ANSYS中的超单元解析
- 格式:doc
- 大小:3.19 MB
- 文档页数:50
ANSYS中单元类型介绍和单元的选择原则ANSYS中单元类型的选择:初学ANSYS的人,通常会被ANSYS所提供的众多纷繁复杂的单元类型弄花了眼,如何选择正确的单元类型,也是新手学习时很头疼的问题。
单元类型的选择,跟你要解决的问题本身密切相关。
在选择单元类型前,首先你要对问题本身有非常明确的认识,然后,对于每一种单元类型,每个节点有多少个自由度,它包含哪些特性,能够在哪些条件下使用,在ANSYS的帮助文档中都有非常详细的描述,要结合自己的问题,对照帮助文档里面的单元描述来选择恰当的单元类型。
1.该选杆单元(Link)还是梁单元(Beam)?这个比较容易理解。
杆单元只能承受沿着杆件方向的拉力或者压力,杆单元不能承受弯矩,这是杆单元的基本特点。
梁单元则既可以承受拉,压,还可以承受弯矩。
如果你的结构中要承受弯矩,肯定不能选杆单元。
对于梁单元,常用的有beam3,beam4,beam188这三种,他们的区别在于:1)beam3是2D的梁单元,只能解决2维的问题。
2)beam4是3D的梁单元,可以解决3维的空间梁问题。
3)beam188是3D梁单元,可以根据需要自定义梁的截面形状。
2.对于薄壁结构,是选实体单元还是壳单元?对于薄壁结构,最好是选用shell单元,shell单元可以减少计算量,如果你非要用实体单元,也是可以的,但是这样计算量就大大增加了。
而且,如果选实体单元,薄壁结构承受弯矩的时候,如果在厚度方向的单元层数太少,有时候计算结果误差比较大,反而不如shell单元计算准确。
实际工程中常用的shell单元有shell63,shell93。
shell63是四节点的shell单元(可以退化为三角形),shell93是带中间节点的四边形shell单元(可以退化为三角形),shell93单元由于带有中间节点,计算精度比shell63更高,但是由于节点数目比shell63多,计算量会增大。
对于一般的问题,选用shell63就足够了。
1 引言在ANSYS平台上,所谓子结构技术就是将一组单元用矩阵凝聚为一个单元过程的技术,切吧这个单一的矩阵单元称为超单元。
在ANSYS分析中,超单元可以象其他单元类型一样使用。
唯一的区别就是必须先进行结构生成分析以生成能够利用的超单元。
但子结构并非在所有ANSYS模块中都能利用,目前ANSYS子结构技术可以在ANSYS/Mutiphysics,ANSYS/Mechanical和ANSYS/Structural中使用。
在ANSYS平台上,使用子结构的目的主要是为了节省机时,并且允许在比较有限的计算机设备资源的基础上求解超大规模的问题。
比如进行非线性分析和带有大量重复几何结构的分析。
在非线性分析中,可以将模型线性部分作成子结构,这部分的单元矩阵就不用在非线性迭代过程中重复计算。
而在有重复几何结构的模型中(如有四条腿的桌子),可以对于重复的部分生成超单元,然后将它拷贝到不同的位置,这样做可以节省大量的计算时间和计算机资源。
子结构还用于模型有大转动的情况下。
对于这些模型,ANSYS假定每个结构都是围绕其质心转动的。
在三维情况下,子结构有三个转动自由度和三个平动自由度。
在大转动模型中,用户在使用部分之前无须对子结构施加约束,因为每个子结构都是作为一个单元进行处理,是允许刚体位移的。
对于大型三维问题的分析而言,需用磁盘空间相对于一个普通计算机系统来说太庞大了,在这种情况下,用户可以通过子结构将问题分块进行分析,从而使得每一块对于计算机系统来说都是可以计算和承受的。
2 ANSYS子结构使用步骤ANSYS子结构使用过程分为以下三个步骤:1)ANSYS子结构生成部分生成部分就是将普通的有限元单元凝聚为一个超单元。
凝聚是通过定义一组主自由度来实现的。
主自由度用于定义超单元与模型中其他单元的边界,提取模型的动力学特性。
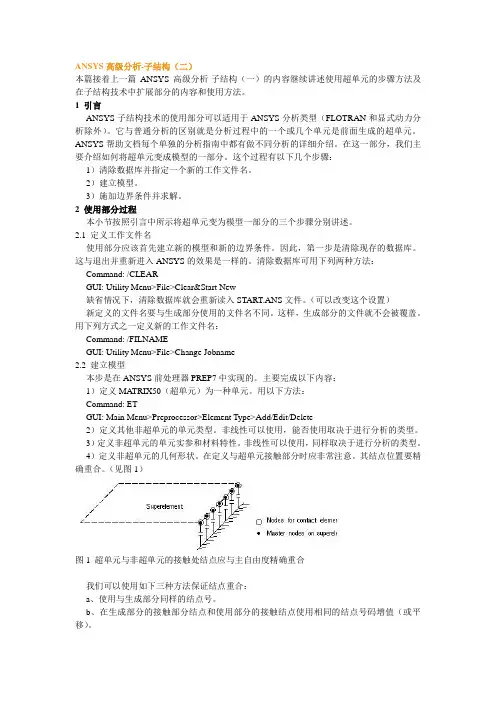
图1是一个板状构件用接触单元分析的示意。
由于接触单元需要迭代计算,将板状构件形成子结构将显著地节省机时。
ANSYS 中的超单元摘自htbbzzg的博客,网易从 8.0 版开始,ANSYS 中增加了超单元功能,本文通过一些实际例子,探讨了 ANSYS 中超单元的具体使用。
1. 使用超单元进行静力分析根据 ANSYS 帮助文件,使用超单元的过程可以划分为三个阶段 (称为 Pass):(1) 生成超单元模型 (Generation Pass)(2) 使用超单元数据 (Use Pass)(3) 扩展模型 (Expansion Pass)下面以一个例子加以说明:一块板,尺寸为 20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型 se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为 20×2。
然后定义单元类型 shell63;定义实常数 1 为: 2 (板厚度)。
材料性能:弹性模量 E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为 mm-s-N-MPa。
采用边长 1 划分单元;一端设置位移约束 all,另一端所有 (21 个) 节点各承受 Z 向力 5。
计算模型如下图:静力分析的计算结果如下:为了后面比较的方便,分别给出两个 area 上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照 ANSYS 使用超单元的要求,超单元与非超单元部分的界面节点必须一致 (重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用 ANSYS 中提供的 mesh200 单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作 (如偏移节点号等) 以满足这一要求。
对于本例,采用另一办法,即先建立整个模型,然后再划分超单元和非超单元。
ANSYS中的超单元从8.0版开始,ANSYS中增加了超单元功能,本文通过一些实际例子,探讨了ANSYS 中超单元的具体使用。
1 使用超单元进行静力分析根据ANSYS帮助文件,使用超单元的过程可以划分为三个阶段(称为Pass):(1) 生成超单元模型(Generation Pass)(2) 使用超单元数据(Use Pass)(3) 扩展模型(Expansion Pass)以下摘自htbbzzg邹老师博客,请勿乱传!下面以一个例子加以说明:一块板,尺寸为20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为20×2。
然后定义单元类型shell63;定义实常数1为: 2 (板厚度)。
材料性能:弹性模量E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为mm-s-N-MPa。
采用边长1划分单元;一端设置位移约束all,另一端所有(21个)节点各承受Z向力5。
计算模型如下图:静力分析的计算结果如下:为了后面比较的方便,分别给出两个area上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照ANSYS使用超单元的要求,超单元与非超单元部分的界面节点必须一致(重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用ANSYS中提供的mesh200单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作(如偏移节点号等)以满足这一要求。
对于本例,采用另一办法,即先建立整个模型,然后再划分超单元和非超单元。
即:将上述模型分别存为se_1.db (超单元部分)和se_main.db (非超单元部分)两个文件,然后分别处理。
ANSYS 中的超单元摘自htbbzzg的博客,网易从 8.0 版开始,ANSYS 中增加了超单元功能,本文通过一些实际例子,探讨了 ANSYS 中超单元的具体使用。
1.使用超单元进行静力分析根据 ANSYS 帮助文件,使用超单元的过程可以划分为三个阶段 (称为Pass):(1) 生成超单元模型 (Generation Pass)(2) 使用超单元数据 (Use Pass)(3) 扩展模型 (Expansion Pass)下面以一个例子加以说明:一块板,尺寸为 20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型 se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为 20×2。
然后定义单元类型 shell63;定义实常数 1 为: 2 (板厚度)。
材料性能:弹性模量 E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为 mm-s-N-MPa。
采用边长 1 划分单元;一端设置位移约束 all,另一端所有 (21 个) 节点各承受 Z 向力 5。
计算模型如下图:an dAl l t h i n g s i n t h e i r b e i n g a re go od fo r静力分析的计算结果如下:为了后面比较的方便,分别给出两个 area 上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照 ANSYS 使用超单元的要求,超单元与非超单元部分的界面节点必须一致 (重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用 ANSYS 中提供的 mesh200 单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作 (如偏移节点号等) 以满足这一要求。
ANSYS单元类型选择方法2009-04-10 11:01最近在学习ANSYS,收集到一些资料,跟大家分享一下:还有心得体会将在后面写出来跟同行们交流!下面是有关ANSYS分析中的单元选择方法:一、单元类型选择概述:ANSYS的单元库提供了100多种单元类型,单元类型选择的工作就是将单元的选择范围缩小到少数几个单元上;单元类型选择方法:1.设定物理场过滤菜单,将单元全集缩小到该物理场涉及的单元;二、单元类型选择方法(续一)2.根据模型的几何形状选定单元的大类,如线性结构则只能用“Plane、Shell”这种单元去模拟;3.根据模型结构的空间维数细化单元的类别,如确定为“Beam”单元大类之后,在对话框的右栏中,有2D 和3D的单元分类,则根据结构的维数继续缩小单元类型选择的范围;三、单元类型选择方法(续二)4.确定单元的大类之后,又是也可以根据单元的阶次来细分单元的小类,如确定为“Solid-Quad”,此时有四种单元类型:Quad 4node 42 Quad 4node 183 Quad 8node 82 Quad 8node 183 前两组即为低阶单元,后两组为高阶单元;四、单元类型选择方法(续三)5.根据单元的形状细分单元的小类,如对三维实体,此时则可以根据单元形状是“六面体”还是“四面体”,确定单元类型为“Brick”还是“Tet”;五、单元类型选择方法(续四)6.根据分析问题的性质选择单元类型,如确定为2D的Beam单元后,此时有三种单元类型可供选择,如下:2D elastic 3 2Dplastic 23 2D tapered 54,根据分析问题是弹性还是塑性确定为“Beam3”或“Beam4”,若是变截面的非对称的问题则用“Beam54”。
六、单元类型选择方法(续五)7.进行完前面的选择工作,单元类型就基本上已经定位在2-3种单元类型上了,接下来打开这几种单元的帮助手册,进行以下工作:仔细阅读其单元描述,检查是否与分析问题的背景吻合、了解单元所需输入的参数、单元关键项和载荷考虑;了解单元的输出数据;仔细阅读单元使用限制和说明。
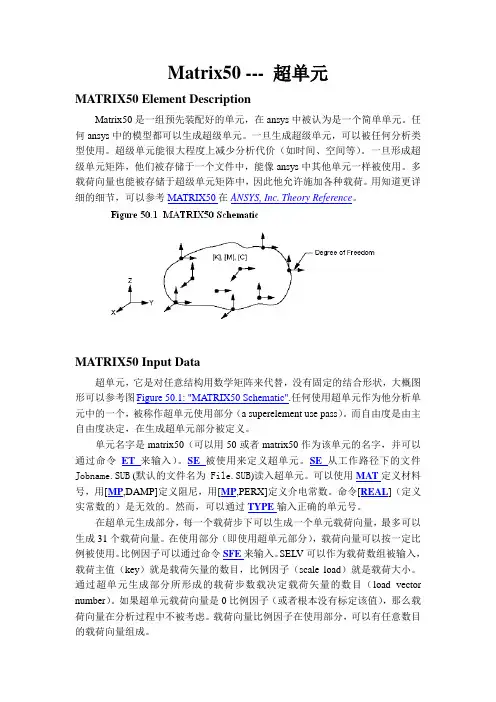
Matrix50 --- 超单元MATRIX50 Element DescriptionMatrix50是一组预先装配好的单元,在ansys中被认为是一个简单单元。
任何ansys中的模型都可以生成超级单元。
一旦生成超级单元,可以被任何分析类型使用。
超级单元能很大程度上减少分析代价(如时间、空间等)。
一旦形成超级单元矩阵,他们被存储于一个文件中,能像ansys中其他单元一样被使用。
多载荷向量也能被存储于超级单元矩阵中,因此他允许施加各种载荷。
用知道更详细的细节,可以参考MATRIX50在ANSYS, Inc. Theory Reference。
MATRIX50 Input Data超单元,它是对任意结构用数学矩阵来代替,没有固定的结合形状,大概图形可以参考图Figure 50.1: "MATRIX50 Schematic".任何使用超单元作为他分析单元中的一个,被称作超单元使用部分(a superelement use pass)。
而自由度是由主自由度决定,在生成超单元部分被定义。
单元名字是matrix50(可以用50或者matrix50作为该单元的名字,并可以通过命令ET来输入)。
SE被使用来定义超单元。
SE从工作路径下的文件Jobname.SUB (默认的文件名为File.SUB)读入超单元。
可以使用MAT定义材料号,用[MP,DAMP]定义阻尼,用[MP,PERX]定义介电常数。
命令[REAL](定义实常数的)是无效的。
然而,可以通过TYPE输入正确的单元号。
在超单元生成部分,每一个载荷步下可以生成一个单元载荷向量,最多可以生成31个载荷向量。
在使用部分(即使用超单元部分),载荷向量可以按一定比例被使用。
比例因子可以通过命令SFE来输入。
SELV可以作为载荷数组被输入,载荷主值(key)就是载荷矢量的数目,比例因子(scale load)就是载荷大小。
通过超单元生成部分所形成的载荷步数载决定载荷矢量的数目(load vector number)。
ANSYS高级分析-子结构(二)本篇接着上一篇ANSYS高级分析-子结构(一)的内容继续讲述使用超单元的步骤方法及在子结构技术中扩展部分的内容和使用方法。
1 引言ANSYS子结构技术的使用部分可以适用于ANSYS分析类型(FLOTRAN和显式动力分析除外)。
它与普通分析的区别就是分析过程中的一个或几个单元是前面生成的超单元。
ANSYS帮助文档每个单独的分析指南中都有做不同分析的详细介绍。
在这一部分,我们主要介绍如何将超单元变成模型的一部分。
这个过程有以下几个步骤:1)清除数据库并指定一个新的工作文件名。
2)建立模型。
3)施加边界条件并求解。
2 使用部分过程本小节按照引言中所示将超单元变为模型一部分的三个步骤分别讲述。
2.1 定义工作文件名使用部分应该首先建立新的模型和新的边界条件。
因此,第一步是清除现存的数据库。
这与退出并重新进入ANSYS的效果是一样的。
清除数据库可用下列两种方法:Command: /CLEARGUI: Utility Menu>File>Clear&Start New缺省情况下,清除数据库就会重新读入START.ANS文件。
(可以改变这个设置)新定义的文件名要与生成部分使用的文件名不同。
这样,生成部分的文件就不会被覆盖。
用下列方式之一定义新的工作文件名:Command: /FILNAMEGUI: Utility Menu>File>Change Jobname2.2 建立模型本步是在ANSYS前处理器PREP7中实现的。
主要完成以下内容:1)定义MA TRIX50(超单元)为一种单元。
用以下方法:Command: ETGUI: Main Menu>Preprocessor>Element Type>Add/Edit/Delete2)定义其他非超单元的单元类型。
非线性可以使用,能否使用取决于进行分析的类型。
3)定义非超单元的单元实参和材料特性。
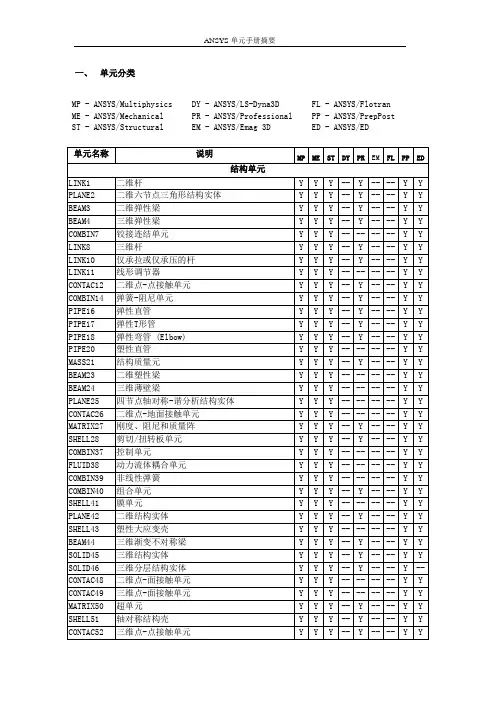
一、单元分类MP - ANSYS/Multiphysics DY - ANSYS/LS-Dyna3D FL - ANSYS/Flotran ME - ANSYS/Mechanical PR - ANSYS/Professional PP - ANSYS/PrepPost ST - ANSYS/Structural EM - ANSYS/Emag 3D ED - ANSYS/EDLINK1—二维杆单元单元描述:LINK1单元有着广泛的工程应用,比如:桁架、连杆、弹簧等等。
这种二维杆单元是杆轴方向的拉压单元,每个节点有2个自由度:沿节点坐标系x、y方向的平动。
就象在铰接结构中的表现一样,本单元不承受弯矩。
单元的详细特性请参考理论手册。
三维杆单元的描述参见LINK8。
下图是本单元的示意图。
PLANE2—二维6节点三角形结构实体单元单元描述:PLANE2是与8节点PLANE82单元对应的6节点三角形单元。
单元的位移特性是二次曲线,适合于模拟不规则的网格(比如由不同的CAD/CAM系统得到的网格)。
本单元由六个节点定义,每个节点有2个自由度:沿节点坐标系x、y 方向的平动。
本单元可作为平面单元(平面应力或平面应变)或者作为轴对称单元使用。
本单元还具有塑性、蠕变、膨胀、应力刚化、大变形、大应变等功能。
详细特性请参考理论手册。
下图是本单元的示意图。
BEAM3二维弹性梁单元BEAM3是一个轴向拉压和弯曲单元,每个节点有3个自由度:沿节点坐标系x、y方向的平动和绕z轴的转动。
单元的详细特性请参考理论手册。
其它的二维梁单元是塑性梁单元(BEAM23)和变截面非对称梁单元(BEAM54)。
下图是本单元的示意图。
BEAM4三维弹性梁单元单元描述:BEAM4是一个轴向拉压、扭转和弯曲单元,每个节点有6个自由度:沿节点坐标系的x、y、z方向的平动和绕x、y、z轴的转动。
本单元具有应力刚化和大变形功能。
在大变形(有限转动)分析中允许使用一致切线刚度矩阵选项。
把收集到得ANSYS单元类型向大家交流下。
Mass21是由6个自由度的点元素,x,y,z三个方向的线位移以及绕x,y,z轴的旋转位移。
每个自由度的质量和惯性矩分别定义。
Link1可用于各种工程应用中。
根据应用的不用,可以把此元素看成桁架,连杆,弹簧,等。
这个2维杆元素是一个单轴拉压元素,在每个节点都有两个自由度。
X,y,方向。
铰接,没有弯矩。
Link8可用于不同工程中的杆。
可用作模拟构架,下垂电缆,连杆,弹簧等。
3维杆元素是单轴拉压元素。
每个点有3个自由度。
X,y,z方向。
作为铰接结构,没有弯矩。
具有塑性,徐变,膨胀,应力强化和大变形的特性。
Link10 3维杆元素,具有双线性劲度矩阵的特性,单向轴拉(或压)元素。
对于单向轴拉,如果元素变成受压,则硬度就消失了。
此特性可用于静力钢缆中,当整个钢缆模拟成一个元素时。
当需要静力元素能力但静力元素又不是初始输入时,也可用于动力分析中。
该元素是shell41的线形式,keyopt(1)=2,’cloth’选项。
如果分析的目的是为了研究元素的运动,(没有静定元素),可用与其相似但不能松弛的元素(如link8和pipe59)代替。
当最终的结构是一个拉紧的结构的时候,Link10也不能用作静定集中分析中。
但是由于最终局于一点的结果松弛条件也是有可能的。
在这种情况下,要用其他的元素或在link10中使用‘显示动力’技术。
Link10每个节点有3个自由度,x,y,z方向。
在拉(或压)中都没有抗弯能力,但是可以通过在每个link10元素上叠加一个小面积的量元素来实现。
具有应力强化和大变形能力。
Link11用于模拟水压圆筒以及其他经受大旋转的结构。
此元素为单轴拉压元素,每个节点有3个自由度。
X,y,z方向。
没有弯扭荷载。
Link180可用于不同的工程中。
可用来模拟构架,连杆,弹簧,等。
此3维杆元素是单轴拉压元素,每个节点有3个自由度。
X,y,z方向。
作为胶接结构,不考虑弯矩。
ANSYS 中的超单元- 瞬态响应分析(3)2010-11-26 07:55:47| 分类:ANSYS 一般| 标签:瞬态响应超单元|举报|字号大中小订阅(3) 将结果扩展到超单元部分如果在生成超单元阶段产生的 .EMAT、.ESAV、.SUB、.TRI、.DB 以及 .SEID 文件,和使用该超单元的模型求解时生成的 .DSUB 文件都是可用的,则可以将结果扩展到超单元部分。
清除当前模型,将Jobname 改为超单元模型文件名(se_r1),读入超单元模型,转换为Solution 模块,激活ExpansionPass:命令:EXPASSGUI:Main Menu -> Solution -> Analysis Type -> Expansion Pass在出现的表单中:ExpansionPass -> ON然后读取超单元矩阵 .SUB 以及非超单元模型求解时,为使用的超单元模型生成的数据文件 .DSUB:命令:SEEXPGUI:Main Menu -> Solution -> Load Step Opts -> Single Expand-> Expand Superelements然后在SEEXP 表单中分别输入超单元文件的 .sub 文件名和使用该超单元的主结构在求解时生成的 .dsub 文件名:图60 SEEXP 命令表单然后选择要扩展的时间点或子步数:命令:EXPSOLGUI:Main Menu -> Solution -> Load Step Opts -> SingleExpand-> By Loadstep然后在EXPSOL 表单中分别输入要扩展的时间点或子步编号(可以在主结构中,后处理时由Results Summary 查到),注意每次只能扩展一个模态:图61 选择要扩展的模态然后进行求解,求解完毕,可以到后处理查看计算结果。
ansys各种单元概述ansys软件不同于其它的有限元软件(如abaqus、nastran等),因为ansys软件允许用户选择多种单元类型下面简要的介绍了ansys的各种单元,可以帮助初学者初步认识这些单元,如果具体使用时,还应仔细阅读帮助文件线单元线单元主要有:杆单元、梁单元。
1杆单元杆单元主要用于桁架和网格计算。
属于只受拉、压力的线单元pJ。
主要用米模拟弹簧,螺杆,预应力螺杆利薄膜桁架等模型。
其主要的类型有:(1)LINK1是个二维杆单元,可刚作桁架、连杆或弹簧。
(2)LINK8是个三维杆单元,可用作桁架、缆索、连杆、弹簧等模型。
(3)LINK10是个三维仅受拉伸或压缩杆单元,可用于将整个钢缆刚一个单元来模拟的钢缆静力。
2梁单元梁单元主要用于框架结构计算。
属于既受拉、压力,又有弯曲应力的线单元。
主要用于模拟螺栓,薄壁管件,C型截面构件,角钢或细长薄膜构件。
其主要的类型有:(1)BEAM3是个二维弹性粱单元,可用于轴向拉伸、压缩和弯曲单元。
(2)BEAM4是个三维弹性梁单元,可用于轴向拉伸、压缩、扭转和弯曲单元。
(3)BEAM54是个二维弹性渐变不对称梁单元,可用于分析拉伸、压缩和弯曲功能的单轴向单元。
(4)BEAM44是个三维渐变不对称梁单元,可用_丁分析拉伸、压缩、扭转利弯曲功能的单轴单元。
(5)BEAMl88是个三维线性有限应变梁单元,可用于分析从细长到中等粗短的梁结构。
(6)BEAMl89是个三维二次有限应变梁单元,可刚于分析从细长到中等粗短的梁结构。
2.2管单元(1)PIPE16是三维弹性直管单元,可用于分析拉压、扭转和弯曲的单轴向单元。
(2)PIPE17是三维弹性T形管单元,可用于分析拉压、扭转和弯曲T形管单轴单元。
(3)PIPEl8是弹性弯管单元(肘管),可用丁分析拉伸、压缩、扭转和弯曲性能的环形单轴单元。
(4)PIPE20是个塑性直管单元,可用于分析拉压、弯曲利扭转的单轴单元。
ANSYS中单元类型介绍1Structural Mass1、3D mass 21提供集中质量是各种有限元软件模拟实际的很好方式,如果某些区域我们并不是太关心,但是其质量和惯性矩会显著地影响最终结果,比如像你提到的动力学的例子,还有计算结构的弯曲应力、挠度等等。
ANSYS提供了21号质量单元用于这些问题的模拟,它有6个自由度,三个方向的平动和转动,不同方向的质量和惯性矩可能被赋予到相应的坐标方向进行计算。
mass21的位置一般会位于被简化区域的质心处,可以采用刚性单元连接分析结构的相接部位,典型的有rbe2,rbe3。
rbe2可以节点与节点相连,rbe3一般是节点与边的连接方式。
rbe2是通过耦合位移自由度的方式传递载荷,rbe3(均方加权刚性单元)根据质量单元的与相连接边上节点位置自动分配载荷给相关的节点。
弹簧振子系统模态分析一般就用mass21单元。
Solid1、Quad 4 node 182182单元可用来对固体结构进行二维建模。
182单元可以当作一个平面单元,或者一个轴对称单元。
它由4个结点组成,每个结点有2个自由度,分别在x,y方向。
这个单元有可塑性,超弹性,大变形,大应变,应力强化等特性。
它也可以用来模拟不可压缩的弹塑性材料和不可压缩的超弹性材料。
(有称四方)Contact1、2D Target 169Targe169是用来与接触面(conta171,conta172,conta175)相联系的二维目标面。
接触单元本身覆盖在实体单元的表面,代表着与潜在的目标面(targe169来定义)相对应的变形实体边界。
目标面被一系列的目标块单元离散了,并且与接触面通过共用的一组实常数号来形成接触对。
用户可以在目标单元块上施加任意平动的位移,转动的角度,温度,电压,和磁力。
也可以在目标单元上施加力或转矩。
参考ansys理论手册上的targe169单元更详细的解释。
可用targe170 3D目标单元描述3D目标面。
ansys单元划分技巧众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。
在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。
在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。
一、自由网格划分自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。
通常情况下,可利用ANSYS的智能尺寸控制技术(SMARTSIZE 命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。
对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。
同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。
如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非退化的四面体单元,减少每个单元的节点数量,提高求解效率。
在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。
对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。
ANSYS 中的超单元摘自htbbzzg的博客,网易从 8.0 版开始,ANSYS 中增加了超单元功能,本文通过一些实际例子,探讨了 ANSYS 中超单元的具体使用。
1. 使用超单元进行静力分析根据 ANSYS 帮助文件,使用超单元的过程可以划分为三个阶段 (称为 Pass):(1) 生成超单元模型 (Generation Pass)(2) 使用超单元数据 (Use Pass)(3) 扩展模型 (Expansion Pass)下面以一个例子加以说明:一块板,尺寸为 20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型 se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为 20×2。
然后定义单元类型 shell63;定义实常数 1 为: 2 (板厚度)。
材料性能:弹性模量 E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为 mm-s-N-MPa。
采用边长 1 划分单元;一端设置位移约束 all,另一端所有 (21 个) 节点各承受 Z 向力 5。
计算模型如下图:静力分析的计算结果如下:为了后面比较的方便,分别给出两个 area 上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照 ANSYS 使用超单元的要求,超单元与非超单元部分的界面节点必须一致 (重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用 ANSYS 中提供的 mesh200 单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作 (如偏移节点号等) 以满足这一要求。
对于本例,采用另一办法,即先建立整个模型,然后再划分超单元和非超单元。
即:将上述模型分别存为 se_1.db (超单元部分) 和 se_main.db (非超单元部分) 两个文件,然后分别处理。
对于 se_1.db 模型,按照超单元方式进行处理。
由于模型及边界条件已建立,只需删除前半段上的划分,结果就是超单元所需的模型。
然后直接进入创建超单元矩阵的操作,首先说明一下创建超单元矩阵的一般步骤:A 进入求解模块:命令:/SoluGUI:Main menu -> SolutionB 设置分析类型为“子结构或部件模态综合“命令:ANTYPEGUI :Main menu -> Solution -> Analysis Type -> New Analysis选择 Substructuring/CMS (子结构或部件模态综合)C 设置子结构选项命令:SEOPTGUI: Main menu -> Solution -> Analysis Type -> Analysis Options设置内容有:方程求解方法 (波前法–默认,或稀疏矩阵法–推荐);要求生成的矩阵,可以是:刚度矩阵;刚度和质量矩阵;刚度、质量和阻尼矩阵 (稀疏矩阵法不能生成阻尼矩阵);要求输出到 output 窗口的矩阵 (矩阵和载荷矢量或仅输出载荷矢量,默认不输出) ;扩展超单元的方法 (后续操作时,对本超单元扩展时使用的方法),默认是回代法(backsubstitution method),需要存储主自由度的三角矩阵 (波前法为 sebname.tri,稀疏矩阵法为 sename.LNxx);完全求解方法 (Full resolve method 不存储任何三角矩阵)。
随着问题规模加大,三角矩阵可能很大;完全求解方法不需要三角矩阵,但花费时间较长,且不能重启动子结构分析 (对于不同的载荷矢量)。
质量矩阵公式:是否使用集中质量矩阵,推荐用一致质量矩阵。
D 选择主自由度命令:MGUI: Main menu -> Solution -> Master DOFs -> User Selected -> Define 主自由度是超单元和其它单元之间的界面,必须确保将超单元与其它单元的界面上的所有节点自由度定义为主自由度。
假如模型中除了超单元外没有其它单元,也必须定义主自由度。
在将超单元用于动力分析时,主自由度的动力特性应能代表超单元的动力特性。
对于在使用超单元时将被定义为约束或施加载荷的节点,应该定义为主自由度 (如果它们也位于当前的超单元中)。
对于大挠度问题或使用 SETRAN 命令的情况,主节点的 6 个自由度都应作为主自由度。
本例中选择超单元外端面上所有节点的所有自由度作为主自由度。
一般情况均推荐选择相应主节点的 All 自由度。
E 在超单元上施加载荷作为超单元的结构可以施加任意载荷,但要记住:程序会生成一个载荷矢量,其中包含了施加的所有载荷。
对于每个载荷步,在超单元文件中写一个等效的载荷矢量,最多可以写 31 个载荷矢量。
在超单元结构中可以使用非零位移约束,并作为载荷矢量的一部分。
求解后对超单元进行结果扩展时,对于有非零位移的载荷步,其数据库必须匹配,否则需再次施加非零位移约束后再进行结果扩展。
可以在使用超单元时再定义载荷和约束,此时应注意将相应节点选为主自由度节点。
同样也可以在使用超单元时再定义惯性力 (加速度或角速度),但在超单元部分要生成质量矩阵。
如果在使用超单元时需要对其进行旋转,推荐这样做,因为超单元的载荷矢量是随着超单元一起转动的。
注意:如果生成质量矩阵,推荐在使用超单元时再施加约束,但要注意将约束节点选为主自由度。
如果要施加加速度载荷,建议再生成超单元时施加,而不要施加到简缩的质量矩阵上。
对于有大转动的问题,推荐在使用超单元时再施加约束。
F 设置载荷步选项在生成超单元的阶段,唯一有效的载荷步选项是设置阻尼。
以上内容设置完毕,存储模型并求解。
对于本例,首先选择新的求解类型:设置分析选项:定义主自由度:然后将模型存盘并求解。
求解后将生成超单元文件 se_1.sub。
(2) 使用超单元使用超单元的过程是:A 建立新模型对于本例,将se_1.db 文件存盘,点击File -> Clear & Start New ... 菜单项,修改Jobname 为se_main,,Resume 模型。
此时读入的模型仍是个完整的模型,在前处理的 Mesh 下,清除后半段 area 上的网格,只保留前半段area 上的网格 (以及已经施加的节点 Z 向载荷向载荷)。
图 10 非超单元部分的模型为了使用超单元,除了其它单元类型外,还需要定义单元类型Matrix50 (超单元)。
图 11 定义超单元类型在对非超单元部分建模时,必须确保其界面节点与超单元模型的界面节点精确匹配且最好节点编号也完全一致,否则需要偏移节点编号或在超单元节点和非超单元节点之间建立耦合,或由老的超单元模型创建一个新的超单元模型(SETRAN 命令),其界面节点与非超单元模型相匹配。
对于本例,由于非超单元模型与超单元模型都是由同一个整体模型修改而来,故其界面节点的位置和编号都是完全相同的。
B 读入超单元矩阵首先设置单元属性为Superelement:命令:命令:TypeGUI: Main menu -> Preprocessor -> Modeling -> Create -> Elements -> Elem Attributes -> Type -> Superelements图 12 定义单元属性为超单元然后读入超单元矩阵se_1.sub:命令:命令:SEGUI: Main menu -> Preprocessor -> Modeling -> Create -> Elements -> Superelements -> From .SUB File读入se_1.sub 文件,自动与非超单元部分组装到一起。
可以通过Utility 菜单的 List -> Other -> Superelem Data 列出超单元 se_1 的数据:现在应该施加超单元载荷,然后将模型存盘并求解 (一般的静力求解)。
求解后存盘,再进行后处理:(3) 将结果扩展到超单元部分如果在生成超单元阶段产生的.EMAT、、.ESAV、.SUB、、.TRI、.DB、以及.SEID 文件,和使用该超单元的模型求解时生成的 .DSUB 文件都是可用的,则可以将结果扩展到超单元部分。
清除当前模型,将Jobname 改为超单元模型文件名(se_1),读入超单元模型,转换为Solution 模块,激活 ExpansionPass:命令:命令:EXPASSGUI: Main Menu -> Solution -> Analysis Type -> Expansion Pass在 EXPASS 表单中,设置: ExpansionPass -> ON然后读取超单元矩阵 .SUB 、以及非超单元模型求解时,为使用的超单元模型生成的数据文件.DSUB:命令命令: SEEXPGUI: Main Menu -> Solution -> Load Step Opts -> Single Expand-> Expand Superelements然后在SEEXP 表单中分别输入超单元文件的 .sub 文件名和使用该超单元的主结构在求解时生成的.dsub 文件名:然后进行求解 -> solve,求解完毕,可以到后处理查看计算结果。
注意此时并不生成.rst 文件,但可以直接查看计算结果。
对于超单元部分,相应的位移和 Von Mises 应力云图分别见图 18 和图 19。
如果存在完整的结构模型 (例如 se_all.db),则可以显示整个结构的结果,具体操作方法是:在将 Jobname 改为 se_1 后,不是读取其本身,而是 Resume se_all.db,然后只选择超单元部分的单元和节点,并按照前面相同的办法对结果进行扩展。
结果扩展完成后,显示整个结构的单元和节点,然后进行后处理。
进入 Post1 后,首先执行:Data & File Opts -> Read Single Result File -> 选择se_1.rst;再点击 Read Result -> First,从 se_1.rst 中读取结果。
然后执行:Data & File Opts -> Read Single Result File -> 选择 se_2.rst;再点击Read Result -> First,从 se_2.rst 中读取结果。