气动肌肉外文翻译资料教学提纲
- 格式:pdf
- 大小:955.59 KB
- 文档页数:11
外文文献翻译班级音乐学10-1 姓名学号Vocal music teaching methodAbstract:The traditional vocal music teaching is almost always around ope n throat, breath, throat and other technical problems.V ocal music teaching practi ce, this paper summarizes the different teaching method, with the music as the center of the vocal music teaching method, namely through "has the connotati on of singing training" and "emotion in acoustic band" singing training to culti vate the students' music perception and expression, thus improving the overall singing skills.Build a music centered teaching conceptV ocal music is the music, poetry and singing skills of perfect combination of art.Good singing voice must be based on scientific skills, rich emotional e xperience and strong culture.Therefore, as teachers must be from the "heavy lig ht art technology" the myth of come out, make oneself have high literary acco mplishment, historical culture, language, culture, aesthetic culture and music the ory training, establish a music as the center of the whole teaching idea.As a b ranch of art, music is the important content in the vocal music art, teachers sh ould cultivate students' inner hearing music and music image, in the vocal mus ic teaching practice, through long-term hard music art training, into the practiti oner's creativity, and practitioners of emotion, experience, training and the impr ovement of culture continually promote the performance of vocal music art.Tec hnology and art, that is, voice and mood, always is singing in the flesh is con nected to two parts.The expression of voice and pronunciation, namely and sui to form the whole singing, both inseparable.Singing of vocal musical in singin g on the person's overall, not just by sympathetic voice, smell, or can be doneseparately.Singing is a kind of heart is involved in performing arts, singing al l kinds of factors should be together in a whole gripping perfect art.In other words, only affectionately, craft union, can achieve the moving state that singin g, Chinese artistic effect.With the dialectical unification, supplement each other. Whether it is a professional singer or amateur, in the usual training, to strengt hen the consciousness of the whole singing, the singing voice and emotion exp ression, make sound, words, affection, get into the habit of sing with the mind .Because each person's physical condition is different, the voice also has differe nce, the overall training in vocal music teaching is especially important, it not only includes the whole of the singing respiration training, singing language pr ocessing, singing psychology training and so on, more important still is singing soul - music training.Since started their vocal, combined with music, vocal als o want to have good music.To establish a personalized systemMan's voice, is a musical instrument, one can use different language perfo rmance wonderful Musical Instruments of music.People to do to correct, scienti fic and make good use of voice, the music instrument performance, understandi ng voice physiological structure and the principle is the premise.V oice of peopl e is generally by the vocal cords (including false vocal folds), chest and throat cavity, pharynx, oral, nasal cavity, head of cavity.Sound principle is simple: v ocal cords vibration under the impact of the gas, then the vocal cords vibratio n sound, through the chest cavity, pharynx, throat, mouth, nose, and the resona nce of head cavity, loud and wonderful sound.Timbre, tone and singing ability, is the resonance cavity is to adjust the different results.To do freely adjust th e resonance cavity, must go through strict and formal training.Natural singing with the person's mood, psychology and other muscles, organs, actively coopera te with and coordinate the relationship between the great, even singing activitie s "survival" relationship.Such as: where is the location of throat, breath movem ent, route, the soft palate in different pitch when the state, the movement of your tongue, tongue and jaw movement, how to open mouth, the body how to cooperate with all related to the stand or fall of voice.V oice though on voice principle and physical structure is common, but each person's voice characterist ics are different, in addition to a male, female, children's, particularly of sopra no, alto, bass, and timbre, pronunciation habits, the different language habits, i n addition, there are different physiological and psychological factors, therefore, everyone in the study of vocal music, set up the correct scientific accord wit h the characteristics of their voices sound system is the key.Take practical training methodsV ocal music teaching, difficult, in according to their aptitude.And to do it for different students, there are effective training methods.Several principles in t he teaching process is a must abide by.That to do according to their aptitude, understand students "phase" is the key.Before starting the system training, the t eacher must have a comprehensive understanding to the students.But to underst and a student, is not achieved overnight, need a process.To fully grasp the stu dents' physiological structure, characteristics, habits, language, lack of limit con ditions, and sound in singing, etc, and then make a training plan of the syste m.V ocal music foundation training, like repairing the tower footing, do not hit foundation, not solid, is built up.Learning vocal music often have a bad habit of rush like and others, the teacher also has the phenomenon of the spoil thin gs by excessive enthusiasm.The main reason is to see somebody else's learning progress quickly, the in the mind will try so hard, the in the mind a JiBian r ush, perpetuated this misunderstanding as a result.V ocal music teaching must st ep by step.In the process of basic training, one is to help students establish th e correct concept of vocal music, train students' correct vocal music aesthetic f eeling and the right voice.The second is from the first student sings best starte d training a vowel, gradually transition to other vowel singing and form right, good habits of singing, namely to "never".Three sensibility is raises the student good music and in the basic training, do not light "vocal" is not "sing".Teachers must according to the actual singing ability of students, arranging rich repe rtoire to let the students sing, carefully analysis work, teach students the full p erformance good each a piece of music, even if it is very simple, very small vocal music works, training the students' music sensibility and expression.Four is to exercise the student the correct use of singing breath.In practice, some pe ople like to teach students to look for the gas voice again, causing students so often found, but hard, inflexible, singing breath xinjiang inflexible, we might as well let the students find gas in singing.Actually, singing breath is instinctiv e, mood, state by the way, passion, breath naturally had, never deliberately tak e a deep breath.声乐艺术教学方法探究摘要:传统的声乐教学几乎总是围绕着解决开喉咙、呼吸、喉头等技术问题来进行。

《运动机能学》教学大纲1《运动机能学》教学目标与教学大纲(中英文) (一)中文部分:第一章运动机能学基础知识(24学时)了解运动系统的组成(骨、骨连结、骨骼肌)和功能(运动、支持、保护)以及各组成部分在运动中作用(杠杆、枢纽、动力)。
第一节骨学一、总论1.掌握骨的形态,构造和骨运动中的生物力学问题2.熟悉骨的化学成分和物理性质和运动中的生物化学问题;3.了解骨生发育过程中如何增长和增粗及运动中的生理学问题;4.了解骨的血管、神经和骨的可塑性。
5.了解运动中的解剖学,运动机能障碍学;运动机能学与其它学科的关系;二、躯干骨1.掌握躯干骨的组成。
2.掌握椎骨的一般形态和各部椎骨的特征。
3.掌握胸骨的基本形态结构和分部。
掌握胸骨角的特征和意义。
4.掌握肋的组成和种类,肋骨的一般形态、结构。
熟悉第一肋的特征。
5.掌握躯干骨重要的骨性标志:第七颈推棘突、胸骨角、剑突、骶岬、骶角。
三、四肢骨了解四肢骨的功能及其结构特征。
(一)上肢骨1.掌握上肢骨的组成、名称和位置。
2.掌握肱骨、桡、尺骨的位置、形态及主要结构。
3.熟悉手骨的分部和各骨的形态、结构。
掌握腕骨的排列J顺序。
4.掌握上肢骨重要的骨性标志:肩峰,喙突,肩胛下角,肱骨内、外上髁,尺骨膺嘴,桡骨头,挠骨茎突,尺骨茎突。
(二)下肢骨1.掌握下肢骨的组成、名称和位置。
2.掌握髋骨的位置、形态、组成、各部的主要结构。
3.掌握股骨的位置、形态及其主要结构。
4.了解髌骨的位置。
5.掌握胫、腓骨的位置、形态及其主要结构。
6.了解足骨的分部、形态、结构和位置;掌握跗骨的排列。
7.掌握下肢骨重要的骨性标志:髂峰,髂嵴结节,髂前上棘,髂后上棘,耻骨结节,坐骨结节,股骨大转子,股骨内、外上髁,收肌结节,腓骨头,胫骨粗隆,内、外踝,跟骨结节,第五跖骨粗隆。
四、颅骨1.掌握眶、骨性鼻腔的位置、形态和重要结构。
2.掌握鼻旁窦的概念,以及它们的名称和位置。
3.了解颅的侧面观。
熟悉颅的上面观。

肌肉英语学习计划零基础As a beginner in learning English, I understand the importance of having a well-structured study plan in order to achieve my goals. I have always been interested in improving my English skills, particularly in the area of muscle-related vocabulary and expressions. Therefore, I have put together a comprehensive learning plan to help me make progress in this area.1. Setting clear goalsThe first step in my learning plan is to set clear and achievable goals. I want to improve my muscle-related English vocabulary and expressions so that I can confidently communicate about this topic in both written and spoken English. I will set specific, measurable, achievable, relevant, and time-bound (SMART) goals to keep myself accountable and track my progress.2. Identifying resourcesTo achieve my goals, I will need to identify the best resources available to me. I plan to use a variety of resources such as English learning websites, muscle-related English books and articles, and language exchange partners. I will also make use of online courses and podcasts related to muscle-related topics to further enhance my understanding and vocabulary.3. Creating a study scheduleConsistency is key when it comes to learning a new language. I will create a study schedule that includes dedicated time each day for studying muscle-related English vocabulary and expressions. I will also allocate time for practicing speaking and writing in English to ensure that I am actively using and reinforcing what I have learned.4. Building vocabularyOne of the main focuses of my learning plan is to build my muscle-related English vocabulary. I will start by learning the basic muscle names and their functions. I will also learn common expressions related to muscle health, exercise, and fitness. To make the learning process more engaging, I plan to create flashcards and use mnemonic devices to help me remember new words and phrases.5. Practice speaking and writingIn addition to building my vocabulary, I will also focus on practicing speaking and writing in English. I will engage in conversations with language exchange partners and practice writing short essays or journal entries related to muscle-related topics. I will also seek feedback from native English speakers to help me improve my spoken and written English skills.6. Seeking feedback and improvementTo ensure that I am continuously improving, I will seek feedback from others on my language skills. I will ask for feedback from my language exchange partners, teachers, and other English learners. I will also take note of my own progress and make adjustments to my learning plan as needed.7. Using technology to enhance learningI will take advantage of technology to enhance my learning experience. I will use language learning apps, online dictionaries, and language exchange platforms to supplement my learning. I will also make use of online resources such as videos, podcasts, and social media to immerse myself in English-language content related to muscle health and fitness.8. Immersing myself in the languageFinally, I will strive to immerse myself in the English language as much as possible. I will watch English-language movies and TV shows, listen to English-language music, and read English-language books and articles related to muscle health and fitness. Immersing myself in the language will help me gain a better understanding of the nuances of the language and improve my overall language skills.In conclusion, my muscle-related English learning plan is designed to help me achieve my goals of improving my muscle-related English vocabulary and expressions. By setting clear goals, identifying resources, creating a study schedule, building my vocabulary, practicing speaking and writing, seeking feedback and improvement, using technology to enhance learning, and immersing myself in the language, I am confident that I will make significant progress in my English language skills. With dedication and consistent effort, I am excited to see how my language skills will improve in the coming months.。

McKibben气动人工肌肉的测量和建模Ching-Ping Chou and Blake HannafordMember, ZEEE摘要:本文报道了测量和建模McKibben人工肌肉气动执行机构。
此装置,首先在1950年开发的,包含扩大管周围编织线。
我们通过静态和动态长度张力的测试结果,得出一个线性模型。
并将结果与人体的肌肉属性相比较,以评估是否适合人体肌肉仿真。
McKibben执行器基于生物学的机器人手臂。
一、引言McKibben气动人工肌肉的研究在1950年和1960年,主要是发达的假肢。
他们最近被商业化的日本机器人应用普利司通橡胶公司的J.温特斯博士用来重新设计建造生物力学逼真的骨骼模型。
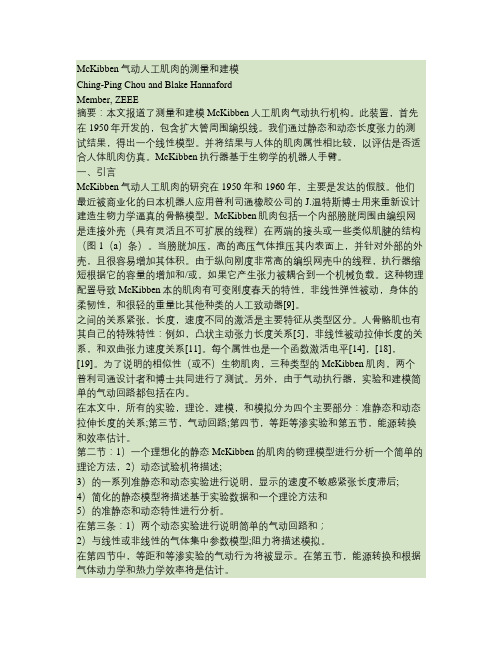
McKibben肌肉包括一个内部膀胱周围由编织网是连接外壳(具有灵活且不可扩展的线程)在两端的接头或一些类似肌腱的结构(图1(a)条)。
当膀胱加压,高的高压气体推压其内表面上,并针对外部的外壳,且很容易增加其体积。
由于纵向刚度非常高的编织网壳中的线程,执行器缩短根据它的容量的增加和/或,如果它产生张力被耦合到一个机械负载。
这种物理配置导致McKibben本的肌肉有可变刚度春天的特性,非线性弹性被动,身体的柔韧性,和很轻的重量比其他种类的人工致动器[9]。
之间的关系紧张,长度,速度不同的激活是主要特征从类型区分。
人骨骼肌也有其自己的特殊特性:例如,凸状主动张力长度关系[5],非线性被动拉伸长度的关系,和双曲张力速度关系[11]。
每个属性也是一个函数激活电平[14],[18],[19]。
为了说明的相似性(或不)生物肌肉,三种类型的McKibben肌肉,两个普利司通设计者和博士共同进行了测试。
另外,由于气动执行器,实验和建模简单的气动回路都包括在内。
在本文中,所有的实验,理论,建模,和模拟分为四个主要部分:准静态和动态拉伸长度的关系;第三节,气动回路;第四节,等距等渗实验和第五节,能源转换和效率估计。
第二节:1)一个理想化的静态McKibben的肌肉的物理模型进行分析一个简单的理论方法,2)动态试验机将描述;3)的一系列准静态和动态实验进行说明,显示的速度不敏感紧张长度滞后;4)简化的静态模型将描述基于实验数据和一个理论方法和5)的准静态和动态特性进行分析。
给气动机器人添上柔性肌肉给气动机器人添上柔性肌肉来自:叶子疏 6小时前 | 阅读原文DIYer: mikey77制作时间: 一天制作难度: ★★★☆☆GEEK指数: ★★★☆☆编译来源用自行配制的硅胶粘土能够轻松制作出气动机器人所需的气动肌肉,我将这种特殊材料命名为“Oogoo”。
这样制成的的硅橡胶肌肉非常便宜且运用灵活,它们可以被制作成任何需要的形状,用来满足各种奇形怪状的机器人的不同需要。
图片中展示了一块六单元的“肘外侧肌”,一块三单元的肌肉,还有一块在低气压下工作的独立肌肉单元。
第二张图片里的气动肌肉处于没有加气压的放松状态。
气动肌肉原理这些机器人用肌肉是用硅橡胶薄片层叠粘结制成的,作为原料的硅胶粘土可以被浇注成任何厚度的薄片,更多关于硅胶粘土的信息请参见:一个肌肉单元包括两块硅橡胶薄片,它们的边缘粘合在一起,中间夹着一层塑料膜,这样就产生了容纳空气的气隙。
这样的简单气囊可以胶结到一起组成多个单元的肌肉块,它可以沿轴线扩张/收缩,也可以在加压时朝侧面弯曲。
这里的图片展示了一块六单元气动肌肉的三维结构。
理想中一块这样的肌肉块可以用3D打印机一次性全部打印出来,但是很遗憾我没有找到能用合理的价格打印硅胶材料的3D打印服务。
所以我只能局限于纸面上的结构图,然后用手工一块块拼装肌肉。
我希望能用3D打印机来制作接下来用于浇注硅橡胶的模具。
制作3维模型时我用了123D软件。
材料•图片里是浇注好准备用于组装一块6单元肌肉的硅胶部件。
○ 玉米淀粉○ 纯硅胶填料○ 塑料杯○ 塑料袋○ 1/16英寸(0.16厘米)厚的塑料板。
我用了酚醛塑料板,但是聚碳酸酯板,压克力板或者其他任意材质的都可以。
○ 6英寸x6英寸(15.24厘米)的胶合板○ 五金店买来的喷漆○ 12V供电的气泵/真空泵○ 12V供电的电磁气阀○ 水族箱用的供气管。
来自亚马逊网购。
○ 雨树滴灌设备。
同样来自亚马逊的网店。
浇注肌肉单元1.切割塑料片:需要将两块6英寸(15.24厘米)见方,1/16英寸(0.16厘米)厚的塑料片用3个小螺栓固定在一起,并在上面用线锯切割出一个2英寸(5.08厘米)直径的圆。
图3 压力—时间关系内。
仿真计算的结果为:从中间位置向左回转到极限位置的仿真结果如图3所示。
3 结论从国外的相关仿真软件分析情况来看,液压仿真展在国外一直受到重视,不断地在进行开拓与完善。
在许多液压技术应用场合,利用液压仿真技术,选择或开发恰当的液压仿真软件系统,通过对系统的动静态特性进行预测,可以大大地缩短液压系统或元件的设计周期,避免因重复试验及加工所带来的昂贵费用,而且可以及早地认识到该系统在动静态特性方面所存在的薄弱环节并加以消除,从而达到优化系统、优化元件、优化参数的目的。
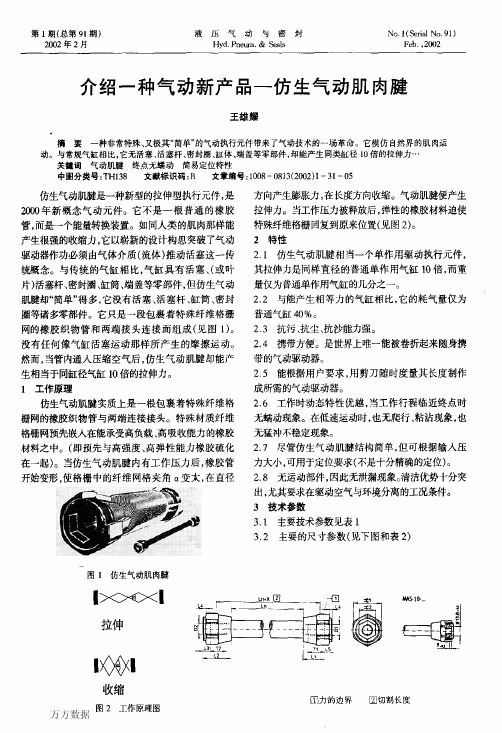
参 考 文 献[1] 程安宁.液压仿真技术的应用与发展[J ].机床与液压,2004(5).气动人工肌肉制作及应用杨 林 韩建海 赵书尚 肖亮子(河南科技大学机电工程学院,河南洛阳 471003)摘 要:气动人工肌肉作为一种新型的气动执行元件,在服务型机器人中得到了越来越多的应用。
本文对气动人工肌肉所需的制作材料、制作过程、工作原理和特性进行了详细的叙述,最后介绍了用制作的气动人工肌肉驱动机械装置的应用实例。
关键词:气动人工肌肉;执行元件;制作;柔顺性;应用中图分类号:TH138.51 文献标识码:A 文章编号:100820813(2007)0320006203Fabrication and Application of Pneumatic Artificial MusclesYA N G L i n ,HA N Jian 2hai ,ZHA O S hu 2shang ,X IA O L iang 2z i(School of Mechatronics Engineering ,Henan University of Science and Technology ,Luoyang ,471003)Abstract :The pneumatic artificial muscles as one kind of new actuators are widely used in the application of service robots.The fabri 2cating materials ,processing ,working principle and characteristics of the pneumatic artificial muscles are described in detail in this ar 2ticle.Finally ,the application example of the mechanical device actuated by fabricated pneumatic artificial muscles is explained in the paper.K ey Words :pneumatic artificial muscles ;actuator ;fabrication ;softness ;application0 概述气动人工肌肉是一种新型的拉伸型气动执行元件,当通入压缩空气时,能像人类的肌肉那样产生很强的收缩力,所以称作气动人工肌肉。
气动肌肉外文翻译资料什么是气动肌肉?气动肌肉(Pneumatic Muscle,简称PM)是一种新型的运动执行器,它是基于气压的软性人工肌肉。
气动肌肉的构造,通常是一个灵活的橡胶袋,当内部填充了气体或液体时,可产生一定程度的收缩或伸展运动。
目前气动肌肉广泛应用于机器人、仿生学和生物医学工程领域。
与传统的机械结构相比,气动肌肉具有更高的柔韧性、高可靠性和低成本等优点。
气动肌肉的研究历史气动肌肉的概念最早出现在20世纪50年代,当时美国波音公司的工程师George Mcknight和Joseph Pawlikowski首次使用气动肌肉研制了一种可在水中自由移动的机器人手臂。
70年代早期,日本学者西川宣也开始在气动肌肉方面进行研究,并于1977年发明了第一款气动肌肉人工手臂。
从此以后,气动肌肉得到了越来越广泛的应用。
气动肌肉的工作原理气动肌肉的运动是通过内部充填和排空压缩空气或液体来实现的。
当气体或液体被灌入气动肌肉内部时,它会充实并产生收缩力,当气体或液体排空时,气动肌肉会恢复原状。
因此,气动肌肉具有多次收缩和松弛的能力,并且它的收缩力可以通过调整气体或液体的压力来实现精密控制。
气动肌肉的优点和缺点相较于其他种类的运动执行器,气动肌肉具有以下优点:•可以实现高自由度运动和柔性机构设计•操作速度快,响应时间短•接口简单,易于控制和编程•操作过程较安静,且污染较少但是,气动肌肉也有以下缺点:•运动控制需要较高的技术水平•稳定性和可靠性相对较差•能耗较高,不适合长时间运转气动肌肉的应用前景气动肌肉在机器人、仿生学和生物医学工程领域具有极大的应用前景。
目前,气动肌肉已广泛应用于以下领域:•机器人航空器和模拟动物•医疗和康复设备•仿生机械臂、手和脚•教育和科研实验总的来说,气动肌肉是一种非常有前景的运动执行器,未来肯定会发挥更重要的作用。
外文翻译ADAPTIVE ROBUST POSTURECONTROL OF A PNEUMATICMUSCLES DRIVEN PARALLELMANIPULATOR气动肌肉驱动并联机器人的自适应性鲁棒姿态控制系别:机械与汽车工程系专业名称:机械设计制造及其自动化学生姓名:学号:指导教师姓名、职称:完成日期 2015年12月21日摘要部分气动机器人由于无法实现摆动关节的自由定位,所以不能进行灵巧、柔顺的抓取操作,从而限制了它在工业领域的广泛应用。
气动肌肉驱动的机器人手臂可以像人类手臂一样进行灵巧,柔顺的抓取操作,但是气动肌肉驱动的并联机械臂的动态模型必然存在严重的参数不确定性,基于不连续的自适应鲁棒控制,对该系统的非线性参数(如气动肌肉的摩擦力和外部干扰)采取有效的控制,以实现显着的姿态轨迹控制。
此次实验结果验证了所提出的自适应鲁棒控制器控制的有效性。
关键词:气动肌肉、并联机器人、自适应鲁棒控制1.介绍气动肌肉是一种类似人类肌肉的新型的柔性机构,它是由橡胶管和交叉编织护套材料组成。
其基本工作原理如下:当橡胶管充气,交叉编织护套横向扩张,导致轴向压缩力与气动肌肉的终点位置的变化。
因此,其沿轴线方向的气动肌肉的位置和力的控制,可以通过调节其橡胶管的内部压力实现。
气动肌肉驱动的并联机器人(PM BY PM)包括三个气动肌肉连接的并联机器人动臂的基础平台,如图1所示。
控制三个气动肌肉的长度,通过旋转运动的三自由度并联机器人可以实现。
这样的并联机器人结合可调刚度和高功率/体积比(气动肌肉并联机构的结构紧凑),可有广泛的应用,如工业自动化和仿生装置。
图1气动肌肉驱动并联机械手的结构气动肌肉动力学模型存在严重的非线性变动参数,包括各种摩擦,迟滞和温度收缩力,这些因素使得气动肌肉的精确位置不能得到控制,这在过去的几年中已经获得了极大的关注。
虽然已完成大量对气动肌肉的控制研究,但他们大多都不考虑气动肌肉的压力,动力学,橡胶的管内的压力和流量之间的动态关系。
没有考虑压力动力学主要处理单位或拮抗肌肉致动器的控制器设计的研究较少。
这项研究需要精确的系统模型和扰动动态下的匹配条件。
在本文中,考虑了并联机器人的气动肌肉示于图驱动的姿态控制,其中每个气动肌肉是由两个快速切换阀控制。
这样的系统不仅能控制一切与气动肌肉有关的状态,也是耦合的多输入多输出(MIMO)增加难度的并联机器人动力学系统。
自适应鲁棒控制方法应用于减少集中未知不确定非线性和参数不确定性,很大程度上在使用一定的鲁棒反馈控制补偿模型不确定性的影响。
所提出的控制器设计明确考虑到交流计数的压力动态的影响。
因此,高跟踪性能的实践验证了所获得的实验结果。
2.动态模型对并联机器人的几何结构如图1所示,它由一个移动平台,基础平台,中心杆和三个气动肌肉组成。
气动肌肉与移动平台和基础平台,由球形关节连接,这是均匀分布在各自的平台上的一个圆圈。
中心柱刚性固定于基座平台,由一个球头连接到移动平台。
并联机器人的姿态是通过三个独立的角度定义。
滚动角度Xθ绕X轴,Yθ俯仰角和偏航角Zθ绕Z轴,双速切换阀是用来调节每个气动肌肉的压力的,而这种组合的组件被称为随后的驱动单元。
假设移动平台的惯性矩阵是I(θ),机械手平行矢量角速度矢量的变换矩阵是G(θ)、球形接头粘性摩擦系数矩阵为 C S = diag([ C S1,S2 S3 ] T C,C),一阶偏微微分运动影响系数矩阵J(θ),三个驱动单元的等效质量矩阵M,在任务空间的扰动 D P(t)和肌肉力量的载体 F M = [ F M1,FM2,FM3 ]^T,这将在下一次节交代。
然后运动平台的动力学模型为每个驱动单元的i,肌肉力量可以被描述为在εi= Xmi /L0,Xm是压缩、气动肌肉,Fr是橡胶弹性力的补偿,P是气动肌肉的压力,a ,b是气动肌肉的结构有关的常数,k是一个滑动效果的因素,δF建模误差。
空气流经阀门的一个快速切换阀的质量流量占空比用u表示其中P U是上游的压力,下游的压力P D,Tu是上游的温度,一个是阀门R一个是有效瓣口面积为气体常数f(Pu/ Pd)的非线性流函数。
一般压力动态方程(Richer and Hurmuzlu, 2000):λa和λb代表的未知参数是气动肌肉的内容积和气动肌肉的热力学温度。
从公式1定义并行驱动力矩在任务空间机械臂为τ= Jp^t(θ)Fm和执行器动力学其中是Fmi的可计算部分,Dτ(t)表示在驱动单元空间(肌肉空间)所有未知干扰是一种非线性增益函数的矩阵推导式。
因此,集合的状态变量的定义描述为X =[x ^T1,X^T 2, XT^3 ]^ T = [θ^T, θ`^T,τ^ T] T ,整个系统可以表示在状态空间形式为而P = F P (X 1,X3)是τ的反函数。
3.自适应鲁棒控制器3.1 设计问题,假设和符号一般系统进行参数化,由于Cs,Ip的变化的不确定性,λa,λb和Dp, Dτ的未知非线性,其中,Dp和Dτ可由两部分组成,名义上的部分记为 D p`和Dτ`是恒定的或缓慢变化和被通过参数自适应和快速变化处理。
可以看出,系统的主要困难—,控制:系统具有严重的参数不确定性,变阻尼系数,多变指数λa和λb。
因此应采取的参数自适应方法,减少参数的不确定性。
(乙)系统很大程度上建模集中误差等未知干扰和摩擦力,这是包含在 D p和Dτ。
因此,该方法具有一定的鲁棒性,应用于处理不确定的非线性能提高有效性能。
(丙)模型的不确定性是不匹配的,即参数的不确定性和不确定性的非线性出现在动态方程,是不直接相关的控制输入,因此,应采用反推设计技术,克服设计困难,实现渐近稳定。
由于参数的不确定性和不确定性的非线性程度存在,参数的不确定性和不确定性的非线性应该满足β∈?β= {β:βmin≤β≤βmax},和D p≤Dpmax,Dτ≤Dτmax.让β表示β和β=?β-β估计误差,不连续的投影可以被定义为eq.7为了参数及其衍生物在自适应鲁棒控制的全过程中有界,在Γ> 0是一个对角矩阵和σ是适应功能是合成后用投适用定律是β= Proj?β(Γσ)影映射方程3.2弧控制器设计设计平行的递归反推设计程序在任务空间和肌肉通过电弧空间里雅普诺夫函数如下。
1)步骤一:定义一个转换函数数量为Z2=Z`1+ KcZ1,其中Z 1 = x 1-Y D的轨迹跟踪误差矢量和Kc是一个正对角矩阵。
如果Z2收敛到一个很小的值或0,那么Z1将收敛到一个很小的值或0,因为从Z1到Z2的传递函数是稳定的。
然后,对eq.9同时注意到eq.6,任务空间中的未知参数向量βP = [ Cs1,Cs2 Cs3, Dpn1, Dpn2, Dpn3 ]^T在任务空间中的参数不确定性被描述为在这?2 = [-diag(G^ T Gx2),-I]是一种参数自适应。
如果τ作为eq.10输入,一个虚拟控制法τd合成,Z 2尽可能小。
τd由两方面运用,通过在这τda的作用通过自适应控制法实现和σ 2 =?2I-T^p z2参数自适应实现的一种改进的模型补偿。
τday有控制规律,由两方面加强鲁棒控制。
τDS =τDS1 +τDS2,τDS1 =-I P K 2其中K 2是积极的增益控制功能的参数,和τDS2合成控制模型的不确定性来自参数不确定性和非线性不确定性,满足下列条件ε2是一个积极的设计参数,让输入的差异是Z 3 =τ-τD,替eq.12为eq.10˙V 2 = Z 2^T Z 2 / 2,它的时间导数是2)步骤二:虚拟控制输入Qm合成,使Z 3收敛到零或一个小值以保证其瞬态性能。
衍生的输入差异:导出x 1输出微分观测器的设计在下一部分。
˙τ直流源于τD,可以用于设计控制功能,但˙τ由于各种不确定因素无法计算, D 3 =?Dτ-˙τdu是肌肉中的总的不确定性。
肌肉空间未知参数向量是βτ= [λa1,λa2,λa3,λb1、λb2,λb3,dτn1,dτn2和d τn3],在肌肉空间中的参数不确定性的描述为一种参数自适应回归,给出了虚拟输入qmds用于自适应模型补偿和适应功能σ 3 =?3Z3。
鲁棒控制规律mds由以下两方面组成其中K 3是一个正反馈增益矩阵和qmds2是一个强大的控制选择功能,控制模型的不确定性满足下列所有条件ε3是一个积极的设计参数,考虑增强PSD函数V 3 =V 2 +z T3Z3 /2,它的时间导数是在一般情况下,跟踪误差是有界的。
此外,在参数不确定性的情况下渐近输出跟踪或零,最终跟踪误差将得到零。
3).步骤三:逆流图是用来计算快速切换阀的具体任务指令,提供所需的流量qmd。
每个阀门的控制输入,u = K^ (-1)q* qmd。
3.3输出微分观测器从上面看到的eq.20计算需要的姿态、速度和加速度,因此输出微分观测器(QI et al.,2003)提出了速度和加速度由于依赖于不准确的气动肌肉的收缩力和摩擦力的动态模型难而建立。
设为的估计值,I代表指数分别是极点配置方法是利用指定的值的a1,a2,a3,根据预期的性能指标。
输出微分观测器的误差可以被集中到不确定的非线性项Dp和Dτ,这可以通过鲁棒控制衰减。
3.4设计参数分析从以上程序,C 1,C 2、C 3、ε2、ε3和适应率Γ2,Γ3是设计参数,它对系统的瞬态性能和最终的跟踪误差有很大影响。
(a)Kc有助于Z 1大幅度收敛到零,这是由于未建模动态高频下总控制系统的带宽限制速度高,饱和的控制变量和限制采样频率等。
(b)ε2、ε3动态性幅度小,选择自解控制精度低, K 2 、K 3大幅度动态性,选择自解控制精度高。
{λv =2minσmin(K 2){σ(K 3)σ} denotes最小特征值A和矩阵Vεε=ε2 + 3。
(C)Γ2、Γ3的适应率Z2、Z3,Z2、Z3积分自下面的准稳态方程代入到eq.16和eq.18,前者分别推导。
是有界不确定性。
利用极点配置方法设计了2、3和的控制增益Γ2,Γ3。
它们被限制的带宽的系统为Kc。
4.实验结果控制概念的有效性验证几种被测物供应压力为0.48 MPa。
图2是建立实验(yao et al.,2005)ARC和DRC控制器的测试对比实验和性能指标(Yao,2004)。
图2控制器是缓慢平稳的阶跃响应如5S的图中所示的上升时间测试,以响应姿势θx = 0°,θy=0°,姿势θx = 6°,θy=4°(在本系统θZ是忽略它的值总是接近0。
)图3,ARC性能比DRC更好,ARC最终误差 E XF = 0.0195, E YF = 0.0232,最大绝对误差为 E XM = 0.2694和E YM = 0.4685。
测试控制性能鲁棒性的突发干扰中,位置传感器遭受突然的抖动,可被认为是一个突变的干扰系统。