自动控制复习题库分析
- 格式:doc
- 大小:848.50 KB
- 文档页数:16
课程名称: 自动控制理论 (A/B 卷 闭卷)一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
自动控制原理习题详解(上册)第一章 习题解答1-2日常生活中反馈无处不在。
人的眼、耳、鼻和各种感觉、触觉器官都是起反馈作用的器官。
试以驾车行驶和伸手取物过程为例,说明人的眼、脑在其中所起的反馈和控制作用。
答:在驾车行驶和伸手取物过程的过程中,人眼和人脑的作用分别如同控制系统中的测量反馈装置和控制器。
在车辆在行驶过程中,司机需要观察道路和行人情况的变化,经大脑处理后,不断对驾驶动作进行调整,才能安全地到达目的地。
同样,人在取物的过程中,需要根据观察到的人手和所取物体间相对位置的变化,调整手的动作姿势,最终拿到物体。
可以想象蒙上双眼取物的困难程度,即使物体的方位已知。
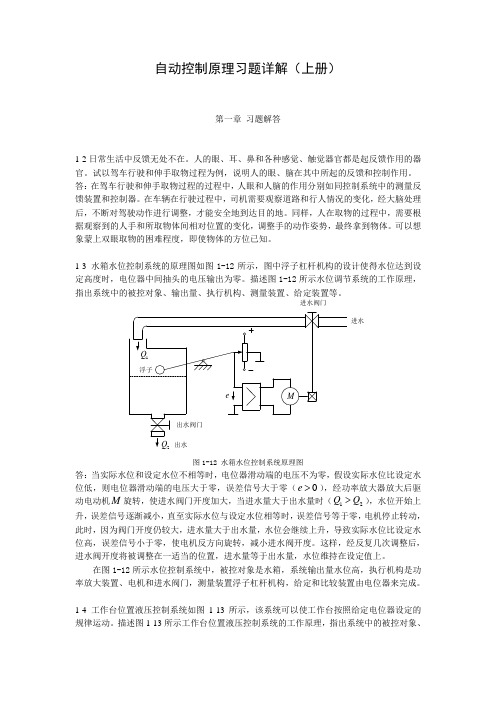
1-3 水箱水位控制系统的原理图如图1-12所示,图中浮子杠杆机构的设计使得水位达到设定高度时,电位器中间抽头的电压输出为零。
描述图1-12所示水位调节系统的工作原理,指出系统中的被控对象、输出量、执行机构、测量装置、给定装置等。
进水阀门进水图1-12 水箱水位控制系统原理图答:当实际水位和设定水位不相等时,电位器滑动端的电压不为零,假设实际水位比设定水位低,则电位器滑动端的电压大于零,误差信号大于零(0e >),经功率放大器放大后驱动电动机M 旋转,使进水阀门开度加大,当进水量大于出水量时(12Q Q >),水位开始上升,误差信号逐渐减小,直至实际水位与设定水位相等时,误差信号等于零,电机停止转动,此时,因为阀门开度仍较大,进水量大于出水量,水位会继续上升,导致实际水位比设定水位高,误差信号小于零,使电机反方向旋转,减小进水阀开度。
这样,经反复几次调整后,进水阀开度将被调整在一适当的位置,进水量等于出水量,水位维持在设定值上。
在图1-12所示水位控制系统中,被控对象是水箱,系统输出量水位高,执行机构是功率放大装置、电机和进水阀门,测量装置浮子杠杆机构,给定和比较装置由电位器来完成。
1-4 工作台位置液压控制系统如图1-13所示,该系统可以使工作台按照给定电位器设定的规律运动。

一、填空题(每空1分,共15分)1、反馈控制又称偏差控制,其控制作用是通过给定值与反馈量的差值进行的。
2、复合控制有两种基本形式:即按输入的前馈复合控制和按扰动的前馈复合控制。
3、两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为()G s,则G(s)为G1(s)+G2(s)(用G1(s)与G2(s)表示)。
4、典型二阶系统极点分布如图1所示,ω,则无阻尼自然频率=n7其相应的传递函数为,由于积分环节的引入,可以改善系统的稳态性能。
1、在水箱水温控制系统中,受控对象为水箱,被控量为水温。
2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为闭环控制系统;含有测速发电机的电动机速度控制系统,属于闭环控制系统。
3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统稳定。
判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用奈奎斯特判据。
4、传递函数是指在零初始条件下、线性定常控制系统的输出拉氏变换与输入拉氏变换之比。
5、设系统的开环传递函数为2(1)(1)K s s Ts τ++arctan 180arctan T τωω--。
6、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω对应时域性能指标调整时间s t ,它们反映了系统动态过程的。
1、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
是指闭环传系统的性能要求可以概括为三个方面,即:稳定性、准确性和快速性,其中最基本的要求是稳定性。
2、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数为()G s 。
3、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有微分方程、传递函数等。

自动控制原理及案例分析_四川大学中国大学mooc课后章节答案期末考试题库2023年1.关于系统频域校正,下列观点错误的是?答案:低频段,系统的开环增益主要为系统动态性能要求决定。
2.关于可控性判据说法正确的是?答案:若系统的状态方程为标准型,则不需要进行状态变换,可直接对系统进行可控性判别3.下列哪种特性不属于非线性系统?答案:欠阻尼特性4.下列哪种方法不适用于分析非线性系统?答案:频率分析法5.已知非线性系统的微分方程为x ̈+3x ̇+2x=0,则节点的性质为?答案:稳定节点6.两个元件空载时的传递函数之积就等于两个元件串联后的传递函数。
答案:错误7.关于系统传递函数,以下说法不正确的是答案:与相应s平面零极点分布图等价8.适合应用传递函数描述的系统是答案:单输入,单输出的线性定常系统9.传递函数完整地描述了线性定常系统的动态特性。
答案:正确10.线性定常系统的微分方程与传递函数之间可以相互确定。
答案:正确11.关于可观性判据说法正确的是?答案:约当标准型判据:当系统特征值有重根的时候,C阵中每个约当块的首列元素不全为0等价于系统可观12.关于可控性和可观性,下列说法错误的是?答案:若系统的大部分状态都是可控的,则系统具有可控性13.下列对串联滞后矫正系统描述正确的是?答案:校正后的系统截止频率ωc下降,高频段部分增益降低。
14.下列对三频段理论描述正确的是?答案:以上都正确。
15.典型欠阻尼二阶系统超调量大于5%,则其阻尼【图片】的范围为答案:16.二阶系统的闭环增益加大答案:对动态特性无影响17.系统在【图片】作用下的稳态误差【图片】,说明答案:型别v<218.系统中是否存在稳态误差取决于外作用的形式(阶跃,斜坡…),而与系统的结构参数无关。
答案:错误19.在系统闭回路中引入积分环节就能消除稳态误差。
答案:错误20.可以利用状态反馈任意配置全部闭环极点的充要条件是?答案:系统状态完全能控21.状态观测器的闭环极点可任意配置的充要条件是?答案:系统状态完全可观测22.关于离散系统下面说法不正确的是?答案:连续系统中存在数字信号23.下列哪项不影响开环离散系统的开环脉冲传递函数答案:是否有并联环节24.下列系统中属于开环控制的为()答案:普通车床25. 2.下列系统属于闭环控制系统的为答案:家用电冰箱26.下列不是对自动控制系统性能的基本要求的是答案:复现性27.下列不是自动控制系统基本方式的是答案:前馈控制28.下面关于状态反馈和输出反馈说法不正确的是?答案:状态反馈不会改变系统的可控性和可观测性29.下列关于脉冲传递函数描述错误的是?答案:与系统的差分方程无关30.A/D转换器的作用是?答案:D.将连续模拟信号转换为离散的数宇信号31.跟连续系统相比,下列哪个选项不属于离散控制系统的优点?答案:离散系统的性能更好32.离散控制系统稳定的充分必要条件是?答案:闭环特性方程的根都在Z平面上以原点为圆心的单位圆内33.下列关于非线性系统特征描述错误的是?答案:满足叠加原理34.下列对串联超前矫正系统描述正确的是?答案:校正后的系统截止频率ω_c上升,高频段部分增益增加。


铁路知识考试:车站信号自动控制题库考点(三)1、问答题PW-2000A移频轨道电路接收器的技术指标有哪些?正确答案:轨道电路调整状态下电压不小于350mV;主轨道继电器电压不小于20V(1700欧姆负载,无并机接入(江南博哥)状态下);小轨道接收电压不小于110mV;小轨道继电器或执行条件电压不小于20V(1700欧姆负载,无并机接入状态下)。
2、问答题发现色灯信号机灯泡有哪些情况下不能使用?正确答案:1、主、副灯丝同时点亮,或其中一根灯丝断丝。
2、灯泡漏气,冒白烟,内部变黑。
3、灯口歪斜,活动或焊口假焊。
3、单选JT-C系列机车信号的额定输入电压DC110V,机车电源在()范围内变化,系统应正常工作。
A、77~138VB、85~150VC、100~160VD、55~170V正确答案:A4、问答题电务人员在日常的设备检查中,都应当检查哪些内容?正确答案:(1)电务机有无故障记录信息;(2)电务机显示的当前双网络状态是否均良好;(3)UPS电池是否有足够的储电量;(4)当前主用机是否发生变化;(5)操作表示机有无故障报警信息及网络连接状态是否正常。
5、判断题ⅡAG区段必须设Q组合。
正确答案:错6、问答题SⅡ向北京方面发车时,写出出站信号机亮L灯和U灯的条件。
正确答案:亮L灯的条件是:LXJ吸起、ZXJ吸起、2LQJ吸起。
亮U灯的条件是:LXJ吸起、ZXJ吸起、2LQJ落下。
7、填空题道岔控制电路由()和()两部分电路组成。
分别完成()和()两项任务。
道岔控制电路中的继电器有()。
正确答案:道岔启动电路,道岔表示电路,转换道岔,表示道岔的位置,1DQJ、2DQJ、DBJ、FBJ。
8、问答题当1/3道岔在定位,办理X-5G接车的基本进路,信号开放后,3DG发生瞬间短路,使X进站信号机关闭,为什么?正确答案:因5号道岔与3号道岔之间有侵限绝缘,1/3号道岔在定位时,办理经5/7道岔反位的进路,在8线上要检查3DG的空闲,由于3DG瞬间短路,使X/XJJ落下,而关闭信号。
自动控制原理试题库(含答案)课程名称: 自动控制理论 (A/B 卷 闭卷)一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
一:填空题1、控制系统的基本要求是(稳定性)、(快速性)、(准确性)。
2、线性定常控制系统的传递函数是零初始条件下,(输出变量)与(输入变量)的拉氏变换之比。
3、一个稳定的线性系统的稳态误差取决于(系统型别)、(开环增益)与(输入信号的类型和幅值)。
4、常用的校正方式有(串联校正)、(反馈校正)、(前馈校正)(复合校正)。
5、反馈控制原理是(利用偏差消除偏差)。
6、线性系统的基本特性是可以应用叠加原理,即具有(齐次性)与(可叠加性)。
7、一个线性定常控制系统稳定的充分必要条件是(闭环极点均严格位于s 左半平面)。
8、线性系统的频率特性包括(幅频特性)与(相频特性)。
9、若负反馈前向通道的传递函数为G (s ),反馈通道的传递函数为H (s ),则开环传递函数为()()(s H s G ),闭环传递函数为()()(1)(s H s G s G +)。
10、在斜坡函数的输入作用下,(0)型系统的稳态误差为无穷大。
11、在斜坡函数的输入作用下,(Ⅱ)型系统的稳态误差为零。
12、一阶惯性环节的传递函数11+Ts ,它的幅频特性的数学式是(2211T ω+),它的相频特性的数学式是(T ωarctan -)。
13、已知系统的开环传递函数为)23(33)(2+++=s s s s s G ,称之为(Ⅰ)型系统,系统的开环极点为(-1),(-2),(0),零点为(-1)。
14、惯性环节的传递函数表达式为G (s )=(11+Ts )。
15、一阶微分环节的传递函数表达式为G (s )=(1+Ts )。
16、积分环节的传递函数表达式为G (s )=(s1)。
17、在斜坡函数的输入作用下,(0)型系统的稳态误差为无穷大。
18、函数t e t f 63)(-=的拉氏变换式是(63+s )。
19、一阶微分环节的传递函数为1s τ+,它的幅频特性的数学式是,它的相频特性的数学式是(arctan ωτ)。
20、控制系统常用的校正方式(串联校正)、(并联校正)、(前馈校正)、(复合校正)。
21、在经典控制理论中,常用的分析方法有(时域分析法)、(根轨迹分析法)、(频域分析法)。
22、单位负反馈系统的开环传递函数)3)(1(22)(++=s s s G ,求阻尼比=ζ(334),=n ω(3),系统的阶跃响应(无)(填“有”或“无”)超调。
23、若环节的传递函数为sK ,则其对数幅频特性)(ωL 在零分贝点处的频率数值为(K )。
24、在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为(反馈信号)。
25、自动控制系统对输入信号的响应,一般都包含两个分量,即一个是(零输入响应),另一个是(零状态响应)分量。
26、自动控制,是指在(没有人直接参与)的情况下,利用(外加的设备或装置), 使(机器、设备或生产过程的某个工作状态或参数)自动地按照预定的规律运行。
27、自动控制系统基本控制方式有:(反馈控制方式)、(开环控制方式)和(复合控制方式)。
28、建立控制系统数学模型的方法有:(分析法)和(实验法)。
29、在改善二阶系统性能的方法中,(比例—微分控制)和(测速反馈控制)是两种常用的方法。
30、线性系统的频率特性曲线有三种:(幅相频率特性曲线)、(对数频率特性曲线)和(对数幅相曲线)。
31、开环传递函数含有非最小相位环节的系统为(非最小相位系统);而开环传递函数全部由最小相位环节构成的系统称为(最小相位系统)。
32、频域的相对稳定性即稳定裕度包括(相角裕度)和(幅值裕度)两个方面。
33、反馈控制系统中的测量元件的职能是(检测被控制的物理量)。
34、复合控制是一种(按偏差控制)和(按扰动)相结合的控制方式。
35、按输入量变化规律来看,自动控制系统可分为(恒值控制系统)、(随动系统) 和(程序控制系统)。
36、控制系统的性能的评价分为(动态性能指标)和(稳态性能指标)。
37、在系统的动态性能指标中,评价系统响应速度的是(上升时间)和(峰值时间)。
38、所谓系统的稳定性,是指(系统在扰动消失后,由初始偏差状态恢复到原平衡状态的性能)。
39、幅值裕度的含义是(对于闭环稳定系统,如果系统开环幅频特性再增大h 倍, 则系统将处于临界稳定状态)。
40、自动控制系统的基本控制方式可分为(开环控制)、(反馈控制)、和(复合控制)。
41、设计自动控制系统的方法和过程涉及(系统建模)、(系统分析)、和(系统设计)。
42、假设某系统的单位脉冲响应函数为t e t g 5.235.0)(-=,则该系统的传递函数为(5.235.0+s )。
43、改善二阶系统性能的方法主要有(比例—微分控制)和(测速反馈控制)。
44、在欠阻尼(10<<ξ)二阶系统中,阻尼比越小,超调量越(大)(填“大”或“小”) ;上升时间越(短)(填“长”或“短”)。
45、已知某单位反馈系统的开环传递函数为)12)(11.0(50)(++=s s s G ,则其静态位置误差系数p K =(50)、静态速度误差系数v K =(0)、静态加速度误差系数a K =(0)。
46、设单位反馈系统的开环传递函数为)5(4)(+=s s s G ,试求该系统的单位阶跃响应为()(31)(34)(4t u e t u e t u t t ⋅+⋅---),单位脉冲响应为()(344t t e e ---)。
47、组成控制系统结构图的四种基本单元主要包括(信号线)、(引出点)、(比较点)和(方框)。
48、系统的动态性能主要包括(延迟时间)、(上升时间)、(峰值时间)、(调节时间)和(超调量)。
49、已知系统开环传递函数为ss G 10)(=,当频率为2rad/s 时,则传递函数的幅值为( 905-∠),相角为( 905.0-∠)。
50、按输入量的变化规律不同,线性连续控制系统可分为(恒值控制系统)、(随 动系统)和(程序控制系统)。
51、t e t f 2)(-=的拉氏变换式是(21+s )。
52、影响系统稳态误差的因素有:(系统型别)、(开环增益)和(输入信号的形式和幅值)。
53、惯性环节的传递函数11+Ts ,它的幅频特性的数学式是(2211Tω+),它的相频特性的数学式是(T ωarctan -)。
54、已知系统的开环传递函数为)65(13)(22+++=s s s s s G ,称之为(II )型系统,系统的开环极点为(0),(0),(-2),(-3),零点为(31-)。
55、传递函数互为倒数的典型环节,对数幅频曲线关于(0dB )线对称,对数相频曲线关于(00)线对称。
56、设单位反馈控制系统的开环传递函数为21)()(s as s H s G +=,要使相位裕度 为045,则a=(421=a )。
二:选择题1、在斜坡函数的输入作用下,(A )型系统的稳态误差为无穷大。
A 、 0B 、 ⅠC 、 ⅡD 、 Ⅲ2、对于Ⅱ型系统而言,在加速度2)(t t r =时,其静态加速度误差系数为k ,则其稳态误差为(C )。
A 、 0B 、 ∞C 、 k 2D 、 k1 3、惯性环节的传递函数表达式为G (s )=(B )。
A 、 1+TsB 、 11+Ts C 、 s 1 D 、 s 4、已知某线性系统开环传递函数为:)13)(1()()(++=s s s K s H s G ,则该系统不含有的典型环节为(D )。
A 、 惯性环节 B 、 积分环节 C 、 比例环节 D 、振荡环节5、惯性环节的传递函数11+Ts 的相频特性为(B )。
A 、 )arctan(T ω B 、 )arctan(T ω- C 、 )arctan(1T ω D 、)arctan(1T ω- 6、在阶跃函数的输入作用下,(A )型系统的稳态误差不为零。
A 、 0B 、 ⅠC 、 ⅡD 、 Ⅲ7、对于Ⅰ型系统而言,在斜坡输入t t r =)(时,其静态加速度误差系数为k ,则 其稳态误差为(D )。
A 、 0B 、 ∞C 、k 2 D 、 k1 8、积分环节的传递函数表达式为G (s )=(C )。
A 、 1+TsB 、 11+TsC 、 s 1D 、 s 9、已知某线性系统开环传递函数为:)12)(1()()(2+++=s s s K s H s G ,则该系统不含有的典型环节为(B )。
A 、 惯性环节 B 、 积分环节 C 、 比例环节 D 、振荡环节10、一阶微分环节的传递函数1+Ts 的相频特性为(A )。
A 、)arctan(T ωB 、)arctan(T ω-C 、)arctan(1T ωD 、)arctan(1T ω- 11、系统的输出信号对控制作用的影响(B )。
A 、 开环有B 、 闭环有C 、 都没有D 、 都有12、积分环节的传递函数表达式为G (s )=(C )。
A 、 1+TsB 、 11+Ts C 、 s 1 D 、 s 13、已知某线性系统开环传递函数为:)13)(1()()(+-+=s s s K s H s G ,则该系统不含有的典型环节为(C )。
A 、 惯性环节B 、 积分环节C 、 一阶微分环节D 、非最小相位环节14、若系统的截止频率和相角裕度均低于需求指标,应采用(A )。
A 、串联超前校正B 、串联滞后校正C 、串联滞后—超前校正D 、反馈校正15、以同等精度元件组成的开环系统和闭环系统,其精度(B )。
A 、 开环高B 、 闭环高C 、 相差不多D 、 一样高16、在加速度函数的输入作用下,(D )型系统的稳态误差为零。
A 、 0B 、 IC 、D 、III 型及以上17、已知系统开环传递函数为)15.0)(11.0()(++=s s s K s G ,则其静态位置误差系数p K 、静态速度误差系数v K 、静态加速度误差系数a K 分别为(A )。
A 、 ∞,K ,0 B 、0,∞,K C 、K ,0,∞ D 、∞,0,K18、已知系统的零点数为m ,极点数为n ,且n m <,则系统根轨迹分支数为(B )。
A 、mB 、 nC 、 n m +D 、n m -19、惯性环节的传递函数11+Ts ,它的相频特性为(C )。
A 、)arctan(T ω B 、)arctan(1T ω C 、)arctan(T ω- D 、)arctan(1T ω- 20、对于系统抗干扰能力(B )。
A 、 开环强B 、 闭环强C 、 都强D 、都不强21、对于0型系统而言,(A )输入作用下,系统稳态误差为常数值。
A 、 阶跃输入B 、 斜坡输入C 、 加速度输入D 、 正弦输入22、非最小相位惯性环节的传递函数表达式为G (s )=(C )。
(T>0)A 、 1+TsB 、 11+Ts C 、11+-Ts D 、1+-Ts 23、积分环节s1的幅频特性为(D )。