室内线阵CCD交汇测量捕获率分析
- 格式:pdf
- 大小:232.72 KB
- 文档页数:3
目录第一章电荷耦合元件......................................................................................................... - 1 - 1.1电荷耦合元件简介.. (1)1.1.1 CCD的基本原理 .................................................................................................. - 1 -1.1.2线阵CCD .............................................................................................................. - 2 -1.2CCD功能特性 (3)1.3CCD的应用 (3)第二章使用线阵型CCD 实现高精度二维位置测量的方法.......................................... - 6 - 2.1二维位置测量系统设计实例. (6)2.1.1 球面镜—柱面镜组合的特性............................................................................... - 6 -2.1.2 二维位置测量光学系统....................................................................................... - 6 -2.1.3 高精度二维位置测量系统................................................................................... - 7 -2.2光学系统设计. (9)2.2.1 二维位置测量的应用........................................................................................... - 9 -2.2.2 光学系统设计....................................................................................................... - 9 -结论..................................................................................................................................... - 11 - 参考文献............................................................................................................................. - 12 -第一章 电荷耦合元件1.1 电荷耦合元件简介电荷耦合元件(CCD ),英文全称Charge-coupled Device 。

实验5 线阵 C CD 应用实验电荷耦合器件(Charge coupled devices)是70年代初期发现的新型集成光电传感器件。
它有线阵列与面阵列两种基本类型,各有不同的工作原理与特性。
它们的应用为机器视觉领域的改革创新立下了汗马功劳,使机器有了获取70%以上信息的能力,加之它易于与计算机配合,使机器安装“眼睛”与“大脑”成为可能,使机器走向自动化、智能化的趋势进入现实阶段。
线阵CCD的工作原理简单,易于掌握,而它在机器视觉领域的地位举足轻重。
线阵CCD 通常用于工业领域的非接触自动检测设备上,尤其是自动化生产过程或生产线上,用作在线非接触光电检测设备或俗称为“电眼”。
非接触检测物体的尺寸、运动速度、加速度、运动规律、位置、面形、粗糙度、变形量、光学特性变化、条码信息和其他应用。
本实验共有9 项实验容,前2 项实验属于原理性或认识性实验,实验3~9 属于典型应用的实验,学生通过这些代表性的应用实验能够充分认识与理解线阵CCD 在工业领域非接触测量工作中的重要地位。
(一)线阵CCD 原理与驱动特性一、实验目的1、掌握彩色线阵CCD开发应用实验仪的基本操作和功能。
2、掌握用双踪迹示波器观测二相线阵CCD驱动脉冲的频率、幅度、周期和各路驱动脉冲之间的相位关系等测量方法。
3、通过对典型线阵CCD 驱动脉冲的时序和相位关系的观测,掌握二相线阵CCD的基本工作原理,尤其要掌握RS 复位脉冲与CR1、CR2 驱动脉冲间的相位关系,分析它对CCD输出信号的影响。
SH转移脉冲与CR1、CR2驱动脉冲间的相位关系,掌握电荷转移的几个过程。
二、实验仪器1.LCCDAD-Ⅱ-A型线阵CCD应用开发实验仪一台;2.装有VC++软件及相关实验软件的PC计算机一台;3.双踪迹同步示波器(推荐使用数字示波器,带宽应在50MHz以上)一台;三、实验容及步骤1.实验预备(1)首先将示波器的地线与实验仪上的接地线连接好,并确认示波器和实验仪的电源插头均已插入交流220V电源插座上;(2)取出双踪迹同步示波器的测试探头待用;(3)打开示波器的电源开关,选择自动测试方式(按下示波器右上角“自动设置”按钮),旋转“垂直设置”旋钮,调整显示屏上出现的扫描线处于便于观图1-1线阵CCD的参数设置界面察的位置;(4)通过USB总线将实验仪与计算机或GDS-Ⅲ实验平台的USB输入端口相连;(5)将LCCDAD-Ⅱ-A型线阵CCD应用开发实验仪的电源开关打开,红色指示灯亮;(6)启动计算机,打开桌面上的快捷方式“线阵CCD”,点击“1-LV”,弹出如图1-1所示的执行界面,点击需要设置的参数,该参数会以较大数字显示在下方,用鼠标点击“设置”,完成设置工作。
基于线阵CCD 的尺寸测量研究及误差分析余 震(安徽建筑工业学院数理系,合肥230022) 文 艺(武汉重工铸锻有限责任公司质管处,武汉430084)摘 要 通过分析基于线阵CCD 器件的一维尺寸测量原理,系统讨论了基于CCD 器件各种一维尺寸的测量方案,同时分析了各种测量方案所产生的测量误差的计算方法。
关键词 线阵CCD 尺寸测量 误差分析一、前言基于CCD 的尺寸测量一般采用非接触测量方式,由于CCD 器件[1]有精度高、动态性能好、便于同计算机组成高性能测控系统等特点,被广泛的应用于各种加工件的在线检测和高精度、高速度的检测技术领域。
采用CCD 器件进行尺寸测量时,随着被测尺寸大小的不同,所采用的检测方案及相应产生的测量误差也不同,本文就采用CCD 器件进行一维尺寸测量的测量原理、所采用的测量方案及相应的测量误差进行分析,并给出具体计算公式。
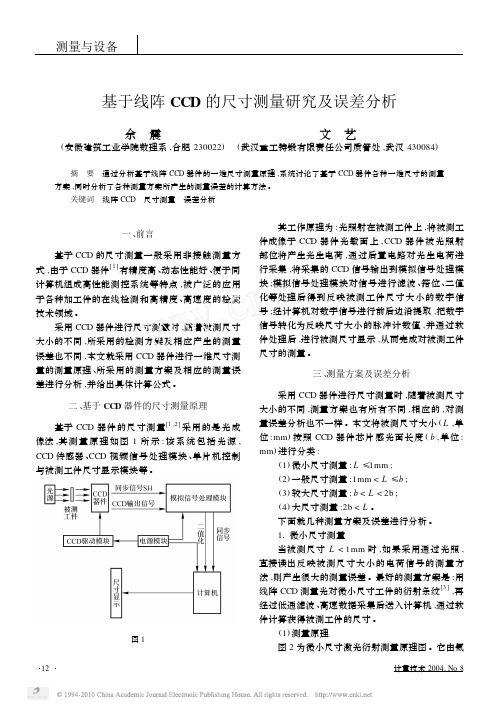
二、基于CCD 器件的尺寸测量原理基于CCD 器件的尺寸测量[1,2]采用的是光成像法,其测量原理如图1所示:该系统包括光源,CCD 传感器、CCD 视频信号处理模块、单片机控制与被测工件尺寸显示模块等。
图1其工作原理为:光照射在被测工件上,将被测工件成像于CCD 器件光敏面上,CCD 器件被光照射部位将产生光生电荷,通过后置电路对光生电荷进行采集,将采集的CCD 信号输出到模拟信号处理模块;模拟信号处理模块对信号进行滤波、箝位、二值化等处理后得到反映被测工件尺寸大小的数字信号;经计算机对数字信号进行前后边沿提取,把数字信号转化为反映尺寸大小的脉冲计数值,并通过软件处理后,进行被测尺寸显示,从而完成对被测工件尺寸的测量。
三、测量方案及误差分析采用CCD 器件进行尺寸测量时,随着被测尺寸大小的不同,测量方案也有所有不同,相应的,对测量误差分析也不一样。
本文将被测尺寸大小(L ,单位:mm )按照CCD 器件芯片感光面长度(b ,单位:mm )进行分类:(1)微小尺寸测量:L ≤1mm ;(2)一般尺寸测量:1mm <L ≤b ;(3)较大尺寸测量:b <L <2b ;(4)大尺寸测量:2b <L 。
THQXZ-1型线阵CCD器件特性一、实验目的1.了解CCD器件的工作原理。
2.观测入射光强、ROG信号、CLK信号与CCD输出信号的关系。
3.测量微小物体的直径。
4.测量遮光条的档条宽度。
二、实验仪器THQXZ-1型线阵CCD器件特性实验仪,计算机(配备CCD图像采集软件)三、实验原理CCD是一种半导体光电转换器件,它是一种有独特功能的MOS(金属氧化物半导体场效应管)集成电路,CCD的突出特点是以电荷作为信号,而不同于其他大多数器件是以电流或电压为信号。
CCD器件主要由光电转换单元和电荷转移结构两部分组成,它有线阵和面阵两种结构类型,两种结构的应用都很广泛,其基本原理也是一样的,下面以线阵CCD 器件为例来说明其组成结构和工作原理。
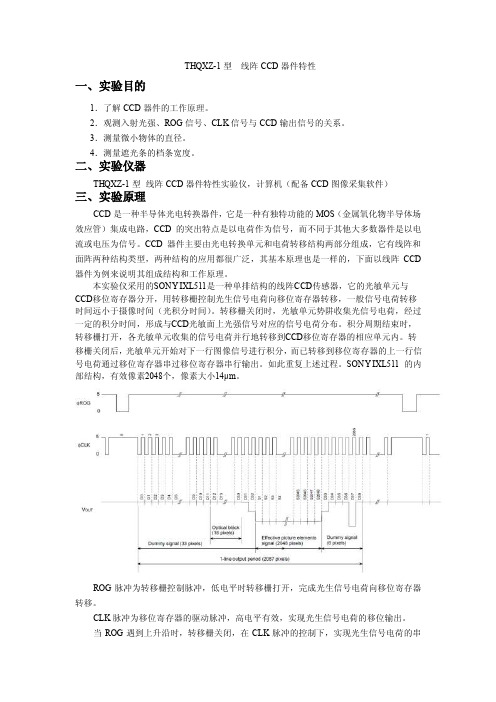
本实验仪采用的SONY IXL511是一种单排结构的线阵CCD传感器,它的光敏单元与CCD移位寄存器分开,用转移栅控制光生信号电荷向移位寄存器转移,一般信号电荷转移时间远小于摄像时间(光积分时间)。
转移栅关闭时,光敏单元势阱收集光信号电荷,经过一定的积分时间,形成与CCD光敏面上光强信号对应的信号电荷分布。
积分周期结束时,转移栅打开,各光敏单元收集的信号电荷并行地转移到CCD移位寄存器的相应单元内。
转移栅关闭后,光敏单元开始对下一行图像信号进行积分,而已转移到移位寄存器的上一行信号电荷通过移位寄存器串过移位寄存器串行输出。
如此重复上述过程。
SONY IXL511 的内部结构,有效像素2048个,像素大小14μm。
ROG脉冲为转移栅控制脉冲,低电平时转移栅打开,完成光生信号电荷向移位寄存器转移。
CLK脉冲为移位寄存器的驱动脉冲,高电平有效,实现光生信号电荷的移位输出。
当ROG遇到上升沿时,转移栅关闭,在CLK脉冲的控制下,实现光生信号电荷的串行移位输出。
在此同时,光敏单元势阱收集下一个周期的光信号电荷,因此这段时间也称为光积分时间。
光积分时间可根据光强的大小进行适当调节,以便得到清晰的图像。

CCD技术及应用实验:利用线阵CCD进行物体尺寸测量一、实验目的通过本实验掌握利用线阵CCD进行非接触测量物体尺寸的基本原理和方法,用实例探讨影响测量范围、测量精度的主要因素,为今后设计提供重要依据。
二、实验准备内容1.利用线阵CCD进行非接触测量物体尺寸的基本原理线阵CCD的输出信号包含了CCD各个像元所接收光强度的分布和像元位置的信息,使它在物体尺寸和位置检测中显示出十分重要的应用价值。
CCD输出信号的二值化处理常用于物体外形尺寸、物体位置、物体震动(振动)等的测量。
如图3-1所示为测量物体外形尺寸(例如棒材的直径D)的原理图。
将被测物体A置于成像物镜的物方视场中,将线阵CCD像敏面恰好安装在成像物镜的最佳像面位置上。
当被均匀照明的被测物体A通过成像物镜成像到CCD的像敏面上时,被测物体像黑白分明的光强分布使得相应像敏单元上存储载荷了被测物尺寸信息的电荷包,通过CCD及其驱动器将载有尺寸信息的电荷包转换为如图3-1右侧所示的时序电压信号(输出波形)。
根据输出波形,可以测得物体A 在像方的尺寸D',再根据成像物镜的物像关系,找出光学成像系统的放大倍率β,便可以用下面公式计算出物体A的实际尺寸Dβ/=(3-1)D'D显然,只要求出D',就不难测出物体A的实际尺寸D。
线阵CCD的输出信号U O随光强的变化关系为线形的,因此,可用U O模拟光强分布。
采用二值化处理方法将物体边界信息(图3-1中的N1与N2)检测出来是简单快捷的方法。
有了物体边界信息便可以进行上述测量工作。
2.二值化处理方法图3-2所示为典型CCD输出信号与二值化处理的时序图。
图中FC信号为行同步脉冲,FC的上升沿对应于CCD的第一个有效像元输出信号,其下降沿为整个输出周期的结束。
U G为绿色组分光的输出信号,它为经过反相放大后的输出电压信号。
为了提取图3-2所示U G的信号所表征的边缘信息,采用如图3-3所示的固定阈值二值化处理电路。
实验五线阵CCD特性与测量梧州学院学生实验报告专业班级:学号:姓名:成绩:实验课程实验名称实验组号:同组成员:实验地点:实验时间:指导教师:实验目的:实验仪器:一、实验原理CCD是电荷耦合器件(ChargeCoupledDevice)的简称,它是由金属氧化物半导体(简称MOS)构成的密排器件。
主要用于两个领域,一是信息存储和信息处理,二是用于摄像装置。
这里介绍摄像用的黑白两相线阵CCD。
黑白两相线阵CCD结构简述黑白两相线阵CCD有多种规格,实际上大同小异。
这里以实验所用TCD1200D型2160像素的CCD为例进行简述。
结构示意图如图1-1所示:它包括摄像机构、两个CCD模拟移位寄存器、输出机构和采样保持电路四部分。
摄像机构也称摄像区,它具有2160个光敏元和电荷转移电极组成,实际上为2160个MOS电容,电荷转移电极为MOS电容的栅极,通过电荷转移电极给栅极加脉冲电压。
光敏元起光电转换作用,MOS电容起暂存转换的电荷和向CCD模拟移位寄存器转移电荷包的作用。
将2160个MOS电容的奇数位分别与CCD转移寄存器1相连,偶数位分别与CCD转移寄存器2相连。
CCD模拟移位寄存器也是由一系列MOS电容组成。
移位寄存器1和2各密排1080个,他们对光不敏感,φ1、φ2为MOS电容的栅极,通过φ1、φ2外加脉冲电压。
图1-1CCD结构示意图电荷转移电极SH为摄像区MOS电容的控制电极,外加周期性脉冲电压。
在脉冲电压低电平期间,摄像机构中的MOS电容形成势井暂存光敏元转换的电荷,建立起一个与图像明暗成比例的电荷图像。
高电平期间,摄像区的MOS电容中的电荷同时读出到CCD模拟移位寄存器的MOS电容中,奇数位信号转移到移位寄存器1。
偶数位信号转移到移位寄存器2。
在下一个周期的低电平期间,摄像区的MOS电容摄取第二幀图像,与此同时,CCD转移寄存器的MOS电容中的电荷,在φ1、φ2、脉冲电压的作用下,两个移位寄存器中的电荷包以奇、偶序号交替的方式逐个移位到输出机构中,恢复了摄像时的次序。
第21卷 第5期2000年 应用光学 V o l.21 N o.52000文章编号:10022082(2000)05-0040-04CCD摄像机交汇测量目标脱靶量布站分析高昕,苏建刚,张光明(北京跟踪与通信技术研究所北京100094)摘 要: 分析线列CCD摄像机交汇测量的原理,以空间虚拟的光电靶代替实物靶来实现对弹丸目标脱靶量的实时获取。
在分析了CCD摄像机测角精度与布站方式等影响交汇测量精度的因素后,对光电靶面上不同位置点的CCD摄像机交汇坐标测量精度进行了计算,给出测量精度与布站的关系,指出CCD摄像机正交布站时系统具有最高的测量精度。
关键词: 线列CCD;脱靶量;交汇测量中图分类号:TB853.1-34 文献标识码:A引言由于CCD器件具有尺寸小、重量轻、功耗小、噪声低、动态范围大、线形好、光谱响应范围宽、几何结构稳定、工作可靠等优点[1],因而CCD器件在物体外型测量、表面检测、图像传真、智能传感等方面得到了广泛的应用[2]。
近些年来,CCD器件正越来越多地应用于靶场光学测量。
以CCD芯片为光敏感器件的摄像机、电视等光测设备,实现了对测量数据的实时获取。
随着CCD器件制造技术的发展,测量精度的进一步提高,在靶场光学测量中,胶片式摄影机将逐渐被以CCD芯片为光敏感器件的新型光测设备所替代。
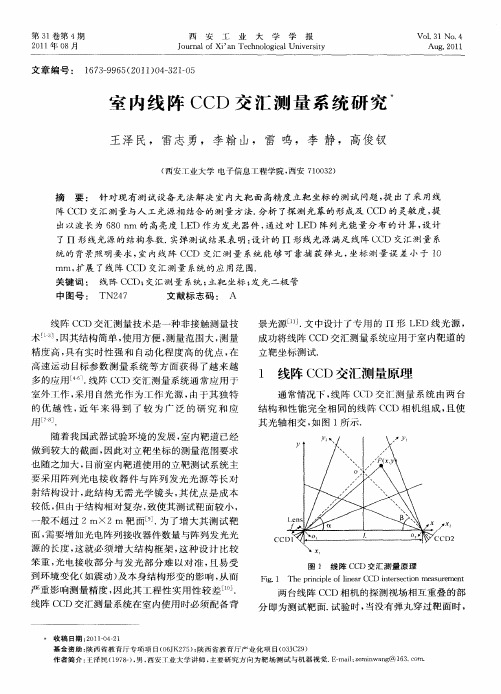
两台线列CCD摄像机视场交汇,可在空间构成一个平面共视区域。
任何通过这一区域的目标都会同时成像于两台CCD摄像机上,将采集的视频信号转换为数字信号,通过计算目标相对于CCD摄像机的高度及CCD 摄像机之间的距离,利用三角定位法,就可获得通过点的精确位置。
根据这一原理,可利用两台线列CCD摄像机视场交汇构成的“光电靶面”代替实物标靶测量弹丸的命中精度。
线列CCD摄像机“立靶”的应用为各种炮弹、火箭弹和导弹的着靶测量提供了一种实时、高精度的测量手段。
1 线列CCD摄像机对称布站测量原理如图1所示,两台线列CCD摄像机的视轴AO、BO与基线AB在同一平面内,则两台线列CCD摄像机视场可交汇出一个光电靶面,任何通过R STQ靶面的目标,都能同时成像于两台CCD摄像机上。