旋转曲面的方程直角坐标系
- 格式:ppt
- 大小:512.50 KB
- 文档页数:25
空间几何旋转曲面方程记忆口诀空间几何旋转曲面方程记忆口诀一、引子在学习空间几何的过程中,我们经常会遇到旋转曲面方程这一内容。
它们在三维空间中呈现出各种不同的形态,对于我们理解和掌握空间几何的知识至关重要。
但是,由于其复杂的形式和多样的变化,我们往往会感到困惑和不知所措。
本文将结合口诀的形式,带领大家逐步记忆和理解空间几何旋转曲面方程,希望对大家的学习能够有所帮助。
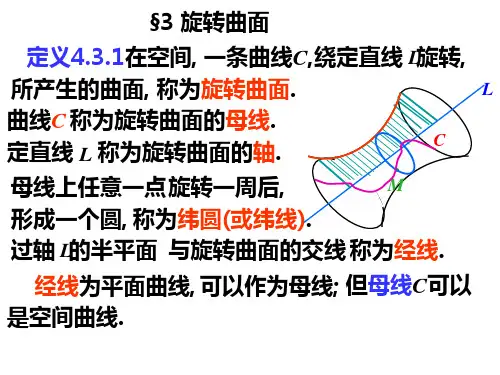
二、空间几何旋转曲面简介在空间几何中,旋转曲面是指直线或者曲线绕着一条轴线旋转而形成的曲面。
它们可以分为圆锥曲面、双曲面、抛物面等多种类型,每种类型又有不同的特点和方程形式。
而要深入理解和掌握这些旋转曲面的方程,我们首先需要记忆它们的具体形式和特点。
三、提出口诀为了更好地帮助大家记忆空间几何旋转曲面的方程,我特意设计了如下口诀,希望能够带给大家一些帮助:“圆锥曲面轴中心,双曲面两异心。
抛物面退化记,口诀带你追。
”四、口诀解读1. 圆锥曲面轴中心:圆锥曲面的方程一般形式为:\( \frac{x^2}{a^2} + \frac{y^2}{b^2} - \frac{z^2}{c^2} = 0 \)当圆锥曲面的轴与坐标轴重合时,即轴线通过空间坐标系的原点时,称之为轴中心圆锥曲面。
2. 双曲面两异心:双曲面的方程有两种形式,一般的双曲面方程为:\( \frac{x^2}{a^2} + \frac{y^2}{b^2} - \frac{z^2}{c^2} = 1 \)当双曲面有两个焦点且与坐标轴相交时称之为双曲面两异心。
3. 抛物面退化记:抛物面的一般方程为:\( z = ax^2 + by^2 \)当抛物面变化成简单曲线的时候,我们称之为抛物面退化。
五、口诀应用以上口诀为大家概括了圆锥曲面、双曲面和抛物面的方程形式和特点。
我们可以根据这些口诀,快速记忆和掌握各类旋转曲面的方程,帮助我们更好地理解和应用空间几何的知识。
六、个人观点对于空间几何旋转曲面方程的记忆,我认为口诀是一种非常有效且有趣的方式。
参数方程求旋转曲面旋转曲面是指一个二维曲线绕着一个定轴旋转形成的立体图形。
在数学中,我们可以通过一个参数方程来描述旋转曲面的形状。
本文将介绍旋转曲面的基本概念以及使用参数方程求解旋转曲面的方法。
首先,我们来说明一下什么是旋转曲面。
旋转曲面是指一个平面上的曲线沿着一个固定轴线旋转一周所形成的曲面。
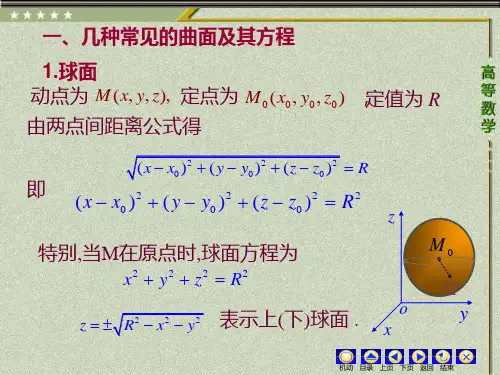
比如,当我们把一个二维平面上的圆绕着垂直于平面的轴线旋转一周,就可以得到一个球体,这就是一个旋转曲面的例子。
旋转曲面的参数方程形式可以通过以下步骤得到。
第一步,我们需要选择一个平面上的曲线作为旋转曲面的基础曲线。
这个曲线可以是任意形状的,比如直线、圆、抛物线等。
在本文中,我们以一个简单的圆为例来讲解。
第二步,我们需要选择一个轴线作为旋转曲面的旋转轴。
这个轴线可以是平面内的一条直线,也可以是垂直于平面的直线。
在本文中,我们选择垂直于平面的直线作为旋转轴。
第三步,我们需要引入一个参数来描述旋转曲面的旋转角度。
这个参数可以取任意实数值,表示旋转曲面沿着旋转轴旋转的角度。
在本文中,我们用θ来表示这个角度。
有了上述三个步骤,我们就可以得到旋转曲面的参数方程了。
以一个圆绕着垂直于平面的轴线旋转为例,我们可以得到以下参数方程:x = r * cos(θ)y = r * sin(θ)z = h其中,r是圆的半径,h是轴线到圆心的距离。
使用这个参数方程,我们可以得到圆绕着轴线旋转一周所形成的旋转曲面。
当θ取值从0到2π时,曲线就完成了一周旋转,同时生成了一个完整的球体。
我们可以通过改变r和h的值,来控制生成的球体的大小和位置。
例如,当r和h都为正数时,球体将位于轴线的正方向,当r和h都为负数时,球体将位于轴线的负方向。
除了圆,我们还可以选择其他形状的曲线,如椭圆、抛物线、或者自定义的曲线作为旋转曲面的基础曲线。
只要我们能够得到基础曲线在平面上的参数方程,就可以通过类似的方法来求解旋转曲面的参数方程。
需要注意的是,以上介绍的是一个基础的旋转曲面的参数方程求解方法。

直线绕坐标轴旋转的曲面方程如果一条直线绕坐标轴旋转,可以生成一个曲面。
这个曲面的方程可以用常微分方程的解来表示,但是比较复杂。
下面我们介绍一个简单的解法。
假如一条直线在 x 轴上,它的方程可以写成 y = kx + b。
现在我们要求这条直线绕 x 轴旋转会生成什么样的曲面。
我们可以用以下步骤来推导它的方程:第一步,假设这个曲面是关于x轴旋转对称的,那么它可以用一个函数y=f(x)来表示。
考虑图中的一个点P,它的坐标为(x,y)。
如果P绕x轴旋转,它会生成一个新的点P',它的坐标为(x',y')。
我们可以用勾股定理来计算P'的坐标:x' = sqrt(x^2 + y^2)。
y'=y。
第二步,根据关于x轴旋转对称的特点,我们可以得到:y' = f(x') = f(sqrt(x^2 + y^2))。
第三步,在直角坐标系中,对于某个点 P(x, y),它到 x 轴的距离为 r = sqrt(x^2 + y^2)。
因此我们可以把第二步中的 f(x') 写成 f(r)。
这样我们就得到了曲面的方程:y = f(sqrt(x^2 + y^2))。
这个方程描述的是一个旋转体,它的截面是一个与 x 轴垂直的曲线y=f(r)。
而 y=f(r) 的形状由直线 y=kx+b 决定。
因此我们可以用 y=f(r) 来表示整个曲面的形状:y = k * sqrt(x^2 + y^2) + b。
这就是一条直线绕坐标轴旋转生成的曲面方程。
绕z轴转动一周的曲面方程绕z轴转动一周的曲面方程涉及到极坐标系的坐标转换。
在极坐标系中,一个点的坐标可以通过极径和极角来表示,其中极径是从原点到点的距离,极角是从正半轴逆时针旋转的角度。
我们假设曲面方程的极径为r,极角为θ,则曲面上的任意一点可以表示为(r,θ,z),其中z表示该点在z轴上的位置。
为了找到绕z轴转动一周的曲面方程,我们可以考虑绕z轴旋转的效果。
当我们固定z轴不动时,颗粒点将围绕z轴旋转,旋转一周后回到原来的位置。
因此,我们可以通过找到使得z坐标不变的极角范围,从而得到绕z轴转动一周的曲面方程。
考虑绕z轴旋转一周的过程,极角θ的取值范围应该是从0到2π。
当θ取值在这个范围内时,颗粒点将旋转一周后回到原来的位置。
接下来,我们需要确定极径r的取值范围。
为了尽可能简化问题,我们可以将绕z轴旋转一周的曲面定为一个立体旋转体,即所有的点到z轴的距离相等。
假设这个距离为d,我们可以得到曲面上的每个点到z轴的距离r = d。
综上所述,绕z轴转动一周的曲面方程可以表示为(r,θ,z),其中r = d是一个常数,θ的取值范围为0到2π,z的取值范围可以根据实际情况确定。
举一个具体的例子来说明:假设我们围绕z轴旋转一周的曲面是一个圆柱体,半径为R,高度为H。
在极坐标系中,圆柱体的方程为(r,θ,z),其中r的取值范围是0到R,θ的取值范围是0到2π,z 的取值范围是0到H。
综合以上讨论,绕z轴转动一周的曲面方程可以表示为:r = d,其中d为常数,θ的取值范围为0到2π,z的取值范围根据实际情况确定。
当然,这只是一个简单的例子,实际上绕z轴转动一周的曲面可能具有更复杂的形状和方程。
根据具体情况,可以使用不同的数学方法和工具来确定和表示绕z轴转动一周的曲面方程。
总结起来,绕z轴转动一周的曲面方程与极坐标系密切相关,通过确定极径和极角的取值范围,可以得到描述曲面的方程。
这个方程可以是简单的形式,也可以是复杂的形式,具体取决于曲面的形状和特性。
直线绕y轴旋转的曲面方程
曲面几何学是数学的一个分支,主要用来分析变形的物体的形状,大多数应用曲面几何学的地方都在工程,科学和艺术领域。
曲面几何
学中一个经典的问题是曲面绕y轴旋转,这个问题也称为曲面拉伸和
形变。
曲面绕y轴旋转的方程可以简单的表示为:z=f(x,y)=a*x^2
+by+c,其中a,b,c是常数。
这个方程表示y轴上一条直线绕y轴旋转
绕一个椭圆。
它的曲面在四个方向中旋转:x > 0,y > 0,x < 0,y
< 0。
曲面绕y轴旋转的过程中可以绘制出一系列的抛物线来描述曲面
的形状。
由于空间旋转椭圆是和空间样条椭圆一致的,所以它的曲线
也可以被展示出来。
曲面绕y轴旋转的方程也可以用来分析曲面的界面。
这些界面可
以用来实现一些机械和精密仪器。
通过曲面几何学可以实现更加细致
的精度控制。
曲面绕y轴旋转的方程也可以用来模拟实际场景,例如地理数据,水文流量,大气数据,和声学数据等等。
这些数据可以被分析,测量,模拟,并且能够更加精确地描述实际现象。
曲面绕y轴旋转的方程也可以应用在艺术领域,通过这样的方程
可以实现精美的立体造型来搭配一定风格的设计。
总之,曲面绕y轴旋转的方程可以应用在很多方面,可以实现精
确控制,用来模拟物理现象,也可以用来设计精美的立体造型。