数控机床编码器讲解.ppt
- 格式:ppt
- 大小:548.51 KB
- 文档页数:1


编码器培训教程引言:编码器是现代电子设备中不可或缺的组件之一,它将原始信号转换为数字信号,以便于传输和处理。
为了更好地理解和应用编码器,本教程将详细介绍编码器的基本原理、分类、工作方式以及应用场景。
第一部分:编码器的基本原理编码器是一种将原始信号转换为数字信号的装置。
它通过对信号进行采样、量化和编码,将模拟信号转换为数字信号。
编码器的基本原理可以概括为三个步骤:采样、量化和编码。
1.采样:采样是将连续的信号转换为离散的信号。
采样过程中,编码器按照一定的采样频率对信号进行采样,将连续的信号转换为一系列离散的点。
2.量化:量化是将连续的信号值转换为离散的信号值。
量化过程中,编码器将采样得到的信号值按照一定的量化级别进行量化,将连续的信号值转换为离散的信号值。
3.编码:编码是将量化后的信号值转换为数字信号。
编码过程中,编码器将量化后的信号值按照一定的编码规则进行编码,将离散的信号值转换为数字信号。
第二部分:编码器的分类根据编码器的编码方式,编码器可以分为两种类型:增量式编码器和绝对式编码器。
1.增量式编码器:增量式编码器输出的是脉冲信号,它通过计算脉冲的数量和方向来确定位置信息。
增量式编码器具有结构简单、成本低廉的优点,但它的缺点是存在累积误差,且在断电后无法确定位置信息。
2.绝对式编码器:绝对式编码器输出的是数字信号,它通过编码器内部的码盘来确定位置信息。
绝对式编码器具有高精度、无累积误差的优点,但它的缺点是成本较高,且在高速运动时输出信号可能会出现延迟。
第三部分:编码器的工作方式编码器的工作方式可以分为两种:接触式和非接触式。
1.接触式编码器:接触式编码器通过机械接触来实现信号的传递。
接触式编码器具有结构简单、可靠性高的优点,但它的缺点是存在磨损和寿命问题。
2.非接触式编码器:非接触式编码器通过电磁感应、光电效应等方式来实现信号的传递。
非接触式编码器具有无磨损、寿命长的优点,但它的缺点是成本较高,且对环境要求较高。
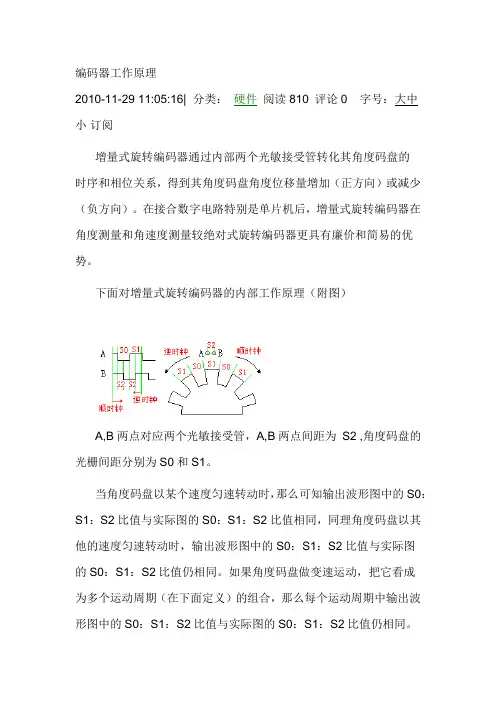
编码器工作原理2010-11-29 11:05:16| 分类:硬件阅读810 评论0 字号:大中小订阅增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。
在接合数字电路特别是单片机后,增量式旋转编码器在角度测量和角速度测量较绝对式旋转编码器更具有廉价和简易的优势。
下面对增量式旋转编码器的内部工作原理(附图)A,B两点对应两个光敏接受管,A,B两点间距为S2 ,角度码盘的光栅间距分别为S0和S1。
当角度码盘以某个速度匀速转动时,那么可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理角度码盘以其他的速度匀速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
如果角度码盘做变速运动,把它看成为多个运动周期(在下面定义)的组合,那么每个运动周期中输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
通过输出波形图可知每个运动周期的时序为我们把当前的A,B输出值保存起来,与下一个A,B输出值做比较,就可以轻易的得出角度码盘的运动方向,如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,除以所消耗的时间,就得到此次角度码盘运动位移角速度。
S0等于S1时,且S2等于S0的1/2时,1/4个运动周期就可以得到运动方向位和位移角度,如果S0不等于S1,S2不等于S0的1/2,那么要1个运动周期才可以得到运动方向位和位移角度了。
我们常用的鼠标也是这个原理哦。
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B 和Z相;A、B两组脉冲相位差90?,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。

编码器码盘工作原理
编码器码盘是一种常用于测量旋转角度的装置,它通过测量旋转轴的
转动角度来输出相应的数字信号。
那么,编码器码盘是如何工作的呢?下面我们来详细介绍一下。
1. 码盘的结构
编码器码盘通常由一个固定的外壳和一个可旋转的内部盘组成。
内部
盘上有许多等距的凸起和凹槽,这些凸起和凹槽可以被称作码位。
码
位的数量决定了编码器码盘的分辨率,即它能够测量的最小旋转角度。
2. 光电传感器的作用
在编码器码盘的外壳上,有一个或多个光电传感器。
光电传感器可以
检测内部盘上的码位,从而确定内部盘的旋转角度。
当内部盘旋转时,码位会通过光电传感器上的光源和检测器,使检测器能够测量到光的
变化,从而输出相应的数字信号。
3. 编码方式
编码器码盘的编码方式有两种:绝对编码和增量编码。
绝对编码器码
盘可以直接输出旋转角度的具体数值,而增量编码器码盘则只能输出
旋转角度的变化量。
绝对编码器码盘的分辨率较高,但价格也较贵;
增量编码器码盘的分辨率较低,但价格相对较低。
4. 应用领域
编码器码盘广泛应用于各种机械设备中,如工业机器人、数控机床、
印刷机械、电子设备等。
它可以精确测量旋转角度,使得机器能够更
加准确地定位和控制。
以上就是编码器码盘的工作原理及应用领域的相关介绍。
通过了解编码器码盘的结构和编码方式,我们可以更好地理解它的工作原理,从而更好地应用它来实现机器的精确控制。