智能小车速度测量控制系统设计
- 格式:doc
- 大小:614.50 KB
- 文档页数:25
《自循迹智能小车控制系统的设计与实现》篇一一、引言随着人工智能与自动控制技术的快速发展,智能小车已经广泛应用于各种领域,如物流配送、环境监测、智能家居等。
本文将详细介绍一种自循迹智能小车控制系统的设计与实现过程,该系统能够根据预设路径实现自主循迹、避障及精确控制。
二、系统设计(一)系统概述自循迹智能小车控制系统主要由控制系统硬件、传感器模块、电机驱动模块等组成。
其中,控制系统硬件采用高性能单片机或微处理器作为主控芯片,实现对小车的控制。
传感器模块包括超声波测距传感器、红外线测距传感器等,用于感知周围环境并实时传输数据给主控芯片。
电机驱动模块负责驱动小车行驶。
(二)硬件设计1. 主控芯片:采用高性能单片机或微处理器,具备高精度计算能力、实时响应和良好的可扩展性。
2. 传感器模块:包括超声波测距传感器和红外线测距传感器。
超声波测距传感器用于测量小车与障碍物之间的距离,红外线测距传感器用于检测小车行驶路径上的标志线。
3. 电机驱动模块:采用直流电机和电机驱动器,实现对小车的精确控制。
4. 电源模块:为整个系统提供稳定的电源供应。
(三)软件设计1. 控制系统软件采用模块化设计,包括主控程序、传感器数据处理程序、电机控制程序等。
2. 主控程序负责整个系统的协调与控制,根据传感器数据实时调整小车的行驶状态。
3. 传感器数据处理程序负责对传感器数据进行处理和分析,包括距离测量、方向判断等。
4. 电机控制程序根据主控程序的指令,控制电机的运转,实现小车的精确控制。
(四)系统实现根据设计需求,通过电路设计与焊接、传感器模块的安装与调试、电机驱动模块的安装与调试等步骤,完成自循迹智能小车控制系统的硬件实现。
在软件方面,编写各模块的程序代码,并进行调试与优化,确保系统能够正常运行并实现预期功能。
三、系统功能实现及测试(一)自循迹功能实现自循迹功能通过红外线测距传感器实现。
当小车行驶时,红外线测距传感器不断检测地面上的标志线,并根据检测结果调整小车的行驶方向,使小车始终沿着预设路径行驶。
摘要本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程.此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路.本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。
小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能.在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。
关键词:stm32;红外探测;超声波避障;PWM;电机控制AbstractThis experiment mainly analyzes the control system of smart car based on microprocessor STM32F103 system design process。
The composition of the intelligent system mainly including STM32F103 controller, motor drive circuit, infrared detection circuit, circuit of ultrasonic obstacle avoidance。
This experiment adopts STM32F103 microprocessor as the core chip, using PWM technique to control speed and steering gear steering,tracking module is used to detect the black and white, obstacle avoidance module for obstacle detection and obstacle avoidance function, other peripheral extended circuit to realize the whole system function。
智能小车速度测量控制系统设计1.引言在现代工业和交通领域,智能小车被广泛应用于自动化物流、智能仓储以及移动机器人等场景。
为了保证智能小车的正常运行和安全性,速度测量和控制是至关重要的一环。
本文将重点介绍智能小车速度测量控制系统的设计原则和实现方法。
2.设计原则2.1精度和稳定性智能小车速度的精确测量和控制是保证小车运行安全和稳定的基础。
因此,在设计速度测量控制系统时,应优先考虑精度和稳定性的要求。
为了提高精度,可以采用高精度的传感器来测量小车的实时速度;为了提高稳定性,可以采用滤波算法对速度信号进行平滑处理。
2.2实时性和响应性智能小车的速度测量和控制必须具备良好的实时性和响应性。
实时性是指系统能够及时获得小车的速度信息,响应性是指系统能够迅速对速度变化作出调整。
在设计时,可以采用高频率的采样和控制周期来提高实时性和响应性。
2.3可扩展性和灵活性智能小车的需求和环境可能发生变化,因此,速度测量控制系统必须具备良好的可扩展性和灵活性。
可扩展性是指系统能够方便地扩展和添加新的功能;灵活性是指系统能够适应不同的小车和场景。
在设计时,可以采用模块化和接口化的设计方法,并使用可编程的控制器,以便系统可以方便地进行功能升级和扩展。
3.系统组成3.1速度传感器智能小车的速度测量需要使用速度传感器。
常用的速度传感器包括编码器和激光测距仪。
编码器可以通过检测轮轴的旋转来测量速度,激光测距仪可以通过测量激光到达和返回的时间来计算速度。
在选择速度传感器时,需要根据具体的应用场景和要求来确定。
3.2控制器智能小车的速度控制可以使用PID控制器或者模糊控制器。
PID控制器是一种经典的控制方法,通过调节比例、积分和微分参数来实现控制;模糊控制器则是一种基于模糊逻辑的控制方法,通过对输入和输出之间的关系进行模糊化和解模糊化来实现控制。
在选择控制器时,需要根据系统要求和控制效果来确定。
3.3控制算法智能小车的速度控制需要使用合适的控制算法。
智能小车控制系统设计实现提纲:1. 设计智能小车控制系统的必要性与意义2. 智能小车控制系统设计的原则和方法3. 智能小车控制系统实现的技术和难点4. 智能小车控制系统在未来的发展趋势5. 智能小车控制系统在实际应用中的案例分析和评价1. 设计智能小车控制系统的必要性与意义智能小车控制系统的设计是基于对于小车的运动控制,使其能够有效地行驶,在各种环境和道路状况下,能够保证稳定性和安全性。
同时,智能小车还需要自主感知灰尘、空气质量等数据,能够对各种交通或人员行为进行判断或预测,从而为行驶安全保驾护航,加强人类对环境的认知。
2. 智能小车控制系统设计的原则和方法打造高品质的智能小车控制系统,一定要遵循以下设计原则:(1)全面的模块化设计:该系统设计需要专业的人才,将系统模块化。
只有合理地划分模块,才能保证安全可靠的系统。
(2)充分的数据支持:智能小车控制系统的打造需要精准的行走数据支持。
在系统设计的过程中需要引入传感器、激光雷达、GPS系统等仪器,收集数据并反馈给控制器,以实现更好的检测和行车控制。
(3)稳定性和可靠性:设计过程中需要在系统中引入错误处理模块,保证系统在出现错误的情况下可以正确处理,从而保证系统的稳定性和可靠性。
(4)简洁和高效:在系统设计中需要保证系统的结构简单,在乱糟糟的交通情况下更容易实现长时间稳定运行。
(5)逐步优化和改进:设计过程中需要不断地优化和改进,跟上前沿的科技发展,提高系统的性能和校准数据。
3. 智能小车控制系统实现的技术和难点智能小车控制系统是一个由传感器、激光雷达、网络通信系统、操作系统、控制算法、安全设计等多个组成部分构成的庞大系统,实现上的难点主要在以下几个方面:(1)多种传感器测试数据的整合和处理,从而精准反馈给控制器让智能小车做出合理的运行决策。
(2)软件计算量的大增量,需要在有限的时间内获得足够的CPU和其他计算性能支持。
(3)为了提高系统的灵活性和可扩展性,整体上采用了优化算法和多策略集合的形式,以保证智能小车可以适合各种复杂的驾驶环境。
关键词:智能小车;控制系统;设计和实现1智能小车控制系统概述智能小车控制系统是一个综合、复杂的系统,其既有多种技术,也含有嵌入式的软件设备和硬件设备、图像识别、自动控制和电力传动、机械结构等技术知识,智能小车的控制系统主要是围绕嵌入式控制系统进行的,将其作为操控的中心,并借助计算机系统,最终完成自动造作和控制的过程[1]。
智能小车的控制系统流程图见图1所示。
2智能小车的设计和实现2.1智能小车的硬件设计硬件设计是保证智能小车平稳运行的必要条件,它关系着控制系统的精度和稳定性,因此在设计时需要用在模块化设计思想,该研究是通过采取硬件系统K60芯片作为核心控制器,并通过图像采集模块和电机、舵机驱动模块、测速模块、电源模块等组成硬件设计系统图,见图2。
首先,电源电路设计,该设计时智能小车的动力来源,为小车运行提供不断的电力,一般采取7.3V、容量为2000mAh的可充电型的镍铬电池作为电源,但是其不能直接为控制器传输电力,需要在转变电路后才可以进行传输。
转变电路可以保证控制器直接对电池内的电压进行调节,保证不同模块可以正常工作和运行,智能小车主要是依靠控制电力和电机驱动进行转变的。
其次是K60最小系统板,在设计时需要将K60的管脚部分做成最小系统的单独电路板,这样可以简化电路板的设计,促使调试更加顺利,K60系统板主要由K60芯片、复位电路、时钟电路、JTAG下载电路、电源滤波电路组成。
再其次是电机驱动电路,该电路是在集成芯片的驱动下进行的,可以为控制器更其他模块提供较大的电流最终集成电机驱动芯片,但是要特别注意这部分因为在电机驱动过程中有较大的分功率,会导致小车在进行调试时因为过大的电流导致小车电路发生堵塞现象,而使小车电路被烧毁,因此需要设计者避免这种现象,可以将驱动电路做成驱动板[2]。
最后是舵机接口电路。
在智能小车设计中,舵机主要保证小车可以顺利转向,因此舵机的运行电压、转向动作、转向速度都是需要考虑的因素,一般选择舵机时主要选择Futaba3010,选择供电电压为6V。
基于快速控制原型的智能小车控制系统设计与开发智能小车作为一种具有自主导航和自动驾驶能力的机器人系统,在日常生活和工业领域中发挥着重要的作用。
为了实现智能小车的高效控制,本文基于快速控制原型开展了智能小车控制系统的设计与开发。
首先,我们需要确定智能小车控制系统的整体架构。
该系统包括感知模块、决策模块和执行模块。
感知模块负责从环境中获取传感器数据,例如摄像头图像和距离传感器的数据。
决策模块利用感知模块获取的数据进行分析和决策,确定小车的行驶策略。
最后,执行模块根据决策模块的指令,控制小车的电机和转向机构,实现具体的运动控制。
接下来,我们使用快速控制原型的方法进行系统设计与开发。
快速控制原型是一种迭代的设计方法,能够快速验证和修改系统设计。
首先,我们采用MATLAB/Simulink工具进行建模和仿真。
通过建立小车的动力学模型,我们可以在仿真环境中验证控制算法的有效性和稳定性。
同时,我们还可以在仿真环境中模拟不同场景和障碍物,以测试系统在复杂环境下的性能。
在模型验证通过后,我们将控制算法移植到硬件平台上进行实际测试。
我们选择了Arduino作为硬件平台,它具有开源性和易于扩展的特点。
通过与Arduino的串口通信,我们可以将控制算法上传到硬件平台,并实时接收传感器数据和控制指令。
在实际测试中,我们还可以通过添加避障传感器和通信模块等扩展硬件,提升智能小车的功能和性能。
最后,我们对系统进行优化和改进。
通过不断迭代设计和测试,我们可以发现系统中存在的问题和不足之处,并进行相应的改进。
例如,我们可以优化控制算法的实时性和鲁棒性,提高智能小车在复杂环境下的导航和避障能力。
此外,我们还可以对硬件平台进行优化,例如改进传感器精度和增加电池容量,提升系统的性能和稳定性。
综上所述,本文基于快速控制原型开展了智能小车控制系统的设计与开发。
通过模型验证和实际测试,我们可以得到一个具有高效控制能力的智能小车系统。
这对于智能交通、物流运输和工业自动化等领域的发展具有重要意义。
基于单片机的智能小车速度控制设计一、本文概述随着科技的飞速发展,智能化、自动化已成为现代工业和生活的重要趋势。
智能小车作为这一趋势的代表之一,其研究与应用日益受到人们的关注。
智能小车在无人驾驶、物流配送、智能巡检等领域具有广泛的应用前景。
而速度控制作为智能小车运行过程中的关键环节,其设计的优劣直接影响到小车的性能与稳定性。
因此,本文旨在探讨基于单片机的智能小车速度控制设计,以期为智能小车的实际应用提供有益的参考。
本文将首先介绍智能小车速度控制的重要性及其研究背景,阐述基于单片机的速度控制设计的基本原理与优势。
接着,文章将详细分析智能小车速度控制系统的硬件组成和软件设计,包括单片机的选型、电机驱动电路的设计、速度传感器的选择以及控制算法的实现等。
在此基础上,文章还将探讨如何通过优化算法和硬件配置来提高智能小车的速度控制精度和稳定性。
文章将总结基于单片机的智能小车速度控制设计的实际应用效果,展望未来的发展趋势与挑战。
通过本文的研究,我们期望能够为智能小车的速度控制设计提供一种新的思路和方法,推动智能小车技术的进一步发展,为智能交通和智能化生活贡献一份力量。
二、智能小车速度控制的意义和现有技术智能小车的速度控制是现代智能车辆技术中的关键组成部分。
它对于提高小车的行驶安全性、提升运输效率以及实现无人驾驶等先进功能具有极其重要的意义。
精确的速度控制能够确保小车在复杂多变的环境中保持稳定,避免因速度过快或过慢导致的碰撞或延误。
通过速度控制,智能小车可以在不同路况和交通条件下实现自适应调整,提高行驶效率。
速度控制还是实现智能小车高级功能如自动巡航、自动避障等的基础,对于推动智能车辆技术的发展具有重要意义。
目前,智能小车的速度控制技术主要依赖于电子控制单元(ECU)和传感器技术。
ECU通过接收来自各种传感器的信号,如轮速传感器、加速度传感器等,实现对小车速度的精确控制。
同时,随着微处理器技术的发展,越来越多的智能小车开始采用基于单片机的控制系统,这种系统具有集成度高、成本低、可靠性强的优点。
自循迹智能小车控制系统的设计与实现自循迹智能小车控制系统的设计与实现1. 引言智能小车是一种可以自动导航及执行任务的设备,具有广泛的应用领域,如物流、仓储、医疗等。
自循迹智能小车可以通过感知环境并判断合适的路径,实现自主导航。
本文将详细介绍自循迹智能小车控制系统的设计与实现过程。
2. 控制系统的硬件设计2.1 控制芯片选型在设计自循迹智能小车控制系统之前,首先需要选取合适的控制芯片。
常用的选择包括Arduino、Raspberry Pi等。
本文选择使用Arduino控制芯片,理由如下:1) Arduino具有开源、易学易用的特点,适合初学者学习和使用。
2) Arduino具有丰富的扩展接口,可以方便地与其他硬件设备进行连接。
2.2 传感器选型传感器是自循迹智能小车控制系统的关键部分,常用的传感器包括光电传感器、红外传感器等。
本文选择使用红外传感器,理由如下:1) 红外传感器可以检测到地面上的黑线,用于实现自循迹功能。
2) 红外传感器价格相对较低,适合在自循迹智能小车中应用。
3. 控制系统的软件设计3.1 控制算法设计在自循迹智能小车中,控制算法是实现自主导航的关键。
常用的控制算法包括PID控制算法、模糊控制算法等。
本文选择使用PID控制算法,理由如下:1) PID控制算法简单易懂,容易实现。
2) PID控制算法可以根据当前误差来调整小车的行驶方向和速度,实现自动校正。
3.2 软件实现在控制系统的软件实现中,需要编程实现传感器数据的读取、算法的计算以及控制命令的输出。
本文使用Arduino开发环境进行编程,具体步骤如下:1) 编写传感器读取模块的代码,在指定频率下读取红外传感器数据。
2) 编写PID控制算法模块的代码,在读取到的传感器数据基础上进行计算,得到控制命令。
3) 编写控制命令输出模块的代码,将控制命令通过引导电路传输到小车电机控制模块。
4) 调试代码,通过串口监视器观察系统的运行情况,并根据需要进行调整。
摘要随着自动控制技术的迅速发展,自动化技术已广泛应用于国计民生的各行各业。
智能汽车就是自动化技术发展的重要成果之一。
本文介绍了智能小车的研究设计背景与现状及其各个工作模块的工作原理、硬件及软件设计。
本设计中的自动循迹模块采用光电传感器循迹方法,选用RPR220型红外一体式发射接收管作为光电传感器,通过三组光电传感器识别小车的运行姿态。
避障模块利用超声波测距传感器,超声波发射部分的换能器选用TCT40-16T,接收部分选用TCT40-16R,在小车的左前右分别安装一组测距传感器实现避障功能。
设计遥控模块对小车进行启停及加减速控制,通过光电编码实现对小车的测速功能。
设计显示模块从而实时了解小车的运行状态。
选用包含H桥的L298N模块,利用PWM驱动小车行驶。
关键字:循迹,避障,遥控,显示,测速,PWM驱动ABSTRACTWith the rapid development of automatic control technology, automation technology has been widely used in various industries of the national economy and the people’s livelihood. Smart car is one of the important results of the development of automation technology. This article describes the design background and current situation of the intelligent car and the working principle, hardware and software design of the car’s modules.The automatic tracking of this design uses photoelectric sensor tracking method, and we choose RPR220 as the photoelectric sensor, which integrate the infrared transmitting and receiving tubes, three sets of photoelectric sensor distinguish the car’s running posture. Obstacle avoidance module utilizes ultrasonic distance sensor. We choose TCT40-16T as the emitting portion of the ultrasonic transducer and TCT40-16R as the receiving portion. Three distance measuring sensors are respectively fixed on the front, left and right of the car to achieve the obstacle avoidance function. Design remote control to control the start,stop,acceleration and deceleration of the car, and we utilize the optical-electricity encoder to realize the car’s speed measuring function. Design the display module to know the real-time of the car. Choose the L298N module which contains the H-bridge and utilize the PWM to drive the intelligent car running.KEYWORDS:tracking, obstacle avoidance, remote control, display, speed measurement, PWM driving目录摘要(中文) (1)摘要(外文) (2)1 绪论 (1)1.1 设计背景与意义 (1)1.2 当前国内外的研究设计现状及成果 (2)1.2.1 国外研究现状及成果 (2)1.2.2 我国研究现状及成果 (3)1.3 本设计的内容及结构 (4)1.3.1 设计内容 (4)1.3.2 本文结构 (5)2 智能小车控制系统的设计原理 (7)2.1、智能小车自动循迹原理 (7)2.1.1 小车循迹原理 (7)2.1.2 光电传感器工作原理 (8)2.1.3 光电传感器的常用类型 (9)2.2 超声波测距避障原理 (9)2.3 智能小车测速原理 (12)2.3.1直流电机测速 (12)2.3.2 光电码盘测速 (14)2.4 智能小车遥控原理 (15)2.4.1 红外遥控的实现模块 (15)2.4.2 红外遥控的工作原理 (15)2.5 智能小车的电机驱动电路工作原理 (16)3 智能小车控制系统的硬件电路图设计 (17)3.1 智能小车的电源模块设计 (17)3.2 智能小车自动循迹的硬件电路设计 (18)3.2.1 循迹传感器选择 (18)3.2.2 循迹电路图设计 (19)3.3 智能小车超声波测距的硬件电路设计 (20)3.3.1 超声波发射部分的硬件电路设计 (20)3.3.2 超声波接收部分的硬件电路设计 (20)3.4 智能小车数码显示的硬件电路设计 (21)3.4.1 LED数码显示器的结构与显示段码 (21)3.4.2 LED数码显示器的显示方法 (23)3.4.3 数码显示的硬件设计 (23)3.5 智能小车遥控的硬件电路设计 (24)3.5.1 智能小车的遥控发射模块硬件设计 (24)3.5.2 智能小车的遥控接收模块硬件设计 (25)3.6 智能小车电机驱动的硬件电路设计 (26)3.6.1 智能小车的电机驱动芯片选择 (26)3.6.2 智能小车的电机驱动电路的设计 (27)3.7 智能小车整体的硬件电路设计 (27)4 智能小车控制系统的软件设计 (29)4.1 主程序设计 (29)4.2 自动循迹模块程序设计 (30)4.3 测距避障模块程序设计 (2)4.4 数码显示模块程序设计 (3)4.5 编码测速模块程序设计 (4)4.6 红外遥控模块程序设计 (5)总结............................................... 错误!未定义书签。
自循迹智能小车控制系统的设计与实现一、引言随着科技的不断发展,智能小车在工业自动化和机器人领域得到了广泛的应用。
自循迹智能小车作为这一领域中的重要应用之一,具有广泛的应用前景。
本文将探讨。
二、自循迹智能小车的原理自循迹智能小车是通过图片识别及算法判断来实现自动行进的智能车辆。
其原理基于图像处理技术和机器学习算法,通过识别地面上的线路图案,来判断车辆的行进方向。
三、1. 硬件设计自循迹智能小车的硬件设计主要包括传感器、控制器和执行器。
传感器用于获取地面图案的图像信息,控制器用于接收处理传感器的数据,并通过执行器来实现小车的运动。
2. 软件设计自循迹智能小车的软件设计主要包括图像处理算法和控制算法。
图像处理算法使用计算机视觉技术,通过分析图像中的线路信息来确定行车方向。
控制算法根据图像处理的结果,对小车进行控制,让其按照预定的路线行驶。
3. 系统集成与调试将硬件和软件进行集成,并进行系统调试。
在此过程中,需要对传感器的位置、灵敏度等进行调整,以确保能够获取准确的图像信息。
同时,还需要对图像处理和控制算法进行调试,以确保小车能够按照预定的路线行驶。
四、实验结果与分析在实验中,我们设计了一个自循迹智能小车,并进行了多组实验。
实验结果表明,我们设计的自循迹智能小车能够准确地识别地面上的线路图案,并按照预定的路线进行行驶。
实验结果也表明,我们设计的自循迹智能小车具有较好的鲁棒性,能够适应不同复杂度的线路图案。
五、未来展望自循迹智能小车作为智能化工业自动化领域的重要应用,具有广泛的应用前景。
未来,我们将继续改进自循迹智能小车的识别算法和控制算法,提高其识别和控制的精度和效率。
同时也将尝试将自循迹智能小车应用于实际工业生产中,为提高生产效率和降低人工成本做出贡献。
六、结论本文对进行了探讨。
通过硬件的设计和软件的开发,我们成功实现了一个能够准确识别地面线路图案并按照预定路线行驶的自循迹智能小车。
实验结果表明,我们设计的控制系统具有较高的精度和鲁棒性。
内蒙古科技大学智能仪表综合训练设计说明书题目:智能小车测速系统设计学生姓名:学号:专业:测控技术与仪器班级:2009-1 指导教师:孙采鹰讲师摘要近年来,随着我国经济建设的高速发展,机动车辆拥有量也在急剧增长,交通事故也日益增多,车辆超速成为了越来越严重的问题。
而我国生产的汽车、摩托车电机转速测量系统大多使用动圈式模拟测速。
这种测量系统存在精度差、过载能力弱等缺点。
本次的智能仪表综合训练的主要任务是设计一个智能小车,要求实现小车能够直走、通过光电传感器进行测速、通过PWM 电路模块进行调速以及通过LCD1602 液晶模块进行脉冲、速度、PWM 的占空比三个参数的显示。
控制板的设计以8 位的STC89C52 单片机为控制核心,驱动板则以L289N 驱动芯片为核心,应用光电传感器和LCD 液晶模块,成功的实现了小车的测速、调速和显示功能这三大功能。
课题完成了光电传感器、单片机、控制板、驱动板选择,采购接口电路的设计和连接以传感器和电路的安装位置和方式的安排,并完成了整个硬件的安装工作。
除此之外,还对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成了软件和硬件的融合,基本实现了智能小车要求实现的预期的功能。
关键词:智能小车;光电传感器;驱动芯片;LCD 液晶模块;单片机I 目录第一章绪论 1 1.1 问题的提出 1 1.2 设计思路2第二章方案论证 3 2.1 控制核心的选择及其简介3 2.1.1 STC89C52RC单片机简介4 2.1.2 小车控制板简介7 2.2 小车驱动方式选择10 2.3 光电测速模块11 2.4 LCD1602 显示模块12第三章系统硬件设计16 3.1 车体结构及其驱动电路16 3.2 测速模块的设计18 3.3 PWM调速模块的设计21 3.3.1 PWM硬件电路的设计22 3.3.2 PWM电路的使用方式及连线23第四章系统软件的设计25 4.1 主程序的设计25 4.2 测速模块程序的设计26 4.3 PWM调速模块程序的设计28 4.4 LCD1602 液晶显示程序的设计28总结30参考文献31附录1 原理图32附录 2 源程序35附录 3 实物图41 II 第一章绪论1.1 问题的提出当今世界,科学技术日新月异。
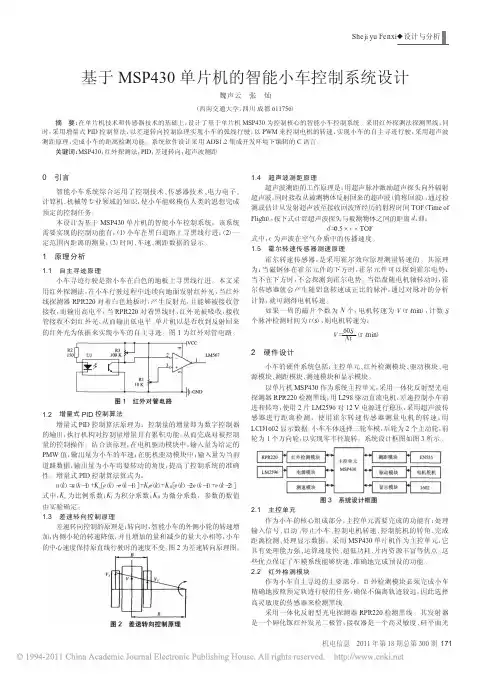
智能小车控制系统设计谢檬;郭霞【摘要】以16位低功耗单片机MSP430F5438为控制核心,以直流电机作为驱动的动力,设计了智能小车并采用脉宽调制(PWM)方式实现对车速的准确控制;使用灰度传感器来检测起点/终点标志线及转弯/超车标志线;在超车区使用超声波传感器来测量两辆小车之间的距离,并在轨道的超车区内进行超车;使用无线通信模块来进行两车之间的超车通信,有效避免两车相撞并顺利实现超车;用电子指南针模块来对两小车进行精确定位及转弯控制和在行车道上方向的校正.通过对样机进行了测试,结果表明:智能小车可以实现单车绕圈行驶、两车防撞前后行驶、两车在规定的区域完成超车等功能,且其性能稳定、抗干扰性强,在无人驾驶系统方面得到广泛应用.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)012【总页数】3页(P110-112)【关键词】光电传感器;超声波传感器;电子指南针;无线通信【作者】谢檬;郭霞【作者单位】西安交通大学城市学院,陕西西安710018;西安交通大学城市学院,陕西西安710018【正文语种】中文【中图分类】TP212.9智能小车作为机器人的典型代表,相对于传统的汽车有着更好的安全性、机动性和广泛的适用性[1~3],是一个集合环境感知、规划决策,自动行驶等功能于一体的综合系统。
智能小车主要应用领域为:军事侦察与环境探测;探测危险与排除险情;安全检测受损评估;智能家居等[4~6]。
生活小区内路面情况简单,行人多、机动车少,采用无人驾驶的电力通勤车最为合适。
本文所设计的智能小车以TI公司的单片机MSP430F5438作为控制核心[7],以直流电机作为驱动的动力,并采用脉宽调制(PWM)方式实现对车速的准确控制;采用了红外光电传感器对边界和标志线进行检测、设计了超声波传感器和无线收发模块进行两车距和车位的检测、利用电子指南针传感器进行对智能车转弯的控制。
实现了单车绕圈行驶、两车防撞前后行驶、两车在规定的区域完成超车等功能。
毕业教学环节成果(2012 届)题目智能小车速度测量控制系统设计学院信息工程学院专业电气自动化技术班级学号姓名指导教师2012年5月17日目录摘要 (1)英文摘要 (1)引言 ................................................................. - 2 -1 方案设计与论证 .. (3)1.1 主控系统 (3)1.2 电机驱动模块 (3)1.3 测速模块 (4)1.4 显示模块 (4)2 系统的硬件电路 (4)2.1 总体设计 (4)2.2 单片机控制系统设计 (5)2.3 电机驱动电路设计 (6)2.4 LCD显示电路设计 (7)2.5 键盘电路设计 (8)2.6 测速电路设计 (8)2.7 电源电路设计 (8)3 系统软件设计 (9)3.1 测速程序 (10)3.2 显示程序 (10)4 调试 (12)结论与谢辞 .......................................................... - 13 -参考文献 ............................................................ - 14 -附件1.程序清单..................................................... - 15 -附件2.整体原理图................................................... - 23 -智能小车速度测量控制系统设计信息工程学院电气自动化专业摘要:智能小车以STC12C5410AD单片机为控制核心,L298芯片作为双电机驱动模块,由单片机输出PWM控制电机转速,通过光电编码器检测脉冲并将信号送入单片机来测量电机的转速与距离,通过1602液晶来显示小车的速度。
本文介绍了该小车的的主控、电机驱动、电源、显示模块等硬件模块和小车的运动控制速度测量与显示的软件设计。
关键词:STC12C5410AD 1602LCD PWM 光电编码器Intelligent Vehicle Speed Measurement ControlSystem DesignAbstract:Car STC12C5410AD single chip microcomputer intelligent to as control core, L298 chip as double motor driver module, output by single-chip microcomputer control PWM motor speed, through the photoelectric encoder and will signal detection pulse to single chip microcomputer to measure motor speed and distance, through 1602 LCD to display the speed of the car. This paper introduces the main control of the car, motor drive, power supply, display module and other hardware module and a car movement control speed measurement and display software design.Keywords: STC12C5410AD 1602LCD PWM Photoelectric encoder引言近年来,随着我国经济建设的高速发展,机动车辆拥有量也在急剧增长,交通事故也日益增多,车辆超速成为了越来越严重的问题。
而我国生产的汽车、摩托车电机转速测量系统大多使用动圈式模拟测速。
这种测量系统存在精度差、过载能力弱等缺点。
本系统是以STC12C5410AD单片机为控制核心,通过L298芯片控制电机转速,用光电编码器来检测脉冲再将信号送入单片机来测量电机的转速并使用1602液晶来显示小车的速度。
1方案设计与论证根据要求,确定如下方案:整个小车系统主要由三轮结构小车、供电电源电路、测速电路、电机驱动电路以及显示电路组成。
这种方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求。
1.1 主控系统根据设计要求,我认为此设计属于多输入量的复杂程序控制问题。
据此,拟定了以下两种方案并进行了综合的比较论证,具体如下:方案一:选用一片CPLD(如EPM7128LC84-15)作为系统的核心部件,实现控制与处理的功能。
CPLD具有速度快、编程容易、资源丰富、开发周期短等优点,可利用VHDL语言进行编写开发。
但CPLD在控制上较单片机有较大的劣势。
同时,CPLD的处理速度非常快,而小车的行进速度不可能太高,那么对系统处理信息的要求也就不会太高,在这一点上,MCU就已经可以胜任了。
若采用该方案,必将在控制上遇到许许多多不必要增加的难题。
为此,我们不采用该种方案,进而提出了第二种设想。
方案二:采用单片机作为整个系统的核心,用其控制行进中的小车,以实现其既定的性能指标。
充分分析我们的系统,其关键在于实现小车的运动控制,而在这一点上,单片机就显现出来它的优势——控制简单、方便、快捷。
这样一来,单片机就可以充分发挥其资源丰富、有较为强大的控制功能及可位寻址操作功能、价格低廉等优点。
因此,这种方案是一种较为理想的方案。
针对本设计特点——多开关量输入的复杂程序控制系统,需要擅长处理多开关量的标准单片机,在综合考虑了传感器、两部电机的驱动等诸多因素后,我们决定采用STC12C5410AD单片机,充分利用单片机的资源。
1.2 电机驱动模块方案一:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整,此方案的优点是电路较为简单,缺点是继电器的响应时间慢,易损坏,寿命较短,可靠性不高。
方案二:采用由集成了双极性管组成的H桥电路芯片L298N。
用单片机控制晶体管使之工作在占空比可调的开关状态,精确调整电机转速。
这种电路由于工作在管子的饱和截止模式下,效率非常高;H桥电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也很高,是一种广泛采用的调速技术。
综合两种方案的优缺点,决定选择方案二。
1.3 测速模块在电机测速中,考虑了两种方案:一种是使用光电码盘,即透射式光电传感器(凹槽型,类似老式鼠标),另一种是霍尔传感器(适合较高速度)。
两种方案的主要区别如表1-1:表1-1 速度检测系统方案对比霍尔传感器关电码盘抗干扰性较强强实时性较好好易用性需和磁钢配对使用,较麻烦较简单由上表可以看出光电码盘在各方面都具有一定的优势,因此本设计采用关电码盘测速。
1.4 显示模块系统采用1602液晶显示,它可以显示2*16个字符,同时只用11个I/O端口,它不仅节省了单片机的资源,相比较数码管液晶显示更加直观、节能,同时在硬件上面液晶的驱动电路比数码管简单的多,故采用LCD显示。
图1-2 1602字符型液晶显示2 系统的硬件电路2.1 总体设计小车本体用有机玻璃制作,有两部分组成,长方体长20cm,宽17cm,半圆为直径为17cm,车架用于支撑控制板、供电电源等。
车体总结构有3个轮子组成,前面两个带有电机驱动,电机的型号为PITTMAN直流测速电机0585,具体参数为电压:4-150V 功率:4-200w,电机减速比为1:74,减速后电机的转速为100r/min;后面一个为万向轮,在底板的正中间安装各块电路板(有主板、电机驱动以及显示板)。
搭建小车自行本体,采用左右两轮分别驱动,即左右两轮分别采用两个转速和力矩基本相同的减速进行驱动,车子的后面安装一个万向轮。
图2-1 主板设计框图2.2 单片机控制系统设计采用STC12C5410AD单片机作为整个系统的核心,用其控制行进中的小车,以实现其既定的性能指标。
图2-2 STC12C5410AD单片机STC12C5410AD是通过串口连接到PC机进行在线程序编译的。
由于电脑串口RS232电平是+10v、-10v,而一般的单片机应用系统的信号电压是TTL电平0、+5v,MAX232是由德州仪器公司(TI)推出的一款兼容RS232标准的芯片,该器件包含2驱动器、2接收器和一个电压发生器电路提供TIA/EIA-232-F电平MAX232,用来进行电平转换。
本设计MAX232芯片及其功能电路,如图2-3所示:图2-3 单片机MAX232芯片及接口电路通过串口与计算机相连,使用STC-ISP软件实行在线程序烧写。
电路连接部分如图所示。
MAX232芯片通过两管脚与单片机RXD、TXD端相连,以实现向单片机内部传递程序。
基本工作过程:发送时MCU的TXD(TTL电平)经过MAX232的11(T1IN)送到MAX232内部,在内部TTL电平被提升为232电平,通过14(T1OUT)发送出去,接收时外部232电平经过MAX232的13(R1IN)进入到MAX232的内部,在内部232电平被降低为TTL电平,经过12(R1OUT)送到MCU的RXD,进入MCU内部。
2.3 电机驱动电路设计系统采用两个直流电机,实现正反转、加减速功能,所以需要使用四个功率元器件的H桥电路,L298是SGS公司的产品,内部包含4通道逻辑驱动电路,即内含二个H桥的高电压大电流双向桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A 以下的电机,所以根据实际需要选择了L298N芯片。
驱动电路的设计如图2-4所示:图2-4 L298N驱动电路L298N的IN1、IN2、1IN3、IN4四个引脚接到单片机上,通过对单片机的编程就可以实现两个直流电机的PWM调速以及正反转等功能。
电机转动状态编码如表2-5所示:表2-5 电机转动状态编码左电机右电机左电机右电机电动车运行状态1IN1 1IN2 2IN1 2IN21 0 1 0 正转正转前行1 0 0 1 正转反转左转1 0 0 0 正转停以左电机为中心原地左转0 1 1 0 反转正转右转0 0 1 0 停正转以右电机为中心原地右转0 1 0 1 反转反转后退1 1 1 1 杀停杀停立刻停止2.4 LCD显示电路设计液晶显示器以其微功耗、体积小、显示内容丰富、超薄轻巧的诸多优点得到广泛的利用,本模块将RS、RW、E分别接到单片机14、15、16引脚,RS为寄存器选择,高电平时选择数据寄存器,低电平时选择指令寄存器;RW为读写信号线,高电平为读操作,低电平为写操作;E端为使能端,由高电平跳为低电平时液晶执行命令。