F18 大黄蜂 战斗机 中文手册 自动航母降落
- 格式:docx
- 大小:92.93 KB
- 文档页数:5

AGM-84H SLAM-ER/AGM-154 JSOW/GBU-29/30/31 JDAM GPS 制导武器这三个系列的武器都使用最新的全球定位系统制导系统,同时也具有非常类似的HUD/SMS显示和控制。
AGM-84H SLAM-ER 是最初基于捕鲸叉反舰导弹的防区外攻击导弹的升级版本。
“ER”代表扩大的反应,这就意味着它比最初的SLAM型号具有更大的射程和准确性。
AGM-154 联合防区外武器(JSOW)被定于代替美国空军的GBU-15 和AGM-130 页就是美国海军的Walleye。
它是一种固定使用1000磅GP战斗部或集束子弹头的滑翔类武器。
GBU29/30/31联合直接攻击弹(JDAM)一个可使用1000和2000磅GP战斗部或2000磅渗透战斗部的武器家族。
JDAM被用于铺路石系列激光制导炸弹系列的补充武器,并总有一天将完全取代这个系列的武器。
GPS 制导武器HUD 符号这些武器的各个类型都使用相同基础的HUD符号:×上升操作线(仅在SLAM-ER):上升操作线提供到达选择的发射投放高度的提示。
×方位操作提示:方位操作提示提供一个相对于指定目标的最佳发射点的操作。
×在域提示:指出选择的武器发射符合的所有条件,和下面在GPS制导武器SMS MDI页面中描述的相同。
×武器选择/状态指示:在这个位置显示选择的武器类型。
×到达发射点的时间(TTLP):TTLP指出到达选择的武器的理想发射点的时间。
如果计算的TTLP 超过99 秒,那么显示将限制在99 秒直到TTLP 变得小于99 秒。
×到发射点距离(LP):以海浪表示的到达理想发射点的距离。
GPS 制导武器SMS(挂载)MDI 页面符号这些武器的各个挂载页面选项基于捕鲸叉挂载页面格式,彼此之间非常类似。
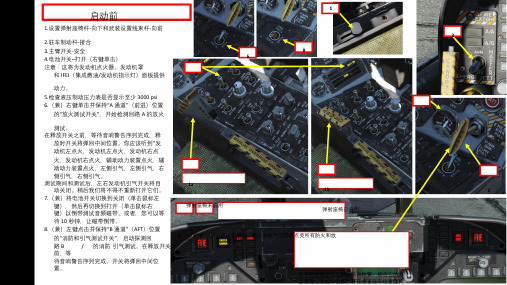
1启动前1.设置弹射座椅杆-向下和武装设置线束杆-向前3 2.驻车制动杆-接合3.主臂开关-安全4.电池开关–打开(右键单击)注意:这将为发动机点火器、发动机罩68和IFEI(集成燃油/发动机指示灯)面板提供4动力。
5.检查液压制动压力表是否显示至少3000 psi6.(兼)右键单击并保持“A通道”(前进)位置的“放火测试开关”,开始检测回路A的放火5 测试。
在释放开关之前,等待音响警告序列完成,释放时开关将弹回中间位置。
你应该听到“发动机左点火,发动机左点火,发动机右点火,发动机右点火,辅助动力装置点火,辅助动力装置点火,左侧引气,左侧引气,右侧引气,右侧引气。
测试期间和测试后,左右发动机引气开关将自动关闭。
稍后我们将不得不重新打开它们。
7.(兼)将电池开关切换到关闭(单击鼠标左1a1b2键),然后再切换到打开(单击鼠标右键)以倒带测试音频磁带。
或者,您可以等待10秒钟,让磁带倒带。
弹射座椅未启用弹射座椅已启用8.(兼)左键点击并保持“B通道”(AFT)位置的“消防和引气测试开关”,启动探测回路B /的消防引气测试。
在释放开关之前,等待音响警告序列完成。
开关将弹回中间位68在试验期间,防火和放气试验将点亮所有防火和放气注意事项。
置。
驻车制动器显示在默认接合位置。
接合它的方法是通过左键单击控制杆在垂直驻车位置旋转控制杆,然后通过滚动鼠标滚轮拉动控制杆。
60启动程序9.确认在备用警告面板上看不到APU ACC(辅助动力装置蓄能器)警告。
10.左击APU开关,将其设置为ON(前进),启动APU(辅助动力装置)11.确认APU ACC警告在备用警告面板上可见,并且APU开始绕线。
在现实生活中,机长(PC)会给你这个确认,但在分布式控制系统中,你可以只听APU的假脱机声音。
12.一旦APU绿灯亮起,APU就开始运行。
APU将为F404发动机的气动ATS(空气涡轮启动机)提供气压。
13.首先通过使用右键单击设置发动机曲柄开关–R(右)起动右发动机。

敌俺识别应答机用法:选择一个雷达目标,按I,若几乎无声就是敌机,出现“嘟”声就是友机。
附本人原创攻略一份F/A-18大黄蜂沙漠风暴行动推荐普屏使用鼠标的同志们请先到Opinion选项之中将操作模式由摇杆(joystick)改成鼠标(mouse)本文只介绍常用按键和战术,其余的按键请参考《F/A-18沙漠风暴行动飞行员手册》esc暂停p暂停Ctrl q退出任务Shift esc退出任务Ctrl n改变时间( 6h)Ctrl f加快四倍速度或归还原来速度。
Ctrl w 变为扭曲时间(12X速度)或归还原来时间。
不过有限定要帮求:飞机在有动力飞行,自动驾驶仪打开并调整为HSEL/BALT/RALT模式,飞机没有bingo fuelCtrl s截图控制方法鼠标控制方向,具体方向请自己体会。
加速- 减速Space 或 v 在地面上刹车(假如速度为零而你仍按着space/v,就会把车刹住,你假如想继续前进就再按一下space/v。
在指示灯处有提示后按h收回尾钩)Shift g 请帮求清场。
Shift t 请帮求起飞。
Shift o 询问任务完成情况。
Backspace 开车/加力。
Shift e 弹射跳伞。
(救命用!新手切记!)f 收放襟翼。
g 收放起落架。
(起落架和襟翼到了一定的高度和速度会自动收回,但在未收回前浪费的机动性和油料很让人心疼。
)L 着陆指示器(提前用t键选好机场),按下后即会出现一道横线和一道竖线,用竖线对准跑道,用横线对准机场前端,即可做到较完美的降落。
在开启无线电降落指导器之后,按Shift l得到语音指导。
i 敌俺识别应答机用法:选择一个雷达目标,按I,若几乎无声就是敌机,出现“嘟”声就是友机。
a 自动驾驶。
Shift a 改变自动驾驶状态: {(无)普通{#ATTH 高度保持包括这些 ----{#HSEL 机头方向保持,(会按照路径点走){#BALT 海拔高度保持 {#RALT 雷达高度(即距地面距离,在伊朗山地表现明显)保持 {#CPL 降落自动驾驶(不可以用于航母,提前应用T键选好机场)w 改变自动驾驶仪的目标点。

DCSFA-18CHornet大黄蜂战斗机中文指南11.2机载对抗分发系统ARC-210收音机-简介ARC-210无线电在30兆赫到399.975兆赫的频率范围内提供调幅和调频(AM&FM)的传输和接收。
大黄蜂安装了两个无线电:COMM1和COMM2。
它们是独立的,每个都有20个预设频道。
预设频率在任务编辑器中设置。
您可以通过前端控制(UFC)来控制收音机。
UFC:前端控制通信交换开关向上=选择通讯1164向下=选择通讯2UFC:前端控制OSB 1至5射频显示ARC-210无线电-UFC要打开收音机,旋转comm1和comm 2的音量旋钮。
要更改预设频率,请旋转comm1或comm2通道选择器旋钮。
要设置无线电选项,请按OSB(选项选择按钮)切换每个选项的参数。
要传输到comm1或comm2,请使用““COMM AFT: Select COMM2”和“COMM FWD: Select COMM1”绑定。
选项选择按钮(OSB)1GRCV:防护接收选项选择按钮(OSB)2COMM1音量旋钮切换静噪。
“:”表示静噪激活。
选项选择按钮(OSB)3切换密码模COMM2音量旋钮式:PLN(plain)、CIPH(cipher)和DLY(delay)。
不是模拟的。
选项选择按钮(OSB)4COMM1通道选择器COMM2通道选择器选择AM或FM频段。
“:AM”表示选择了AM频率,“:FM”表示选择了FM频率。
仅当所选频率在上一页所示的FM/AM波段内时,此选项才可见。
选项选择按钮(OSB)5菜单按钮已选择COMM1预设频道M:手动1至20:预设频道G:防护装置(243.000)C:单信道地面和机载无线电系统(SINCGAR)的提示信道S:海运(SEA)已选择COMM2预设频道M:手动1至20:预设频道G:防护装置(243.000)C:单信道地面和机载无线电系统(SINCGAR)的提示信道S:海运(SEA)165。

航母着陆情况1回收海拔高度5.当从上风航段左转到侧风航段(第2边)时,试着拉一些G,这是你的空速的1%(即如果以350节的速空速度前进,3.5G转弯),同时保持你的速度矢量在水平线上。
这应该使你的顺风段与跑道保持1.2海里的距离。
6.在600英尺高度飞行时减速至250节7.放下起落架操纵杆-DOWN8.襟翼操纵杆-FULL满(DOWN下)9.当你进入顺风航段时,通过使用升降舵配平(非常重要)和油门输入,在平视显示器上的“E”支架中间设置速度矢量,将速度减慢到开启速度AOA。
我再强调也不够:一定要把你配平好。
你应该达到大5约140-150节空速的AOA(迎角)到8.1度左右。
如果你没有调整到8度,你的AOA将关闭,你将战斗的电传系统一直到着陆。
确保保持速度矢量在地平线上,保持600英尺的高度。
如果攻角正确与否,AOA索Gs速度矢量引器也会给你一个很好的参考。
AOA指示器显示合适攻角水平线79速度矢量“E”型支架893降落点航母着陆情况1回收一旦船在顺风航(第3边)段逆风飞行,当你的机翼与船的降落点相遇时,开始你的进近转弯。
Approach Turn94航母着陆情况1回收10.当转向基段(第4边)时,开始30度的倾斜,同时保持速度矢量和E括号刚好在地平线以下。
保持600英尺的高度需要你不断调整油门。
忘记你的空速吧:只需专注于保持高度和倾斜角度。
11.当你和船排成一排时,你将进入“凹槽”(最后短段)(第5边)。
12.一旦两翼齐平,你通常会“叫球”。
示例:“403,黄蜂球,3.0”。
(黄蜂的侧号,飞机类型,“球”,燃料状态/剩余重量为数千磅)。
LSO(着陆信号官)会用“收到球”回应,然后给你正确着陆的修正。
海拔高度空速(忘了吧!)水平线1011速度矢量速度矢量E支架倾斜角95 迎角(速度)迎角(速度)航母着陆情况1回收13.当进入槽(最终第5边),如果你设置正确的转弯,速度矢量应该与船的胯部对齐。
这被称为“定位甲板”,你不应该把它作为陆地的参考。

波音FA-18先进超级大黄蜂舰载攻击战斗机
在洛克希德F-35闪电IⅡ系统全面运行之前,波音公司提供其先进的超级大黄蜂作为临时解决方案。
18E/F“超级大黄蜂”系列,项目名称为“先进超级大黄蜂”。
将采用模块化组件改装现有的“超级大黄蜂”机身,以降低其雷达信号和整体轮廓,同时满足USN预算。
在机身下方布置一个封闭的武器吊舱,使用保形油箱(CFT)和表面的全新涂层。
总体上,机身基本保持不变,并与之前使用的所有硬件和软件系统兼容。
F/A-18系列是经验丰富,经过验证的飞行系统,简单地修改对于美国海军来说是一个诱人的选择。
波音公司修改后的“超级大黄蜂”将在2013年中(或年底)开始试飞。
美国海军运营部门(OPNAV)积极支持波音的计划,并向波音公司租用了USN超级大黄蜂生产模型,用于工作。
将在波音公司位于密苏里州的圣路易斯工厂进行,然后在美国海军位于马里兰州的Patuxent River NAS进行测试。
该测试旨在收集数据,以评估“隐形”超级大黄蜂的可行性,这也将大大延长这架飞机的使用寿命(预计将服役到2040年)。
开发的武器吊舱将位于中央机身下方,最多可容纳四枚导弹(或类似物品)。
保形油箱不仅可以延缓机身很低的特征,还可以将作战半径从标准的390海里增加到大约510海里。
驾驶舱将进行轻微改造,包括增加触摸屏显示器,预计发动机将升级通用电气F414涡轮风扇发动机。

导航介绍F/A-18中的导航主要是通过HSI(水平状态指示器)完成的,它是一个自上而下的视图,在任务编辑器中显示您的航向和导航辅助设备,如塔康(战术空中导航)信标和飞行前输入的航路点。
HUD (头上显示器)UFC(前向控制)HSI(水平位置指示器)SUPT(支持)页面移动地图(带HSI覆盖)1移动地图–DMS(数字地设置)移动地图只能在AMPCD(高级多用途彩色显示器)上看到。
然而,其大部分功能将在“HSI”部分中介绍。
HSI模式子菜单地图比例尺T-UP选项选择航迹向上(向上与飞机航向对N-up选项选择“北向上”地图(160/80/40/20/10/5)齐)地图方向方向真实速度(kts)地面速度(kts地图:启用或禁用移动地图D CTR选项选择地图偏心飞机图标将移动到屏幕底部,并隐藏HSI覆盖HSI模式菜单飞机(俯视图)SLEW:地图回转(尚未启用)172HSI (水平位置指示器) 数据选择数据显示模式(信息有关被跟踪飞机/航路点/塔康的信息)航路点数据方向(度)距离(海里)到达航路点的时间(分:秒)HSI页面几乎是最重要的导航工具。
基本上,它是您的飞机、飞行计划和导航辅助设备的自上而下视图,您可以通过按两次菜单OSB(选项选择按钮)来选择它。
HSI标度(160/80/40/20/10/5)选择标记点(MK)位置保持源选项1TCN选择TACAN 跟踪模式1 ICLS选择仪表着陆系统跟踪模式Ownship空速(kts)选择的航路点(框选)Waypoint Increment HSI模式菜单选择的航路点(航路点1)VEC:不起作用地面速度(kts)Waypoint Decrement3 飞机(俯视图)WPDSG:将当前航路ACL:不起作用点指定为目标航路点(TGT)传感器:雷达在距离和方位上探测到的空中目标显示在HSI上。
TimeUFC:设置时钟时间SEQ#: 选中并框选后,序列的所有航路点显示在HSI上,虚线依次连接它们。

FA-18“大黄蜂”和“超级大黄蜂”绰号的由来对于F/A-18战斗机为什么得到“大黄蜂”的绰号,书中的图文做了一番解释。
我们先参看下面两张照片。
这是航母上的地勤人员正在F/A-18的主起落架旁工作。
起飞后,这对主起落架会向内侧和后侧转动,收入舱内。
而且它们的“弹性”非常好,在战斗机起飞离地后,随着承力降低,两副起落架会自然地悬垂在机身下。
而黄蜂在飞行时,也是把它的足自然地悬垂在身下。
这正是“大黄蜂”这一绰号的由来。
也许以前有人会觉得,该机叫“大黄蜂”是因为它尾部的拦阻钩,放下后类似黄蜂那蜇人的尾针。
舰载机尾部基本上都有拦阻钩,凭什么它能叫“大黄蜂”呢?也许还因为F/A-18的机身有点圆润,机翼后掠角不大,比F-14等看起来更像昆虫的身躯。
但现在,这个绰号显然有了更准确的解释。
F/A-18的外形特征也不仅仅在主起落架上,可为什么选它?看看它最初的原型机,以及它为什么成为F/A-18,我们就不难理解主起落架在其中的重要地位。
可以看出,YF-16的起落架是“外八字”,从机腹中心向两侧下方伸展。
而YF-17的起落架,是从机腹侧面靠近翼根处垂直地伸下来。
下面这张照片可以看得更明显。
结合前面F/A-18“大黄蜂”的照片很容易看出来:起落架张开成“外八字”,是YF-17嬗变成“大黄蜂”的一个重要环节。
书中对此有比较详细的介绍。
“大黄蜂”的原型机是YF-17,在空军的轻型战斗机项目中败给了YF-16。
上图就是停在地面的这两种原型机美国海军在成功研制并装备F-14“雄猫”战斗机后,开始寻求下一个重要的舰载机采购项目,“海军战斗-攻击机”(NFAX)。
这种飞机将和F-14搭档,取代A-4“天鹰”、A-6“入侵者”、A-7“海盗”Ⅱ和F-4“鬼怪”Ⅱ战斗机。
而且在1973年,美国国会还要求海军未来采购一种低成本的多用途舰载机,不仅取代上述清单中的老旧机型,还将成为F-14的替代者。
针对国会的这种要求,格鲁曼把F-14做了简化处理,麦道以F-15为基础改进出一种舰载型号,可都没能达到海军提出的低成本要求。

非制导炸弹(MK-82)
CCIP释放模式
3
1.主武器开关–武装(UP)
2.主模式–A/G
3.进入SMS(储存管理系统)页面
4.点击所需炸弹选择它(82B)
5.我们将通过选择预设程序来创建一个武器交付程
序。
用PROG旁边的OSB切换程序。
我们将使用程
序1。
5 2
步骤用于更改所选站点1
126
非制导炸弹(MK-82)
CCIP释放模式7b
6.单击MODE旁边的OSB,然后单击OSB选择CCIP模
式
6b
7.单击MFUZ(机械引信)旁边的OSB,然后
按NOSE OSB旁边的。
8.单击EFUZ(电子引信)旁边的OSB,然后按DLY1旁
边的OSB,以获得延迟(如果需要),否则设置
为INST。
9.单击DRAG(阻力)旁边的OSB,然后根据炸弹类
型按下FF(自由下落低阻炸弹)或RET(延迟引
信)旁边的OSB。
9b
6a
7a
8a
8b
8a
127。
AGM-84H SLAM-ER/AGM-154 JSOW/GBU-29/30/31 JDAM GPS 制导武器这三个系列的武器都使用最新的全球定位系统制导系统,同时也具有非常类似的HUD/SMS显示和控制。
AGM-84H SLAM-ER 是最初基于捕鲸叉反舰导弹的防区外攻击导弹的升级版本。
“ER”代表扩大的反应,这就意味着它比最初的SLAM型号具有更大的射程和准确性。
AGM-154 联合防区外武器(JSOW)被定于代替美国空军的GBU-15 和AGM-130 页就是美国海军的Walleye。
它是一种固定使用1000磅GP战斗部或集束子弹头的滑翔类武器。
GBU29/30/31联合直接攻击弹(JDAM)一个可使用1000和2000磅GP战斗部或2000磅渗透战斗部的武器家族。
JDAM被用于铺路石系列激光制导炸弹系列的补充武器,并总有一天将完全取代这个系列的武器。
GPS 制导武器HUD 符号这些武器的各个类型都使用相同基础的HUD符号:×上升操作线(仅在SLAM-ER):上升操作线提供到达选择的发射投放高度的提示。
×方位操作提示:方位操作提示提供一个相对于指定目标的最佳发射点的操作。
×在域提示:指出选择的武器发射符合的所有条件,和下面在GPS制导武器SMS MDI页面中描述的相同。
×武器选择/状态指示:在这个位置显示选择的武器类型。
×到达发射点的时间(TTLP):TTLP指出到达选择的武器的理想发射点的时间。
如果计算的TTLP 超过99 秒,那么显示将限制在99 秒直到TTLP 变得小于99 秒。
×到发射点距离(LP):以海浪表示的到达理想发射点的距离。
GPS 制导武器SMS(挂载)MDI 页面符号这些武器的各个挂载页面选项基于捕鲸叉挂载页面格式,彼此之间非常类似。
60×程序选择(PROG):这个选项按次序在各个可用的程序之间轮流。

指定正确的轴很重要。
以下是一些提示。
注意:在你的控件中,确保你检查你的“修剪”控件,因为游戏的默认版本将你的修剪帽设置为更改你的视图,而不是修剪飞机。
由于你们大多数人可能已经装备了一个跟踪器,我建议你们确保装饰帽开关设置正确。
要指定轴,请单击轴指定。
您也可以在上滚动菜单中选择“轴命令”。
要修改曲线和轴的灵敏度,请单击要修改的轴,然后单击轴调整。
绑定以下轴:俯仰(死区,饱和x1,饱和1,曲率15)滚动(死区,饱和x1,饱和1,曲率15)方向舵(死区为,饱和为1,饱和为1,曲率为1)推力控制发动机转速左/右车轮制动器注意必须通过轴调谐菜单设置俯仰和滚转轴中的小死区。
为什么?因为如果操纵杆没有完全对中,自动驾驶仪将无法接合,而且根据定义,大多数操纵杆没有完全归零(甚至是Thrustmaster Warthog)。
如果你没有设置死区,你会遇到无法启动自动驾驶仪的危险,因为即使位置偏移可以忽略不计,你的操纵杆也会被检测到“没有完全居中”。
6你需要的映射布撒器开关(后)(右侧的灰色按钮)配平推配平右翼下配平拉配平左翼下选择响尾蛇选择AMRAAM 缓慢放大TDC-按下武器投放慢慢缩小选择麻雀选择枪保持架/打开按钮枪触发:第二止动传感器控制开关前传感器控制开关右通讯开关:通讯1传感器控制开关后传感器控制开关左通讯开关:通讯2雷达仰角控制轴未指定/前轮转向开关速度制动器缩回自动驾驶仪/前轮速度制动器伸出T DC前TDC右TDC后TDC左转向分离(拨杆)+前束制动器(在踏板上映射)7你需要的映射Redkite还有一个很好的外形,你可以使用它更接近真正的大黄蜂棒和油门设置。
链接:https://youtu.be/iKLrnJpc8I4+前束制动器(在踏板上映射)。

雷达“铁十字”显示只要雷达发射没有操作,铁十字就出现在各个A/A或A/G模式中的雷达页面的左下角。
显示铁十字指示的状况如下:•重量落于机轮。
•EMCOM。
•雷达静默(SIL)•雷达没有运作(OPR),比较典型的为战斗损伤。
A/A 雷达子模式A/A 雷达是你用于侦测、跟踪、和攻击空中目标的主要的传感器。
它有三个类型的子模式:搜索、边跟踪边扫描(TWS)、和单目标跟踪(STT)。
各个子模式的使用原理基于A/A雷达显示。
基本雷达页面符号在MDI A/A页面上的基本雷达目标符号:×飞机空速&马赫数:你飞机的当前空速和马赫数。
×雷达敏感度指示器:较低的值指出简化的目标侦测、捕获和跟踪距离。
敏感度指示器在高混乱区减少,比如当飞行在低高度或位于存在强烈干扰时。
×地平线:再次显示在HUD上的地平线。
×天线高低角刻度和脱字符:天线高低角刻度指示天线高低角的±60°范围。
在天线高低角的±30°范围内刻度的增量为10°,在完全的±60°范围内可以显示雷达显示格式的全部战术区域。
高低角的脱字符在刻度上移动以指出当前的天线高低角。
×目标差异高度:目标高于(正数)或低于(负数)你的飞机的高度,以千英尺表示。
×雷达B-sweep:B-Sweep线指出当前的雷达天线的方位,它在雷达屏幕上从一边到另一边,往返穿越进行天线的扫描。
×雷达子模式:(L1)仅在RWS、VS和TWS(不可在STT)子模式中可用,同时提供选择雷达子模式的方法。
默认为RWS。
×目标航向:显示L&S目标的目标航向。
×雷达操作状态:基于当前的雷达状态,显示下面之一:•STBY:SIL 模式命令,雷达处于备用状态(没有发射)。
•OPR:正常运作。
•RDY:雷达损伤(游戏没有准备)。
×高低扫描线数设置:(T1)在各个可用的雷达天线高低扫描线数设置之间切换。

×SMS MDI (挂载)热键:显示MDI挂载页面。
×HUD MDI热键:显示MDI HUD页面。
×雷达高度计(RALT)低高度警告:在高亮和非高亮之间切换。
当高亮时,上下箭头可用。
×上箭头:以每次50英尺增加低高度警告级别。
×下箭头:以每次50英尺减少低高度警告级别。
×CNI选项:返回顶级CNI格式。
×跟踪FLIR MDI热键:显示MDI跟踪FLIR页面。
×EW MDI热键:显示MDI EW页面。
UFC TACAN×选择的TACAN位置:在UFC文本区显示选择的TACAN信道号码。
×TACAN信道列单:显示在任务构造中的TACAN信道和它们的联合文本ID定义。
一共显示九个信道,同时如果在任务中有九个以上的TACAN信道定义,那么列单必需用上下箭头滚动显示。
×选择的TACAN现代高亮条:选择的信道为高亮,同时这个信道也显示在文本区。
דMore”指示:如果在任务中有九个以上的TACAN信道定义,“MORE…”将会出现,指示当前滚动列单顶部、底部或顶部和底部还有没有显示的信道。
×下箭头:将TACAN信道列单上的高亮条向下移动。
×TACAN (TCN)选项激活:在TACAN UFC子页面中这个边框高亮。
×上箭头:将TACAN信道列单上的高亮条向下移动。
UFC 自动驾驶自动驾驶有两个模式:机组人员负担减轻和数据链接。
机组人员负担减轻模式由基本自动驾驶、滚转姿态锁定、地面轨迹锁定、大气高度锁定、雷达高度锁定、和链接操作(导航点、TACAN、和目标)组成。
数据链接模式是自动航母降落(ACL)的运用。
如有任何自动驾驶模式被激活,A/P 将呈现角落高亮。
在开启任何自动驾驶模式之前,飞机的倾斜角必需小于等于70°,俯仰度必需小于等于45°,同时在自动驾驶子页面中必需选择一个模式。

F18舰载机模拟起降攻略第一关:航母起飞(摁一下当中的红点),陆地跑道着陆,停到机库中(如果顺着指引降落的就是跑到尽头左转的那个机库)着陆时速度控制在214km以下第二关:(1)从机库开出,起飞(加速到180km+抬一下手机就会起飞)我偷懒直接机库开出的灰色地面上起飞,速度提高到340km后油门到最低或者保持1/4的地方。
(2)开出大概0.7~1.0的样子(小地图距离),空中转弯360度,降落前保持高度200~400ft,快降落了到70ft,速度在240~280km,降落前不要过大幅度的转弯。
(3)对准跑道,触地油门到最大,快到跑到尽头了和起飞一样抬一下手机。
(4)重复步骤2、3,逆着跑到降落也可以。
(5)转弯360度,顺着跑道降落,高度70ft左右,速度在180到214km之间。
一边减速一边降低高度。
接触跑道后一直减速到30~60ft,跑道尽头转弯到出来的机库前的空地上停下来就可以了(切记不要进去)第三关:(飞机已经在跑道上了)加速,起飞,顺着第一关的路线回到航母,降落在航母上,降落航母一定要顺着地图指引,否则机毁人亡......可以飞到航母后面的山附近,转弯,对准跑道,(高度多少忘了,反正差不多平飞过去,留个15度的夹角降落)速度在200左右,看准跑道上的4根白线,那是减速绳,如果挂住了你的飞机一会就会停下来(不会超过控制塔),如果不幸没挂住,那么马上加速从跑道另一头起飞转个弯绕道后面再来一次。
如果你撞上了航母,那就要从头来一遍了。
【主菜单左面第一个是停到飞机场的模拟练习,第二个是任务,第三个是停到航母上的模拟练习,你可以先练习一下,在做任务】第四关:航母起飞,顺着地图指引,高度不要超过1000ft都没事,你看到那个高度和雷达图标变成红色那就马上降低高度,否则任务失败,这关可能是收集情报的那种,飞到第一个任务地点了,不要降落,速度在230km左右,低空盘旋,等到屏幕上的图标进度条满了,新任务出来了,在加速离开,不过也不要开太快。

MDI –导航FLIR 相机(NAVFLIR)页面MDI NAVFLIR 页面显示和HUD 一样的NAVFLIR 视频图像。
FLIR 图像沿着飞机的孔径保持固定而不作回转。
它没有放大HUD的FLIR图像的能力。
如果没有挂载NAVFLIR吊舱,则HUD 和MDI 的NAVFLIR 显示将不能使用。
×NAVFLIR运作状态:基于当前的TFLIR状态将显示下面之一(在显示屏左上角,图中未显示):•OPR:正常运作。
•RDY:损伤或没有在飞机上挂载。
×视频级别调整:(L1、L2)通过选择上下调整箭头调整级别。
级别值在LVL选项边指出。
范围从0(最小)到9(最大)。
默认值是4。
×HUD符号:在默认下,HUD符号显示在NAVFLIR相机视窗的顶部。
×NAVFLIR极性:(B2)选择白热(WHT)或黑热(BLK)视频极性。
这个按钮在两个选项之间切换。
×混乱抵制选项:(B4)允许在NAVFLIR页面上移除HUD符号。
.MDI –目标FLIR 镜头(TFLIR)页面目标FLIR在jane’s的F/A-18中基于海军的ATFLIR(先进跟踪FLIR),它一直在发展测试中但也是预定的F/A-18E的配备。
ATFLIR是美国LANTIRN系统的更先进的版本。
这是一个很明显的问题,但还是不要忘记,ATFLIR吊舱必须先被挂载在你的飞机上以可以使用。
ATFLIR(TFLIR)有两个主要模式,空对空(A/A)或空对地(A/G)。
ATFLIR 在A/A 主模式中的运作在的A/A跟踪FLIR部分描述。
参见战斗:。
A/G ATFLIR模式在A/G跟踪FLIR部分描述。
参见战斗:。
MDI –自动航母降落(ACL)系统页面ACL MDI 页面使用了一个SA MDI 的变型,但仅在NAV 主模式里可用。
你往往在航母归航时选择。
它提供速度、高度和航向指示。
当ACL操作在HSI上选择时,自动驾驶可以链接这个系统来提供完全解放双手的降落能力。


M61A2机炮(空对地)1.主武器开关–武装(向上)2.主模式–A/G3.进入SMS(储存管理系统)页面4.选择枪(文本应框选)5.选择枪子弹选项(MK-50或PGU-28)6.设置炮速选项(HI=6000发/分钟,LO=4000发/分钟)7.将枪模式设置为CCIP(文本应框选)准星CCIP模式7火炮十字线选择和武装的枪24还剩枪弹1139 56M61A2机炮(空对地)8.在目标上设置枪十字线的中心,等待“IN RNG”(在范围内)提示出现。
9.挤压枪扳机(空格键)10.一旦你完成了你的跑步,分离X出现,停止攻击并从目标挥手离开。
范围内提示分离XM61A2机炮(空对空)(漏斗/无雷达跟踪)1.主武器开关–武装(向上)2.雷达开关–关闭3.武器选择开关——A/A枪,或“LShift+X”4.主模式开关将自动设置为A/A剩余枪弹5.进入SMS(储存管理系统)页面,选择枪子弹选项(MK-50或PGU-28子弹)6.设置炮速选项(HI=6000发/分钟,LO=4000发/分钟)45传感器控制开关后/前/左/右126武器选择开关GUNS/SIDEWINDER/SPARROW/AMRAAM 1413M61A2机炮(空对空)(漏斗/无雷达跟踪)7.飞到目标上方1000英尺范围提示点或2000英尺范围提示点。
一旦1000英尺(或2000英尺)的范围提示点在飞机上,其翼展适合枪漏斗,你现在在范围内。
8.挤压枪扳机(空格键)枪十字1000英尺范围提示7火炮漏斗2000英尺范围提示选择和武装的枪8剩余枪弹142剩余枪弹M61A2机炮(空对空)(雷达跟踪)1.雷达开关-操作2.主臂开关–臂(向上)453.武器选择开关——A/A枪(AFT),或“LShift+X”4.主模式开关将自动设置为A/A5.进入SMS(储存管理系统)页面,选择枪子弹选项(MK-50或PGU-28子弹)6.设置炮速选项(HI=6000发/分钟,LO=4000发/分2 钟)7.当选择了A/A火炮并且雷达在运行时,雷达自动切换到ACM(空战机动)GACQ(火炮自动采1集)模式。

AN/APG-73空对空雷达
空对空雷达使用了一个B-范围表示,这是一个自上而下的视图什么是在你面前。
B-Scope (Top-Down) Representation
您可以使用TDC或油门指示器控制器旋转雷达并
锁定目标。
雷达数据可显示在RDR ATTK TAC页面和HUD(平
视显示器)上。
接触
传感器控制开关用于设置选择的显示
器(左DDI、右DDI、下AMPCD或HUD)或您将
使用的雷达模式。
TDC
传感器控制开关
后/前/左/右
节气门指示器控制器
后/前/左/右/下压
天线仰角
雷达电源
114
AN/APG-73空对空雷达
黄蜂的雷达有160海里的射程,140度的水平弧和可定制的可变垂直弧。
您可以控制雷达扫描模式(条),这将给您一个更窄或更宽的扫描区域。
范围:160海里总方位角:140度
TDC旁边的数字对应于目标指示器距离处雷达波束顶部和底
部的高度(千英尺)。
当你移动目标指示器越来越近,你会
看到数字的变化。
实际的应用是雷达不会检测到这些高度以
上或以下的目标,这就是为什么你需要上下旋转雷达天线来
做一个完整的搜索。
注:范围不按比例
TDC
Range: 160 nm
115。

dcsf18操作手册
DCS F-18操作手册主要包括以下步骤:
1. 启动电源:接通电源开关,将电瓶开关拨至ON。
2. 启动APU(辅助动力装置):打开APU开关,待右边的绿灯亮起。
3. 启动引擎:先启动右引擎,待转速值达到25-30间,将右油门前推。
然后启动左引擎,操作与右引擎相同。
4. 重置放气装置旋钮:顺时针转动360度。
5. 打开导航系统:打开INS导航系统至GND/CV位(地面/航母)。
6. 打开显示仪表:打开左右DDI和HUD,再将BLKLVL开置ON。
7. 设置高度:将高度设置为雷达高度。
8. 解锁水平仪,重置雷达预警到200/80(地面/航母)。
9. 解除报错警报:将报错按扭(MASTER CAUTION)连续点击2次。
10. 配平飞机:进行配平归零操作。
11. 启动电子干扰系统:将ECM电子干扰系统调至STBY待机档位(4分钟后调BIT档位)。
12. 检查飞机状态:检查襟翼是否处于收起状态,机翼是否处于打开状态,驻车制动开关是否解锁,以及地勤人员是否已移除轮挡。
请注意,这只是一个简单的操作流程,实际操作中可能会因游戏版本和具体设置而有所不同。
建议参考游戏内的具体说明或寻求专业人士的帮助。

FCS:飞行控制系统G限制器F/A-18有一个“G限制器”,可以覆盖飞行控制,以防止超过任何负载限制。
主要的飞行控制包括副翼、双方向舵、差速/总前缘襟翼、差速/总后缘襟翼和差速/总稳定总重量为32357磅时,飞机设计载荷极限为+7.5克。
器。
定位控制面。
杆和舵的感觉是由弹簧筒提供的。
虽然操纵杆和方向舵踏板没有气动反馈,但飞行控制计算机将操纵面偏差与飞行员总重量低于44000磅时,正对称指令限值根据燃料状态和储存负荷进行计算。
总重量超过44000磅,正对称指令限值固定在+5.5 g。
输入作为飞行条件的函数进行调度,以模拟这种影响。
负对称指令限值在所有总重量和仓库载荷下固定为-3.0 g。
注意:在操纵杆接近全后位置的情况下,瞬时按下拨杆开关,可以超越G限位器。
然后命令限位G增加33%。
显示G-LIM OVRD警告,主警告灯和提示音亮起。
通常,液压执行器的输入由两台飞行控制计算机(FCC A和FCC B)通过全权限控制增强系统(CAS)提供。
直接电气链路(DEL)自动备份CAS。
DEL通常是一个数字系统,但有一个用于备用副翼和方向舵控制的模拟模式。
如果数字DEL失败,机械连杆(MECH)会通过从驾驶杆到稳定执行器的直接机械输入自动提供滚转和俯仰控制。
机械绕过飞行控制计算机和稳定执行器伺服阀。
飞行控制偏差可在DDI FCS(飞行控制系统)页面上监控。
本页监控所有四个FCS通道,“X”表示子系统通道故障,或飞机在地面停留一段时间后,控制面下降。
在这种情况下,FCS 重置按钮将重置这些故障。
拨杆开关(前轮转向分离、自动驾驶分离和G限制器超越开关)107液压系统飞行控制系统功能108SRM(自旋恢复模式)旋转恢复系统在接合时,将飞行控制置于旋转恢复模式(SRM),使飞行员在没有任何控制面互联的情况下获得副翼、方向舵和稳定翼的全部权限。
前缘襟翼被驱动到33度以下,后缘襟翼被驱动到0度。
SRM还将为您提供一个从旋转中恢复的操纵杆方向如果自旋恢复开关处于正常状态,则自旋恢复模式在以下情况下启用:空速为120+/-15节持续、非命令横摆率驾驶杆按DDI旋转恢复显示屏上指示的方向放置。
MDI –导航FLIR 相机(NAVFLIR)页面
MDI NAVFLIR 页面显示和HUD 一样的NAVFLIR 视频图像。
FLIR 图像沿着飞机的孔径保持固定而不作回转。
它没有放大HUD的FLIR图像的能力。
如果没有挂载NAVFLIR吊舱,则HUD 和MDI 的NAVFLIR 显示将不能使用。
×NAVFLIR运作状态:基于当前的TFLIR状态将显示下面之一(在显示屏左上角,图中未显示):•OPR:正常运作。
•RDY:损伤或没有在飞机上挂载。
×视频级别调整:(L1、L2)通过选择上下调整箭头调整级别。
级别值在LVL选项边指出。
范围从0(最小)到9(最大)。
默认值是4。
×HUD符号:在默认下,HUD符号显示在NAVFLIR相机视窗的顶部。
×NAVFLIR极性:(B2)选择白热(WHT)或黑热(BLK)视频极性。
这个按钮在两个选项之间切换。
×混乱抵制选项:(B4)允许在NAVFLIR页面上移除HUD符号。
.
MDI –目标FLIR 镜头(TFLIR)页面
目标FLIR在jane’s的F/A-18中基于海军的ATFLIR(先进跟踪FLIR),它一直在发展测试
中但也是预定的F/A-18E的配备。
ATFLIR是美国LANTIRN系统的更先进的版本。
这是一个很明显的问题,但还是不要忘记,ATFLIR吊舱必须先被挂载在你的飞机上以可以使用。
ATFLIR(TFLIR)有两个主要模式,空对空(A/A)或空对地(A/G)。
ATFLIR 在A/A 主模式中的运作在的A/A跟踪FLIR部分描述。
参见战斗:。
A/G ATFLIR模式在A/G
跟踪FLIR部分描述。
参见战斗:。
MDI –自动航母降落(ACL)系统页面
ACL MDI 页面使用了一个SA MDI 的变型,但仅在NAV 主模式里可用。
你往往在航母归航时选择。
它提供速度、高度和航向指示。
当ACL操作在HSI上选择时,自动驾驶可以链接这个系统来提供完全解放双手的降落能力。
命令空速(CMD A/S)、命令高度(CMD ALT)和命令下降速率(CMD ROD)指示在MDI ACL页面上和其它不同状态信息一起显示。
另外ACL信息也显示在HUD上。
ACL 有两个运作模式,模式1 和模式2。
这两者之间的差别在于自动驾驶是否链接到ACL 系统。
在ACL模式1时是链接到自动驾驶模式的。
而当在ACL模式2时你将跟着ACL命令信息进行手动降落。
×命令空速(CMD A/S)窗口:显示上载的命令空速。
这是你在你的降落空中交通图中你的飞机必需保持的速度位置。
×命令高度(CMD ALT)窗口:显示上载的命令高度。
这是你在你的降落空中交通图中你的飞机必需保持的高度位置。
×命令下降速率(CMD ROD)窗口:显示上载的命令下降速率。
这是你在你的降落空中交通图中你的飞机必需保持的下降速率位置。
×命令航向指示:在罗盘的外边上用双V型符号显示上载的命令航向指示。
这是你在你的降落空中交通图中你的飞机必需保持的航向位置。
×ACL系统状态/模式窗口:显示当前的ACL模式或系统状态。
下面的相互排斥的信息有可能出现:
•ACL 1:ACL 模式一(自动驾驶链接,非双手降落)开启。
•ACL 2:ACL 模式一(自动驾驶没有链接,仅有位置指示)开启。
•ACL N/A:ACL 没有机会(最大的可能是由于飞机的损伤)。
×10秒信息窗口:在你的飞机离着地约12.5秒时显示“10 SEC”信息。
在降落空中交通图的这
个点上,舰船机动被附加到ACL指示。
×TILT信息窗口:如果你的飞机飞行在ACL空中区域之外或者如果你的飞机没有太久的ACL运作能力(特别是由于上面描述的飞机损伤),将显示这个TILT信息。
×ACL组1信息窗口:显示下面相互排斥的信息:
•NOT CMD:指出你不在ACL 空中区域之内或你的飞机没有ACL 降落的可能。
•LND CHK:指出你的飞机在ACL 空中范围之内但没有配置降落(放下起落架和着舰钩)。
•ACL RDY:指出你在ACL 控制盒之内、配置了降落、并准备链接(通过自动驾驶)。
•CMD CONT:指出ACL 系统在你的飞机的控制中。
•W/O:指出你将停止进场并在周围盘旋。
当这个信息被认可时,ACL 系统将从自动驾驶中脱离链接。
前上方控制器
前上方控制器(UFC)位于座舱的中间,HUD的下面。
在F/A-18的真实的UFC是一个以红外触敏屏来操作输入的活跃的矩形液晶显示仪。
另外,UFC还可用于显示任何MDI格式。
在游戏中我们用鼠标模拟了这个触敏屏,并允许UFC象真实的UFC那样显示MDI格式。
UFC也用于设置不同的自动驾驶模式,和显示生活中完全一样。
UFC 有四个可能的格式:顶级(默认)通信、导航、和IFF(CNI)格式;自动驾驶子页面格式;TCN子页面格式;和MDI子页面格式。
顶级CNI格式
×UFC文本区:显示通过键盘区的输入数字直到输入被清除或直到ENT被按下。
×数字区/触摸高亮:当任何触敏屏键盘区项目被“触摸”(左鼠标键按住),选择的按钮高亮。
×清除键:在文本区清除最后的数字输入。
×确认(ENT)键:确认键功能×发射控制(EMCON)按钮:当机会时点亮。
这是一个按下/弹出按钮。
当按下时,所有的发射(雷达发射、ASPJ、ALE-50诱饵)都被禁止。
×MDI页面热键:选择UFC MDI页面显示。
×跟踪FLIR MDI显示热键:在UFC MDI上显示MDI跟踪FLIR页面。
×IFF键:手动询问空中目标。
注意如果是未曾识别的L&S目标将被自动识别。
按下这个键识别所有其它显示在A/A雷达MDI上的空中目标,处理。
时间约为2秒
×EW MDI显示热键:在UFC上显示EW MDI页面。
×TACAN (TCN)显示热键:显示TACAN UFC格式。
×雷达高度计(RALT)低高度告警选择:设置低高度告警级别。
当RALT键盘区选项被选择,它的边缘是高亮的,一个从0-9,999的数值可以通过数字键盘区输入文本区,同时当ENT被选择时,这个值将变成一个新的低高度告警值。
×自动驾驶显示热键:显示A/P UFC。
×仪器导航降落系统(ILS)键:切换仪器导航降落系统(ILS)开启或关闭。
×角落高亮:表示一个系统被“按下”或运作,在顶级CNI UFC格式中在ILS 和A/P键盘区选项中显示。
UFC MDI
×SMS MDI (挂载)热键:显示MDI挂载页面。
×
HUD MDI热键:显示MDI HUD页面。
×雷达高度计(RALT)低高度警告:在高亮和非高亮之间切换。
当高亮时,上下箭头可用。
×上箭头:以每次50英尺增加低高度警告级别。
×下箭头:以每次50英尺减少低高度警告级别。
×CNI选项:返回顶级CNI格式。
×跟踪FLIR MDI热键:显示MDI跟踪FLIR页
面。
×EW MDI热键:显示MDI EW页面。