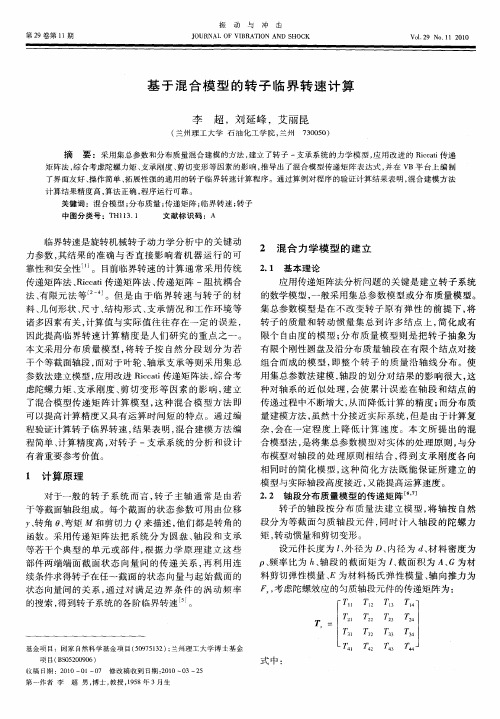
基于混合模型的转子临界转速计算
- 格式:pdf
- 大小:1.40 MB
- 文档页数:4

一、临界转速分析的目的临界转速分析的主要目的在于确定转子支撑系统的临界转速,并按照经验或有关的技术规定,将这些临界转速调整,使其适当的远离机械的工作转速,以得到可靠的设计。
例如设计地面旋转机械时,如果工作转速低于其一阶临界转速Nc1,应使N<0.75Nc1, 如果工作转速高于一阶临界转速,应使 1.4Nck<N<0.7Nck+1,而对于航空涡轮发动机,习惯做法是使其最大工作转速偏离转子一阶临界转速的10~20%。
二、选择临界转速计算方法要较为准确的确定出转子支撑系统的临界转速,必须注意以下两点1.所选择的计算方法的数学模型和边界条件要尽可能的符合系统的实际情况。
2.原始数据的(系统支撑的刚度系数和阻尼系数)准确度,也是影响计算结果准确度的重要因素。
3.适当的考虑计算速度,随着转子支撑系统的日益复杂,临界转速的计算工作量越来越大,因此选择计算方法的效率也是需要考虑的重要因素。
三、常用的计算方法2.Prohl-Myklestad莫克来斯塔德法传递矩阵法基本原理:传递矩阵法的基本原理是,去不同的转速值,从转子支撑系统的一端开始,循环进行各轴段截面状态参数的逐段推算,直到满足另一端的边界条件。
优点:对于多支撑多元盘的转子系统,通过其特征值问题或通过建立运动微分方程的方法求解系统的临界转速和不平衡响应,矩阵的维数随着系统的自由度的增加而增加,计算量往往较大:采用传递矩阵法的优点是矩阵的维数不随系统的自由度的增加而增大,且各阶临界转速计算方法相同,便于程序实现,所需存储单元少,这就使得传递矩阵法成为解决转子动力学问题的一个快速而有效的方法。
缺点:求解高速大型转子的动力学问题时,有可能出现数值不稳定现象。
今年来提出的Riccati 传递矩阵法,保留传递矩阵的所有优点,而且在数值上比较稳定,计算精度高,是一种比较理想的方法,但目前还没有普遍推广。
轴段划分:首先根据支撑系统中刚性支撑(轴承)的个数划分跨度。

一、临界转速分析的目的临界转速分析的主要目的在于确定转子支撑系统的临界转速,并按照经验或有关的技术规定,将这些临界转速调整,使其适当的远离机械的工作转速,以得到可靠的设计。
例如设计地面旋转机械时,如果工作转速低于其一阶临界转速Nc1,应使N<0.75Nc1, 如果工作转速高于一阶临界转速,应使 1.4Nck<N<0.7Nck+1,而对于航空涡轮发动机,习惯做法是使其最大工作转速偏离转子一阶临界转速的10~20%。
二、选择临界转速计算方法要较为准确的确定出转子支撑系统的临界转速,必须注意以下两点1.所选择的计算方法的数学模型和边界条件要尽可能的符合系统的实际情况。
2.原始数据的(系统支撑的刚度系数和阻尼系数)准确度,也是影响计算结果准确度的重要因素。
3.适当的考虑计算速度,随着转子支撑系统的日益复杂,临界转速的计算工作量越来越大,因此选择计算方法的效率也是需要考虑的重要因素。
三、常用的计算方法2.Prohl-Myklestad莫克来斯塔德法传递矩阵法基本原理:传递矩阵法的基本原理是,去不同的转速值,从转子支撑系统的一端开始,循环进行各轴段截面状态参数的逐段推算,直到满足另一端的边界条件。
优点:对于多支撑多元盘的转子系统,通过其特征值问题或通过建立运动微分方程的方法求解系统的临界转速和不平衡响应,矩阵的维数随着系统的自由度的增加而增加,计算量往往较大:采用传递矩阵法的优点是矩阵的维数不随系统的自由度的增加而增大,且各阶临界转速计算方法相同,便于程序实现,所需存储单元少,这就使得传递矩阵法成为解决转子动力学问题的一个快速而有效的方法。
缺点:求解高速大型转子的动力学问题时,有可能出现数值不稳定现象。
今年来提出的Riccati 传递矩阵法,保留传递矩阵的所有优点,而且在数值上比较稳定,计算精度高,是一种比较理想的方法,但目前还没有普遍推广。
轴段划分:首先根据支撑系统中刚性支撑(轴承)的个数划分跨度。

临界转速的计算WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8-一、临界转速分析的目的临界转速分析的主要目的在于确定转子支撑系统的临界转速,并按照经验或有关的技术规定,将这些临界转速调整,使其适当的远离机械的工作转速,以得到可靠的设计。
例如设计地面旋转机械时,如果工作转速低于其一阶临界转速Nc1,应使N<,如果工作转速高于一阶临界转速,应使<N<+1,而对于航空涡轮发动机,习惯做法是使其最大工作转速偏离转子一阶临界转速的10~20%。
二、选择临界转速计算方法要较为准确的确定出转子支撑系统的临界转速,必须注意以下两点1.所选择的计算方法的数学模型和边界条件要尽可能的符合系统的实际情况。
2.原始数据的(系统支撑的刚度系数和阻尼系数)准确度,也是影响计算结果准确度的重要因素。
3.适当的考虑计算速度,随着转子支撑系统的日益复杂,临界转速的计算工作量越来越大,因此选择计算方法的效率也是需要考虑的重要因素。
三、常用的计算方法应用不多数值积分法(前进法)以数值积分的方法求解支撑系统的运动微分方程,从初始条件开始,以步长很小的时间增量时域积分,逐步推算出轴系的运动唯一能模拟非线性系统的计算方法,在校核其他方法及研究非线性对临界转速的影响方面很有价值计算量较大,必须有足够的积分步数注:斯托多拉法莫克来斯塔德法传递矩阵法基本原理:传递矩阵法的基本原理是,去不同的转速值,从转子支撑系统的一端开始,循环进行各轴段截面状态参数的逐段推算,直到满足另一端的边界条件。
优点:对于多支撑多元盘的转子系统,通过其特征值问题或通过建立运动微分方程的方法求解系统的临界转速和不平衡响应,矩阵的维数随着系统的自由度的增加而增加,计算量往往较大:采用传递矩阵法的优点是矩阵的维数不随系统的自由度的增加而增大,且各阶临界转速计算方法相同,便于程序实现,所需存储单元少,这就使得传递矩阵法成为解决转子动力学问题的一个快速而有效的方法。

基于ANSYSWorkbench的飞轮转子临界转速计算分析任正义a,朱健国b,杨立平a(哈尔滨工程大学a.工程训练中心;b.机电工程学院,哈尔滨150001)摘要:以电磁轴承支撑的飞轮转子为研究对象,建立飞轮转子的有限元模型,基于ANSYS Workbench软件对转子系统临界转速进行求解。
分析了阻尼和支撑刚度对飞轮转子系统前三阶临界转速的影响。
结果表明,阻尼对飞轮转子临界转速没有影响,支撑刚度使临界转速增加,并计算出最佳的支撑刚度调整范围。
关键词:飞轮转子;ANSYS Workbench;临界转速;阻尼;支撑刚度中图分类号:TH133.7文献标志码:A文章编号:1002-2333(2019)09-0023-03 Calculation and Analysis on Critical Speed of Flywheel Rotor Based on ANSYS WorkbenchREN Zhengyi a,ZHU Jianguo b,YANG Liping a(a.Engineering Training Center;b.College of Mechanical and Electrical Engineering,Harbin Engineering University,Harbin150001,China) Abstract:Critical speed causes vibrations in the rotating system and affects system operation.The calculation and analysis of critical speed is an important issue.Taking the flywheel rotor supported by the electromagnetic bearing as the research object,the finite element model of the flywheel rotor is established,and the critical speed of the rotor system is solved based on ANSYS Workbench software.The influence of damping and supporting stiffness on the first three critical speeds of the flywheel rotor system is analyzed.The results show that the damping has no effect on the critical speed of the flywheel rotor,and the support stiffness increases the critical speed.The adjustment range of the optimum support stiffness is calculated.Keywords:flywheel rotor;ANSYS Workbench;critical speed;damping;support stiffness0引言能源问题如今已经成为全球瞩目的关键性问题,开发新能源成为各国研究的重点。
转轴的挠度及临界转速计算程序(一)具有集中载荷的两支点轴承的计算(如图2-118)转轴重量: Q=285(kg) L1=49转子重量: G1=365(kg) L2=52.1铁心有效长度:L fe=46(cm) L=126转子外径: D1=37.2(cm) La=36单边气隙: δ=0.4(cm) G2=20弹性模量: E= 2.06E+06(MPa)y=0.388888889气隙磁密: Bδ=5781GS z=0.285714286同步转速: n=5000r/min根据y、z值查图2-119功率: P=300kWφ=0.5过载系数: K= 2.25b处轴径212、挠度系数计算:单位:cm cm4cm cm3cm3轴a~b段d i J i X i Xi 3Xi3-X(i-1)319321.89906251533753375210490.62522.511390.6258015.625311718.324062526.518609.62572194121017.3633.537595.37518985.755131401.27406342.576765.62539170.256141884.78547.5107171.8830406.257000008000009000001000000∑ K ab=轴c~b段d i J i X i Xi 3Xi3-X(i-1)318200.96 4.591.12591.125 29321.89906259.5857.375766.25 311718.324062518.56331.6255474.25 4131401.27406327.520796.87514465.25 5141884.78532.534328.12513531.25 600000 700000 800000 900000 1000000∑ K cb=3、轴在b点的柔度:αbb= 3.44022E-06cm/kg一、绕度及临界转速计算4、磁拉力刚度:K0=8753.301622kg/cm5、初始单边磁拉力:P0=350.1320649kg6、由G1重量引起的b点绕度:f1=0.001875367cm7、滑环重量G2引起的b点绕度:f2=7.67363E-05cm8、单边磁拉力引起的b点绕度:fδ=0.001883694cm9、轴在b点的总绕度:f=0.003835798cm应小于异步电机同步电机10、转轴临界转速:n kp=6635.556016rpm二、轴的强度计算:1、最大转矩:Mmax=1289.25N.m2、bb点处的弯矩:Mbb=1419.958282N.m3、bb处的交变弯矩应力:σbb=1533266.691N/m24、bb处的剪切应力:τbb=696064.1399N/m2τn=348032.07N/m2脉动循环下的剪切应力:τ∞=870080.1749N/m25、轴在bb处受到的总负荷应力:σ= 2.319281093N/mm2应该小于材料许用[σ]=三、轴承计算:1、转子所受最大径向力:W=715.1320649kg2、a处轴承支承力:Pa=295.7014332kg3、c处轴承支承力:Pc=278.1069141kg4、轴承寿命:Lh=35986600.69小时 应大于10^5式中:ε=3.33f t=1载荷系数F f=1.1温度系数c=39600轴承额定动负荷P i=278.11当量动负荷(二)带外伸端的两支点轴承的计算(如图2-120)一、基本参数:电枢重量(G1包括转轴中部重量的2/3和滑环的重量在内)一、绕度及临界转速计算2、柔度系数计算:3、轴的柔度:α11=7.56093E-07cm/kgα22= 2.42497E-06cm/kgα12=-8.91046E-07cm/kgα21=-8.91046E-07cm/kg4、转子重量所引起的挠度:b处:f1'=0.006714438cmd处:f2'=-0.006606742cm5、磁拉力刚度:转子一:K1=136812.9233kg/cm转子二:K2=0kg/cm6、初始磁拉力:P1=1368.129233kgP2=0kg7、由磁拉力引起的挠度:F0= 1.03954E-12E0=0.896556679b处:f1"=0.001153785cmd处:f2"=-0.001359721cm8、总挠度:同步机b处:f1=0.007868222cm应该<0.008d处:f2=-0.007966462cm应该<09、临界转速:一次:n k=3506.387398rpm应该>975速计算程序(如图2-118)(cm)(cm)(cm)(cm)(kg)曲线cmcm-1[X i3-X(i-1)3]/J i10.4846530916.3375796210.0497816718.6617814727.9533112416.1324766599.61958374[X i3-X(i-1)3]/J i0.4534484472.3804045727.62086401610.32292717.17920081127.956844950.04cm0.032cm55N/mm2小时图2-120)(cm)(cm)(cm)(cm)Mpa[X i3-X(i-1)3]/J i X i2X i2-X(i-1)2[X i2-X(i-1)2]/J i X i-X i-1(X i-X i-1)/J i0.918664587-0.3518347250.3368560430.903685905[X i3-X(i-1)3]/J i X i2X i2-X(i-1)2[X i2-X(i-1)2]/J i X i-X i-1(X i-X i-1)/J i0.056840583204204.490.00397486614.30.00027796311.2813244395459340.80.1133507583.40.00101206-0.5198816461089-8456.29-0.004903061-64.7-3.75139E-0500-10890-330000000000000000000000000异步机cm应该<0.01cm cm应该<0cmrpm满足要求。
apdl临界转速
临界转速是指转子在某种工况下出现共振的转速。
当转子达到临界转速时,会出现大幅度的振动,导致转子失稳。
计算临界转速对于转子设计和运行具有重要意义。
以有限元分析软件为例,计算临界转速需要进行以下步骤:
1. 确定转子的有限元模型,包括材料属性、约束条件和载荷条件等。
2. 使用有限元分析软件对转子进行模态分析,得到转子的各个固有频率和振型。
3. 根据转子的工作条件,确定转子的旋转速度范围。
以两圆盘转子系统为例,在无阻力情况下,当各圆盘具有偏心的不平衡质量时,令$则转子的运动微分方程可写成$其中$为待定的复数列阵。
在使用软件进行分析时,可以先做模态分析,得到各阶振型、坎贝尔图及临界转速;再做谐响应分析,得到指定不平衡力引起的幅值和相位随频率变化曲线,同时可以在后处理中扩展commands查看结果;最后还可以把结果导入经典APDL中丰富后处理。
在实际应用中,临界转速的计算需要根据具体情况进行分析和调整。
同时,为了确保转子的稳定性,需要避免在临界转速附近运行。