C51单片机常用接口电路设计
- 格式:ppt
- 大小:2.26 MB
- 文档页数:90
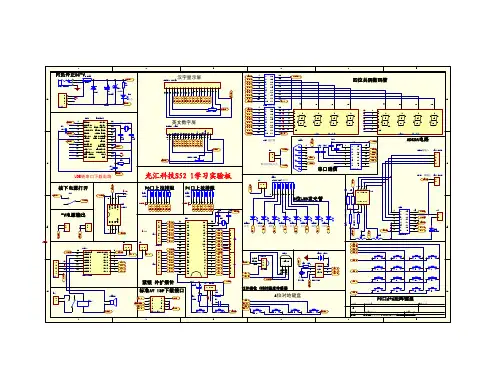
c51单片机电路原理
单片机是一种集成电路,它集成了CPU、内存、输入输出接口等组成部分,广泛应用于各种电子设备中。
C51单片机是一种经典且常用的单片机型号,具有强大的处理能力和广泛的应用领域。
C51单片机的电路原理是指将C51单片机与其他组件(如传感器、显示器、电
机等)进行相连的电路。
这些电路包括供电电路、时钟电路、复位电路、引脚连接电路等。
C51单片机需要一个稳定的电源供电。
一般情况下,我们会使用5V直流电源
来供电,通过稳压器和滤波电容确保电压的稳定性。
C51单片机内部需要一个精确的时钟频率来进行工作。
为了提供稳定的时钟信号,我们需要添加一个晶体振荡器电路,通常通过连接一个石英晶体和补偿电容来实现。
晶体振荡器的频率可以根据具体应用需求选择。
C51单片机还需要一个复位电路来确保在上电或其他异常情况下能够正确启动。
复位电路一般由复位电路芯片和电阻电容组成,当电路上电或复位信号触发时,通过自动复位电路将C51单片机复位。
最重要的是,C51单片机的引脚需要连接到其他外部组件,以实现输入输出功能。
引脚连接电路包括输入电路和输出电路。
输入电路可以通过电阻分压、开关电路等方式将外部信号输入C51单片机。
而输出电路一般需要添加电流放大器或者
继电器等元件,以控制外部设备的动作。
C51单片机的电路原理主要包括供电电路、时钟电路、复位电路和引脚连接电路。
这些电路的设计和连接要符合C51单片机的规格要求,以确保其正常运行和
稳定性。
在实际应用中,我们需要根据具体需求进行相应的电路设计和调试。
c51单片机控制红外通信接口电路图的设计原理图的求证:注:黑色字体为我的个人阐述,其他颜色字体为单片机手册节选文章。
如图(原图)电路图中电阻R6-R13为多余的,其作用如下文:(这几个电阻是需要的!!起限流和保护单片机,LED的作用,不能少,一般选择220-510欧姆,流过LED电流在10-20毫安为好)2.4 发光二极管显示部分设计有8个发光二极管与单片机的P1口相连,二极管的正极与电源正极相连,负极串联一个电阻与Pl口相连,给Pl口送低电平就得到不同的显示状态。
因为,电阻R6-R13没有参与光的发射和接收所以我认为它是多余的。
去掉后节省出来P1.0-P1.7的引脚,用作他用。
(这不对的,如果你LED接到了P1口,P1就不能做其它用了,如果作其它用的话,LED指示就让你感觉莫名其妙了)2.3 数码显示部分在系统中,选用一个双七段数码管来显示发送和接收的数据。
数码管采用DPY双位七段共阳数码管。
高位的共阳极是lO脚,低位的共阳极是5脚。
由单片机的P O口控制数码管的阴极,P2.6,P2.7口分别控制数码管的高位和低位,当P2口输出数位“0”时,相应的三极管导通。
根据PO口输出不同数位,数码管显示不同的数字,当P2口输出数位“l”时,三极管截止,数码管不显示。
我不需要数码显示部分,而跟他相关的电子元件没有参与红外线的发射和接受,所以我认为直接去掉就行。
(这个有会更好些,因为可以显示的东西会比LED显示效果更好。
前提是你得写单片机程序,要是我在LED 与它之间做取舍的话,我将保留它,舍掉LED,不过编写程序会复杂些)这样一来图中保留了,主要的红外线发射部分的电路图,没有因为删减部分而影响它的正常功能,却剩出了16个引脚。
红外线发射部分的运作原理如下:2.1 发射部分设计红外发送电路包括脉冲振荡器、三极管和红外发射管等部分。
其中脉冲振荡器有NE555定时器、电阻和电容组成,用于产生38 kHz的脉冲序列作为载波信号,红外发射管HG选用Vishay公司生产的TSAL6238,用来向外发射950 nm的红外光束。
5科技创新导报S T y I 高新技术2007N O .35Sc i e nc e an d Tec hno l o gy I nn ov at i on H er al d 科技创新导报1IR IG -B 时间码的格式与规范I R I G -B 格式时间码(简称B 码),图1为B 码(DC 码)示意图。
它是每秒一帧的时间串码,每个码元宽度为10m s,一个时帧周期包括100个码元,为脉宽编码。
码元的"准时"参考点是其脉冲前沿,时帧的参考标志由一个位置识别标志和相邻的参考码元组成,其宽度为8m s;每10个码元有一个位置识别标志:P1,P2,…,P9,P0,宽度均为8m s;PR 为帧参考点;二进制“1”和“0”的脉宽为5m s 和2m s 。
一个时间格式帧从帧参考标志开始,因此连续两个8m s 宽脉冲表明秒的开始,如果从第二个8m s 开始对码元进行编码,分别为第0,1,…,99个码元。
在B 码时间格式中含有天、时、分、秒,时序为秒-分-时-天,所占信息位为:秒7位、分7位、时6位、天10位,其位置在P0~P5之间。
P6~P0包含其他控制信息。
其中“秒”信息:第1,2,3,4,6,7,8码元;“分”信息:第10,11,12,13,15,16,17码元;“时”信息:第20,21,22,23,25,26,27码元;第5,14,24码元为索引标志,宽度为2m s 。
时、分、秒均用B CD 码表示,低位在前,高位在后;个位在前,十位在后。
2B 码解码接口卡设计方案对B 码进行解码就是将B 码中所包含的时、分、秒信息提取出来,转换成计算机能够识别的形式,同时以秒的准时点为参考,生成毫秒信息,一同送入计算机中。
解码的关键在于检测B 码中各个码元的高电平宽度,首先要检测连续两个8m s 宽的码元出现的位置,然后再检测随后的30个码元脉冲宽度,以确定时、分、秒。
这里不检测天的值,天可以直接在计算机上设置。
摘要:本课程设计实现具有按键输入、数据储存、数据通信等功能的单片机系统。
该系统基于C51单片机的USB接口设计,该系统由最小C51单片机系统、USB接口模块组成。
系统实现按键输入数据保存至E2PROM后,可通过USB接口传送至上位机功能。
通过对系统的仿真及实物调试,完成了系统设计,实现了课程设计的要求。
关键字:USB,数据通信,单片机,按键输入,E2PROMAbstract:This course designs the single slice of machine system that the realization has a keystroke, the data functions, such as storage and data correspondence...etc..That system connects a people's design according to USB of C51 single slice of machine, that system from the minimum C51 single slice of machine system, and USB pick up a people mold piece constitute.The system carries out a keystroke data to keep to E2 PROMs, can connect a highest of a people's transmission through USB machine function.Passing is true to imitating of system and the real object adjust to try, completed a system design and carried out the request of course design.Key words:USB, data correspondence, single slice of machine, keystroke, E2PROM目录前言 (1)1.总体设计方案 (2)1.1接口设计方案 (2)1.1.1独立模式即(USB接口芯片外接C51芯片) (2)1.1.2 USB接口芯片集成了MCU (2)1.2系统设计方案 (2)2.系统设计原理 (3)2.1 USB接口简介 (3)2.2 I2C总线简介 (3)3.单元模块设计 (4)3.1 USB硬件电路设计 (4)3.1.1电源电路模块 (4)3.1.2单片机最小系统模块 (5)3.1.3 E2PROM模块: (6)3.1.4 USB接口模块 (7)3.2 USB软件设计 (9)3.2.1主程序介绍: (9)3.2.2 E2PROM写程序: (10)3.2.3 E2PROM读程序: (13)3.2.4 USB接口程序 (14)4.系统功能调试 (15)4.1调试用的软件简介: (15)4.2模块调试过程及结果: (15)5.设计总结 (18)6.参考文献 (19)前言USB是英文Universal Serial BUS的缩写,中文含义是“通用串行总线”。
C51单片机最小系统的电路原理与制作——吴越1 C51单片机最小系统电路图及电路原理单片机最小系统,是指用最少的元件组成并可工作的单片机系统,相关的资料网上或书店都很多。
图1为一个常见的单片机最小系统电路图。
C51最小系统电路由复位电路、时钟电路组成。
另外还需要DC+5V的电源最小系统才能工作。
(1)复位电路:复位电路在单片机系统中很关键,当程序运行不正常或死机时,就需要进行复位,一般有两种复位方式。
①上电复位:由电容C3和电阻R1串联组成,系统一通电,RST脚(9脚)为高电平,这个高电平持续的时间由电路的RC值来决定。
典型的C51单片机当RST脚的高电平持续两个机器周期以上就将复位,适当组合RC的取值就可以保证可靠的复位。
一般C3取10μF、R1取10K。
也有不同取值的,原则是RC组合要在RST脚上产生2个机器周期以上的高电平。
②手动复位:由电阻R2和开关S组成,R2取值没有严格的要求,一般能把复位脚的电压下拉至0.5V以下即可,可以把R2理解为缓冲电阻或与C3、R1组成防抖动电路,也有不用R2的。
单片机通电启动后,电容C3两端的电压持续充电约为5V,此时电阻R1两端的电压接近于0V,RST脚为低电平,系统进入正常工作状态。
当按下开关S时,开关导通,电容被短路,电容释放之存储的电量。
电容两端的电压从5V降到约等于0V,电阻R1两端的电压上升到约等于5V,RST脚为高电平,系统进入复位状态。
(2)时钟电路:时钟电路由晶振CY和C1、C2组成,一般晶振的取值1.2MHz~24MHz。
典型的晶振取11.0592MHz或12MHz,11.0592MHz适用于串口通讯,12MHz适用于定时控制,C1、C2一般取15pF~50pF。
如果要自己设计单片机系统的PCB板,注意,C1、C2要紧靠晶振CY,并且晶振CY和C1、C2要紧靠C51芯片,以保证振荡器可靠的工作。
系统通电后可以检测一下晶振是否起振。
若起振,可以用示波器观察到XTAL2会输出很漂亮的正弦波波型,也可以用万用表测量(用直流档)XTAL2和地之间的电压,可以看到有2V左右的电压(有效电压值)。