工业工程之双手法
- 格式:ppt
- 大小:1.85 MB
- 文档页数:2
基础工业工程实验报告_双手操作与mod法一、实验目的和要求1、掌握工艺程序图的绘制方法2、掌握工艺程序图分析方法3、试用“5WIH”提高技术发掘问题,并用“ECRS”原则来改进装配流程。
二、实验内容1、熟悉CJ-IO 型交流接触器的构成及各组成零件的名称。
2、了解CJ-IO 型交流接触器的结构原理: CJ-IO 型交流接触器的结构与一般电磁式电器相同,也由电磁机构、触点系统、尖弧系统、复位弹簧机构或缓冲装置、支架与底座等几部分构成。
接触器的工作原理是:当吸引线圈通电后,线圈中的电流在铁心中产生磁通对街铁产生克服复位弹簧反力的电磁吸力,铁带动触点动作。
当线圈中的电使街压值降低到某一数值时,铁心中的磁通下降,电磁吸力减小,当减小到不足以克服复位弹簧的反力时,街铁在复位弹簧的反力作用下复位。
-IO 型交流接触器的装配工艺程序。
3、3、设计CJ4、绘制出所设计的CJ-IO 型交流接触器的工艺程序图。
5、按所操作设计的工艺程序图对CJ-IO 型交流接触器进行实际组装。
6、在实施了实际组装操作的基础上,对所设计的工艺程序图进行分析。
三、实验报告(1) 双手操作图(2) 动素分析表(双手动素图)安装橡皮脚左手动素右手分析要点伸手至橡皮脚 1 伸手至小螺钉拿起橡皮脚 2 拿起小螺钉3 移动底座工作位置移动底座工作位置, 4 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 5 将组装好的橡皮脚插入孔中伸手至小螺帽 6 伸手至改刀拿起小螺帽 7 拿起改刀8 移至底座工作位移至底座工作位置置9 旋转小螺帽用改刀抵住螺钉等待 10 放下改刀伸手至橡皮脚 11 伸手至小螺钉拿起橡皮脚 12 拿起小螺钉13 移动底座工作位置移动底座工作位置, 14 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 15 将组装好的橡皮脚插入孔中伸手至小螺帽 16 伸手至改刀拿起小螺帽 17 拿起改刀18 移至底座工作位移至底座工作位置置19 旋转小螺帽用改刀抵住螺钉等待 20 放下刀21 将底座水平旋转将底座水平旋转180 180 伸手至橡皮脚 22 伸手至小螺钉拿起橡皮脚 23 拿起小螺钉24 移动底座工作位置移动底座工作位置, 25 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 26 将组装好的橡皮脚插入孔中伸手至小螺帽 27 伸手至改刀拿起小螺帽 28 拿起改刀29 移至底座工作位移至底座工作位置置30 旋转小螺帽用改刀抵住螺钉等待 31 放下改刀伸手至橡皮脚 32 伸手至小螺钉拿起橡皮脚 33 拿起小螺钉34 移动底座工作位置移动底座工作位置, 35 , 将橡皮脚套入小将橡皮脚套入小螺钉螺钉待持住 36 将组装好的橡皮脚插入孔中伸手至小螺帽 37 伸手至改刀拿起小螺帽 38 拿起改刀39 移至底座工作位移至底座工作位置置40 旋转小螺帽用改刀抵住螺钉等待 41 放下改刀安装按钮开关左手动素右手分析要点至按钮帽 1 至按钮柱拿起 2 拿起至工作位置 3 至工作位置对准按钮柱 4 , 将按钮柱插入底座孔内旋转按钮帽 5 紧握按钮柱伸手至按钮片 6 紧握按钮柱拿按钮片 7 紧握按钮柱移动到工作位置 8 紧握按钮柱9 紧握按钮柱将红色按钮片按入按钮中至按钮帽 10 至按钮柱拿起 11 拿起至工作位置 12 至工作位置对准按钮柱 13 , 将按钮柱插入底座孔内旋转按钮帽 14 紧握按钮柱安装交流接触器左手动素右手分析要点伸手至交流器 1 伸手至螺钉拿交流接触器 2 拿起螺钉移动至底板上 3 移动至接触器将孔与孔对准 4 与孔对准持住 5 , 插入孔中伸手至螺帽 6 持住拿起螺帽 7 持住移动至工作位置 8 持住旋转螺帽 9 持住伸手至螺帽 10 伸手至螺钉拿起螺帽 11 拿起螺钉移动至工作位置 12 移动至工作位置对准螺钉 13 , 插入孔内旋转螺帽 14 持住水平旋转180 15 水平旋转180 伸手至螺帽 16 伸手至螺钉拿起螺帽 17 拿起螺钉移动至工作位置 18 移动至工作位置对准螺钉 19 , 插入孔内旋转螺帽 20 持住伸手至螺帽 21 伸手至螺钉拿起螺帽 22 拿起螺钉移动至工作位置 23 移动至工作位置对准螺钉 24 , 插入孔内旋转螺帽 25 持住安装接线端子左手动素右手分析要点1 将底座翻转90 将底座翻转90伸手至一接线端子1# 2 伸手至改刀拿起接线端子 3 拿起改刀移动至开关螺钉处 4 移动至螺钉卡入按钮螺钉 5 持住持住接线端子 6 旋转改刀持住 7 将改刀放下8 将底座翻转90 将底座翻转90 移动到接线端子另一 9 伸手至改刀头拿起接线端子 10 拿起改刀移动至开关螺钉处移动至螺钉11卡入按钮螺钉 12 持住持住接线端子 13 旋转改刀持住 14 将改刀放下15 将底座翻转90 将底座翻转90 伸手至一接线端子2# 16 伸手至改刀拿起接线端子 17 拿起改刀移动至开关螺钉处 18 移动至螺钉卡入按钮螺钉 19 持住持住接线端子 20 旋转改刀持住 21 将改刀放下22 将底座翻转90 将底座翻转90 移动到接线端子另一 23 伸手至改刀头拿起接线端子 24 拿起改刀移动至开关螺钉处 25 移动至螺钉卡入按钮螺钉 26 持住持住接线端子 27 旋转改刀持住 28 将改刀放下(3) MOD表达式及时间计算伸手握取M3G3 M3G3 6 M3G1 伸手拿取改小螺帽刀移至底座M3P0 M3P0 3M3PO 移至底座工工作位置作位置旋转小螺(M1G0M1PM1G0M1P20 M3G1 用改刀抵住帽 0)x10 0 螺钉伸手握取M3G0 M3G3 6 M3G3 伸手握取小橡皮脚螺钉移至底座M3P0 M3P0 3 M3PO 移至底座工工作位置作位置将橡皮脚M2P2 M2P2 4 M2P2 将小螺钉套套入小螺入橡皮脚钉持住 H M2P5 7 M2P5 将组装好的橡皮脚插入孔中伸手握取M3G3 M3G3 6 M3G1 伸手拿取改小螺帽刀移至底座M3P0 M3P0 3 M3PO 移至底座工工作位置作位置旋转小螺(M1G0M1PM1G0M1P20 M3G1 用改刀抵住帽 0)X10 0 螺钉将底座翻(M3G0M3CM3G0M3C8 (M3G0M3C将底座水平转旋转180 2) 2 2) 旋转180 伸手握取M3G1 M3G1 4 M3G1 伸手握取按按钮帽钮柱移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置持住 H M3P2 5 M3P2 将按钮柱插入底座孔内旋转按钮(M2GOM2M2GOM2P32 H 持住帽 P0)X8 0移动握取M3G1 M3G1 4 H 持住按钮按片移至工作M3P0 M3P0 3 H 持住位置将红色按M2P2 M2P2 4 H 持住钮片按入按钮中伸手握取M3G1 M3G1 4 M3G1 伸手握取按按钮帽钮柱移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置持住 H M3P2 5 M3P2 将按钮柱插入底座孔内旋转按钮(M2GOM2M2GOM2P32 H 持住帽 P0)X8 0伸手握取M3G1 M3G3 6 M3G3 伸手握取大交流接受螺钉器移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置将交流接M2P5M2P5 7 H 持住受器对准底座孔持住 H M2P2 4 M2P2 将大螺钉插入孔中伸手握取M3G3 M3G3 6 H 持住大螺帽移至底座M3P0 M3P0 3 H 持住工作位置将大螺帽M3P5 M3P5 8 H 持住对准插入大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0伸手握取M3G3 M3G3M2G11 M3G3 伸手握取大大螺帽 3 螺钉移至底座M3P0M3P0 3 M3P0 移至底座工工作位置作位置将大螺帽M2P5 M2P5M2P5 14 M2P5 将大螺钉插对准插入入孔中大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0水平旋转(M2G0M2CM2G0M2C6 水平旋转(M2G0M2C180 2) 2 180 2) 伸手握取M3G3 M3G3M2G11 M3G3 伸手握取大大螺帽 3 螺钉移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置将大螺帽M2P5 M2P5M2P5 14 M2P5 将大螺钉插对准插入入孔中大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0伸手握取M3G3 M3G3M2G11 M3G3 伸手握取大大螺帽 3 螺钉移至底座M3P0 M3P0 3 M3P0 移至底座工工作位置作位置将大螺帽M2P5 M2P5M2P5 14 M2P5 将大螺钉插对准插入入孔中大螺钉旋转按钮(M1GOM1M1GOM1P20 H 持住帽 P0)X10 0将底座翻(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀一头移动至开M3P0 M3P0 3 M3P0 移动至开关关螺钉处螺钉处将接线端子持住M2P2 M2P2 4 H卡入按钮螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0将底座翻转(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀移动至交M3P0 M3P0 3 M3P0 移动至交流流接收器接收器将接线端子持住 M2P2 M2P2 4 H卡入交流接收器的上螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0将底座翻(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀移动至开M3P0 M3P0 3 M3P0 移动至开关关螺钉处螺钉处将接线端子持住 M2P2 M2P2 4 H卡入按钮螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0将底座翻转(M3G0M3CM3G0M3C7 (M3G0M3C将底座翻转90 1) 1 1) 90 伸手握取M3G3 M3G3 6 M3G1 伸手握取改接线端子刀移动至交M3P0 M3P0 3 M3P0 移动至交流流接收器接收器将接线端子持住 M2P2 M2P2 4 H卡入交流接收器的上螺钉持住旋转改刀 H M2G0M2P0 40 (M2G0M2P0)X10持住将改刀放下 H M2P0 2 M2P0总计MOD值=767=767x0.129=98.943s=1min39s 秒表计时为149.47s=2min30s MOD值小于秒表计时因为MOD法计算只要基于一下假设:1,所有人力操作时的动作均为基本动作。
经研究的结果如下,发现最适当的重量是每次铲起21磅,每天工作量最高可达35吨。
每铲铲起的重量38磅33磅21磅15磅每天工作量25吨30吨35吨28吨原则6:连续曲线运动比方向突变的直线运动更好拿一只铅笔在纸上,一上一下划下来。
详细分析这个动作内容可以发现,这个动作由2个阶段构成,即"移动,停止再改变方向'。
在此例中,科学家研究的结果显示约75至80%的时间来移动铅笔,15~25%的时间是用来改变手的方向。
换句话说此15~25%改变方向的时间是没有生产性的,进一步的研究再显示出连续性的曲线运动其工作效率比方向突变的直线运动来得较佳。
方向突变不但浪费时间而且也容易引起疲劳。
原则7:弹道式运动较轻快人体固定肌肉的动作部份可以划分成二组。
一组为控制向内收缩的肌肉,另一组为控制向外抛出的控制肌肉。
当二者平衡时,手则静止不动;当二者不平衡时,则产生动作出来。
例如:以食指及大姆指拿笔来写字的动作,就是上式固定式两组不同配合运用肌肉支动的最佳例子。
而弹道式运动是一个较快而且容易的运作方式,因为只运用了其中一组的肌肉动作方向。
弹道式运动只有在初期,要开始动作之时,可以加以控制。
一旦运动出去之后就无法予改变方向。
例如:挥动高尔夫球杆时,一旦击出之后,杆子必会顺势挥出,无法予以在中途(例如在肩部之高度)停顿下来。
弹道式运动只有在下列情形下才会停止下来。
反方向的肌肉制止力量。
碰到阻碍物。
运动的动量消失了,如高尔夫球杆挥至超越头项时,动量已消失了,自然就停顿下来了。
弹道式运动方式,效率较高,速度较快,较有力量较精确,而且不容易引起肌肉疼痛。
比固定式的运动方式较舒畅,木匠打钉子之动作就是一个很好的运用弹道式之动作方式。
此外,例如英文打字、弹钢琴、拉小提琴及运动选手之动作都是很好的例子。
原则8:降低动作注意力过程中产生迷惑或需要判断时,动作会有停顿、迟凝。
所以,要通过各种方法减少需要判断、迟疑的动作。
降低动作注意力例子:放置螺丝刀的固定位以喇叭形为佳;需要对准及嵌入时,以导向槽及机构装置减少对准的难度;测量时用固定规格及定位等手段,使测量工作减少脑力判断过程;利用声光等进行识别,减少注意力。
IE工业工程——七手法与四原则
'工业工程'英文为Industrial Engineering简称IE。
“IE”是应用科学及社会学的知识,以合理化、舒适化的途径来改善我们工作的品质及效率,以达到提高生产力,增进公司之利润,进而使公司能长期的生存发展,个人的前途也有寄托之所在。
因此,简单地说“IE”就是代表“合理化及改善”的意义,为了顾及记忆的方便,我们就以中文“改善”来代表“IE”的含义。
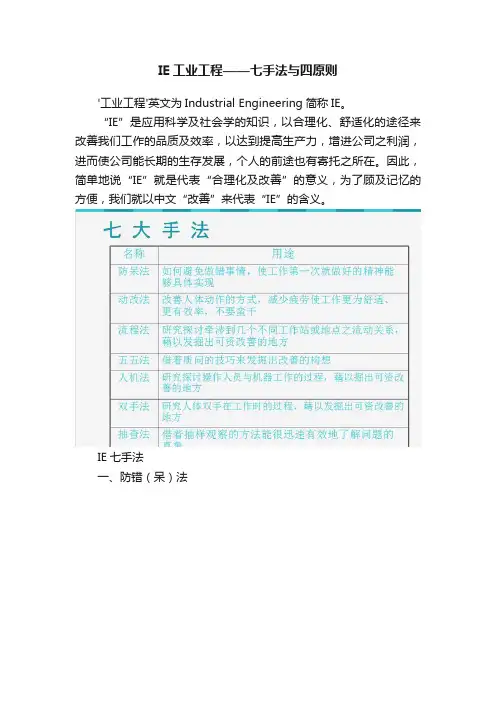
IE七手法
一、防错(呆)法
防错(呆)法简介
防错(呆)法原则、原理二、改动法
动改法简介
动改法原则三、流程法
流程法四、五五法
五五法五、人机法
人机法六、双手法
双手法七、抽查法
抽查法
篇幅有限,七大手法仅做了解,深入内容及具体应用,共勉学习。
除了七大手法,还有IE四个原则就不得不提一下:
改善四原则
欲改变数字,就必须改变行动;欲改变行动,就必须改变目标;
欲改变目标,就必须改变想法;欲改变想法,就必须改变习惯;
欲改变习惯,就必须改变过去;欲改变过去,就必须改变知识;
欲改变知识,就必须改变欲望;欲改变欲望,就必须改善数字。
实验三双手操作分析一、实验任务绘制195A型喷油泵装配过程的双手操作分析图,并加以研究改进。
二、实验目的及训练要点1)掌握双手操作分析图的绘制方法;2)学会正确描述、设计和改进工作地布置;3)熟悉产品装配工序卡;4)学会正确分析双手操作图所记录的工作现状,并能找出存在的问题,提出改进方案。
三、实验原理1. 双手操作分析的内容及意义双手操作分析是对由一名操作者所承担的作业内容进行记录和分析的技术。
通过双手操作分析可以考察操作者的操作方法和步骤是否合理,左右手的分工是否恰当,是否存在多余和笨拙的动作而需要改进,工作地物料的摆放、工作地布置是否合理等等。
经研究和改进,以达到减轻劳动强度、提高作业效率的目的。
双手操作分析的作用可以归纳为以下几点:1)研究双手的动作及其平衡问题。
2)发掘“独臂”式操作并改进。
3)发现伸手、找寻以及笨拙而无效的动作。
4)发现工具、物料、设备等不合适的放置位置。
5)使动作规范化。
2. 双手操作分析图的画法绘制双手操作分析图应注意以下几点:1)必须深入生产现场,观察全部操作,了解情况,确定操作周程及其起点和终点。
2)画图前,首先填写有关资料,比如工作名称、操作人员、研究人员等。
3)画出工作场所的平面布置图。
4)正式画图时,要边观察、边记录,一次观察一只手的动作。
通常先记录右手,将其动作用适当的符号和文字说明记录在右边,并反复补充、核对、改正,不要遗漏。
再以同样的程序记录左手的动作。
左右手的同时动作应画在同一水平位置,并多次核对两只手的动作,使记录准确无误。
5)最后将左右手的动作分别进行统计,并记录在操作图的下方或者右下方。
四、实验仪器、仪器、工具及资料1)计算机、投影仪,或电视机、VCD影碟机。
2)195A型喷油泵泵体。
3)螺钉旋具、尖嘴钳、料盒。
4)录像资料。
五、实验内容及步骤本实验通过录像资料观察装配195A型喷油泵从拿泵体至装好推杆体的工作过程,然后将工作地布置简图及双手操作过程记录下来,根据动作经济原则,并采用“5W1H”提问技术和“ECRS”分析原则进行改进。
运用双手操作分析方法改善工人安装螺栓过程112010898 陈柯颖1. 双手操作分析1.1 定义生产现场的具体主要是靠工作人员的双手来完成。
记录、分析如何用双手进行实际操作,以提高作业效率,则称为双手操作分析。
1.2 分析方法与工具双手操作分析中常采用“双手操作分析图”。
双手操作图又称操作人程序图、左右手程序图,是一种特殊的程序图。
其分别将工人在操作过程中左右手的所有动作和空闲都进行记录,其目的在于对各项操作做更加详细的记录,以便分析并改进各项操作的动作。
2. 对尼玛克工厂工人安装螺栓过程进行双手操作分析。
2.1 分析过程(1)选择从尼玛克工厂录制的一段工人安装螺栓的视频进行分析。
(2)观察工作情况,熟悉工作过程。
(3)绘制工作地布置简图,标明各种零件、工具、设备的相互位置。
(4)绘制双手操作分析图。
(5)观看操作人员左右手的各项动作,将双手的动作情填入分析图中。
(6)研究视频及分析图,运用5W1H等方法找出冗余、笨拙的动作,不合理的操作安排,左、右手分工不恰当处,物料、工具摆放位置的不合理之处等。
(7)按ECRS四大原则进行考查,分析,并提出改进意见。
(8)绘制改进后的工作场地布置图和双手操作图。
2.2 绘制双手操作分析图对比程序的5种符号–O ——表示操作,即握取、放置、使用、放手的动作;–——表示搬运、手移动的动作;–——表示检查。
–D——表示等待,即手的延迟、停顿;–——表示持住,即手握住物件的动作;改善前双手操作分析图:操作移动检验等待握持握持等待检验移动操作○→□D ▽▽D □→○15●●5121●●12316●●16343●●3451●●15631●●31673●●3781●●1891●●191013●●1310111●●111121●●1121312●●1213142●●214158●●815162●●2161710●●1017182●●2181912●●1219201●●120等待等待等待拿起一个螺栓将螺栓拧入上盖拿起一个螺栓等待等待等待拿起一个螺栓将螺栓拧入上盖拿起一个螺栓将螺栓拧入上盖等待放入左手将垫片依次套入螺栓将多余的垫片放入零件盒拿起一个螺栓递给左手等待递给左手等待等待等待等待将螺栓拧入上盖等待等待将螺栓拧入上盖拿起一个螺栓等待等待持住螺栓等待等待持住垫片将螺栓依次立起来放在圆盘右侧摆好伸手抓取垫片伸手抓取8个螺栓放入左手双手操作分析工站名称 : 尼玛克工厂 工站图示:改善现场:______BU_______课______线 作 业 员:____________________研 究 者: ___陈柯颖_ 研究日期: _2014.6.20__________________作业方式:结束状态:螺栓装好时间单位:开始状态:双手空闲,放在工作台上作业单元说明单元顺序作业单元说明左手右手时间时间单元顺序改善前改善後站立坐姿mins2.3 根据双手操作改善原则,发现安装螺栓过程中存在下列问题:(1)零件区离工人较远,而且呈“一”字形横向排列,每次工人抓取零件都需要站起来;(2)工人抓取垫片不能一次抓到正好,多余的还需要放回去;(3)将垫片套入螺栓时左手一直是“持住”状态,而“持住”是非常疲劳的动作,同时也不能够左右手同时进行工作。



工业工程七大手法前言:质量代表了一个国家的科学技术、生产水平、管理水平和文化水平.产品质量的提高,意味着经济效益的提高.当今世界经济的发展正经历着由数量型增长向质量型增长的转变,市场竟争也由人格竟争为主转向质量竟争为主。
而所有企业的目的均系希望以最小的投入(INPUT)得到最大的产出(OUTPUT),以致独得最大的效益.那么如何在质量保证的基础上,使企业独得最大的效益呢?只有降低成本和提高企业的生产力,把这些“投入”做最有效的组合,以达到质量稳定、效率高、交期准、浪费少、成本低。
这就是近代工业界工业工程(IE)所要做的主要工作。
IE简介1.甚么是IE?IE就是指INDUSTRIAL(工业) ENGINEERING(工程)。
它由两字词之首字母组合而成。
2。
IE的起源?IE的基础也是最早的起源来自于『工作研究』,而『工作研究』的主要构成是来自泰勒(Frederick W.Taylor 1856~1915)的『工作研究』与吉尔布雷斯(Frank B Gilbreth 1868~1924)的『动作研究』二者所构成。
3。
IE的目的?应用科学及社会学的知识,以合理化、舒适化的途径来改善我们工作的质量及效率以达到提高生产力增进公司之利润进而使公司能长期的生存发展下去,个人的前途也有寄托之所在.因此,简单地说,IE的目的就是充分利用工厂的人力、设备、材料,以最经济有效的工作方法,使企业独得最大的效益。
4.为甚么要有IE?*持续的进步是企业及个人长久生存的根基。
*改善就是进步的原动力,没有改善就没有进步。
-学如逆水行舟,不进则退。
*改善是永无止境的,必须长久持续去进行.4。
IE的主要范围?*工程分析*价值分析(V。
A) *动作研究*工作标准*时间研究*时间标准*工厂布置*运搬设计5。
为甚么要有改善(IE)七大手法?*以不教而战,谓之杀.*徒然要求改善而不讲求方法、技巧,于事无补。
*给人一条鱼吃,不如教他捕鱼的技术.*要求捕更多的鱼,首先必须讲求捕鱼技术的传授与使用。