水准高程平差计算表
- 格式:xls
- 大小:26.00 KB
- 文档页数:3
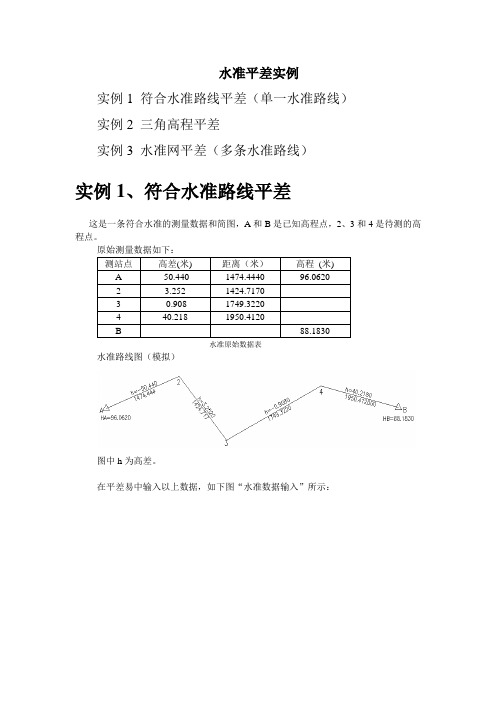
水准平差实例实例1 符合水准路线平差(单一水准路线)实例2 三角高程平差实例3 水准网平差(多条水准路线)实例1、符合水准路线平差这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的高程点。
测站点高差(米) 距离(米)高程(米)A -50.440 1474.4440 96.06202 3.252 1424.71703 -0.908 1749.32204 40.218 1950.4120B 88.1830水准原始数据表水准路线图(模拟)图中h为高差。
在平差易中输入以上数据,如下图“水准数据输入”所示:水准数据输入在测站信息区中输入A、B、2、3和4号测站点,其中A、B为已知高程点,其属性为01,其高程如“水准原始数据表”;2、3、4点为待测高程点,其属性为00,其它信息为空。
因为没有平面坐标数据,故在平差易软件中没有网图显示。
根据控制网的类型选择数据输入格式,此控制网为水准网,选择水准格式,如下图“选择格式”所示:选择格式注意:1、在“计算方案”中要选择“一般水准”,而不是“三角高程”。
“一般水准”所需要输入的观测数据为:观测边长和高差。
“三角高程”所需要输入的观测数据为:观测边长、垂直角、站标高、仪器高。
2、在一般水准的观测数据中输入了测段高差就必须要输入相对应的观测边长,否则平差计算时该测段的权为零,因此导致计算结果错误。
在观测信息区中输入每一组水准观测数据测段A点至2号点的观测数据输入(观测边长为平距)如下图“A->2观测数据”所示:A->2观测数据测段2号点至3号点的观测数据输入如下图“2->3观测数据”所示:2->3观测数据测段3号点至4号点的观测数据输入如下图“3->4观测数据”所示:3->4观测数据测段4号点至B点的观测数据输入如下图“4->B观测数据”所示:4->B观测数据以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A):[STATION]A,01,,,96.062000B,01,,,88.1830002,003,004,00[OBSER]A,2,,1474.444000,-50.44002,3,,1424.717000,3.25203,4,,1749.322000,-0.90804,B,,1950.412000,40.2180平差计算选择菜单“平差->闭合差计算”,计算该水准路线的高差闭合差。


高程平差方法举例说明引言在工程建设中不免要对高程控制网进行高精度计算,手工计算对于较为简单的控制网还可适应,但对于较为复杂、节点较多的高程控制网来讲使用手工计算容易出现误差且非常耗时,因此我们针对高程控制网的平差计算原理进行了分析,并利用这一原理结合计算机技术进行了高效的控制网平差计算。
1 平差模型的建立1. 1 平差原理下面以一个水准网的算例来说明水准网间接平差原理,水准网如图1 所示:已知A 点高程HA=237. 483m,为求B、C、D 三点的高程,进行了水准测量,观测结果为见图1, h1、h2、h3、h4、h5 分别为观测值,对应的水准路线长度为S1、S2、S3、S4、S5。
取B、C、D 三点的高程值平差值为参数,其近似值为X01、X02、X03 其中:X01=HA+h1; X02=HA+h3; X03=HA+h5 于是观测值误差方程为v:常数项l:权P:如下:其中:改正数V= 系数阵A= 参数x= 常数项l=可以解出由此可以计算出高程平差值由上可知,水准网间接平差主要分为三个步骤:(1)高程近似值的计算;(2)列立观测值的误差方程;(3)解误差方程并求高程平差值。
1. 2 常数项矩阵的问题在求近似高程时,同一个未知点的近似高程并不是唯一的一个确定值,它的值随着计算时选择的线路不同而改变,因此得出的常数项矩阵L 也并不是唯一的,在下面的程序计算里面,输入已知数据时线路的排序不同,得出的常数项矩阵L 也不同,当然最后得到的高程改正数也不一样,由于进行平差计算时设的未知数就是未知点高程的近似值,因此在最后得到的未知点的高程平差值跟计算高程近似值时选择的线路无关,只要计算正确,最终得到的高程平差值也是正确的。
这一点可以在使用程序的过程中进行检验,无论线路排序如何改变,只要数据输入正确,得到的结果是一样的。
2 平差程序设计2. 1 关于程序语言的选用考虑到本软件所要解决的问题主要是数据的处理与计算,不涉及到计算机系统底层的操作,因此选用相对简单的Visual Basic 6. 0 来进行程序的编写,使用间接平差模型,在保证计算精度的同时,一来减少了代码编写的难度,二来提高了代码执行的效率。

水准测量平差计算
水准测量平差计算是水准测量中的一项重要工作,主要是对测量数据进行分析处理,消除误差和残差,以求得较为准确的高程结果。
具体步骤如下:
1. 建立观测方程
在水准测量中,设定起点高程为0,然后逐站向前观测,求出每个站点的高程。
建立每个站点高程的观测方程,包括自由高差和永久高差的影响。
2. 矩阵方程式
将所有观测方程进行矩阵变换,消除自由高差,得到纯高差矩阵方程组。
3. 固定高程点的影响
将所有观测方程加上固定高程点的影响,消除永久高差,得到纯高差矩阵方程组。
4. 最小二乘方法
利用最小二乘方法解出平差后的高差平差值,分别确定每个站点的高程。
5. 残差分析
对于每个观测方程都会有一个残差,其代表了实际测量值与计算值之间的差异。
进行残差分析,可发现数据中的误差规律和存在的误差来源,为后续的测量和处理提供参考和改进。
6. 高程精度分析
通过对整个水准测量的误差分析和精度分析,得出测量结果的可靠性和精度,为后续的工作提供指导和帮助。


一、水准网条件平差示例 范例:有一水准网(如图8-3所示),已知点A ,B 的高程为: HA=50.000m , HB=40.000 m ,观测高差及路线长度见表8-1。
试用条件平差求:(1) 各观测高差的平差值;(2) 平差后P 1到P 2点间高差的中误差。
图8-3【解】1)、求条件方程个数;由图易知:n=7,t=3,条件式r=4。
故应列4个平差值条件方程,三个闭合环,一个附和路线2)、列平差值条件方程; 所列4个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=-+-=--=-+=+-0ˆˆ0ˆˆˆ0ˆˆˆ0ˆˆˆ31643765521BA H H h h h h h h h h h h h 3)、转换成改正数条件方程;以ii i V L L +=ˆ代入上式可得: ⎪⎪⎭⎪⎪⎬⎫=-+-+-=--+--=-++-+=+-++-00003131643643765765521521B A H H h h v v h h h v v v h h h v v v h h h v v v 化简可得:⎪⎪⎭⎪⎪⎬⎫=--=+--=+-+=++-0403070731643765521mm mm mm mm v v v v v v v v v v v 可知条件方程系数阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----000101010110011100000010011⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2101001000210000210000010000001称对P ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2010010002000020000010000001称对Q ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----=320125100141101300100110001101001100000110010002010102200211000000100114)、组成法方程; 先求权阵P ;以1km 观测高差为单位权观测高差,则: 11=P ,12=P ,213=P ,214=P ,15=P ,16=P ,217=P ,而各观测高差两两相互独立,所以权阵为:,则协因数阵为:则,法方程的系数阵Naa 为:⎥⎥⎦⎤⎢⎢⎣⎡-----⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----==-=00010101011001110000001001120100100020000200000100000010001010101100111000000100111TT AQA T A AP aa N 称对所以,法方程为:043773212510014110134321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----k k k k 5)、解算法方程,求出联系数K⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡34831.213483.002247.177528.2437758427.025843.012360.023596.025843.032584.011236.012360.012360.011236.031461.014607.023596.012360.014608.046067.04377320125100141101314321k k k k 6)、求V 及高差平差值Lˆ 所以4210.212.118.3213.0214.418.214.0ˆ22222220⨯+⨯-+⨯-+⨯-+⨯-+⨯+⨯-==)()()()()(r PV V T σ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡==045.2157.1798.3270.0427.4775.2427.034831.213483.002247.177528.2002001100011020022000001100134831.213483.002247.177528.200001010101100111000000100112010010002000020000010000001m m T K T QA V 称对mmmm v v v v v v v h h h h h h h h h h h h h h L ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=5020.108548.56472.45007.143556.200028.153556.100.22.18.33.04.48.24.0500.10856.5651.4501.14360.20000.15356.10ˆˆˆˆˆˆˆˆ7654321765432176543217)、精度评定1)、单位权方差估值计算mm 98.24605.35±==2)、建立所求精度的平差值函数的算式,并按误差传播律求平差值函数的精度 依题意列平差值函数为: 5ˆh =ϕ 则:[]Tf 0010000=[][][][]51687.048313.01)16853.3146.0(1001111236.001124.016853.03146.0100110011111ˆˆ=-=+-=⨯---=-=-=--TTT T T aaaa N AQf N QA f Qf fQ ϕϕ所以:mm Q 14.251687.098.2ˆˆ0ˆ±=⨯==ϕϕϕσσ【答】:各观测高差的平差值为:}{m m m m m m m5020.108548.56472.45007.143556.200028.153556.10平差后P1到P2点间高差的中误差为:±2.14mm987654321ACPB 图8-11二、测角网条件平差 范例:有一测角网(如图8-11所示),A 、B 、C 三点为已知三角点,P 为待定点。
附合水准路线测量成果计算表
1. 测量点编号,记录测量点的编号,以便对应不同的测量点。
2. 测站,测量所在的测站名称或编号。
3. 观测日期,进行水准观测的日期。
4. 观测时间,记录每次观测的具体时间。
5. 基准点高程,基准点的已知高程。
6. 测点高程,测量点的高程测量值。
7. 线路长度,测量线路的长度。
8. 观测方法,使用的水准观测方法,例如闭合回路、三角测量等。
9. 仪器,使用的水准仪器的型号和规格。
10. 观测人员,参与水准观测的人员姓名或编号。
在计算表中,通常会包括以下计算内容:
1. 观测数据处理,包括观测数据的校核、平差和处理过程。
2. 高程改正数,根据观测数据计算得出的高程改正数。
3. 最终高程,根据高程改正数修正后得出的最终高程值。
4. 精度评定,对测量结果的精度进行评定,包括精度等级和误
差限等信息。
以上是一般情况下附合水准路线测量成果计算表可能包括的内容。
针对具体的测量项目和要求,表格的具体内容可能会有所不同。