同步发电机励磁系统的建模及仿真
- 格式:docx
- 大小:1.07 MB
- 文档页数:11
2023年度电力系统同步发电机励磁系统的建模与仿真随着电力系统的快速发展和电力负荷的不断增加,同步发电机在电力系统中的作用日益重要。
在发电过程中,同步发电机的励磁系统起着至关重要的作用,它不仅决定了发电机的输出功率和电压稳定度,还直接影响到电力系统的稳定性和安全性。
因此,对同步发电机励磁系统进行建模和仿真,分析其特性及优化其性能具有十分重要的实用价值和工程应用前景。
本文将针对电力系统同步发电机励磁系统的建模和仿真,从理论分析、实验研究和实际应用等角度进行探讨,并提出相应的解决方案和建议。
一、同步发电机励磁系统的基本原理同步发电机是电力系统中常用的发电设备之一,其工作原理是通过励磁系统对转子产生恒定电磁势,使得电动机的旋转速度与电网同步。
励磁系统由调节回路和发电机励磁机组成,前者用于调节励磁电流大小,后者用于产生励磁电流。
励磁机由交流电源供电,将电能转换为磁能,形成恒定的磁场,以激励转子产生电势,并与电网同步。
二、同步发电机励磁系统的建模方法同步发电机励磁系统建模方法通常采用开环和闭环两种方法。
开环方法着重考虑发电机励磁机的特性和参数,而忽略负载和电力系统的影响;闭环方法则将发电机励磁系统与负载和电力系统耦合起来,考虑更加全面的影响因素。
基于此,可以利用MATLAB等软件对同步发电机励磁系统建立模型并进行仿真。
三、同步发电机励磁系统的特性分析同步发电机励磁系统特性分析是建模和仿真的重要内容,其目的是分析系统的性能和稳定性。
特性分析主要包括励磁电路特性分析、励磁系统数学模型建立、励磁机暂态过程仿真等方面。
四、同步发电机励磁系统的优化同步发电机励磁系统的优化可以通过改变发电机励磁电路参数、控制环节参数等方式进行。
其中,提高励磁机的内部反馈控制效果,降低负载波动对励磁系统的影响,并采用先进的励磁控制算法等方法,可以显著提升系统的质量和性能。
五、同步发电机励磁系统仿真结果分析通过对同步发电机励磁系统的仿真分析,可以建立电网和发电机系统的各种工况和稳态性能参数,并提出相应的改进措施和建议。
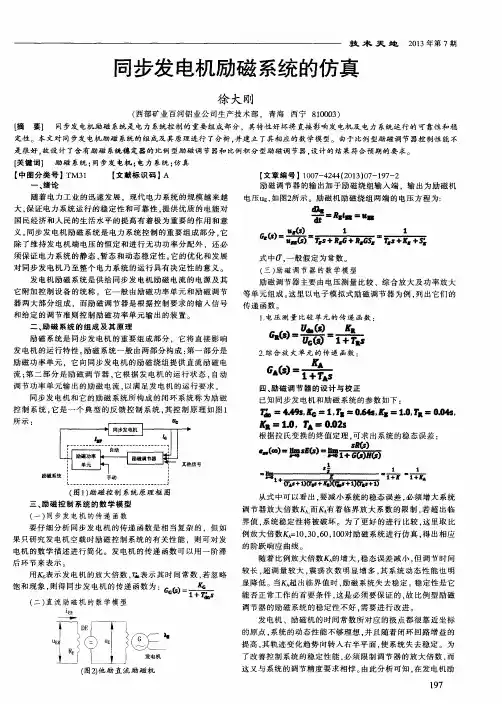
浅析同步发电机励磁系统建模摘要:励磁系统的建模是提高电力系统稳定分析水平的关键手段,对应于不同的电厂其建立励磁系统模型的过程也不尽相同,本文在励磁系统参数完备的基础上,通过对励磁系统调节器的参数实测和幅值实测来建立原始的模型参数,再通过固定模式转换和模型校验来得到最终的励磁系统的模型。
关键词:励磁系统模型参数实测幅值实测固定模式转换发电机励磁系统在电力系统中起着非常重要的作用。
其主要作用是维持发电机端电压恒定,控制并列运行发电机间无功功率合理分配,提高发电机及电力系统的稳定性,这些都是励磁系统的基本作用。
在诸多改善发电机稳定性措施中,提高励磁系统的控制性能是最有效和经济的措施之一,随着大电网的互联,电力系统容量倍增,加上快速励磁装置的广泛应用,使得电力系统出现了许多新的问题。
比如由于系统阻尼不足出现的低频振荡,远距离输电线路的串联补偿电容引起的次同步振荡及轴系扭振,系统无功不足、无功功率平衡破坏导致的电压崩溃,这些都威胁着电力系统的稳定运行。
二、建立励磁系统原始模型参数1.调节器各个环节参数实测。
频域辨识方法:在电压叠加点加上白噪声信号或正弦信号,进行频率特性测量,获得频率特性之后可以使用专用的拟合程序拟合获得传递函数。
相频、幅频特性应与实际测得的特性进行比较,各个环节可以分开进行,也可以几个环节合起来进行。
时域辨识方法:在电压叠加点加上阶跃信号,进行时域特性测量,获得时域响应之后可以使用专用的拟合程序拟合获得传递函数。
2.调节器各限幅值实测。
制造厂应提供AVR调节器的环节限幅值,主要是一些非线性环节限幅,如电压偏差值限幅、各运算放大器限幅、积分限幅、最大最小可控硅控制角限制等。
在静态试验中,通过改变电压信号和电压给定值使各个环节输出达到其限幅值,然后测量该值。
三、励磁原始模型向PSS/E和BPA固定模型转换发电机励磁系统按照励磁方式可分为3种基本型式:励磁机励磁系统(直流励磁机、交流励磁机)无刷励磁系统和自并励静止励磁系统。
硕士研究生学位论文X X大学论文题目(中文):基于MATLAB的同步发电机励磁系统的建模仿真论文题目(外文):Modeling and Simulation of excitation system of synchronous generator based on MATLAB/simulink 研究生姓名:XXXX学科、专业:电气工程研究方向:导师姓名职称:论文答辩日期年月日学位授予日期年月日摘要近些年来,电力系统发展迅速,基本形成了高电压、大机组、超远距离输送的模式。
因此,保证电力系统的安全、稳定、高效运行成为了研究的热点与难点。
同步发电机励磁控制系统是同步发电机控制系统的核心。
经过长年的研究证明, 实现对同步发电机励磁的合理有效控制,是实现电力系统稳定运行要求的最快捷、最有效、最廉价的方法。
传统PID控制需要线性的精确模型,无法实现对非线性对象的有效控制,不能及时应对系统运行中被控对象发生的改变,对于目前以至未来电力系统的发展特点,难以实现有效控制。
模糊控制是一种智能控制方法,它不需要精确的数学模型,鲁棒性强,同时设计简单方便,易于实现。
本文从同步发电机励磁控制系统原理入手,在深入学习PID控制与模糊控制理论之后,将两者结合起来,提出了基于模糊PID同步发电机励磁控制策略。
详细阐述了该模糊PID励磁控制器的设计过程,实现了针对同步发电机励磁控制这一非线性系统的实时在线控制。
选取了多组参数对所设计的励磁控制器进行仿真,与常规PID控制效果进行比较分析。
实验结果表明本文提出的基于模糊PID的同步发电机励磁控制效果良好,系统的动态特性和静态特性相对于传统PID励磁控制都得到改善,能够对系统运行状态的改变做出及时合理的调整,响应速度快,超调量小,调整时间短,使系统具有较强的适应和抗干扰能力,控制效果明显提高;对于传统PID控制无法解决的非线性问题,模糊PID控制依然有良好的控制效果,体现出解决非线性控制问题的优势。
无刷同步发电机励磁系统设计及仿真摘要:励磁系统是无刷同步发电机的重要组成部分,其性能对于发电机组乃至整个电力系统的运行效率和运行特性都具有决定性作用,一般来说,性能优良的励磁系统不仅能保证发电机安全稳定运行,还能保证电能质量以及电力系统静态、暂态稳定。
本文首先对无刷同步发电机励磁系统的作用进行简要论述,并着重在常规PID控制的励磁系统的基础上对基于模糊PID控制和基于BP神经网络PID控制的无刷同步发电机励磁系统的设计及仿真进行研究。
关键词:无刷同步发电机;励磁系统;模糊PID;BP神经网络;仿真无刷同步发电机具有改善电力系统稳定性的优良特性,而励磁系统在发挥无刷同步发电机的优良特性方面起着关键作用,可靠性高、性能优良且具有良好稳定性的励磁系统对于发电机组乃至整个电力系统的的安全运行起着非常重要的作用,因而在电机设计中的电磁设计占有重要地位。
无刷励磁系统由于无碳刷和滑环,要求旋转整流器和快速熔断器等有良好的机械性能,所以其维护工作量较少,能承受高速旋转的离心力,且适合在危险的环境中运行,另外,由于没有接触部件的磨损,可延长电机绝缘寿命,是现代中小型电机和大型无刷励磁系统首选励磁方式。
本文将对基于模糊PID控制和基于BP神经网络PID控制的无刷同步发电机励磁系统的设计及仿真进行研究。
一、无刷同步发电机励磁系统的作用无论发电机机组或电力系统是在稳定状态下还是在固定状态下运行,无刷同步发电机的励磁系统都起着非常关键的作用。
首先,在发电机正常运行工况下,励磁系统向发电机提供励磁电流,并且根据电力负载情况进行实时调节励磁电流,以将发电机端口电压维持在给定水平;其次,当机组并网运行时,无刷同步发电机的励磁系统合理分配机组间的无功功率;第三,改变励磁电流从而改变总含有发电机空载电动势,以此来改善系统稳定性,提高有功功率的传输能力,扩大机组运行的稳定区域;当电力系统发生电路故障比如出现短时低电压等情况,励磁系统可通过大幅增加励磁以提高电压,改善发电机运行条件,提高继电保护装置动作准确性,进而保证整个电力系统的暂态稳定性。
2020年同步发电机的励磁建模精编版2.1同步电机模型同步电机是电力系统的主要元件,电磁暂态和机电互动现象十分丰富,模型的建立和求解往往决定着仿真的精度和能够反映实际系统动态过程的程度,因此,很多专家在同步发电机建模方面展开研究并取得多项成果。
同步电机是励磁控制系统的控制对象,又和励磁控制系统密切相关系。
研究励磁系统的动态特性,离不开对同步电机动态特性的分析。
同步电机的过渡过程比较复杂,通过以d,q坐标系统推导出来的派克(Park)方程作为同步电机的基本方程,求出完整的动态模型;在某些特定的条件下,可由完整的动态模型得到简化模型。
在小干扰情况下,可以将非线性的完整模型在工作点附近线性化,得出线性化模型:同样,在某些特定的条件下,还可以求得简化的线性模型。
同步电机dqO坐标下的暂态方程称为派克方程,它是一组非线性的微分方程组。
由于dqO三轴之间的解耦以及aqO坐标下的电感参数是常数,因此派克变换及同步电机的派克方程在实用分析中得到广泛的应用。
同步电机具有三个定子绕组、一个转子绕组、两个阻尼绕组。
六个绕组间都有磁的耦合,加上转子位置不断变化,绕组间的耦合又必然是转子的位置函数。
要正确反映上述情况就需要七个非线性微分方程。
2.1.1同步电机基本方程由同步电机在d,q轴的park微分方程组出发,电压和磁链方程(以标幺值形式)如(2.1)-(2.10)所示:电压方程:定子绕组:«Skip Record If...»(2.1)«Skip Record If...»(2.2)励磁绕组:«Skip Record If...»(2.3)阻尼绕组:«Skip Record If...»(2.4)«Skip Record If...»(2.5)磁链方程:定子绕组:«Skip Record If...»(2.6)«Skip Record If...»(2.7)励磁绕组:«Skip Record If...»(2.8)阻尼绕组:«Skip Record If...»(2.9)«Skip Record If...»(2.10)其中,«Skip Record If...»。
上海电力学院《自动控制原理》MATLAB仿真实验报告课程:自动控制原理题目:发电机励磁控制系统院系:电气工程学院班级:2010021姓名:学号:20102168发电机励磁控制系统(PID 、超前、滞后控制)仿真一、仿真模型图1发电机励磁控制系统模型如图所示为发电机励磁控制系统模型。
功率励磁装置的传递函数为11f T S+,发电机的等效传递函数为11d T S'+,10.05T s =,0.5f T s =,5d T s '=,20K =,分别用不同的控制器(PID ,超前,滞后)使系统相位域量50γ≥,误差系数大于40。
,在实验过程中比较不同控制器的特点。
二、系统控制器 (1) PID 控制器PID 控制器有三个可以调整的参数,即p K 、i T 和d T ,11c p d i G K T s T s⎛⎫=++ ⎪⎝⎭这种控制器既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。
只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。
PID 控制器特别适用于过程的动态特性是线性的而且控制性能要求不太高的场合。
(2) 超前校正控制器超前校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原来系统中元件造成的过大的相位滞后。
利用其相位超前特性,可以增大系统的稳定裕度,提高动态响应的平稳性和快速性;对提高系统稳态精度作用不大,系统抗干扰能力有所下降(一般用于稳态精度已基本满足要求,但动态性能差的系统);利用校正函数()11c p TSG s K TSα+=+,()1α>求得参数进行校正。
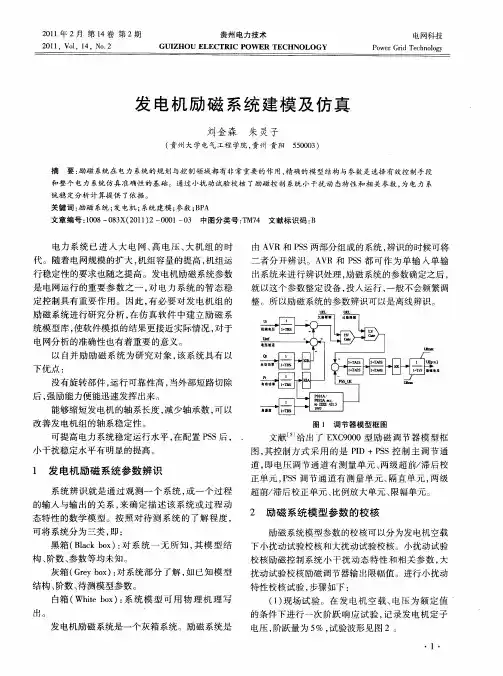
上海电力学院《自动控制原理》MATLAB仿真实验报告课程:自动控制原理题目:发电机励磁控制系统院系:电气工程学院班级:2010021姓名:学号:20102168发电机励磁控制系统(PID 、超前、滞后控制)仿真一、仿真模型图1发电机励磁控制系统模型如图所示为发电机励磁控制系统模型。
功率励磁装置的传递函数为11f T S+,发电机的等效传递函数为11d T S'+,10.05T s =,0.5f T s =,5d T s '=,20K =,分别用不同的控制器(PID ,超前,滞后)使系统相位域量50γ≥,误差系数大于40。
,在实验过程中比较不同控制器的特点。
二、系统控制器 (1) PID 控制器PID 控制器有三个可以调整的参数,即p K 、i T 和d T ,11c p d i G K T s T s⎛⎫=++ ⎪⎝⎭这种控制器既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。
只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。
PID 控制器特别适用于过程的动态特性是线性的而且控制性能要求不太高的场合。
(2) 超前校正控制器超前校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原来系统中元件造成的过大的相位滞后。
利用其相位超前特性,可以增大系统的稳定裕度,提高动态响应的平稳性和快速性;对提高系统稳态精度作用不大,系统抗干扰能力有所下降(一般用于稳态精度已基本满足要求,但动态性能差的系统);利用校正函数()11c p TSG s K TSα+=+,()1α>求得参数进行校正。
酗删如咖理论与设计基于Ansoft的永磁同步发电机建模与仿真朱少林王群京合肥工业大学(230009)ModelingandSimulationofPermanent—magnetSynchronousGeneratorBasedonAnsoftZhuShaolinWangQunjingHefeiUniversityofTechnology摘要:利用Ansoft软件中的RMxprt和Maxwell2D模块建立了永磁同步发电机(PMSG)的系统仿真模型。
通过对PMSG模型进行瞬态仿真,得到它的反电动势曲线、相电流曲线以及气隙磁密分布曲线。
仿真结果为永磁同步发电机的进一步优化设计提供了理论依据。
关键词:永磁同步发电机Ansoft瞬态仿真Abstract:Asimulationmodelofpermanent-magnetsynchronousgenerator(PMSG)waspresentedusingRMxprtandMaxwell2DmoduleofAnsoft.Theback-emfcurve.phasecurrentcurveanddistributionoftheairgapmagneticf1UXdensitycurvewereobtainedbythetransientsimulationonthePMSG.TheresultsofsimulationprovidedtheoreticalfoundationfortheoptimizationdesignofPMSG.Keywords:PMSGAnsoftTransientsimulation与电励磁同步发电机相比,永磁同步发电机具有结构简单、运行可靠、体积小、质量轻、损耗小、效率高、电机的形状和尺寸可以灵活多样等显著优点。
随着永磁材料性能的不断提高和完善,特别是铷铁硼永磁材料的热稳定性和耐腐蚀性的改善,价格的逐步降低,以及电力电子器件的进一步发展,永磁同步发电机在国防、工农业生产和日常生活等方面获得了越来越广泛的应用。
2.1同步电机模型同步电机是电力系统的主要元件,电磁暂态和机电互动现象十分丰富,模型的建立和求解往往决定着仿真的精度和能够反映实际系统动态过程的程度,因此,很多专家在同步发电机建模方面展开研究并取得多项成果。
同步电机是励磁控制系统的控制对象,又和励磁控制系统密切相关系。
研究励磁系统的动态特性,离不开对同步电机动态特性的分析。
同步电机的过渡过程比较复杂,通过以d,q 坐标系统推导出来的派克(Park)方程作为同步电机的基本方程,求出完整的动态模型;在某些特定的条件下,可由完整的动态模型得到简化模型。
在小干扰情况下,可以将非线性的完整模型在工作点附近线性化,得出线性化模型:同样,在某些特定的条件下,还可以求得简化的线性模型。
同步电机dqO 坐标下的暂态方程称为派克方程,它是一组非线性的微分方 程组。
由于dqO 三轴之间的解耦以及aqO 坐标下的电感参数是常数,因此派克变换及同步电机的派克方程在实用分析中得到广泛的应用。
同步电机具有三个定子绕组、一个转子绕组、两个阻尼绕组。
六个绕组间 都有磁的耦合,加上转子位置不断变化,绕组间的耦合又必然是转子的位置函 数。
要正确反映上述情况就需要七个非线性微分方程。
2.1.1同步电机基本方程由同步电机在d,q 轴的park 微分方程组出发,电压和磁链方程(以标幺值形式)如(2.1)-(2.10)所示:电压方程: 定子绕组:d q d d ri p U --=ωψψ (2.1)q d q q ri p U --=ωψψ (2.2) 励磁绕组: f f f f p r i U ψ-= (2.3) 阻尼绕组: d d d p i r 1110ψ-= (2.4) q q q p i r 1110ψ-= (2.5)磁链方程: 定子绕组:d ad f ad d d d i X i X i X 1++-=ψ (2.6)q aq q q q i X i X 1+-=ψ (2.7) 励磁绕组:d ad f f d ad f i X i X i X 1++-=ψ (2.8)阻尼绕组:d d f ad d ad d i X i X i X 111++-=ψ (2.9)q q q aq q i X i X 111+-=ψ (2.10) 其中,dtd p θθω==。
同步发电机励磁控制系统的仿真研究同步发电机励磁控制系统是电力系统中的重要组成部分,对于维持电力系统的稳定运行和确保电能质量具有重要意义。
随着科学技术的不断发展,对于同步发电机励磁控制系统的研究也在不断深入。
本文将介绍同步发电机励磁控制系统的研究现状,并提出一种仿真研究方案,通过实验验证该方案的有效性,最后总结文章的主要观点和成果,并指出不足之处和未来研究方向。
在现有的研究中,同步发电机励磁控制系统主要分为有功功率控制和无功功率控制两部分。
有功功率控制主要是通过调节励磁电流来控制发电机的转速,从而维持电力系统的稳定运行。
而无功功率控制则主要是通过调节励磁电流来控制发电机的端电压,从而确保电力系统的电压稳定。
然而,现有的研究主要集中在有功功率控制上,对于无功功率控制的研究相对较少。
针对现有研究的不足之处,本文提出了一种仿真研究方案。
在仿真环境中搭建了同步发电机励磁控制系统,并选取了相应的仿真参数。
在仿真过程中,通过调节励磁电流来控制发电机的转速和端电压,并记录仿真结果。
通过对比不同励磁电流下的仿真结果,可以得出励磁电流对发电机性能的影响。
在实验部分,本文选取了一台实际运行的同步发电机进行实验,通过调节励磁电流来控制发电机的转速和端电压,并记录实验结果。
实验结果表明,随着励磁电流的增加,发电机的转速和端电压均有所增加。
同时,本文还将仿真结果与实验结果进行了对比,发现两者具有较好的一致性。
通过本文的研究,可以得出以下同步发电机励磁控制系统对于电力系统的稳定运行和电能质量具有重要意义;现有的研究主要集中在有功功率控制上,对于无功功率控制的研究相对较少;通过仿真研究可以更加深入地了解励磁电流对发电机性能的影响;实验结果与仿真结果具有较好的一致性。
然而,本文的研究还存在一些不足之处。
仿真研究是一种理想化的研究方法,与实际运行情况可能存在一定的差异。
实验样本仅仅是一台实际运行的同步发电机,样本数量较少,可能无法全面反映实际情况。
目录 (1)摘要 (2)一、设计意义、任务与要求 (3)1.1设计意义 (3)1.2设计要求 (3)二、设计与论证 (3)2.1同步发电机传递函数 (3)2.2电压测量单元 (3)2.3功率放大单元 (4)2.4同步发电机励磁控制系统框图 (4)2.5 同步发电机励磁控制系统传递函数 (4)三、同步发电机励磁控制系统的Matlab电路设计与仿真 (5)3.1 电路设计 (5)3.2 simulink仿真图 (5)3.3 第二种电路设计 (6)3.4 simulink仿真图 (6)四、同步发电机励磁系统的PID控制仿真 (7)4.1 PID控制器 (7)4.2 含有PID控制器的同步发电机励磁控制系统电路设计 (8)4.3含有PID控制器的同步电机励磁系统simulink仿真 (8)五、结果分析与总结 (9)参考文献 (10)我们这次举例的发电机励磁控制系统是通过功率放大单元、电压测量单元、同步发电机等环节构成,是一个很简单的发电机励磁控制系统,但是简单的系统更容易说明问题。
PID控制器是由比例(P)、微分(D)、积分(I)三个小的环节组成,我们这次通过MATLAB的SIMULANK仿真来展示一个发电机励磁控制系统,并且展示PID控制系统在发电机励磁系统中神奇的作用。
关键词:发电机励磁控制系统 PID控制器 SIMULANK一、设计意义、任务与要求1.1设计意义电机励磁系统在结构上属于一个自动控制系统,而自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器、传感器、变送器、执行机构、输入输出接口。
控制器的输出经过输出接口、执行机构,加到被控机构上;控制系统的被控量,经过传感器,变送器,通过输入接口送到控制器。
不同的控制系统,其传感器、变送器、执行机构是不一样。
1.2设计要求我国国标《大、中型同步发电机励磁系统基本技术条件》(GB7409-1987)对同步发电机动态响应的技术指标作如下规定:(1) 同步发电机在空载额定电压情况下,当电压给定阶跃响应为±10%时,发电机电压超调量应不大于阶跃响应的50%,摆动次数不超过3次,调节时间不超过10s 。
课程设计报告课程名称电力系统自动装置原理设计题目发电机励磁系统数学建模及PID控制仿真设计时间2016-2017学年第一学期专业年级电气133班姓名姚晓学号2012012154提交时间2016年12月30日成绩指导教师陈帝伊谭亲跃水利与建筑工程学院发电机励磁系统数学建模及PID控制仿真摘要:本文主要进行了发电机励磁系统的数学建模和PID控制仿真。
励磁系统在电力系统的规划与控制领域都有非常重要的作用,精确的模型结构与参数是选择有效控制手段和整个电力系统仿真准确性的基础。
文中通过对励磁系统建模及仿真的研究,在整理系统稳定性判断理论发展的基础上,运用MATLAB软件仿真,论证了PID励磁调节可有效地改进励磁控制品质,仿真试验是调整励磁系统参数的有效措施。
关键字:电力系统、励磁系统、根轨迹、PID、仿真目录第一章绪论 (5)1.1本课题研究意义 (5)1.2本文主要内容 (5)第二章发电机励磁系统的数学模型 (7)2.1励磁系统数学模型的发展 (7)2.2发电机励磁系统原理与分类 (8)2.3发电机励磁系统的数学模型 (8)2.3.1励磁机的传递函数 (8)2.3.2励磁调节器各单元的传递函数 (10)2.3.3同步发电机的传递函数 (10)2.3.4励磁稳定器 (11)2.4励磁控制系统的传递函数 (11)第三章励磁控制系统的稳定性 (12)3.1传统方法绘制根轨迹 (12)3.2用MATLAB绘制根轨迹 (14)第四章PID在发电机励磁系统中的应用 (15)4.1同步发电机的励磁系统的动态指标 (15)4.2无PID调节的励磁系统 (15)4.2.1源程序 (15)4.2.2数值计算结果 (17)4.3有PID调节的励磁系统 (18)4.3.1源程序 (19)4.3.2数值计算结果 (20)第五章总结与体会 (23)参考文献 (24)第一章绪论1.1本课题研究意义供给同步发电机励磁电流的电源及其附属设备统称为励磁系统。
控制系统仿真结课作业同步发电机励磁系统的建模及仿真
专业:电气工程及其自动化
姓名:
学号:
指导教师:
同步发电机励磁系统的建模及仿真
发电机的三分之一故障来自于同步发电机的励磁系统,所以研究同步发电机励磁系统对于电力系统有举足轻重的作用。
所谓同步发电机励磁系统就是向励磁绕组供给励磁电流的整套装置。
按照励磁功率产生的方式不同,同步发电机的励磁方式可以分为自励式和他励式两种。
自励式是将发电机发出的交流电经过整流后输送到同步发电机的励磁侧,而他励式是同步发电机的励磁侧单独采用直流励磁机或交流励磁机作为电源供电。
以单机―无穷大系统为模型进行研究。
单机―无穷大系统模型是简单电力系统分析中最简单最常用的研究对象,其示意图如图1所示,该仿真系统由同步励磁发电机、变压器、双回路输电线和无穷大系统构成。
其中,同步励磁发电机参数为200MVA、13800V、112.5r/min、50Hz,变压器参数为Y―Y型210MVA。
图1单机―无穷大系统示意图
建模及其仿真步骤如下。
1.选择模块
首先建立一个Simulink 模型窗口,然后根据系统的描述选择合适的模块添加至模型窗口中,建立模型所需的模块如下:
1)选择Machines 模块库下的Synchronous Machine pu Standard 模块作为同步励磁发电机、Excitation System 模块作为励磁控制器。
2)选择Elements 模块库下的Three-Phase Transformer (Two Windings) 模块作为三相升压变压器、Three-Phase Series RLC Load 模块作为三相并联RLC 负载接地、Three-Phase Fault 模块作为任意相之间或者任意相与地之间的短路、Ground 模块作为接地。
3)选择Electrical Source 模块库下的Three-Phase Source 模块作为无穷大系统。
4)选择Measurements 模块库下的Voltage Measurement 模块作为电压测量。
5)选择Math Operation 模块库下的Gain 模块。
6)选择Sources 模块库下的Constant 模块。
7)选择Signal Routing 模块库下的Bus Selector 模块作为输出信号选择器。
8)选择Sinks 模块库下的Scope 模块。
2. 搭建模块
将模块放在合适的位置,将模块从输入端至输出端进行连接,搭建完的Simulink 励磁系统模型如图2 所示。
图2 Simulink 励磁系统模型
3. 模块参数设置
(1)Synchronous Machine pu Standard 模块参数设置
双击Synchronous Machine pu Standard 模块,弹出模块参数设置对话框如图3 所示。
其中,Preset model:用于选择点击型号。
Rotor type:用于选择转子类型。
Nom power,L―L volt,and freq.[Pn (VA) Vn (Vrms) fn (Hz)]:用于设置点击的额度功率、额定电压、额度频率。
Reactances[Xd Xd’ Xd’’ Xq Xq’’ X1] (pu):用于设置点击电感量。
d axis tim
e constants:用于设置d坐标的时间常量。
q axis time constants:用于设置q坐标的时间常量。
Time constants [Td’ Td’’ Tgo’’ ] (s):用于设置时间常量。
Stator resistance Rs (p.u.):用于设置电机定子电阻。
模块的具体参数设置如图3所示。
图3 Synchronous Machine pu Standard 模块参数设置对话框
(2)Excitation System 模块参数设置
双击Excitation System 模块,弹出模块参数设置对话框。
模块的具体参数设置如图4所示。
图4 Excitation System 模块参数设置对话框
(3)Three-Phase Transformer (Two Windings) 模块参数设置
双击Three-Phase Transformer (Two Windings) 模块,则弹出模块参数设置对话框。
模块具体参数设置如图5所示。
图5 Three-Phase Transformer (Two Windings) 模块参数设置对话框(4)Three-Phase Series RLC Load 模块参数设置
分别双击Three-Phase Series RLC Load 模块和Three-Phase Series RLC Load1 模块,则弹出模块参数设置对话框。
模块的具体参数设置如图6和7所示。
图6 Three-Phase Series RLC Load 模块参数设置对话框
图7 Three-Phase Series RLC Load 模块参数设置对话框(5)Three-Phase Fault 模块参数设置
双击Three-Phase Fault 模块,则弹出模块参数设置对话框。
模块的具体参数设置如图8所示
图8 Three-Phase Fault 模块参数设置对话框
(6)Three-Phase Source 模块参数设置,模块的具体参数设置如图9所示。
图9 Three-Phase Source 模块参数设置对话框
(7)Voltage Measurement 模块参数设置,模块的具体参数设置如图10所示。
图10 Voltage Measurement 模块参数设置对话框
(8)Gain 模块参数设置,具体参数设置如图11所示。
图11 Gain 模块参数设置对话框
(9)Constant 模块参数设置,设置Constant 模块中的Constant Value 为1.0,设置Constant1 模块中的Constant Value 为1.0。
(10)Bus Selector 模块参数设置,具体参数设置如图12、13所示。
图12 Bus Selector 模块参数设置对话框
图13 Bus Selector 模块参数设置对话框
4. 仿真参数设置及其运行
设置仿真参数的Start time 为0、Stop time 为10,Solver options 的步长选择变步长Variable-step,解算方法Solve 选择二阶隐式龙格-库塔解算器ode23tb,保存系统模型并仿真,仿真结果如图14~17所示。
图14 Scope 显示的仿真结果
图15 Scope1 显示的仿真结果
图16 Scope2 显示的仿真结果
图17 Scope3 显示的仿真结果
- 10 -。