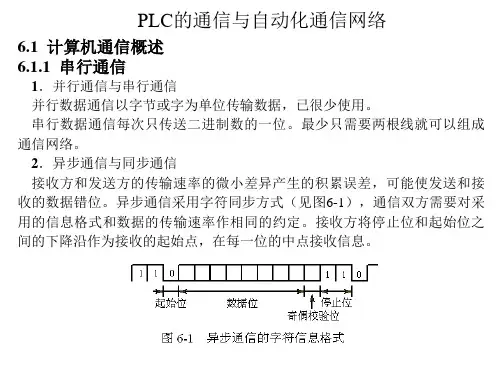
串行异步通信程序设计
- 格式:doc
- 大小:354.10 KB
- 文档页数:32
一、实验目的1. 理解串行通讯的基本原理及通信方式。
2. 掌握串行通讯的硬件设备和软件实现方法。
3. 学会使用串行通讯进行数据传输。
4. 通过实验,加深对单片机串行口工作原理和程序设计的理解。
二、实验原理串行通讯是指将数据一位一位地按顺序传送的通信方式。
与并行通讯相比,串行通讯的通信线路简单,成本低,适用于远距离通信。
串行通讯主要有两种通信方式:异步通信和同步通信。
1. 异步通信异步通信中,每个字符之间没有固定的时钟同步,而是通过起始位和停止位来标识字符的开始和结束。
每个字符由起始位、数据位、奇偶校验位和停止位组成。
2. 同步通信同步通信中,数据传输过程中有固定的时钟同步信号,发送方和接收方通过同步时钟来保证数据传输的准确性。
三、实验设备1. 单片机最小系统教学实验模块2. 数码管显示模块3. 串行数据线4. 电脑四、实验内容1. 单片机串行口初始化首先,我们需要对单片机串行口进行初始化,包括设置波特率、通信方式、数据位、停止位等。
2. 数据发送在单片机程序中,编写数据发送函数,将数据通过串行口发送出去。
3. 数据接收编写数据接收函数,从串行口接收数据。
4. 数据显示将接收到的数据通过数码管显示出来。
5. 双机通信通过两套单片机实验模块,实现双机通信。
一台单片机作为发送方,另一台单片机作为接收方。
五、实验步骤1. 将单片机最小系统教学实验模块和数码管显示模块连接到电脑上。
2. 编写单片机程序,初始化串行口,并设置波特率、通信方式、数据位、停止位等。
3. 编写数据发送函数,将数据通过串行口发送出去。
4. 编写数据接收函数,从串行口接收数据。
5. 编写数据显示函数,将接收到的数据通过数码管显示出来。
6. 编写双机通信程序,实现两台单片机之间的通信。
7. 将程序下载到单片机中,进行实验。
六、实验结果与分析1. 通过实验,成功实现了单片机串行口的初始化、数据发送、数据接收和数据显示。
2. 成功实现了双机通信,两台单片机之间可以相互发送和接收数据。
单片机单片机课程设计-双机串行通信单片机课程设计双机串行通信在当今的电子信息领域,单片机的应用无处不在。
而双机串行通信作为单片机系统中的一个重要环节,为实现设备之间的数据交换和协同工作提供了关键的技术支持。
一、双机串行通信的基本原理双机串行通信是指两个单片机之间通过串行接口进行数据传输的过程。
串行通信相较于并行通信,具有线路简单、成本低、抗干扰能力强等优点。
在串行通信中,数据是一位一位地按顺序传输的。
常见的串行通信协议有 UART(通用异步收发器)、SPI(串行外设接口)和 I2C(内部集成电路)等。
在本次课程设计中,我们主要采用 UART 协议来实现双机串行通信。
UART 协议包括起始位、数据位、奇偶校验位和停止位。
起始位用于标识数据传输的开始,通常为逻辑 0;数据位可以是 5 位、6 位、7 位或 8 位,具体取决于通信双方的约定;奇偶校验位用于检验数据传输的正确性,可选择奇校验、偶校验或无校验;停止位用于标识数据传输的结束,通常为逻辑 1。
二、硬件设计为了实现双机串行通信,我们需要搭建相应的硬件电路。
首先,每个单片机都需要有一个串行通信接口,通常可以使用单片机自带的UART 模块。
在硬件连接方面,我们将两个单片机的发送端(TXD)和接收端(RXD)交叉连接。
即单片机 A 的 TXD 连接到单片机 B 的 RXD,单片机 B 的 TXD 连接到单片机 A 的 RXD。
同时,还需要共地以保证信号的参考电平一致。
此外,为了提高通信的稳定性和可靠性,我们可以在通信线路上添加一些滤波电容和上拉电阻。
三、软件设计软件设计是实现双机串行通信的核心部分。
在本次课程设计中,我们使用 C 语言来编写单片机的程序。
对于发送方单片机,首先需要对 UART 模块进行初始化,设置波特率、数据位、奇偶校验位和停止位等参数。
然后,将要发送的数据放入发送缓冲区,并通过 UART 发送函数将数据一位一位地发送出去。
对于接收方单片机,同样需要对 UART 模块进行初始化。
《嵌入式系统原理与实验》实验指导实验三调度器设计基础一、实验目的和要求1.熟练使用Keil C51 IDE集成开发环境,熟练使用Proteus软件。
2.掌握Keil与Proteus的联调技巧。
3.掌握串行通信在单片机系统中的使用。
4.掌握调度器设计的基础知识:函数指针。
二、实验设备1.PC机一套2.Keil C51开发系统一套3.Proteus 仿真系统一套三、实验容1.甲机通过串口控制乙机LED闪烁(1)要求a.甲单片机的K1按键可通过串口分别控制乙单片机的LED1闪烁,LED2闪烁,LED1和LED2同时闪烁,关闭所有的LED。
b.两片8051的串口都工作在模式1,甲机对乙机完成以下4项控制。
i.甲机发送“A”,控制乙机LED1闪烁。
ii.甲机发送“B”,控制乙机LED2闪烁。
iii.甲机发送“C”,控制乙机LED1,LED2闪烁。
iv.甲机发送“C”,控制乙机LED1,LED2停止闪烁。
c.甲机负责发送和停止控制命令,乙机负责接收控制命令并完成控制LED的动作。
两机的程序要分别编写。
d.两个单片机都工作在串口模式1下,程序要先进行初始化,具体步骤如下:i.设置串口模式(SCON)ii.设置定时器1的工作模式(TMOD)iii.计算定时器1的初值iv.启动定时器v.如果串口工作在中断方式,还必须设置IE和ES,并编写中断服务程序。
(2)电路原理图Figure 1 甲机通过串口控制乙机LED闪烁的原理图(3)程序设计提示a.模式1下波特率由定时器控制,波特率计算公式参考:b.可以不用使用中断方式,使用查询方式实现发送与接收,通过查询TI和RI标志位完成。
2.单片机与PC串口通讯及函数指针的使用(1)要求:a.编写用单片机求取整数平方的函数。
b.单片机把计算结果向PC机发送字符串。
c.PC机接收计算结果并显示出来。
d.可以调用Keil C51 stdio.h 中的printf来实现字符串的发送。
单片机串行通信在现代电子技术的领域中,单片机串行通信扮演着至关重要的角色。
它就像是信息传递的“高速公路”,让单片机能够与外部设备或其他单片机进行高效、准确的数据交流。
串行通信,简单来说,就是数据一位一位地按顺序传输。
相较于并行通信,它所需的数据线更少,这在硬件设计上带来了极大的便利,降低了成本,也减少了布线的复杂性。
想象一下,如果每次传输数据都需要同时通过很多根线,那得是多么繁琐和容易出错!而串行通信则巧妙地解决了这个问题。
单片机串行通信有两种常见的方式:同步串行通信和异步串行通信。
异步串行通信就像是两个不太合拍的朋友在交流。
发送方和接收方各自按照自己的节奏工作,但他们通过事先约定好的一些规则来确保信息能被正确理解。
比如,规定好每个数据的位数(通常是 5 到 8 位)、起始位和停止位的形式。
起始位就像是一个打招呼的信号,告诉接收方“我要开始发数据啦”;而停止位则表示这一轮数据传输结束。
在异步通信中,双方不需要严格同步时钟,这使得它在很多应用场景中都非常灵活。
同步串行通信则更像是两个默契十足的伙伴。
发送方和接收方共用一个时钟信号,数据的传输在这个时钟的控制下有序进行。
这样可以保证数据传输的准确性和稳定性,但也对时钟的同步要求较高。
在实际应用中,单片机串行通信常用于与各种外部设备进行通信,比如传感器、显示屏、计算机等。
以传感器为例,单片机通过串行通信获取传感器采集到的温度、湿度、压力等数据,然后进行处理和控制。
为了实现串行通信,单片机通常会配备专门的串行通信接口。
比如常见的 UART(通用异步收发器)、SPI(串行外设接口)和 I2C(集成电路总线)等。
UART 是一种应用广泛的异步串行通信接口。
它的硬件实现相对简单,只需要两根数据线:发送线(TXD)和接收线(RXD)。
通过设置合适的波特率(即数据传输的速率),就可以实现单片机与其他设备之间的异步通信。
SPI 则是一种同步串行通信接口,它通常需要四根线:时钟线(SCK)、主机输出从机输入线(MOSI)、主机输入从机输出线(MISO)和片选线(CS)。
基于stm32的串口通信设计报告基于STM32的串口通信设计报告一、引言STM32微控制器因其高性能、低功耗和丰富的外设接口而广泛应用于各种嵌入式系统。
其中,串口通信(UART)是STM32中非常常用的一种通信方式,它允许微控制器与其他设备或计算机进行数据交换。
本报告将详细介绍基于STM32的串口通信设计。
二、STM32串口通信概述STM32的UART通信主要通过其通用同步/异步接收器发送器(USART)实现。
USART是一个全双工的串行通信接口,支持同步和异步两种模式。
它提供了一种可靠的通信方式,适用于低速和高速数据传输。
三、串口通信硬件设计1. 引脚配置:根据具体的STM32型号,选择适当的TXD(发送数据)、RXD(接收数据)、RTS(请求发送)和CTS(清除发送)等引脚。
2. 电源与地:为UART模块提供稳定的电源和地线。
3. 电平转换:如果微控制器与外部设备之间的电平不匹配,需要进行电平转换。
四、串口通信软件设计1. 初始化UART:在开始通信之前,需要配置UART的各种参数,如波特率、数据位、停止位和奇偶校验等。
这通常在STM32的初始化代码中完成。
2. 数据发送:通过使用HAL库或标准外设库函数,可以方便地发送数据。
一般来说,发送函数会将数据放入一个缓冲区,然后启动发送过程。
3. 数据接收:与发送类似,接收数据时,数据首先被读取到一个缓冲区中,然后可以通过中断或轮询方式进行处理。
4. 中断处理:为了提高效率,可以启用UART的中断功能。
当中断被触发时,相应的中断处理程序会被执行,用于处理接收或发送的数据。
五、示例代码与测试以下是一个简单的示例代码,展示了如何在STM32上使用HAL库进行UART通信:include "stm32f4xx_"UART_HandleTypeDef huart1;void SystemClock_Config(void);static void MX_GPIO_Init(void);static void MX_USART1_UART_Init(void);int main(void){HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();uint8_t txBuffer[] = "Hello, UART!";HAL_UART_Transmit(&huart1, txBuffer, sizeof(txBuffer), HAL_MAX_DELAY);while (1)// 循环等待,直到收到中断或手动终止程序}}```六、结论通过本报告,我们详细介绍了基于STM32的串口通信设计。
双机通信实验报告。
单片机实验报告(自动化15级)实验名称:串行通信实验1.实验1的目的。
掌握单片机串口的工作模式;2.掌握双机通信的接口电路设计和程序设计。
2.实验设备1。
个人电脑;2.单片机最小系统教学实验模块:3.数码管显示模块三、实验内容1。
两套单片机测试装置(两个实验组)共同完成了实验。
我们U1是机器A,U2是机器B。
机器A将学生的学号后的8位数字发送到机器B。
机器B接收到这8位数字,并将其显示在8位数字的电子管上。
该电路如图1所示。
串行通信模式要求为模式1,波特率为2400位/秒,不是双倍,单片机外部晶振频率为11.0592米。
图1双机通信原理附加要求示意图:机器b收到后,该机器(机器b)的学生编号的最后8位数字被送回机器a,并显示在数码管上。
2.单片机与PC机之间的通信单片机向PC机发送数据。
单片机将本机的学生号(学生本人)反复发送到PC机,发送波特率为1200,采用模式1,单片机外部晶振频率为11.0592米四、实验原理4.1串行通信模式在串行通信中,有两种基本通信模式:异步通信。
异步串行通信规定了字符数据的传输格式,即每个数据以相同的帧格式传输。
每个帧信息由起始位、数据位、奇偶校验位和停止位组成。
本实验主要研究异步通信的实现方法。
在异步通信中,每个字符使用一个起始位和一个停止位作为字符开始和结束的符号,因此占用时间。
因此,为了提高传输数据块时的通信速度,这些标记通常被去除,并采用同步通信。
同步通信不像异步通信那样依赖起始位在每个字符数据的开头发送和接收同步。
相反,同步字符用于在每个数据块传输开始时同步发送方和接收方。
根据通信方式,数据传输线可分为三种类型:单工模式、半双工模式、全双工模式。
(1)单工模式在单工模式中,通信线路的一端连接到发射机,另一端连接到接收机,这形成单向连接,并且仅允许数据在固定方向上传输。
(2)半双工模式在半双工模式下,系统中的每个通信设备由一个发射机和一个接收机组成,它们通过收发器开关连接到通信线路,如图33所示-1.实验1的目的。
单片机双机串行实验报告实验目的:通过单片机实现双机串行通信功能,掌握串行通信的原理、方法和程序设计技巧。
实验原理:双机串行通信是指通过串行口将两台单片机连接起来,实现数据的传输和互动。
常用的串行通信方式有同步串行通信和异步串行通信。
异步串行通信是指通过发送和接收数据时的起始位、停止位和校验位进行数据的传输。
而同步串行通信是指通过外部时钟信号进行数据的同步传输。
实验器材:1.两台单片机开发板(MCU7516)2.两个串口线3.两台计算机实验步骤:1.将两台单片机开发板连接起来,通过串口线连接它们的串行口。
2.在两台计算机上分别打开串口调试助手软件,将波特率设置为相同的数值(例如9600)。
3.在编程软件中,编写两个程序分别用于发送数据和接收数据。
4.在发送数据的程序中,首先要设置串口的波特率、数据位、停止位和校验位,并将数据存储在缓冲区中。
然后利用串口发送数据的指令将数据发送出去。
5.在接收数据的程序中,同样要设置串口的参数。
然后使用串口接收数据的指令将接收到的数据存储在缓冲区中,并将其打印出来。
实验结果与分析:经过实验,我们成功地实现了单片机之间的双机串行通信。
发送数据的单片机将数据发送出去后,接收数据的单片机能够正确地接收到数据,并将其打印出来。
实验中需要注意的是,串口的波特率、数据位、停止位和校验位必须设置为相同的数值。
否则,发送数据的单片机和接收数据的单片机无法正常进行通信。
同时,在实验之前,需要了解单片机开发板支持的串口通信相关的指令和函数。
实验总结:通过本次实验,我们深入了解了单片机之间的双机串行通信原理和方法。
掌握了串口的设置和使用方法,以及相关的指令和函数。
在实验中,我们学会了如何通过串行口实现数据的传输和互动,为今后的单片机应用和开发打下了基础。
同时,我们还发现,双机串行通信在实际应用中有着广泛的用途。
例如,可以通过串行通信实现两台计算机之间的数据传输,或者实现单片机与计算机之间的数据收发。
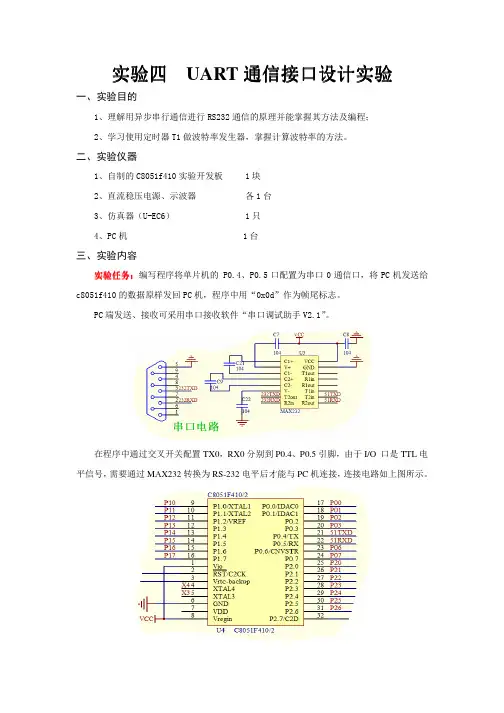
实验四 串行通信实验一、实验目的1.了解51单片机串行口的结构、串行通讯的原理。
2.掌握51单片机与PC 机之间通讯的方法。
3. 学习系统应用程序的设计和调试二、实验设备PC 机一台 、 实验教学板一块。
三、实验原理51单片机的串行接口是全双工的,它能做异步接收器/发送器(UART ),也能做同步移位寄存器使用。
在做UART 使用时,相关的寄存器有SBUF 、SCON 、和PCON 中的波特率倍增位SMOD 。
SBUF 是数据发送缓冲器和接收缓冲器,逻辑上用同一个地址,物理上是分开的,用读写操作来选择。
SCON 是串行口控制寄存器,用于设定串行口的工作方式;保存方式2和方式3的第9位数据;存放发送、接收的中断标志。
在串行通讯的方式1和方式3中,通信的波特率是可以设置的,满足下式:2/132SMOD=⨯波特率(定时器计数器的溢出率)PC 机的串行通讯口是借助通用异步接收发送器8250(或16C550等)实现的,可使用comdebug.exe 等提供了有关串行口的收、发操作窗口的软件实现通讯。
PC 机的串行通讯采用RS232电平,因此要求单片机的实验板也要配置RS232接口,解决逻辑电平的配接。
如果通讯距离较远,则要配接调制解调器。
四、实验内容1, 自发自收用一根短路线,将实验板中RS232插口的RXD 和TXD 两个插孔短路。
然后编程设定串行口为工作方式1,传送55H 和0AAH 两个数据。
实验要求:程序采用查询方式。
每传送、接收一个数据,做一次检查,看是否正确,若两次都正确,则在显示器上显示“GOOD”,若不正确,则不显示,并要重新传送。
2, 单片机与PC 机的通信先使用通讯电缆将单片机的RS232接口与PC 机的COM1口连接,PC 机起动并运行comdebug.exe 软件,窗口上设置波特率为1200,8位数据、一个停止位。
单片机端也采用工作方式1,波特率为1200,完成单片机与PC 机的通信。
单片机双机之间的串行通信设计1.引言单片机双机之间的串行通信是指两个或多个单片机之间通过串口进行数据传输和通信的过程。
串行通信是一种逐位传输数据的方式,与并行通信相比,它占用的硬件资源更少,且传输距离较远。
本文将介绍单片机双机之间串行通信的设计过程,包括硬件设计和软件编程。
2.硬件设计串行通信需要使用到两个主要的硬件部件:串口芯片和通信线路。
串口芯片负责将要发送或接收的数据转换成串行数据流,并通过通信线路进行传输。
通信线路通常包括两根传输数据的线路(TX和RX)、地线和时钟线。
2.1串口芯片的选择常用的串口芯片有MAX232、MAX485、CH340等。
选择合适的芯片需要考虑通信距离、通信速率、系统的功耗等因素。
对于较短的通信距离和较低的通信速率,可以选择MAX232芯片;而对于长距离通信和较高的通信速率,可以选择MAX485芯片。
2.2通信线路设计通信线路的设计需要考虑信号的传输质量和抗干扰能力。
通常使用双绞线或者屏蔽线路来减小信号的串扰和干扰。
对于短距离通信,双绞线即可满足需求;而对于长距离通信,需要采用屏蔽线路来减小串扰和干扰。
3.软件设计串行通信的软件设计主要包括通信协议的制定和数据包的格式规定。
3.1通信协议的选择通信协议是指数据传输的一套规则和约定,它规定了数据的格式、传输顺序、误码校验等内容。
常用的通信协议有UART、RS232、SPI、I2C等。
UART是最常用的通信协议,它一般使用异步通信方式,并具有较高的通信速率和稳定性。
3.2数据包的格式规定数据包是一组有意义的数据的集合,它包括起始位、数据位、停止位和校验位等。
起始位用于标识一个数据包的开始,通常为逻辑低电平;数据位用于存储要传输的数据;停止位用于标识数据包的结束,通常为逻辑高电平;校验位用于检测数据传输过程中是否发生错误。
校验位可以是奇校验、偶校验、无校验等。
4.实验步骤4.1连接硬件根据硬件设计部分的要求,将串口芯片和通信线路连接到单片机上。
单片机双机串行实验报告实验报告:单片机双机串行通信实验一、实验目的本实验旨在通过单片机实现双机间的串行通信,包括数据的发送和接收,并利用这种通信方式完成一定的任务。
二、实验原理1.串行通信:串行通信是将数据一个个位发送或接收的方式。
数据通过一个线路逐位发送或接收,可以减少通信所需的线路数目。
2. UART串口通信:UART是通用异步收发传输器(Universal Asynchronous Receiver/Transmitter)的简称,是一种最常用的串口通信方式,通常用于单片机与计算机、单片机与单片机之间的通信。
3.串口模块:串口模块是负责将数据转变为串行传输的硬件模块,包括发送端和接收端。
通过设置波特率、数据位、校验位和停止位等参数,可以实现数据的可靠传输。
4.单片机串口通信:单片机内部集成了UART串口通信接口,只需要通过相应的寄存器配置,可以实现串口通信功能。
5.双机串行通信:双机串行通信是通过串口将两台单片机进行连接,一台单片机作为发送端,负责将数据发送出去;另一台单片机作为接收端,负责接收并处理发送的数据。
三、实验器材与软件1.实验器材:两台单片机、USB转TTL模块、杜邦线若干。
2. 实验软件:Keil C51集成开发环境。
四、实验内容与步骤1.配置发送端单片机(1)连接单片机和USB转TTL模块,将USB转TTL模块的TXD端连接到单片机的P3口,将GND端连接到单片机的地线。
(2)在Keil C51环境下创建新工程,编写发送端程序。
(3)配置串口通信的波特率、数据位、校验位和停止位,并打开串口发送中断。
(4)循环发送指定的数据。
2.配置接收端单片机(1)连接单片机和USB转TTL模块,将USB转TTL模块的RXD端连接到单片机的P3口,将GND端连接到单片机的地线。
(2)在Keil C51环境下创建新工程,编写接收端程序。
(3)配置串口通信的波特率、数据位、校验位和停止位,并打开串口接收中断。
双机串行通信的设计与实现一、设计要求1.单机自发自收串行通信。
接收键入字符,从8251A的发送端发送,与同一个8251A的接收端接收,然后在屏幕上显示出来。
2.双机串行通信,在一台PC机键入字符,从8251A的发送端发送给另一台PC机,另一台PC机的8251A的接收端接收,然后在屏幕上显示出来。
二、所用设备IBM-PC机两台(串行通信接口8251A两片,串行发送器MC1488和串行接收器MC1489各两片,定时器/计数器8253,终端控制器8259等),串口线一根串行直连电缆用于两台台电脑通过串行口直接相连,电缆两端的插头都是9 针的母插头:三、硬件方案1.设计思想计算机传输数据有并行和串行两种模式。
在并行数据传输方式中,使用8条或更多的导线来传送数据,虽然并行传送方式的速度很快,但由于信号的衰减或失真等原因,并行传输的距离不能太长,在串行通信方式中,通信接口每次由CPU得到8位的数据,然后串行的通过一条线路,每次发送一位将该数据放送出去。
串行通信采用两种方式:同步方式和异步方式。
同步传输数据时,一次传送一个字节,而异步传输数据是一次传送一个数据块。
串口是计算机上一种非常通用设备串行通信的协议。
大多数计算机包含两个基于RS232的串口。
串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
典型地,串口用于ASCII码字符的传输。
通信使用3根线完成:(1)地线,(2)发送,(3)接收。
由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。
其他线用于握手,但是不是必须的。
串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。
对于两个进行通行的端口,这些参数必须匹配:RS-232(ANSI/EIA-232标准)是IBM-PC及其兼容机上的串行连接标准。
可用于许多用途,比如连接鼠标、打印机或者Modem,同时也可以接工业仪器仪表。
51单片机与PC串口间通讯设计与分析一、串口通讯原理串口通讯是指通过串口来进行数据的收发传输的一种通讯方式。
串口通讯分为同步串行通讯和异步串行通讯两种方式,而51单片机与PC之间的串口通讯采用的是异步串行通讯方式。
异步串行通信是指每个数据字节之间可以有可变长度的停止位和起始位。
串口通讯一般由以下几个部分组成:1.传输数据线:用于传输数据的信号线,包括发送数据线(TXD)和接收数据线(RXD)。
2.时钟线:用于提供通讯双方的时钟信号。
3.控制线:用于控制串口通讯的流程,包括数据准备好(DSR)、数据就绪(DTR)等。
二、串口通讯协议串口通讯协议是约定通讯双方数据传输的格式和规则,常见的串口通讯协议有RS-232、RS-485等。
在51单片机与PC之间的串口通讯中,一般使用的是RS-232协议。
RS-232协议规定了数据的起始位、数据位数、校验位和停止位等。
起始位用于标识数据的传输开始,通常为一个逻辑低电平;数据位数指定了每个数据字节的位数,常见的值有5位、6位、7位和8位等;校验位用于校验数据的正确性,一般有无校验、奇校验和偶校验等选项;停止位用于表示数据的传输结束,通常为一个逻辑高电平。
三、51单片机串口的程序设计#include <reg52.h>#define UART_BAUDRATE 9600 // 波特率设置#define UART_DIV 256- UART_BAUDRATE/300void UART_Init( //串口初始化TMOD=0x20;SCON=0x50;PCON=0x00;TH1=UART_DIV;TL1=UART_DIV;TR1=1;EA=1;ES=1;void UART_SendByte(unsigned char ch) //串口发送字节TI=0;SBUF = ch;while(TI == 0);TI=0;void UART_Interrupt( interrupt 4 //串口中断处理if(RI)unsigned char ch;ch = SBUF;RI=0;//处理接收到的数据}if(TI)TI=0;//发送下一个字节}void mainUART_Init(;while(1)//主循环}在上述程序中,首先通过UART_Init(函数进行串口初始化,其中设置了波特率为9600;然后使用UART_SendByte(函数发送数据,调用该函数时会把数据放入SBUF寄存器,并等待TI标志位变为1;最后,在UART_Interrupt(函数中,使用RI标志位判断是否收到数据,然后对数据进行处理,TI标志位判断是否发送完当前字节。
单片机 modbus rtu程序单片机(Microcontroller)是一种集成电路芯片,它集成了处理器核心、存储器、输入输出接口等功能模块。
而Modbus RTU是一种常用的串行通信协议,广泛应用于工业自动化领域中的数据采集与控制系统。
本文将介绍单片机中如何实现Modbus RTU通信协议的程序设计。
我们需要了解Modbus RTU通信协议的基本原理和工作方式。
Modbus RTU采用串行通信方式,通信数据以二进制形式传输。
它的通信格式包括起始位、数据位、校验位和停止位。
在Modbus RTU通信中,主站负责发送请求,从站负责响应请求并返回数据。
为了实现Modbus RTU通信协议,我们需要在单片机中编写相应的程序。
首先,我们需要配置单片机的串口通信参数,包括波特率、数据位、校验位和停止位等。
然后,我们需要定义Modbus RTU 协议中的数据帧结构,包括从站地址、功能码、数据域和校验码等。
在程序设计中,我们需要实现Modbus RTU通信协议的主站和从站功能。
主站负责发送请求帧,从站负责解析请求帧并返回响应帧。
主站发送请求帧时,需要指定从站地址、功能码和数据域等信息。
从站接收到请求帧后,根据功能码和数据域进行相应的处理,并返回响应帧。
在实际应用中,我们可以根据需要编写不同的功能模块。
例如,可以编写读取传感器数据的功能模块,根据请求帧中的功能码和数据域,读取相应的传感器数据,并将数据返回给主站。
另外,还可以编写控制执行器的功能模块,根据请求帧中的功能码和数据域,控制执行器的运动或状态。
除了基本的Modbus RTU通信功能,我们还可以通过单片机的其他功能模块,如定时器、中断等,实现更复杂的功能。
例如,可以通过定时器功能实现周期性发送请求帧,实现实时监测和控制。
另外,还可以通过中断功能实现异步通信,提高通信效率和可靠性。
单片机的Modbus RTU程序设计是一项复杂而重要的工作。
通过合理设计和编写程序,可以实现单片机与其他设备之间的数据交换和控制操作,实现工业自动化系统的高效运行。
实验七、UART串行数据通信实验1(查询与中断方式)一、实验目的通过实验,掌握UART查询与中断方式的程序的设计。
二、实验设备●硬件:PC 机一台●LPC2131教学实验开发平台一套●软件:Windows98/XP/2000 系统,ADS 1.2 集成开发环境。
●EasyARM工具软件。
三、实验原理EasyARM2131 开发板上,UART0 的电路图如图8.1 所示,当跳线JP6 分别选择TxD0和RxD0 端时方可进行UART0 通讯实验。
图8.1 UART0 电路原理图四、实验内容实验内容1使用查询方式,通过串口0 接收上位机发送的字符串如“Hello EasyARM2131!”,然后送回上位机显示,主程序以及各子程序流程如图8.2 所示。
(改写发送内容,字符个数不同)。
说明:需要上位机(PC机)串口终端如EasyARM.exe 软件。
使用串口延长线把LPC2131教学实验开发平台的CZ2(UART0)与PC机的COM1 连接。
PC 机运行EasyARM 软件,设置串口为COM1,波特率为115200,然后选择【设置】->【发送数据】,在弹出的发送数据窗口中点击“高级”即可打开接收窗口。
图8.2 串口实验相关程序流程图1.实验预习要求①研读LPC2000 UART工作原理与控制章节,注意FIFO 接收情况的特性。
②了解LPC2131教学实验开发平台的硬件结构,注意串口部分的电路。
2.实验步骤①启动ADS 1.2,使用ARM Executable Image for lpc2131工程模板建立一个工程DataRet_C。
②在user 组中的main.c 中编写主程序代码,在项目中的config.h 文件中加入#include <stdio.h>。
③选用DebugInFlash生成目标,然后编译连接工程。
④将EasyARM2131开发板上的JP6跳线分别选择TxD0和RxD0端时,方可进行UART0通信实验。
*******************实践教学*******************兰州理工大学计算机与通信学院2014年秋季学期《通信系统综合训练》课程设计题目:串行异步通信程序设计专业班级:通信工程(1)班姓名:李银环学号:11250134指导教师:王惠琴成绩:摘要在Windows环境下实现通信的方法主要有利用MSComm控件和直接用Windows API编程,软件采用Microsoft Visual C++ 6.0,利用MSComm控件编程相对来说更简单一些,而直接使用Windows API编程更灵活一些。
本次课程设计分析了串行异步通信的基本原理,在VC++6.0的环境下利用MSComm控件实现了两个PC机的COM口间的数据发送和接收。
本文通过对COM1口进行初始化编程,以及对建立的工程中的每个对话框和按钮分别进行编程和设置,成功的实现了利用PC机的两个COM口进行异步通信,并能根据设置调整异步传行通信参数。
关键词:VC++6.0;MSComm控件;串行异步通信目录前言 (1)第1章串行异步通信基本原理 (2)1.1 串行通信协议 (2)1.2 串口通信的基本概念 (3)1.3 RS-232简介 (4)第2章 VC++软件简介 (5)2.1 VC++6.0简介 (5)2.2 Microsoft Communications Control 控件 (6)第3章串行异步通信系统分析 (7)第4章串行异步通信系统设计 (8)4.1建立工程 (8)4.2 在程序中添加MSComm控件 (9)4.3 初始化串口:设置MSComm控件的属性 (11)4.4 发送数据 (12)第5章串行异步通信程序调试 (18)5.1 计算机串口设置 (18)5.2 程序运行结果 (18)参考文献 (20)附录 (21)致谢 (29)前言随着现代信息技术的发展以及计算机网络的广泛应用,计算机通信技术已经日趋成熟,串口通信作为一种灵活、方便、可靠的通信方式,被广泛应用于工业控制中。
同时串行通信还应用于交通控制、分布数据采集系统、通信距离扩展、电力系统数据采集与控制系统、高速公路收费系统、远程控制、保密通信系统和教学实验等等。
在数据通信、计算机网络以及工业上的分布式控制系统中,经常需要采用串行通信来达到远程信息交换的目的。
当控制计算机与各数控机床相距较远时,一般采用串行通信方式而不采用并行通信方式。
这是因为并行通信系统的造价较高、众多的连线不仅容易引入干扰,也容易发生线路故障。
串行通信由于接线少、成本低,在数据采集和控制系统中得到了广泛的应用,控制系统中常用的串行通信一般采用RS-232串行总线标准,RS-232是PC机与通信工业中应用最广泛的一种串行接口。
WINDOWS下双机点到点的串行通信系统是一个典型的通信系统,它是我们为了实现计算机底层的工作,以及为了用户更好地和系统能够直接相连而提出来的。
经过分析我使用了RS-232C为接口线路以及Microsoft公司的Visual C++ 6.0作为开发工具,利用其提供的各种面向对象的开发工具来开发的系统。
论述了采用自顶向下的设计方法,模块化设计思路,以及总体设计编码和调试,其开发主要包括数据的发送与接收等方面。
在本次课程设计中,讨论了使用VC++的开发环境实现两台PC机间的串口通信。
就是通过一个MSComm控件,用一个RS-232串口线将两台机子间的串口连接起来,从而进行数据收发。
而使用WinAPI进行串口通信不像使用MSComm控件那么容易,需要设置多个参数。
第1章串行异步通信基本原理1.1 串行通信协议串行传输可采用以下两种方法:异步传输和同步传输。
1.1.1 异步传输协议在异步传输方式中,数据传输单位是字符。
在通信的数据流中,字符间异步,字符内部各位间同步。
异步通信方式的“异步”主要体现在字符与字符之间通信没有严格的定时要求。
异步传输中,字符可以是连续地、一个个地发送,也可以是不连续地、随机地进行单独发送。
在一个字符格式的停止位之后,立即发送下一个字符的起始位,开始一个新的字符的传输,这叫做连续的串行数据发送,即帧与帧之间是连续的。
断续的串行数据传送是指在一帧结束之后维持数据线的“空闲”状态,新的起始位可在任何时刻开始。
一旦传送开始,组成这个字符的各个数据位将被连续发送,并且每个数据位持续的时间是相等的。
接收端根据这个特点与数据发送端保持同步,从而正确地恢复数据。
收/发双方则以预先约定的传输速率,在时钟的作用下,传送这个字符中的每一位。
起止式异步协议的特点是一个字符一个字符传输,并且传送一个字符总是以起始位开始,以停止位结束,字符之间没有固定的时间间隔要求。
每一个字符的前面都有一位起始位(低电平,逻辑值0),字符本身有5~7位数据位组成,接着字符后面是一位校验位(也可以没有校验位),最后是一位,或意味半,或二位停止位,停止位后面是不定长度的空闲位。
停止位和空闲位都规定为高电平(逻辑值),这样就保证起始位开始处一定有一个下跳沿。
异步串行通信的可靠性高,但由于要在每个字符的前后加上起始位和停止位这样一些附加位,使得传输效率变低了,只有约80%。
因此,起止协议一般用在数据速率较慢的场合(小于19.2kbit/s)。
在高速传送时,一般要采用同步协议。
1.1.2 同步传输协议在同步传输方式中,以帧为数据传输单位,每个帧中含有多个字符代码,而且字符代码与字符代码之间没有间隙以及起始位和停止位。
和异步传输相比,数据传输单位的加长容易引起时钟漂移。
为了保证接收端能够正确地区分数据流中的每个数据位,收发双方必须通过某种方法建立起同步的时钟。
可以在发送器和接收器之间提供一条独立的时钟线路,由线路的一端(发送器或者接收器)定期地在每个比特时间中向线路发送一个短脉冲信号,另一端则将这些有规律的脉冲作为时钟。
这种技术在短距离传输时表现良好,但在长距离传输中,定时脉冲可能会和信息信号一样受到破坏,从而出现定时误差。
另一种方法是通过采用嵌有时钟信息的数据编码位向接收端提供同步信息。
(1)面向字符的同步协议这种协议的特点是一次传送由若干个字符组成的数据块,而不是只传送一个字符,并规定了10个字符作为这个数据块的开头与结束标志以及整个传输过程的控制信息,它们也叫做通信控制字。
由于被传送的数据块是由字符组成,故被称作面向字符的协议。
(2)面向比特的同步协议该协议的特点是所传输的一帧数据可以是任意位,而且它是靠约定的位组合模式,而不是靠特定字符来标志帧的开始和结束,故称“面向比特”的协议。
1.2 串口通信的基本概念1.2.1 串行通信串行通信数据传送的特点是:数据传送按位顺序进行,最少只需要一根传输线即可完成,节省传输线。
与并行通信相比,串行通信还有较为显著的优点:传输距离长,可以从几米到几千米;在长距离内串行数据传送速率会比并行数据传送速率快;串行通信的通信时钟频率容易提高;串行通信的抗干扰能力十分强,其信号间的互相干扰完全可以忽略。
但是串行通信传送速度比并行通信慢得多,并行通信时间为T,则串行时间为NT。
1.2.2 串行通信的工作模式串行数据通信的基础是单线传输信息,数据通常是在两个站(点对点)之间进行传送,按照数据流的方向可分成3种传送模式:单工形式、半双工形式和全双工形式。
(1)单工形式:在单工形式中数据传送是单向的。
通信双方中,一方固定为发送端,另一方则固定为接收端。
信息只能沿一个方向传送,使用一根传输线,例如,计算机与打印机之间的通信是单工形式,因为只有计算机向打印机传送数据,而没有相反的数据传送。
还有在某些通信信道中,如单工无线发送等。
(2)半双工形式:半双工通信使用同一根传输线,既可发送数据又可接收数据,但不能同时发送和接收。
在任何时刻只能由其中的一方发送数据,另一方接收数据。
因此半双工形式既可以使用一条数据线,也可以使用两条数据线。
半双工通信中每端需有一个收/发切换电子开关,通过切换来决定数据向哪个方向传输。
因为有切换,所以会产生时间延迟。
但是对于像打印机这样单方向传输的外围设备,用半双工方式就能满足要求了,不必采用全双工方式,可节省一根传输线。
(3)全双工形式:全双工数据通信分别由两根可以在两个不同的站点同时发送和接收的传输线进行传送,通信双方都能在同一时刻进行发送和接收操作,在全双工方式中,每一端都有发送器和接收器,有两条传送线,可在交互式应用和远程监控系统中使用,信息传输效率较高。
1.3 RS-232简介在串行通讯时,要求通讯双方都采用一个标准接口,使不同的设备可以方便地连接起来进行通讯.本次课程设计采用RS-232接口。
RS-232-C接口(又称EIA RS-232-C)是目前最常用的一种串行通讯接口. ("RS-232-C"中的"-C"只不过表示RS-232的版本,所以与"RS-232"简称是一样的)它是在1970年由美国电子工业协会(EIA)联合贝尔系统,调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准.它的全名是"数据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换接口技术标准"该标准规定采用一个25个脚的DB-25连接器,对连接器的每个引脚的信号内容加以规定,还对各种信号的电平加以规定.后来IBM的PC机将RS232简化成了DB-9连接器,从而成为事实标准.而工业控制的RS-232口一般只使用RXD,TXD,GND三条线.它适合于数据传输速率在0~20000b/s范围内的通信。
这个标准对串行通信接口的有关问题,如信号线功能、电器特性都作了明确规定。
在TxD和RxD上:逻辑1(MARK)=-3V~-15V,逻辑0(SPACE)=+3~+15V,在RTS、CTS、DSR、DTR和DCD等控制线上:信号有效(接通,ON状态,正电压)=+3V~+15V信号无效(断开,OFF状态,负电压)=-3V~-15RS232的逻辑电平与TTL以高低电平表示逻辑状态的规定不同。
因此,为了能够同计算机接口或终端的TTL器件连接,必须在EIA-RS-232C与TTL电路之间进行电平和逻辑关系的变换。
实现这种变换的方法可用分立元件,也可用集成电路芯片。
目前较为广泛地使用集成电路转换器件,如MC1488、SN75150芯片可完成TTL电平到EIA电平的转换,而MC1489、SN75154可实现EIA电平到TTL电平的转换。
MAX232芯片可完成TTL←→EIA双向电平转换。
第2章 VC++软件简介2.1 VC++6.0简介VC++6.0是Microsoft公司推出的一个基于Windows系统平台、可视化的集成开发环境,它的源程序按C++语言的要求编写,并且加入了微软提供的功能强大的MFC(Microsoft Foundation Class)类库。