车线控技术必须确保控制信号的传输不被干扰,并且传输过程中不会出现误操作。
因此,在设计控制信号传输协议时,需要考虑到数据的加密和校验,以及异常情况的处理机制,从而保证汽车线控技术的安全性和可靠性。
3. 汽车线控技术的应用汽车线控技术在汽车行业中有着广泛的应用。
下面列举了几个常见的应用场景:3.1 远程启动通过汽车线控技术,驾驶员可以通过遥控器或者手机App等设备,远程控制汽车的启动。
这对于冬季寒冷天气中预热汽车或夏季炎热天气中通风车内空气来说非常实用。
3.2 门锁解锁利用汽车线控技术,驾驶员能够通过遥控器或者手机App对汽车的门锁进行远程控制。
这使得驾驶员可以在离开汽车后,随时随地锁定或解锁车门,提高了汽车的安全性。
3.3 车灯控制通过汽车线控技术,驾驶员可以远程控制汽车的大灯、示宽灯、雾灯等灯光装置。
这对于在夜间找到自己的车辆或者提醒其他驾驶员注意自己的存在非常有帮助。
3.4 空调控制利用汽车线控技术,驾驶员可以通过遥控器或者手机App对汽车的空调系统进行远程控制。


汽车线控驱动系统的工作原理
汽车线控驱动系统是一种新型的汽车驱动技术,它通过电子控制系统来实现对车辆动力的精确控制。
下面是汽车线控驱动系统的工作原理:
1. 传感器监测:车辆上的各种传感器,如车速传感器、油门踏板传感器、转向角传感器等,实时监测车辆的状态和驾驶员的操作。
2. 电子控制单元(ECU):ECU 是汽车线控驱动系统的核心部件,它接收来自传感器的信号,并根据预设的控制策略进行处理和计算,生成相应的控制指令。
3. 执行器:根据 ECU 发出的指令,执行器(如电机、电磁阀等)将电能转化为机械能,实现对车辆动力的精确控制。
例如,在油门控制中,ECU 会根据驾驶员的油门踏板操作和车辆的行驶状态,计算出合适的油门开度,并通过电机或电磁阀来控制油门的开合程度,从而实现对发动机输出功率的精确控制。
4. 通信网络:汽车线控驱动系统中的各个部件之间通过通信网络(如 CAN 总线)进行数据传输和交互,以确保整个系统的协调工作。
5. 驾驶员控制:驾驶员通过操作油门踏板、刹车踏板、方向盘等部件,向汽车线控驱动系统发送操作指令。
通过汽车线控驱动系统,驾驶员可以更加精确地控制车辆的动力输出,提高了驾驶的舒适性和安全性。
同时,线控驱动系统还可以实现更加高效的能源利用,降低排放,为环保做出贡献。
XX学院实验指导书课程编号:课程名称:《汽车线控技术》实验学时: 2 适用专业:车辆工程专业制定人:制(修)订时间: 2019年7月专业负责人审核:专业建设工作组审核:2019年 7月实验纪律要求1.明确实习目的、端正态度、严格遵守校纪校规。
2.努力完成各项实习任务。
3.服从指导老师和实验室管理人员安排。
4.不迟到、不早退。
5.实习期间不穿拖鞋,做好自我身体安全保护,女生长发要扎起。
6.不做危险有害他人身体健康的事情。
7. 学生在实习场地内未经许可不准随意搬动机件和乱按电器开关,损坏自赔,严格遵守有关的规章制度。
第一部分实验大纲一、教学目的与基本要求《汽车线控技术》是车辆工程本科专业一门主要的专业选修课。
因其较强的理论性、应用性及实践性,故应充分重视实验教学。
要求学生在实验中发现问题,解决问题,加深对理论知识的理解和应用。
目的使学生了解典型的线控系统,了解其结构组成,掌握其控制原理。
二、实验内容和学时分配三、实验成绩评定、考核办法1.实验报告(1)每个学生按照实验课内容自己总结实验的结果及实验中遇到问题的处理办法;(2)按照规定的时间,上交实验报告。
2.考核方式(1)实验课成绩按照提交的实验报告内容给出,不再进行单独的考核评定。
(2)实验课成绩按照一定的百分比折合到学生的平时成绩中。
四、参考资料(参考书、网络资源等)1.使用教材及实验指导书《汽车线控技术》于蕾艳主编,青岛:中国石油大学出版社.实验指导书:自编。
2. 主要参考书《汽车电器与电子技术》(第2版)孙仁云 ,付百学主编,北京:机械工业出版社,2011.7《汽车电子控制技术》(第3版)凌永成主编,北京:北京大学出版社,2017.1《汽车电子控制技术》姚方方主编,北京:北京理工大学出版社,2019.7第二部分单元实验实验(项目)一典型线控系统的认知实验一、实验目的①了解汽车线控节气门系统的组成。
②掌握汽车线控节气门系统的控制原理。
二、实验要求①认知汽车上的线控节气门系统。
浅谈汽车“线控驱动”Drive-by-wire被称为线控驱动技术,有时也被称为“线控驱动”或简单的“线控”,有可能改变人们的开车方式。
装有这种系统的汽车将主要依靠电子来控制车辆的操作,包括加速、刹车和转向。
传统汽车主要采用液压和机械技术来执行这些相同的基本操作,虽然传统系统功能强大,但也可能过于复杂,效率低下,而且易于磨损。
但是,近些年来,制造商和外部研究人员和发明家已经开始将电脑和电子产品整合到现代的汽车上。
如果司机可以非常容易地掌握这个技术,线控驱动系统具有增加舒适性、功能性和安全性的潜力。
计算机和传感器分析指令,并控制汽车执行相应的动作。
而且,线控驱动系统还有环境方面的优势,因为该技术可以改善燃料经济性并减少或改善发动机的排放。
线控驱动技术也是航空爱好者熟悉的术语,因为被称为“线控飞行系统”(fly-by-wire)的技术自20世纪90年代就已经开始在飞机上使用。
与线控驱动技术相似,“线控飞行控制”技术使用电线来控制飞机的正常运作。
线控驱动技术是如何在汽车上工作的?司机如何加速,减速和转向,换线?这种技术安全吗?线控驱动技术有隐忧吗?线控驱动技术的种类一个典型的液压、机械系统,需要大量的零件来控制汽车的方方面面的功能。
在汽车上,这个系统通过将制动助力器、主缸、转向柱、转向轴、齿条和小齿轮,液压管线和各种电缆和接头连接起来来执行功能。
这些组件协同或者独立的工作,从而给我们顺畅的驾驶体验。
然而这个系统也增加了重量,而且随着时间的推移会磨损或者老化。
而在线控驱动系统中,大部份或全部这种功能将通过电信号执行。
无论何种类型的线控系统,都是由传感器记录信息,并将数据传递到计算机或者一系列计算机上,然后,计算机通过预设的程序发出指令和信号,执行装置将电能转换成机械运动。
线控驱动系统有下面几种主要的类型:1、线控油门:线控油门,或线控加速,是线控驱动系统引入的第一种类型。
这些系统使用踏板单元和发动机管理系统。
汽车线控转向系统的结构与技术原理分析一、线控转向系统的结构及工作原理(一)线控转向系统的结构汽车线控转向系统主要由转向盘模块、前轮转向模块、主控制器(ECU)以及自动防故障系统组成。
1.转向盘模块转向盘模块包括转向盘组件、转向盘转角传感器、力矩传感器、转向盘回正力矩电机。
其主要功能是将驾驶员的转向意图(通过测量转向盘转角)转换成数字信号并传递给主控制器,同时主控制器向转向盘回正力矩电机发送控制信号,产生转向盘回正力矩,以提供给驾驶员相应的路感信息。
2.前轮转向模块前轮转向模块包括前轮转角传感器、转向执行电机、电机控制器和前轮转向组件等。
其功能是将测得的前轮转角信号反馈给主控制器,并接受主控制器的命令,控制转向盘完成所要求的前轮转角,实现驾驶员的转向意图。
3.主控制器主控制器对采集的信号进行分析处理,判别汽车的运动状态,向转向盘回正力矩电机和转向电机发送命令,控制两个电机协调工作。
主控制器还可以对驾驶员的操作指令进行识别,判定在当前状态下驾驶员的转向操作是否合理。
当汽车处于非稳定状态或驾驶员发出错误指令时,前轮线控转向系统将自动进行稳定控制或将驾驶员错误的转向操作屏蔽,以合理的方式自动驾驶车辆,使汽车尽快恢复到稳定状态。
4.自动防故障系统自动防故障系统是线控转向系统的重要模块,它包括一系列的监控和实施算法,针对不同的故障形式和故障等级做出相应的处理,以求最大限度的保持汽车的正常行驶。
线控转向技术采用严密的故障检测和处理逻辑,以最大程度地提高汽车安全性能。
(二)线控转向系统的工作原理其工作过程:来自转向盘传感器和各种车辆当前状态的信息送给电子控制子系统后,利用计算机对这些信息进行控制运算,然后对车辆转向子系统发出指令,使车辆转向。
同时车轮转向子系统中的转向阻力传感器给出的信息也经电子控制子系统,传给转向盘子系统中模拟路感的部件。
二、线控转向系统的性能特点由于线控转向系统中的转向盘和转向轮之间没有机械连接,是断开的,通过总线传输必要的信息,故该系统也称作柔性转向系统。