异。图7-15c(上)在16个方案中是最佳结构设计,但通过变元
法,仍可继续改进,如图7-15下a-e五个结构。
PPT文档演模板
机械系统创新设计89机械系统创新实 例
PPT文档演模板
图7-15
机械系统创新设计89机械系统创新实 例
第
贝谢夫定理”。该定理的内容是:由一个四杆铰链机
构发生的一条连杆曲线,还可以由另外两个四杆铰链
机构发生出来。或表述为同一连杆曲线,可以用三个
不同的机构来实现。
PPT文档演模板
机械系统创新设计89机械系统创新实 例
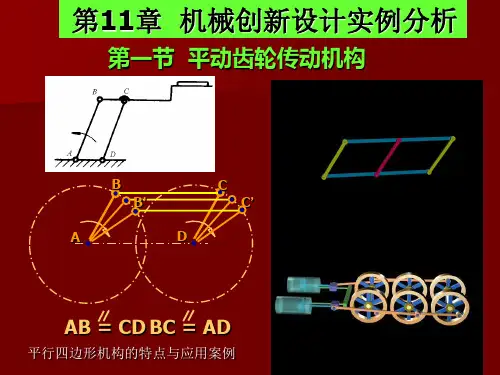
1.连杆点K位于连杆两铰链连线上的同迹连杆机构
•
图形缩放原理如下图7-2a所示为一平行四边形机构,
PPT文档演模板
机械系统创新设计89机械系统创新实 例
•2 •1 •吸气
•压缩
•燃爆
PPT文档演模板
•排气
机械系统创新设计89机械系统创新实 例
第四节 联轴器的创新设计
• 1.联轴器的分类
•
根据联轴器是否补偿两轴位移的偏移,是否具有弹性
元件,可作图7-9所示的分类。下面通过对机床行业对联
轴器的需求情况和发展趋势的分析,仅对可移式联轴器进
带和带轮间的摩擦力来传递运动和动力。带传动的优点是结
构简单、传动平稳、能缓和冲击和过载打滑,缺点是传动比
较小且不准确,且在结构上从动带轮占据的空间没有充分利
用。
• 3.活齿减速带轮的形成
•
由外激波摆动活齿传动与带传动机构的从动带轮合二为
一形成的行星减速带轮,是一种新型减速装置。它具有带传
动可靠性高、减振能力强等优点,又保持了摆动活齿传动无
PPT文档演模板