测量学计算
- 格式:doc
- 大小:526.00 KB
- 文档页数:4
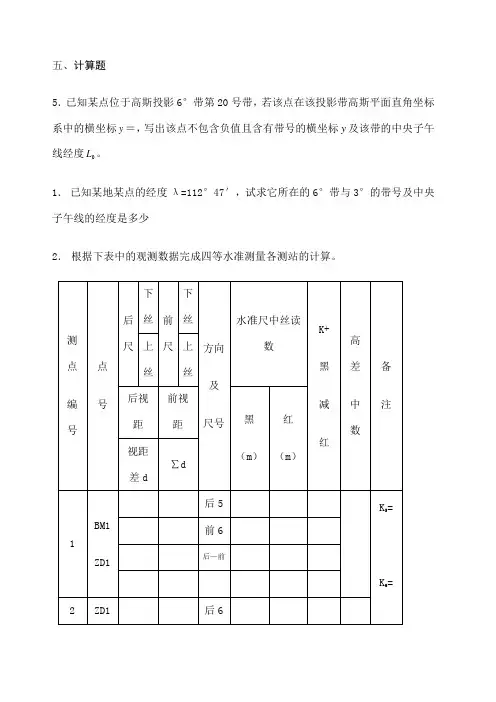
五、计算题5.已知某点位于高斯投影6°带第20号带,若该点在该投影带高斯平面直角坐标系中的横坐标y=,写出该点不包含负值且含有带号的横坐标y及该带的中央子午线经度L。
1.已知某地某点的经度λ=112°47′,试求它所在的6°带与3°的带号及中央子午线的经度是多少2.根据下表中的观测数据完成四等水准测量各测站的计算。
3.完成下表测回法测角记录的计算。
4.试算置仪器于M点,用极坐标法测设A点所需的数据。
已知300°25′17″,XM =,YM=,XA=,YA=,试计五、计算题1.某工程距离丈量容许误差为1/100万,试问多大范围内,可以不考虑地球曲率的影响。
2.调整下列闭合水准路线成果,并计算各点高程。
其中:水准点的高程HBM1=水准测量成果调整表测点测站数高差值高程m备注观测值m改正数mm调整值mBM1N1N2N3N 4BM 1∑实测高差∑h= 已知高差=H 终-H 始=0高差闭合差f h = 容许闭合差f h 容==一个测站的改正数=3. 完成下表竖直角测量记录计算。
测站 目标 竖盘位置 竖盘读数 ° ′ ″半测回角值 ° ′ ″一测回角值 ° ′ ″指标差竖盘形式OM左 81 18 42全圆式顺时针注记右278 41 30N左 124 03 30右235 56 54 4. 一根名义长为30米的钢尺与标准长度比较得实际长为米,用这根钢尺量得两点间距离为米,求经过尺长改正后的距离。
5.已知下列左角和右角,试计算线路的转角α,并说明路线是左转角还是右转角。
1)左角:β1=170°24′30″;2)右角:β2=165°2五、计算题1.丈量两段距离,一段往测为米,返测为米,另一段往测、返测分别为米和米。
问哪一段丈量的结果比较精确为什么两段距离丈量的结果各等于多少2.完成下列附合水准路线的成果调整表。
辅助计算:3.计算下图各边的方位角、反方位角和象限角。
测量学坐标增量的计算公式引言测量学是一门应用数学,它研究测量过程中的各种误差及其产生的原因,以及如何通过数据处理来减小这些误差。
其中,坐标增量的计算是测量学中一个重要的问题。
本文将介绍测量学中用于计算坐标增量的主要公式。
1. 坐标增量的定义在测量学中,坐标增量指的是一个点在测量过程中发生的位置变化量。
常用的表示方式是用一组坐标值表示该点在不同时间或不同测量状态下的位置。
比如,一个点在初始状态下的坐标为(X1,Y1,Z1),在后续状态下的坐标为(X2,Y2,Z2),则该点在两个状态之间发生的坐标增量为$(\\Delta X, \\Delta Y, \\Delta Z)$。
2. 坐标增量的计算公式测量学中常用的计算坐标增量的公式有以下几种:2.1 直接计算法直接计算法是最简单的一种计算方法,它通过对比不同状态下的坐标值直接计算出坐标增量。
计算公式如下:$$\\Delta X = X_2 - X_1$$$$\\Delta Y = Y_2 - Y_1$$$$\\Delta Z = Z_2 - Z_1$$2.2 中间增量法中间增量法是一种更精确的计算方法,它通过先计算出两个中间状态的坐标增量,然后再将其相加得到最终的坐标增量。
具体计算步骤如下:1.计算第一个中间状态的坐标增量:$$\\Delta X_1 = X_2 - X_1$$$$\\Delta Y_1 = Y_2 - Y_1$$$$\\Delta Z_1 = Z_2 - Z_1$$2.计算第二个中间状态的坐标增量:$$\\Delta X_2 = X_3 - X_2$$$$\\Delta Y_2 = Y_3 - Y_2$$$$\\Delta Z_2 = Z_3 - Z_2$$3.最终的坐标增量为两个中间状态的坐标增量之和:$$\\Delta X = \\Delta X_1 + \\Delta X_2$$$$\\Delta Y = \\Delta Y_1 + \\Delta Y_2$$$$\\Delta Z = \\Delta Z_1 + \\Delta Z_2$$2.3 位置平均法位置平均法是一种更精确的计算方法,它考虑了测量过程中可能存在的随机误差,并通过多次测量取平均值来减小误差的影响。
一、方位角的计算公式二、平曲线转角点偏角计算公式三、平曲线直缓、缓直点的坐标计算公式四、平曲线上任意点的坐标计算公式五、竖曲线上点的高程计算公式六、超高计算公式七、地基承载力计算公式八、标准差计算公式九、坐标中线测量与计算十、全站仪的使用方法和坐标测量步骤一、方位角的计算公式1. 字母所代表的意义:x1:QD的X坐标y1:QD的Y坐标x 2:ZD 的X 坐标 y 2:ZD 的Y 坐标 S :QD ~ZD 的距离 α:QD ~ZD 的方位角2. 计算公式:()()212212y y x x S -+-=1)当y 2- y 1>0,x 2- x 1>0时:1212x x y y arctg--=α 2)当y 2- y 1<0,x 2- x 1>0时:1212360x x y y arctg --+︒=α 3)当x 2- x 1<0时:1212180x x y y arctg--+︒=α 二、 平曲线转角点偏角计算公式1. 字母所代表的意义:α1:QD ~JD 的方位角 α2:JD ~ZD 的方位角 β:JD 处的偏角2. 计算公式:β=α2-α1(负值为左偏、正值为右偏)三、 平曲线直缓、缓直点的坐标计算公式1. 字母所代表的意义:U :JD 的X 坐标 V :JD 的Y 坐标 A :方位角(ZH ~JD )T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=D :JD 偏角,左偏为-、右偏为+2. 计算公式:直缓(直圆)点的国家坐标:X ′=U+T cos(A+180°)Y ′=V+T sin(A+180°)缓直(圆直)点的国家坐标:X ″=U+Tcos(A+D)Y ″=V+Tsin(A+D)四、 平曲线上任意点的坐标计算公式1. 字母所代表的意义:P :所求点的桩号B :所求边桩~中桩距离,左-、右+ M :左偏-1,右偏+1C :JD 桩号 D :JD 偏角L s :缓和曲线长 A :方位角(ZH ~JD ) U :JD 的X 坐标 V :JD 的Y 坐标T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=I=C-T :直缓桩号 J=I+L :缓圆桩号s L DRJ H -+=180π:圆缓桩号K=H+L :缓直桩号2. 计算公式: 1)当P<I 时中桩坐标:X m =U+(C-P)cos(A+180°) Y m =V+(C-P)sin(A+180°) 边桩坐标:X b =X m +Bcos(A+90°) Y b =Y m +Bsin(A+90°)2)当I<P<J 时()s230RL I P MA O π-︒+= ()()2390R I P I P G ---=中桩坐标:X m =U+Tcos(A+180°)+GcosOY m =V+Tsin (A+180°)+G sinO()s290RL I P W π-︒=边桩坐标:X b =X m +Bcos(A+MW +90°) Y b =Y m +Bsin(A+MW +90°)3)当J<P<H 时()()R J P L M A R J P R L M A O s s πππ-+︒+=⎪⎭⎫⎝⎛-︒+︒+=909090 ()RJ P R G π-︒=90sin2 中桩坐标:()O G R L M A R L L A T U X s ss m cos 30cos 90180cos 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()O G R L M A R L L A T V Y s ss m sin 30sin 90180sin 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()RJ P W π-︒=90边桩坐标:X b =X m +Bcos(O+MW +90°) Y b =Y m +Bsin(O+MW +90°)4)当H<P<K 时()sRL K P MMD A O π230180-︒-︒++= ()2390R P K P K G ---=中桩坐标:X m =U+Tcos(A+MD)+GcosO Y m =V+Tsin(A+MD)+GsinO()s290RL K P W π-︒=边桩坐标:X b =X m +Bcos(A+MD-MW +90°) Y b =Y m +Bsin(A+MD-MW +90°)5)当P>K 时中桩坐标:X m =U+(T+P-K)cos(A+MD) Y m =V+(T+P-K)sin(A+MD) 边桩坐标:X b =X m +Bcos(A+MD +90°) Y b =Y m +Bsin(A+MD +90°)注:计算公式中距离、长度、桩号单位:“米”;角度测量单位:“度”;若要以“弧度”为角度测量单位,请将公式中带°的数字换算为弧度。
测量学坐标计算公式是什么在测量学中,我们经常需要进行坐标计算,以确定物体在空间中的位置。
测量学坐标计算公式是一组数学公式,用于计算目标物体的坐标。
本文将介绍一些常用的测量学坐标计算公式,帮助我们了解测量学中的基本原理和方法。
1. 二维空间坐标计算公式在二维空间中,我们通常使用直角坐标系来表示物体的位置。
直角坐标系由X 轴和Y轴组成,物体的位置可以由X轴和Y轴上的坐标确定。
下面是二维空间中常用的坐标计算公式:•两点之间的距离公式:对于平面上的两个点A(x1, y1)和B(x2, y2),它们之间的距离可以使用以下公式计算:d = √((x2 - x1)^2 + (y2 - y1)^2) •点到直线的距离公式:对于平面上的一点P(x, y)和一条直线Ax + By + C = 0,点P到直线的距离可以使用以下公式计算: d = |(Ax + By + C)| /√(A^2 + B^2)2. 三维空间坐标计算公式在三维空间中,我们通常使用三维直角坐标系来表示物体的位置。
三维直角坐标系由X轴、Y轴和Z轴组成,物体的位置可以由X轴、Y轴和Z轴上的坐标确定。
下面是三维空间中常用的坐标计算公式:•两点之间的距离公式:对于空间中的两个点A(x1, y1, z1)和B(x2, y2, z2),它们之间的距离可以使用以下公式计算:d = √((x2 - x1)^2 + (y2 - y1)^2 + (z2 - z1)^2)•点到平面的距离公式:对于空间中的一点P(x, y, z)和一个平面Ax + By + Cz + D = 0,点P到平面的距离可以使用以下公式计算: d = |(Ax + By + Cz + D)| / √(A^2 + B^2 + C^2)•点到直线的距离公式:对于空间中的一点P(x, y, z)和一条直线的参数方程: x = x1 + at y = y1 + bt z = z1 + ct 点P到直线的距离可以使用以下公式计算:d = |(Ax + By + Cz + D)| / √(A^2 + B^2 + C^2)3. 坐标计算示例为了更好地理解坐标计算公式的应用,以下示例将展示如何使用这些公式计算物体之间的距离或与平面、直线的距离。
测量学坐标计算公式表在测量学中,坐标计算是一项基础而重要的任务。
通过测量物体的位置和形状,我们可以获得其准确的坐标信息,从而帮助我们进行进一步的分析和应用。
本文将介绍一些常用的测量学坐标计算公式,以帮助读者更好地理解和应用这些公式。
1. 二维坐标计算公式1.1. 距离公式测量学中最基础的公式之一是计算两点之间的距离。
对于平面坐标系中的两个点A(x1, y1)和B(x2, y2),它们之间的距离d可以通过以下公式计算:d = sqrt((x2 - x1)^2 + (y2 - y1)^2)1.2. 中点公式中点公式用于计算两个点的中点坐标。
对于平面坐标系中的两个点A(x1, y1)和B(x2, y2),它们的中点坐标M(x, y)可以通过以下公式计算:x = (x1 + x2) / 2y = (y1 + y2) / 21.3. 角度公式计算两条线段之间的夹角也是测量学中常见的任务。
对于平面坐标系中的两条线段AB和AC,它们之间的夹角θ可以通过以下公式计算:θ = arccos((AB · AC) / (|AB| * |AC|))其中,AB · AC表示向量的点乘,|AB|和|AC|表示向量的模。
2. 三维坐标计算公式在三维空间中,坐标计算稍微复杂一些。
下面介绍一些常见的三维坐标计算公式。
2.1. 距离公式与二维情况类似,计算三维空间中两点之间的距离也是一项基本的测量任务。
对于坐标系中的两点A(x1, y1, z1)和B(x2, y2, z2),它们之间的距离d可以通过以下公式计算:d = sqrt((x2 - x1)^2 + (y2 - y1)^2 + (z2 - z1)^2)2.2. 中点公式与二维情况类似,计算三维空间中两个点的中点也是常见的测量任务。
对于坐标系中的两个点A(x1, y1, z1)和B(x2, y2, z2),它们的中点坐标M(x, y, z)可以通过以下公式计算:x = (x1 + x2) / 2y = (y1 + y2) / 2z = (z1 + z2) / 22.3. 体积公式测量物体的体积是一项常见的任务。
测量学坐标方位角计算例题引言在测量学中,坐标方位角是指一个点相对于参考线的方位角度。
通过计算坐标方位角,可以确定点在平面直角坐标系中的位置。
本文将介绍一个测量学的坐标方位角计算例题,帮助读者更好地理解和运用坐标方位角的计算方法。
问题描述假设在平面直角坐标系中,有两个点A和B,已知点A的坐标为(2, 3),点B的坐标为(5, 6),求点B相对于点A的方位角。
计算步骤为了求解点B相对于点A的方位角,需要进行以下步骤的计算:1.计算两个点的坐标差值,得到点B相对于点A的坐标差(ΔX, ΔY)。
根据给定的数据,可以计算得到ΔX = 5 - 2 = 3,ΔY = 6 - 3 = 3。
2.根据坐标差值计算点B相对于点A的方位角。
方位角可以通过以下公式进行计算:方位角(θ) = arctan(ΔY / ΔX)其中,arctan表示反正切函数。
将ΔY和ΔX代入公式中,可以得到:方位角(θ) = arctan(3 / 3)3.计算反正切值。
通过数学计算或使用计算器,可以计算得到反正切值为1。
为了得到方位角的度数表示,需要将弧度转换为度数。
由于正切值1对应的弧度为π/4或45度,可以得出:方位角(θ) = 45度结论根据以上计算步骤,可以得出点B相对于点A的方位角为45度。
方位角的计算方法可以在测量学中应用于确定点在平面直角坐标系中的位置关系。
总结本文介绍了一个测量学的坐标方位角计算例题,通过计算两个点的坐标差值和应用反正切函数,得出了点B相对于点A的方位角为45度。
坐标方位角的计算对于确定点在平面直角坐标系中的位置非常重要,掌握这一计算方法对于测量学的学习和实践具有重要意义。
以上是关于测量学坐标方位角计算的例题说明,希望能够对读者理解和运用坐标方位角的计算方法有所帮助。
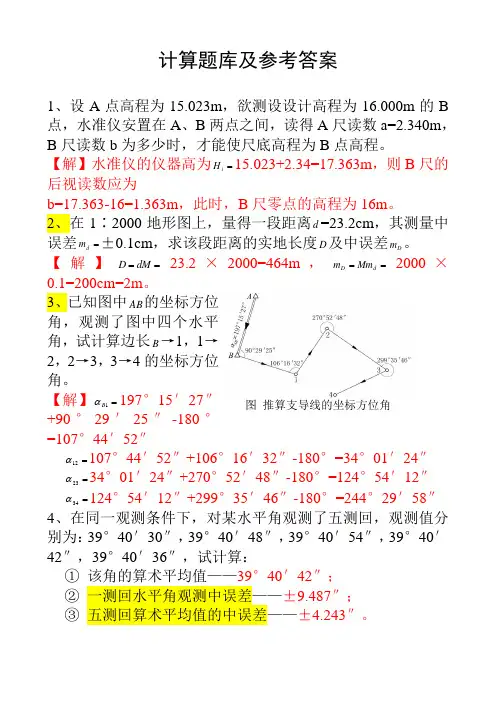
计算题库及参考答案1、设A 点高程为15.023m ,欲测设设计高程为16.000m 的B 点,水准仪安置在A 、B 两点之间,读得A 尺读数a=2.340m ,B 尺读数b 为多少时,才能使尺底高程为B 点高程。
【解】水准仪的仪器高为=iH 15.023+2.34=17.363m ,则B 尺的后视读数应为b=17.363-16=1.363m ,此时,B 尺零点的高程为16m 。
2、在1∶2000地形图上,量得一段距离d =23.2cm ,其测量中误差=dm ±0.1cm ,求该段距离的实地长度D 及中误差Dm 。
【解】==dM D 23.2×2000=464m ,==dD Mm m 2000×0.1=200cm=2m 。
3、已知图中AB 的坐标方位角,观测了图中四个水平角,试计算边长B →1,1→2,2→3,3→4的坐标方位角。
【解】=1B α197°15′27″+90°29′25″-180°=107°44′52″=12α107°44′52″+106°16′32″-180°=34°01′24″ =23α34°01′24″+270°52′48″-180°=124°54′12″ =34α124°54′12″+299°35′46″-180°=244°29′58″ 4、在同一观测条件下,对某水平角观测了五测回,观测值分别为:39°40′30″,39°40′48″,39°40′54″,39°40′42″,39°40′36″,试计算:① 该角的算术平均值——39°40′42″; ② 一测回水平角观测中误差——±9.487″;③ 五测回算术平均值的中误差——±4.243″。
一、方位角的计算公式二、平曲线转角点偏角计算公式三、平曲线直缓、缓直点的坐标计算公式四、平曲线上任意点的坐标计算公式五、竖曲线上点的高程计算公式六、超高计算公式七、地基承载力计算公式八、标准差计算公式九、坐标中线测量与计算十、全站仪的使用方法和坐标测量步骤一、 方位角的计算公式1. 字母所代表的意义:x 1:QD 的X 坐标 y 1:QD 的Y 坐标 x 2:ZD 的X 坐标 y 2:ZD 的Y 坐标 S :QD ~ZD 的距离 α:QD ~ZD 的方位角2. 计算公式:()()212212y y x x S -+-=1)当y 2- y 1>0,x 2- x 1>0时:1212x x y y arctg--=α 2)当y 2- y 1<0,x 2- x 1>0时:1212360x x y y arctg --+︒=α 3)当x 2- x 1<0时:1212180x x y y arctg--+︒=α 二、 平曲线转角点偏角计算公式1. 字母所代表的意义:α1:QD ~JD 的方位角 α2:JD ~ZD 的方位角β:JD 处的偏角2. 计算公式:β=α2-α1(负值为左偏、正值为右偏)三、 平曲线直缓、缓直点的坐标计算公式1. 字母所代表的意义:U :JD 的X 坐标 V :JD 的Y 坐标 A :方位角(ZH ~JD )T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=D :JD 偏角,左偏为-、右偏为+2. 计算公式:直缓(直圆)点的国家坐标:X ′=U+T cos(A+180°)Y ′=V+Tsin(A+180°)缓直(圆直)点的国家坐标:X ″=U+T cos(A+D)Y ″=V+Tsin(A+D)四、 平曲线上任意点的坐标计算公式1. 字母所代表的意义:P :所求点的桩号B :所求边桩~中桩距离,左-、右+ M :左偏-1,右偏+1C :JD 桩号 D :JD 偏角 L s :缓和曲线长 A :方位角(ZH ~JD ) U :JD 的X 坐标 V :JD 的Y 坐标T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=I=C-T :直缓桩号 J=I+L :缓圆桩号s L DRJ H -+=180π:圆缓桩号K=H+L :缓直桩号2. 计算公式: 1)当P<I 时中桩坐标:X m =U+(C-P)cos(A+180°) Y m =V+(C-P)sin(A+180°)边桩坐标:X b =X m +Bcos(A+90°) Y b =Y m +Bsin(A+90°)2)当I<P<J 时()s230RL I P MA O π-︒+= ()()2390R I P I P G ---=中桩坐标:X m =U+Tcos(A+180°)+GcosO Y m =V+Tsin(A+180°)+GsinO()s290RL I P W π-︒=边桩坐标:X b =X m +Bcos(A+MW+90°) Y b =Y m +Bsin(A+MW+90°)3)当J<P<H 时()()R J P L M A R J P R L M A O s s πππ-+︒+=⎪⎭⎫⎝⎛-︒+︒+=909090 ()RJ P R G π-︒=90sin2中桩坐标:()O G R L M A R L L A T U X s ss m cos 30cos 90180cos 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()O G R L M A R L L A T V Y s ss m sin 30sin 90180sin 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()RJ P W π-︒=90边桩坐标:X b =X m +Bcos(O+MW+90°)Y b =Y m +Bsin(O+MW+90°)4)当H<P<K 时()sRL K P MMD A O π230180-︒-︒++= ()2390R P K P K G ---=中桩坐标:X m =U+Tcos(A+MD)+GcosO Y m =V+Tsin(A+MD)+GsinO()s290RL K P W π-︒=边桩坐标:X b =X m +Bcos(A+MD-MW+90°) Y b =Y m +Bsin(A+MD-MW+90°)5)当P>K 时中桩坐标:X m =U+(T+P-K)cos(A+MD) Y m =V+(T+P-K)sin(A+MD) 边桩坐标:X b =X m +Bcos(A+MD+90°) Y b =Y m +Bsin(A+MD+90°)注:计算公式中距离、长度、桩号单位:“米”;角度测量单位:“度”;若要以“弧度”为角度测量单位,请将公式中带°的数字换算为弧度。

测量学坐标增量计算1. 引言测量学中的坐标增量计算是指通过已知的测量点坐标和线性尺寸,计算出其他未知点的坐标值。
这在工程测量、地理测量等领域中广泛应用。
坐标增量计算是测量学的基础,能够为工程设计、地图制作等提供准确的空间数据。
本文将介绍坐标增量计算的基本原理与计算方法。
2. 坐标增量计算原理坐标增量计算的原理基于测量学中的三角测量原理和差分测量原理。
三角测量原理是通过测量已知点之间的线性尺寸,利用三角形的几何关系计算出未知点的坐标。
差分测量原理则是通过测量已知点的坐标和线性尺寸的变化量,计算出未知点的坐标增量。
3. 坐标增量计算方法3.1 三角形坐标增量计算方法三角形坐标增量计算方法是根据测量的线性尺寸和已知点的坐标,通过三角形的几何关系计算出未知点的坐标。
具体方法如下:1.根据测量得到的线性尺寸,计算出三角形的边长。
2.利用三角函数计算出三角形的内角。
3.利用已知点的坐标和内角,利用三角形的正弦定理和余弦定理计算出未知点的坐标。
3.2 差分坐标增量计算方法差分坐标增量计算方法是以已知点的坐标和线性尺寸的变化量为基础,通过差分测量原理计算出未知点的坐标增量。
具体方法如下:1.通过测量得到已知点的坐标和线性尺寸。
2.根据测量结果,计算出线性尺寸的变化量。
3.利用线性尺寸的变化量和已知点的坐标,利用差分测量原理计算出未知点的坐标的增量。
4. 坐标增量计算的应用坐标增量计算在工程测量、地理测量等领域具有广泛的应用。
以下是坐标增量计算的一些典型应用:•地图制作:通过测量已知点和线性尺寸,计算出其他未知点的坐标值,用于制作地图和地理信息系统。
•工程设计:在工程设计中,通过测量已知点和线性尺寸,计算出其他未知点的坐标,用于确定工程设计的位置和尺寸。
•高精度测量:通过测量已知点和线性尺寸的变化量,计算出其他未知点的坐标增量,实现对高精度测量的需求。
5. 结论坐标增量计算是测量学中重要的计算方法,能够通过已知的测量点坐标和线性尺寸计算出其他未知点的坐标。
测量学中坐标方位角计算公式在测量学中,坐标方位角是用于描述目标物体或点在水平坐标系中的方向的数值。
坐标方位角是指从北方向顺时针旋转到目标点所需的角度。
在实际的测量工作中,计算坐标方位角是非常重要的,它可以帮助测量员准确地确定目标点在地图上的位置。
计算公式计算坐标方位角的主要公式是使用三角函数来实现的。
具体的计算公式如下:方位角 = arctan((Y2 - Y1) / (X2 - X1))在上述公式中,X1和Y1表示起点的水平坐标值,X2和Y2表示终点的水平坐标值。
arctan表示反正切函数,它可以将斜率转化为角度值。
通过使用这个计算公式,我们可以得到起点和终点之间的坐标方位角。
需要注意的是,上述公式仅适用于计算水平平面上的坐标方位角。
如果需要在垂直平面上计算坐标方位角,我们还需要考虑高程的影响。
在这种情况下,计算公式会稍有不同,需要引入高程差的概念。
示例为了更好地理解坐标方位角的计算过程,我们可以通过一个示例来说明。
假设我们有两个点A和B,它们的水平坐标分别为:点A:(X1, Y1) = (100, 200)点B:(X2, Y2) = (150, 280)现在我们来计算点A和点B之间的坐标方位角。
首先,我们将点A和点B的坐标值代入计算公式中:方位角 = arctan((280 - 200) / (150 - 100))接下来,我们计算分子和分母的差值:方位角 = arctan(80 / 50)然后,我们计算这两个差值的比值:方位角 = arctan(1.6)最后,使用反正切函数来计算坐标方位角的数值:方位角≈ 56.31°所以,根据计算结果,点A和点B之间的坐标方位角约为56.31°。
结论测量学中的坐标方位角是用于描述目标物体或点在水平坐标系中方向的数值。
通过使用三角函数计算公式,我们可以准确地确定起点和终点之间的坐标方位角。
在计算时需要注意坐标值的顺序和差值的计算方法。
通过实际的计算示例,我们可以更好地理解和应用坐标方位角的计算公式。
测量学坐标计算原理与方法引言测量学是一门涉及测量、计算和分析的学科,它在各个领域有重要的应用。
测量学的核心是测量,而测量的结果通常以坐标形式表达。
本文将介绍测量学中常用的坐标计算原理与方法,希望能对读者有所帮助。
坐标系统在测量学中,坐标系统是表示位置的一种方式。
常见的坐标系统有直角坐标系和极坐标系。
直角坐标系使用x、y和z轴来表示一个点的位置,而极坐标系使用半径和角度来表示。
不同的测量任务需要选择适当的坐标系统。
坐标测量方法坐标测量是测量学中最常见的任务之一。
下面介绍几种常用的坐标测量方法。
激光测距法激光测距法是一种利用激光器发射的激光束测量距离的方法。
通过测量激光束从发射到接收所经过的时间,并根据光速计算出距离。
这种方法可以达到很高的精度,适用于需要高精度测量的任务。
全站仪测量法全站仪是一种综合了测角仪、测距仪和数据处理仪的仪器。
它可以通过测角和测距来确定物体的位置坐标。
全站仪能够在一次测量中获取多个点的坐标信息,并且可以进行自动化数据处理,提高工作效率。
GPS定位法GPS定位法是一种利用全球定位系统(GPS)进行测量的方法。
它通过接收多颗卫星发射的信号,根据信号的传播时间和接收时间计算出测量点的位置坐标。
GPS定位法适用于大范围和开放区域的测量任务,可以实现较高的定位精度。
坐标计算方法测量得到的原始数据通常需要进行计算和处理才能得到最终的坐标结果。
下面介绍几种常用的坐标计算方法。
最小二乘法最小二乘法是一种最常用的数据处理方法,用于处理测量数据中的误差。
通过最小化观测值与计算值之间的差异,可以得到最优的坐标计算结果。
最小二乘法可以有效地提高坐标计算的精度。
三角测量法三角测量法是一种利用三角形边长和角度关系计算坐标的方法。
通过测量物体到测量点的距离和测量点之间的角度,可以使用三角关系计算出目标点的坐标。
三角测量法适用于地面测量和建筑测量等任务。
插值方法插值方法是一种通过已知的坐标点计算出其他位置的坐标的方法。
测量学计算题及答案 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】五、计算题5.已知某点位于高斯投影6°带第20号带,若该点在该投影带高斯平面直角坐标系中的L。
横坐标y=,写出该点不包含负值且含有带号的横坐标y及该带的中央子午线经度0 1.已知某地某点的经度λ=112°47′,试求它所在的6°带与3°的带号及中央子午线的经度是多少2.根据下表中的观测数据完成四等水准测量各测站的计算。
3.完成下表测回法测角记录的计算。
测站测回数盘位目标水平度盘读数° ′ ″水平角草图半测回值° ′ ″一测回值° ′ ″平均值° ′ ″O 1左A 0 12 00B 91 45 00右A 180 11 30B 271 45 00 2左A 90 11 48B 181 44 54右A 270 12 12B 1 45 124.试算置仪器于M点,用极坐标法测设A点所需的数据。
已知300°25′17″,X M=,Y M=,X A=,Y A=,试计五、计算题1.某工程距离丈量容许误差为1/100万,试问多大范围内,可以不考虑地球曲率的影响。
2.调整下列闭合水准路线成果,并计算各点高程。
其中:水准点的高程H BM1=水准测量成果调整表测点测站数高差值高程m 备注观测值m 改正数mm调整值mBM1N1N2N3N4BM1∑实测高差∑h= 已知高差=H终-H始=0高差闭合差f h= 容许闭合差f h容== 一个测站的改正数=3.完成下表竖直角测量记录计算。
测站目标竖盘位置竖盘读数° ′ ″半测回角值° ′ ″一测回角值° ′ ″指标差竖盘形式O M左81 18 42 全圆式顺时针注记右278 41 30N左124 03 30右235 56 544.一根名义长为30米的钢尺与标准长度比较得实际长为米,用这根钢尺量得两点间距离为米,求经过尺长改正后的距离。
测 量 学 习 题 库三.计算题(一)测量学基础知识(1-18题)1.用钢尺丈量一条直线,往测丈量的长度为217.30m ,返测为217.38m ,今规定其相对误差不应大于1/2000,试问:(1)此测量成果是否满足精度要求?(2)按此规定,若丈量100m ,往返丈量最大可允许相差多少毫米?2.对某段距离往返丈量结果已记录在距离丈量记录表中,试完成该记录表的计算工作,并求出其丈量精度,见表1。
表1 测线 整尺段 零尺段 总计 差数 精度 平均值AB往 505⨯ 18.964返 504⨯ 46.456 22.3003.在对S 3型微倾水准议进行i 角检校时,先将水准仪安置在A 和B 两立尺点中间,使气泡严格居中,分别读得两尺读数为1a =1.573m ,b 1=1.415m ,然后将仪器搬到A 尺附近,使气泡居中,读得2a =1.834m ,b 2=1.696m ,问(1)正确高差是多少?(2)水准管轴是否平行视准轴?(3)若不平行,应如何校正?4.如图1所示,在水准点BM 1至BM 2间进行水准测量,试在水准测量记录表中(见表2)。
进行记录与计算,并做计算校核(已知m BM m BM 110.142,952.13821==)。
图1测点 后视读数(m ) 前视读数(m ) 高差(m ) 高程(m )+ -∑5.在水准点B a M 和b BM 之间进行水准测量,所测得的各测段的高差和水准路线长如图2所示。
已 知B a M 的高程为5.612m ,b BM 的高程为5.400m 。
试将有关数据填在水准测量高差调整表中(见 表3),最后计算水准点1和2的高程。
图2表3:水准测量高程调整表点号路线长(km ) 实测高差(m ) 改正数(mm ) 改正后高差(m ) 高程(m )A BM5.61212B BM∑5.400=-A B H H=H f =允H f每公里改正数=6.在水准a BM 和b BM 之间进行普通水准测量,测得各测段的高差及其测站数n i 如图3所示。
计算题库及参考答案1、设A 点高程为15.023m ,欲测设设计高程为16.000m 的B 点,水准仪安置在A 、B 两点之间,读得A 尺读数a=2.340m ,B 尺读数b 为多少时,才能使尺底高程为B 点高程。
【解】水准仪的仪器高为=i H 15.023+2.23=17.363m ,则B 尺的后视读数应为b=17.363-16=1.363m ,此时,B 尺零点的高程为16m 。
2、在1∶2000地形图上,量得一段距离d =23.2cm ,其测量中误差=d m ±0.1cm ,求该段距离的实地长度D 及中误差D m 。
【解】==dM D 23.2×2000=464m ,==d D Mm m 2000×0.1=200cm=2m 。
3、已知图中AB 的坐标方位角,观测了图中四个水平角,试计算边长B →1,1→2,2→3,3→4的坐标方位角。
【解】=1B α197°15′27″+90°29′25″-180°=107°44′52″=12α107°44′52″+106°16′32″-180°=34°01′24″=23α34°01′24″+270°52′48″-180°=124°54′12″=34α124°54′12″+299°35′46″-180°=244°29′58″4、在同一观测条件下,对某水平角观测了五测回,观测值分别为:39°40′30″,39°40′48″,39°40′54″,39°40′42″,39°40′36″,试计算:① 该角的算术平均值——39°40′42″; ② 一测回水平角观测中误差——±9.487″; ③ 五测回算术平均值的中误差——±4.243″。
测量学正反坐标方位角计算例题
在测量学中,方位角是指点的方向与参考方向之间的角度。
正反坐标方位角是
指在正反测量中,通过测定两点的坐标值来计算两点间的方位角。
本文将通过一个具体的计算例题,介绍如何计算测量学中的正反坐标方位角。
问题描述
已知点A的坐标为(100,200),点B的坐标为(200,300)。
请计算点A相对
于点B的方位角。
解题过程
第一步,我们需要获得AB线段的坐标差值。
根据已知数据,点A与点B的坐
标差值为(200-100,300-200) = (100,100)。
第二步,我们需要计算方位角。
正反坐标方位角的计算公式如下:
方位角 = atan(X差值 / Y差值)
其中,atan为反正切函数,用来求取给定参数的反正切值。
将AB线段的坐标差值代入上述公式,我们得到方位角为:
方位角= atan(100 / 100) = atan(1) ≈ 45°
因此,点A相对于点B的方位角约为45°。
结论
通过以上计算,我们得出点A相对于点B的方位角约为45°。
总结
测量学中的正反坐标方位角是指通过测定两点的坐标值来计算两点间的方位角。
本文通过一个具体的计算例题,详细介绍了计算的步骤和公式。
在实际测量中,熟练掌握正反坐标方位角的计算方法,能够帮助测量人员准确地确定方向,提高测量结果的精度。
四.计算题
(一)测量学基础知识
1.对某段距离往返丈量结果已记录在距离丈量记录表中,试完成该记录表的计算工作,并求出其丈量精度,见表1。
表1
2.在对S 3型微倾水准议进行角检校时,先将水准仪安置在A 和B 两立尺点中间,使气泡严格居中,分别读得两尺读数为1a =1.573m ,b 1=1.415m ,然后将仪器搬到A 尺附近,使气泡居中,读得2a =1.834m ,b 2=1.696m ,问
(1)正确高差是多少?(2)水准管轴是否平行视准轴?(3)若不平行,应如何校正? 3.如图1所示,在水准点BM 1至BM 2间进行水准测量,试在水准测量记录表中(见表2)。
进行记录与计算,并做计算校核(已知m BM m BM 110.142,952.13821==)。
图1
表2:水准测量记录表
4.在水准点B a M 和b BM 之间进行水准测量,所测得的各测段的高差和水准路线长如图2所示。
已知B a M 的高程为5.612m ,b BM 的高程为5.400m 。
试将有关数据填在水准测量高差调整表中(见表3),最后计算水准点1和2的高程。
图2
表3:水准测量高程调整表
5.在水准a BM 和b BM 之间进行普通水准测量,测得各测段的高差及其测站数n i 如图3所示。
试将有关数据填在水准测量高差调整表中(见表4),最后请在水准测量高差调整表中,计算出水准
点1和2 的高程(已知a BM 的高程为5.612m ,b BM 的高程为5.412m )。
表4:水准测量高程调整表
图3
盘的
读数为6º23′30″和95º48′00″;盘右位置照准C点,后照准A点,水平度盘读数分别为275º48′18″
和186º23′18″,试记录在测回法测角记录表中(见表5),并计算该测回角值是多少?
表5:测回法测角记录表
112º34′24″,盘右时竖盘读数是247º22′48″。
试求(1)目标P的竖直角;(2)判断该仪器是否有指标差存在?是否需要校正?(竖盘盘左的注记形式:度盘顺时针刻划,物镜端为0º,目镜端为180º,指标指向90º位置)
8.某台经纬仪的竖盘构造是:盘左位置当望远镜水平时,指标指在90º,竖盘逆时针注记,物镜端为0º。
用这台经纬仪对一高目标P进行观测,测得其盘右的读数为263º18′25″,试确定盘右的竖直角计算公式,并求出其盘右时的竖直角。
10.对某基线丈量六次,其结果为:L1=246.535m,L2=246.548m,L3=246.520m,
L4=246.529m,L5=246.550m,L6=246.537m。
试求:(1)算术平均值;
(2)每次丈量结果的中误差;(3)算术平均值的中误差和基线相对误差。
12.在等精度观测条件下,对某三角形进行四次观测,其三内角之和分别为:179º59′59″, 180º00′08″,179º59′56″,180º00′02″。
试求:(1)三角形内角和的观测中误差? (2)每个内角的观测中误差?
14.某闭合导线,其横坐标增量总和为-0.35m ,纵坐标增量总和为+0.46m ,如果导线总长度为1216.38m ,试计算导线全长相对闭合差和边长每100m 的坐标增量改正数?
15.已知四边形闭合导线内角的观测值见表7,并且在表中计算(1)角度闭合差;(2)改正后角度值;
(3)推算出各边的坐标方位角。
=β
=βf
16.在方向观测法的记录表中(见表8),完成其记录的计算工作。
18.已知测站点高程H =81.34m ,仪器高i =1.42m ,各点视距测量记录如表9。
试求出各地
形点的平距及高程(竖直角计算公式为:左α=90º-L )。
表9。