ABB点焊机器人工作站介绍
- 格式:pdf
- 大小:248.27 KB
- 文档页数:2
焊接机器人工作站简介首钢莫托曼机器人有限公司(SGM)是专门从事工业机器人及其自动化生产线设计、制造及销售的中日合资公司。
公司成立于1996年8月23日,注册资金700万美元,由首钢总公司(45%)、日本株式会社安川电机(43%)和日本岩谷产业株式会社(12%)共同投资,总部位于北京经济技术开发区。
SGM主营日本安川MOTOMAN系列机器人产品,广泛应用于弧焊、点焊、涂胶、切割、搬运、码垛、喷漆、科研及教学。
安川新推出的洁净机器人和双臂机器人是MOTOMAN机器人的开拓性产品,SGM今后会不断推出更多高性能、高精度、高可靠性的新型MOTOMAN机器人。
SGM的产品遍布汽车、摩托车、家电、烟草、陶瓷、工程机械、矿山机械、物流、铁路机车等诸多行业。
为促进企业发展、提升行业知名度,SGM每年都会参展多个大型行业应用展会,SGM拥有一批优秀的工程设计、项目调试人员,在机器人工作站及各种大中型机器人自动化系统生产线的研发、制造、调试及运行维护等方面具有成熟经验和较高水平,在应用技术上获得了多项国家专利。
SGM在不断发展壮大的过程中不断提高系统设计的精准性,这大大提高了系统设备的使用可靠性。
机器人本体专门为点焊而设计,其上臂内藏点焊用的电缆,气管与水管,它与高性能NX100控制柜及配备6.5”LCD彩色显示触摸屏的示教盒的结合,使MOTOMAN-ES系列机器人极大程度地完善了点焊系统。
NX100可同时协调控制多达36个轴,可以实现机器人6轴+电动点焊钳1轴+行走轴1轴,可四台点焊机器人单元的同时协调动作。
并且,由于控制柜命令的运行数度提高1倍从而缩短了作业周期。
有负载重量为165KG到200KG达到了机械人精度运动的最大承重量。
机器人运用高精度控制算法缩短了命令响应的滞后时间,它是安川独有的“高级机器人动作(ARM)”控制特点之一。
因此,机器人的诡计重复精度可以提高50%。
误差补偿功能(选项)使机器人绝对位置精度提高2到5倍。


ABB机器人配置伺服点焊焊枪教程“非常实用详细的ABB机器人配置外部轴,伺服点焊焊枪的教程。
必须收藏”01—导入伺服电机的MOC1、选择配置—motion—文件—加载参数:2、选择加载参数并替换副本,点击加载,路径选择USB,找到需要加载的MOC.cfg文件(ABB软件RobotStudio可以获取到外部轴的MOC模板):3、注意moc文件分直驱与皮带两种:4、确定之后重启(重启完成之后示教器右上角会出现齿轮状图标);02—焊枪校准1、微校找零(将焊枪动臂与静臂贴合,进行微校操作)03—做commutation运转1、调用例行程序Commutation并转到例行程序:2、电机上电并执行例行程序:选择OK:根据写屏提示选择正确的选项(此处不一一截图):点击确定,执行完毕.04—焊枪最大开口与最小开口值,计算传动比1、焊枪开口范围(此时先不重启系统):2、计算焊枪伺服电机传动比:通过卡尺,计算器计算出传动比,并将其值填入如图所示的为之中;转动比=显示值/实际测量值*默认值(此时先不重启系统);3、SyncCheckoff设为YES,(确定之后重启):05—调用服务例行程序ManAddGunName调用服务例行程序ManAddGunName,如果没有则运行例行程序ManGunSearch:上电并执行服务例行程序:1、选择Select:2、填入1,确定:3、选择OK:4、选择YES:06—焊枪初始化调用服务例行程序ManServiceCalib(选择2)07—计算最大扭矩新建如下例行程序,更改force值,此时force值中的压力应填写扭矩;如果焊枪说明书中給的最大压力为4000N,将force中的压力值(实际为扭矩值)改为4,时间3秒,板厚为压力计厚度,单步运行SetForce指令,如果打出的压力为3000N,则继续加大force中的压力值(实际为扭矩值),如4.2,直到打出的最大压力为4000N时,记录当前扭矩值(假设打出最大压力4000N时,对应的扭矩为5.2)08—更改配置中的参数1、将得出的扭矩值5.2 填入示教器中(此时先不重启系统):2、更改ramptime值为0.07(此时先不重启系统):3、设置No.ofSpeedLimit2中T orque2与SpeedLimit2中的值:Torque2改为7.2(此时先不重启系统)SpeedLimit2 改为30(此时先不重启系统)4、填写maxforecontrol motor torque值,一般大0.1,5.2 填写5.3:(此时先不重启系统)5、torque absolute max(完成后重启);09—压力标定1、选择焊枪压力校准,上电并执行程序;(注意在压力标定过程中机器人要一直保持上电状态):2、选择1 更改参数:选择1234更改对应的参数,更改完成之后选择back返回:3、选择2进行压力标定,出现如下界面,将压力传感器计放在静电极臂上,注意摆放正确,传感器与静电极臂垂直,点击确定:4、读取压力值,如果压力计显示值不稳定,则点击Retry重新加压;如果压力计显示值稳定则点击确定:5、将读取到的压力值填入示教器(如620N),点击确定:6、按以上方法依次将压力值填入示教器中(此处省去中间部分),第五次加压之后出现如下界面,点击OK:点击NEXT:点击OK:点击OK,如果点击OK之后出现Restart选项,则点击Restart重启,不出现则手动重启,(此时电机下电).10—压力测试1、待重启完成之后将扭矩值改为压力,完成后重启机器人:2、重启完成之后运行SetForce指令,设4-6个不同值测其准确度,接受范围在+/-80N:11—更改参数1、在配置—motion—SGProcess—S_GUN设置最大/最小压力(完成后先不重启):2、更改同步(完成后先不重启):3:更改焊枪加速度(完成后先不重启):12—更改Collision DeltaPosition值运行Setforce指令,将压力设为最大,板厚改为0,保持时间设为十秒,在焊枪关闭时观察手动操作界面中外部轴数值,将其绝对值填入下面的位置中(完成后重启系统):2、更改电极帽补偿百分比:13—焊枪补偿基准设定1、运行以下指令:2、完成之后将其数值做对比,如果数值一样,则配枪成功。
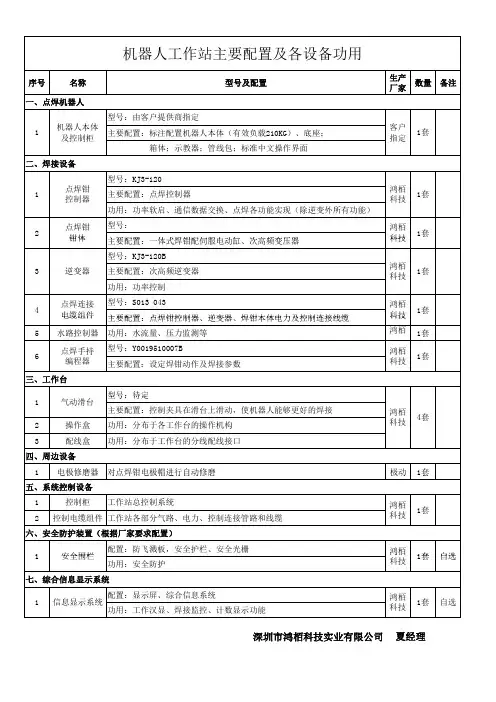
每个工作站的主要配置,工作原理,保养方法,注意事项每个工作站的主要配置:机器人、焊接电源、水箱、焊枪、结构件、气动元件、电器元件。
一.机器人与控制柜1.机器人控制柜和机器人本体工作原理:机器人控制柜由电源装置、用户接口电路、动作电路、存储电路、I/O电路等构成。
机器人是由伺服电机驱动的轴和腕构成的机构部件,手腕叫做机臂,手腕的结合部轴杆或关节。
2.保养方法:(1),对轴电机要加油的地方,需经常检查,发先油少时进行加油。
(2),在机器人工作一定时间后,需对机器人各个电路板接口重新插拔。
(3),要是机器人工作环境差的话,需定期对控制柜和机器人表面进行清洁保养。
(4),定期对机器人做备份,并下载在上位机上或笔记本上以防机器人系统程序丢失时无法恢复。
(5),定期对机器人机械部件进行一个全面检查。
3.注意事项:(1),由于机器人系统复杂,而且危险性大,操作人员必须接受培训,结业后方可上岗操作(2),操纵者必须正确穿戴劳动保护用品。
请不要带者手套操作示教盘和操作盘。
确认安全后,方可运行机器人。
(3),开机时,先开总电源,在开控制柜电源。
关机时,先关控制柜电源,最后关总电源。
下班后,整理好6S。
二.焊接电源1.焊接电源的工作原理:是用380V的工业电通过焊机里的减压器降低了电压,增强了电流,利用电能产生的巨大热量融化钢铁,焊丝的融入使钢铁之间的融合性增高。
2.保养方法:电焊机应放在干燥通风处;使用完毕后,用帆布罩好,防止灰尘或雨水浸入电焊机内部,做到经常吹扫;移动电焊机时,避免剧烈震动;经常给调节电流机构加注润滑油;经常检查电焊机的线圈、连接线、一次二次接线板是否损坏和碳化,并及时处理。
3.注意事项:(1),应根据工件技术条件,选用合理的焊接工艺(焊条、焊接电流和暂载率),不允许超负载使用,并应尽量采用无载停电装置。
不准采用大电流施焊,不准用电焊机进行金属切割作业(2),焊机的工作场地应保持干燥,通风良好。
移动电焊机时,应切断电源,不得用拖拉电缆的方法移动焊机,如焊接中突然断电,应切断电源。
项目一工业机器人工作站简介本项目分为2个任务:任务1:认识ABB工业机器人任务2:启停ABB工业机器人工作站一、任务描述在了解ABB工业机器人工作站基本构成的基础上,按照步骤正确地进行工作站的开关机的操作。
本书所介绍的工作台采用型号为ABB IRB120的六自由度工业机器人(以下简称IRB120机器人),与其配套的机器人控制器型号为IRC5。
本任务每四位同学一组,按照企业岗位操作规范,知道ABB IRB120工业机器人的特点及主要参数、ABB机器人工作站的功能、熟悉ABB机器人开关机流程,最后能正确启停ABB机器人。
二、学习目标完成本实训任务后,你应能够:1.知道ABB IRB120工业机器人的特点2.知道ABB机器人工作站的功能3.知道ABB机器人开关机流程4.能正确启停ABB机器人。
三、学习准备(1)ABB IRB120概述①本书所介绍的工作台采用型号为ABB IRB120的六轴工业机器人(以下简称IRB120机器人),与其配套的机器人控制器型号为IRC5。
IRB120机器人是迄今为止最小的多用途机器人。
空气管线与用户线缆从底脚至手腕全部嵌入机身内部,易于机器人集成。
由于其出色的便捷性与集成性,使IRB120机器人成为同类产品中的佼佼者。
②ABB机器人有机械系统、控制系统和驱动系统三大重要部分组成。
期中,机械系统即为机器人本体,是机器人的支承基础和执行机构,包括基座、臂部、腕部;控制系统是机器人的大脑,是决定机器人功能和性能的主要因素,主要功能是根据作业指令程序以及从传感器反馈回来的信号,从而控制机器人在工作空间中的位置运动、姿态和轨迹规划、操作顺序及动作时间等;驱动系统是驱动机械系统动作的驱动装置。
③填写图片中设备型号或名称本体和IRC5紧凑型控制柜_______________________________________工作范围_______________________________________④完成IRB120机器人表格参数(2)多功能实训操作台①气压控制单元气压控制单元由减压阀、电磁阀、真空发生器、数显压力表组成,当空压机开启时,先经过减压阀,然后分成两个支路,一路过两位三通单控电磁阀,用来控制真空发生器,另一路过两位五通双控电磁阀,用来控制气爪的夹紧。