Z3040摇臂钻床电气原理图(2)
- 格式:docx
- 大小:21.23 KB
- 文档页数:5
摘要随着科学技术的迅猛发展,一些价格昂贵的机床面临被淘汰的噩运,这样会造成很大的浪费,因此对传统机床进行改造是节约资源的很好方法。
本论文是研究机械加工中常用的Z3040摇臂钻床传统电气控制系统的改造问题,旨在解决传统继电器—接触器电气控制系统存在的线路复杂、可靠性稳定性差、故障诊断和排除困难等难题。
由于PLC电气控制系统与继电器—接触器电气控制系统相比,具有结构简单,编程方便,调试周期短,可靠性高,抗干扰能力强,故障率低,对工作环境要求低等一系列优点。
因此,本论文对Z3040摇臂钻床电气控制系统的改造,将把PLC控制技术应用到改造方案中去,从而大大提高摇臂钻床的工作性能。
论文分析了摇臂钻床的控制原理,制定了可编程控制器改造Z3040摇臂钻床电气控制系统的设计方案,完成了电气控制系统硬件和软件的设计,其中包括PLC机型的选择、I/O端口的分配、I/O硬件接线图的绘制、PLC梯形图程序的设计。
对PLC控制摇臂钻床的工作过程作了详细阐述,论述了采用PLC取代传统继电器—接触器电气控制系统从而提高机床工作性能的方法,给出了相应的控制原理图。
关键词:可编程控制器、摇臂钻床、钻深精度、电气控制系统ABSTRACTThis paper is to studies the machine process in common use Z3040 in inside radial drilling machine electric control system improves problem. The aim is solving device complexity, inferior reliability and stability, malfunction analysis and trouble obviation of the traditional relay electric control system. Because of electric control system PLC there are lots of advantages which include design, install, connect the line and adjust to try workload small, the period of research and manufacture is short, reliability is high, the ability of Anti- interference is very strong, the rate of break down is low, the demand of work environment is low, maintenance convenience a series of advantage etc. Therefore, a work for to the Z3040 radial drilling machine electric control system reforming, will reforming PLC control technique application in the project, then increasing radial drilling machine’s work function. The paper introduces to the control principle of the radial drilling machine. Established the programmable controller improve the design project of electric control system of Z3040 radial drilling machine. Completed the design of the software and hardware of the electric control system, Among them include the model of PLC choice、the I/O allotment of the address、the I/O hardware connects the line diagram、PLC trapezium diagram’s design. It explains that PLC control the work process of radial drilling machine. Discussing the adoption PLC replaces the traditional ele ctric control system’s method and increases the work function of radial drilling machine, give a homologous control principle diagram.Key words: PLC、Radial drilling machine、Trapezium diagram、Electric Control System目录第一章绪论 (1)1.1本课题的选题背景和意义 (1)1.2国内外关于本课题的技术研究现状和发展动态 (2)第二章 Z3040摇臂钻床的结构原理分析 (4)2.1Z3040摇臂钻床的主要结构和运动形式 (4)2.1.1 钻床的主要结构 (4)2.1.2 钻床的运动形式 (5)第三章Z3040摇臂钻床电气控制线路工作原理 (7)第四章 PLC的基本结构 (14)4.1PLC的基本结构 (14)4.2PLC的工作过程 (16)4.2.1 输入采样阶段 (16)4.2.2 程序执行阶段 (16)4.2.3 输出刷新阶段 (17)4.3PLC型号的选择 (17)4.3.1 根据PLC的物理结构 (17)4.3.2 根据PLC的指令功能 (17)4.3.3 根据PLC的输入输出点数 (18)4.3.4 根据PLC的存储容量 (18)4.3.5 根据输入模块的类型 (18)4.3.6 根据输出模块的类型 (18)第五章 Z3040摇臂钻床控制系统的PLC改造分析 (20)5.1概述 (20)5.2改造难点分析 (20)5.3PLC的选择 (21)5.3.1 I/O分配 (22)5.3.2 PLC外部结构接线图 (22)5.3.3 梯形图 (23)5.3.4 指令 (25)结论 (26)1研究成果 (26)2不足之处 (26)致谢 (27)参考文献 (28)第一章绪论1.1 本课题的选题背景和意义Z3040摇臂钻床是工厂中常用的金属切削机床,它可以进行多种形式的加工,如:钻孔、镗孔、铰孔及螺纹等。

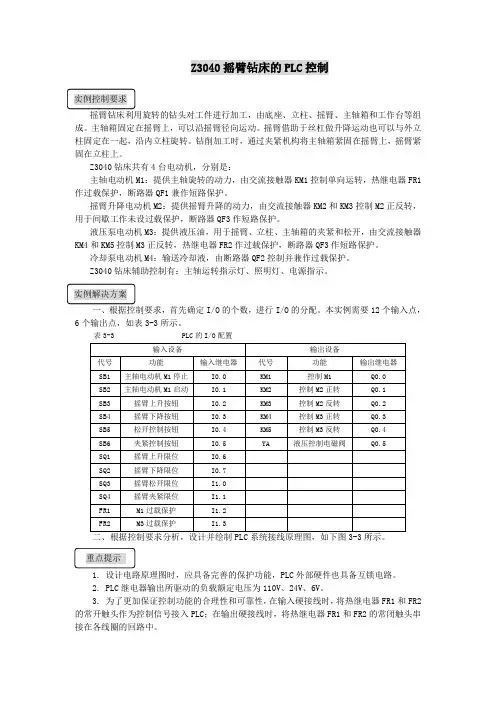
Z3040摇臂钻床的PLC 控制摇臂钻床利用旋转的钻头对工件进行加工,由底座、立柱、摇臂、主轴箱和工作台等组成。
主轴箱固定在摇臂上,可以沿摇臂径向运动。
摇臂借助于丝杠做升降运动也可以与外立柱固定在一起,沿内立柱旋转。
钻削加工时,通过夹紧机构将主轴箱紧固在摇臂上,摇臂紧固在立柱上。
Z3040钻床共有4台电动机,分别是:主轴电动机M1:提供主轴旋转的动力,由交流接触器KM1控制单向运转,热继电器FR1作过载保护,断路器QF1兼作短路保护。
摇臂升降电动机M2:提供摇臂升降的动力,由交流接触器KM2和KM3控制M2正反转,用于间歇工作未设过载保护,断路器QF3作短路保护。
液压泵电动机M3:提供液压油,用于摇臂、立柱、主轴箱的夹紧和松开,由交流接触器KM4和KM5控制M3正反转,热继电器FR2作过载保护,断路器QF3作短路保护。
冷却泵电动机M4:输送冷却液,由断路器QF2控制并兼作过载保护。
Z3040钻床辅助控制有:主轴运转指示灯、照明灯、电源指示。
一、根据控制要求,首先确定I/O 的个数,进行I/O 的分配。
本实例需要12个输入点,6个输出点,如表3-3所示。
表3-3 PLC 的I/O 配置1. 设计电路原理图时,应具备完善的保护功能,PLC 外部硬件也具备互锁电路。
2. PLC 继电器输出所驱动的负载额定电压为110V 、24V 、6V 。
3. 为了更加保证控制功能的合理性和可靠性,在输入硬接线时,将热继电器FR1和FR2的常开触头作为控制信号接入PLC ;在输出硬接线时,将热继电器FR1和FR2的常闭触头串接在各线圈的回路中。
图3-3(a) PLC系统接线原理图1 Array图3-3(b ) Plc系统接线原理图2三、安装与接线1.材料准备:根据接线原理图,列出需要的所有材料清单,如表3-4所示。
(1)选择电器元件时,要根据设备的操作任务和操作方式,确定所需元件,并考虑元件的数量、型号、额定参数和安装要求。
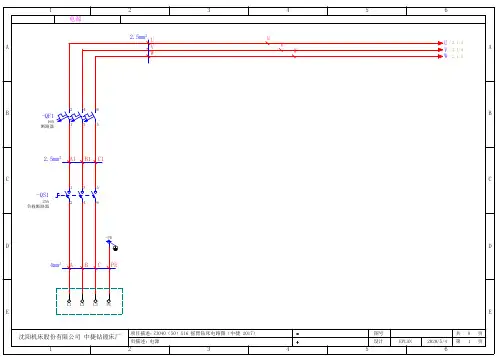
12345控制变压器保护QF21照明和指示灯电源主轴箱立柱SB1主电机控制起动停止横臂升降控制上升下降液压泵电机松开夹紧通电延时分配阀主轴箱立柱SA闭35XT1XT2SB413XT215XT2SQ2KM1C11XT2SB521XT217XT2SB4SB5DXT2(常开触点)延时闭合KT3E492."6XT137XT2SB639XT1XT2KT3G41XT243SQ343XT2SB6SB7KT2D49XT1XT2SA4955XT2XT357XT2XT353XT2ASB2TC4.DUV~110V241~24VXT1XT2QF3243XT5SB37XT2SQ125XT2摇臂降下限位断电延时摇臂夹紧到位(断开)SB715-60°摇臂升上限位BB摇臂松开,升降切换摇臂松开到位闭合KT2GSQ231XT2KT2HSQ4CSQ527XT2KM2D29KM5D33(常闭触点)延时闭合KT1C45KT1HKM4D断电延时型号M1容量380V220VQF1FR2Z电245XT1XT2247XT1XT2KM3D192.2FR1BXT1PEXBNXT1XT2ELXT5HL1HL2HL3KM1B1.C2."C1.C1.CB断电延时4FR2B断电延时通电延时4.CKT1B3.D4."C4.CKM2B3.C3."C3.C3.CKM3B3.C3."C3.C3.CKM4B3.C4."C3.C3.CKM5B4.C3."C4.C4.CKT2B3.C3.C4.DKT3A3.D4.CYA1YA2使用说明书第30页(3)摇臂升降按上升(或下降)按钮SB4(或SB5),时间继电器KT1吸合,使交流接触器KM4得电吸合,液压泵电机M3旋转,压力油经分配阀进入摇臂松开油腔,推动活塞和菱形块使摇臂松开.同时活塞杆通过弹簧片压限位开关SQ2,使交流接触器KM4失电释放,交流接触器KM2(或KM3)得电吸合,液压泵电机M3停止旋转,升降电机M2旋转,带动摇臂上升(或下降)。
Z3040型摇臂钻床的电气控制线路钻床可进行钻孔、扩孔、铰孔、镗孔及攻丝,因此要求钻床的主运动和进给运动有较宽的调速范围。
钻床的调速一般是通过三相异步电机和变速箱来实现的,也有的是用多速异步电动机拖动以简化变速机构。
Z3040型摇臂钻床适合于在大、中型零件上进行孔加工,其运动形式有:主轴的旋转运动、进给运动、摇臂的升降运动、立柱的夹紧和放松、摇臂的回转和主轴箱的左右移动。
主轴的旋转运动和进给运动由一台异步电动机拖动,摇臂的升降由一台异步电动机拖动,摇臂、立柱和主轴箱的松夹由一台液压泵电动机拖动,摇臂的回转和主轴箱的左右移动通常采纳手动。
此外还有一台冷却泵电动机对刀具和工件进行冷却。
加工螺纹时,主轴需要正反转,该机床采纳机械变换方法来实现,故主电动机只有一个旋转方向。
此外,为保证平安生产,其主轴旋转和摇臂升降不允许同时进行。
Z3040型摇臂钻床的电气掌握线路图如图所示。
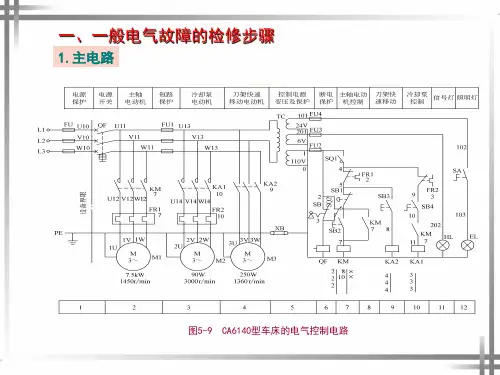
一、主电路Z3040型摇臂钻床的主电路、掌握电路和信号电路的电源均采纳自动开关引入,自动开关中的电磁脱扣作为短路爱护取代了熔断器。
主电动机M1的接通和断开由接触器KM1掌握,升降电动机M2的正反转由接触器KM2、KM3掌握,液压泵电动机M3的正反转由接触器KM4、KM5掌握。
M1和M3分别用热继电器FR1和FR2作过载爱护,升降电动机M2和冷却泵电动机M4均为短时工作,未设过载爱护。
二、掌握电路掌握电路扼电源由掌握变压器TC二次侧输出110V供电,中间抽头603对地为信号灯电源6.3V,241号线对地为照明变压器TD二次侧输出36V。
1、主电动机的旋转掌握在主电动机启动前,首先将自动开关Q2、Q3、Q4扳到接通状态,同时将配电盘的门关好并锁上。
然后再将自动开关Q1扳到接通位置,电源指示灯亮。
这时按下总启动按钮SB1,中间继电器KA1通电并自锁,为主电动机与其他电动机的启动做好了预备。
当按下主电动机启动按钮SB2时,接触器KM1线圈通电并自锁,使主电动机M1旋转,同时主电动机旋转的指示灯HL4亮。
Z3040摇臂钻床控制电路一、实训目的1、了解Z3040摇臂钻床电路的工作原理。
2、熟悉低压电器的工作原理及构造。
3、掌握Z3040摇臂钻床故障排除方法。
二、注意事项1、ZY-Z3040摇臂钻床故障考核装置采用实际工作电路,电源均采用380V,实训中,不要用手触摸器件接线端子、测试孔,以防触电。
2、电路上电必需经过老师许可。
3、排除故障时,应在确定故障后再进行操作,ZY-Z3040A车床故障考核装置将对每次操作进行记录,操作错误将影响实训成绩。
4、发生异常时应立即按下电源控制屏紧急按钮,查明事故原因后方可上电。
三、实训内容1、Z3040摇臂钻床电路主电路参考原理图如图4.1.1所示:2、Z3040摇臂钻床电路控制电路参考原理图如图4.1.2所示:四、实验器材:万用表、Z3040摇臂钻床故障考核装置实训台1台。
五、工作原理:Z3040摇臂钻床电路主要由冷却泵电机、冷却泵电机控制、主轴电机、主轴电机控制、摇臂升降电机、摇臂升降电机控制、液压泵电机控制、照明及指示电路等部分组成。
其所实现的不同功能如下所述:电源、照明及指示电路:电源、照明及指示电路由变压器T、熔断器FU1、FU2、FU3、照明旋钮SA2、照明灯EL、松开夹紧指示灯HL1、HL2、主轴工作指示灯HL3组成,由变压器T分别提供220V控制电源、24V低压照明电源、6.3V状态指示灯工作电源。
主轴电机控制原理:主轴电机控制主要由按钮SB1、SB2、交流接触器KM1、热保护继电器FR1组成自锁电机控制电路。
SB1为停止按钮、SB2为启动控制按钮,FR1为主轴电机过热保护器;通过利用KM1的常开辅助触点自锁实现主轴电机的自锁控制。
主轴的正、反转、停车制动、空挡、预选与变速均通过一套液压系统来进行,通过主轴电机拖动齿轮泵输送压力油来实现控制,HL3为主轴电机工作指示灯,通过在HL3回中串入KM1的常开触点来控制。
摇臂升降控制:摇臂升降控制由升、降控制按钮SB3、SB4、升、降控制按钮接触器完实现控制,其中SQ1、SQ2分别为上升和下降限位行程开关,SQ3为摇臂松开到位开关;SQ4为摇臂夹紧到位开关,当摇臂夹紧时,SQ4一直处于受压状态,其常闭触点此时处于断开;在摇臂升降控制过程中,Z3040采用另一套油压控制系统来进行摇臂的夹紧和松开的控制,其压力油通过KM4、KM5对液压泵电机的正反转控制来实现输送正、反向压力油;摇臂的上升控制过程为按下SB3,SB3常闭触点断开KM3回路,实现互锁,同时由于SB3常开触点闭合,KT得电,使KT瞬动触点闭合,电源由SB3、摇臂上升限位开关SQ1、摇臂松开到位开关SQ3、KT瞬动触点、KM5常闭辅助触点使KM4得电,控制液压泵电机输入正向压力油,同时KT断电延时常闭触点立即断开KM5回路,实现冷却泵电机互锁;而KT断电延时常开触点立即闭合接通电磁阀YA,使压力油输送至摇臂松开、夹紧侧油路,控制摇臂松开、夹紧;当摇臂松开到位时,SQ3常闭触点断开KM4控制回路,液压泵电机停止正向输送压力油,同时SQ3常开触点闭合,接通KM2控制回路,摇臂电机开始正转,摇臂上升,当到达过所需位置时,松开SB3、断开KM2、KT回路、摇臂停止上升,2~3秒后,KT断电延时常闭触点闭合,KT断电延时常开触点断开,由于此时摇臂处于松开状态,SQ4常闭触点处于闭合,同时接通KM5及YA,通过液压泵反向运行输送压力油控制摇臂夹紧,当夹紧到位后,SQ4受压断开KM5、YA回路,完成摇臂上升控制。
Z3040摇臂钻床电气控制电路讲解钻床是一种用途广泛的万能机床,可以进行钻孔、扩孔、铰孔、攻螺纹及修剖面等多种形式的加工。
钻床按结构形式可分为立式钻床、卧式钻床、摇臂钻床、深孔钻床等,在各种钻床中,摇臂钻床操作方便,灵活,适用范围广,特别适用于单件或成批生产中带有多孔大型工件的孔加工,是机械加工中常用的机床设备。
如下图所示是典型的Z3040摇臂钻床的电气控制电路,下表格中列出了其主要电气元件。
Z3040摇臂钻床电气控制电路图Z3040摇臂钻床电气控制电路图,点击图片看大图Z3040摇臂钻床主要电器元件表:Z3040摇臂钻床电气元件表Z3040摇臂钻床电气元件表根据Z3040摇臂钻床的加工要求,应完成下列几种运动方式的控制:主运动:主轴的旋转运动及进给运动。
辅助运动:摇臂沿外立柱的垂直移动,主轴箱沿摇臂的径向移动及摇臂与外立柱一起相对于内立柱的回转运动,后者为手动。
另外还要考虑主轴箱、摇臂、内外立柱的夹紧和松开。
由于摇臂钻床运动部件较多,常采用多电机拖动。
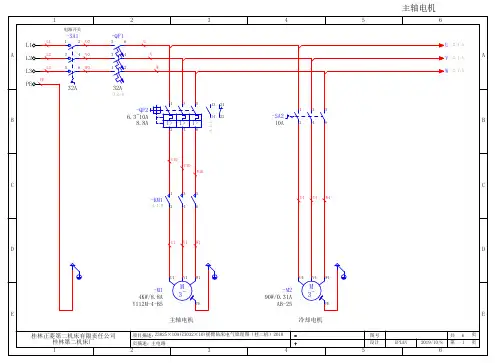
图中M1为主轴电动机,M2为摇臂升降电动机,M3为液压泵电动机,M4为冷却泵电动机。
主电路分析M1为单向旋转,接触器KM1控制,主轴的正反转则由机床液压系统操纵机构配合正反转摩擦离合器实现,并由热继电器FR1作电动机M1的长期过载保护。
M2的正反转由正反转接触器KM2、KM3控制。
控制电路保证,在操纵摇臂升降时,首先使液压泵电动机起动旋转,送出压力油,经液压系统将摇臂松开,然后才使M2起动,拖动摇臂上升或下降,当移动到位后,控制电路又保证M2先停下,再自动通过液压系统将摇臂夹紧,最后液压泵电动机才停转,M2为短时工作,不用设长期过载保护。
M3由接触器KM4、KM5实现正、反转控制,并有热继电器FR2作长期过载保护。
M4电动机容量较小,仅为0.125kW,所以由开关SA1直接控制。
控制电路分析一、主轴电动机控制:由按钮SB1、SB2与KM1构成主轴电动机的单向起动停止控制电路,M1起动后,指示灯HL3亮,表示主轴电动机在旋转。
12345控制变压器保护
QF2
1照明和指示灯
电源主轴箱立柱
SB1主电机控制
起动停止横臂升降控制上升下降液压泵电机松开夹紧通电延时分配阀主轴箱立柱SA闭35
XT1
XT2SB4
13XT215XT2SQ2
KM1C
11
XT2SB5
21XT217XT2SB4SB5DXT2(常开触点)延时闭合KT
3E492."6XT137XT2
SB639XT1XT2
KT3G41XT243SQ3
43XT2SB6SB7
KT2D49XT1XT2
SA49
55XT2XT357XT2XT353XT2ASB2
TC
4.DU
V~110V
241
~24VXT1
XT2
QF3
243
XT5SB37
XT2SQ125XT2摇臂降下限位断电延时摇臂夹紧到位(断开)SB715-60°摇臂升上限位
BB摇臂松开,升降切换摇臂松开到位闭合KT2GSQ2
31XT2KT2HSQ4
CSQ5
27XT2KM2D
29KM5D33(常闭触点)延时闭合KT1C
45
KT1HKM4D断电延时型号M1容量380V220VQF1FR2Z电245
XT1
XT2247
XT1
XT2KM
3D192.2
FR1B
XT1
PEXB
NXT1
XT2
ELXT5
HL1HL2HL3KM1B
1.C
2."C
1.C
1.C
B断电延时4FR2B断电延时通电延时4.CKT1B
3.D
4."C
4.CKM2B
3.C
3."C
3.C
3.CKM3B
3.C
3."C
3.C
3.CKM4B
3.C
4."C
3.C
3.CKM5B
4.C
3."C
4.C
4.CKT2B
3.C
3.C
4.DKT3A
3.D
4.CYA1YA2使用说明书第30页
(3)摇臂升降
按上升(或下降)按钮SB4(或SB5),时间继电器KT1吸合,使交流接触器KM4得电吸合,液压泵电机M3旋转,压力油经分配阀进入摇臂松开油腔,推动活塞和菱形块使摇臂松开.同时活塞杆通过弹簧片压限位开关SQ2,使交流接触器KM4失电释放,交流接触器KM2(或KM3)得电吸合,液压泵电机M3停止旋转,升降电机M2旋转,带动摇臂上升(或下降)。
如果摇臂没有松开,限位开关SQ2常开触点不能闭合,
交流接触器KM2(或KM3)就不能得电吸合,摇臂不能升降。
当摇臂上升(或下降)到所需的位置时,松开按钮SB4(或SB5),交流接触器KM2(或KM3)和时间继电器KT1失电释放,升降电机M2停止旋转,摇臂停止上升(或下降)。
由于时间继电器KT1失电释放,经1~
1."5秒延时后,其延时闭合的常闭触点闭合,交流接触器KM5得电吸合,液压泵电机M3反向旋转,供给压力油,压力油经分配阀进入摇臂夹紧油腔,使摇臂夹紧。
同时活塞杆通过弹簧片压限位开关SQ3,使交流接触器KM5失电释放,液压泵电机M3停止旋转。
行程开关SQ1a.SQ1b用来限制摇臂的升降行程,当摇臂升降到极限位置
时,SQ1a.SQ1b动作,交流接触器KM2(或KM3)断电,升降电机M2停止升降。
摇臂的自动夹紧是由限位开关SQ3来控制的。
如果液压夹紧系统出现故障,不能自动夹紧摇臂或由于SQ3调整不当,在摇臂夹紧后不能使SQ3的常闭触点断开,都会使液压泵电机处于长时间过载运行状态,造成损坏。
为了防止损坏液压泵电机,电路中使用热继电器FR2,其整定值应根据液压泵电机的额定电流进行调整。
(4)立柱和主轴箱的松开或夹紧即可单独进行,又可同时进行
(a)立柱和主轴箱的松开或夹紧同时进行:
首先把转换开关SA扳到中间位置,这时按松开(或夹紧)按钮SB6(或SB7),时间继电器KT
2."KT3同时得电吸合,其延时开启的常闭触点闭合,电磁铁YA
1."YA2得电吸合,而时间继电器KT3的延时。