基于simulink的发电机励磁系统整流单元的建模与仿真
- 格式:docx
- 大小:36.46 KB
- 文档页数:3
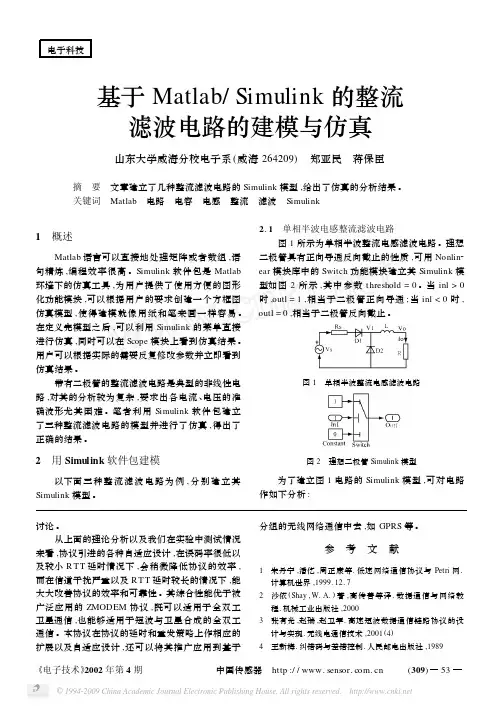
科技与创新┃Science and Technology &Innovation·148·2020年第17期文章编号:2095-6835(2020)17-0148-02基于Matlab Simulink 的同步发电机励磁系统模型的研究岳文超(连云港供电公司,江苏连云港222000)摘要:介绍了电力系统动态建模方法,对同步发电机励磁系统的构建进行了深入研究。
着眼电网的实际需求,探究使用Maltlab Simulink 模拟程序搭建电源励磁系统的数学模型,模拟获得符合实际情况的调节器设置参数,调整各参数,从而得出符合实际的励磁系统的数学模型和参数,验证了Maltlab 对电力系统进行研究的有效性和可行性。
关键词:Matlab Simulink ;励磁系统;仿真计算;数学模型中图分类号:TM31文献标识码:ADOI :10.15913/ki.kjycx.2020.17.064随着电网的范围增大,网载负荷能力增强,电网安全也面临着挑战。
发电机的励磁控制系统可以稳定频率和电压的波动,改善动态品质,提高抗干扰能力,对防止电网事故扩大起着重要作用。
建立励磁系统模型进行研究,可以精确评估电网暂态稳定性,方便对电网进行事故预想。
以往的模型动态指标采用经验值或默认值,往往与实际不符,且软件复杂,不能满足一般工作人员的需求。
且Matlab 具有更好的兼容性和友好的人机互动,应用前景巨大。
所以,利用Matlab 对励磁系统模型进行分析,一方面,可以节省分析者的时间成本;另一方面,可以提升模拟分析的的精度和指导价值。
1励磁系统工作模型原理解析励磁系统由以下两部分构成:向发电机绕组提供可控直流电流,用于建立稳定的直流磁场,称之为励磁输出模块;在正常运行或发生事故时调节及励磁电流以满足相关需求,包括励磁调节、强励磁、强减磁和自灭磁等,称为励磁控制模块。
励磁调节器与发电机的电压、电流等状态量构建联系,以预先设置的调节参数对励磁功率模块发出控制信号,控制励磁功率模块的输出,从而控制整个发电系统。
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
基于Matlab/Simulink的三相桥式全控整流电路的建模与仿真摘要本文在对三相桥式全控整流电路理论分析的基础上,建立了基于Simulink的三相桥式全控整流电路的仿真模型,并对其带电阻负载时的工作情况进行了仿真分析与研究。
通过仿真分析也验证了本文所建模型的正确性。
关键词Simulink建模仿真三相桥式全控整流对于三相对称电源系统而言,单相可控整流电路为不对称负载,可影响电源三相负载的平衡性和系统的对称性。
故在负载容量较大的场合,通常采用三相或多相整流电路。
三相或多相电源可控整流电路是三相电源系统的对称负载,输出整流电压的脉动小、控制响应快,因此被广泛应用于众多工业场合。
本文在Simulink仿真环境下,运用PowerSystemBlockset的各种元件模型建立三相桥式全控整流电路的仿真模型,并对其进行仿真研究。
一、三相桥式全控整流电路的工作原理三相桥式全控整流原理电路结构如图1所示。
三相桥式全控整流电路是应用最广泛的整流电路,完整的三相桥式整流电路由整流变压器、6个桥式连接的晶闸管、负载、触发器和同步环节组成(见图1-1)。
6个晶闸管以次相隔60度触发,将电源交流电整流为直流电。
三相桥式整流电路必须采用双脉冲触发或宽脉冲触发方式,以保证在每一瞬时都有两个晶闸管同时导通(上桥臂和下桥臂各一个)。
整流变压器采用三角形/星形联结是为了减少3的整倍次谐波电流对电源的影响。
元件的有序控制,即共阴极组中与a、b、c三相电源相接的三个晶闸管分别为VT1、VT3、VT5,共阳极组中与a、b、c三相电源相接的三个晶闸管分别为VT、VT。
它们可构成电源系统对负载供电的6条整流回路,各整流回路的交流电源电压为两元件所在的相间的线电压。
图1-1 三相桥式全控整流原理电路二、基于Simulink三相桥式全控整流电路的建模三相桥式全控整流电路在Simulink环境下,运用PowerSystemBlockset的各种元件模型建立了三相桥式全控整流电路的仿真模型,仿真结构如图2-1所示:图2-1 三相桥式全控整流电路的仿真模型在模型的整流变压器和整流桥之间接入一个三相电压-电流测量单元V-I是为了观测方便。
基于SIMULINK的永磁同步电机控制系统的仿真设计中文摘要在MATLAB/SIMULINK中建立独立的功能模块主要有:PMSM本体模块、矢量控制模块、电流滞环控制模块、速度控制模块等。
同时进行功能模块的有机整合,搭建PMSM控制系统的仿真模型采用双臂环控制,速度环采用PI控制,电流环采用滞环电流控制。
仿真结果证明了该方法的有效性,同时该模型也适用于验证其他控制算法的合理性,为实际电机控制系统的设计和调试提供的新的思路。
为了实现高性能的电流环控制,对比了常规电流滞环控制和三角波载波比较方式的电流滞环控制。
在MATLAB中搭建了两种电流滞环控制方式的仿真模型,通过仿真得出采用常规电流滞环控制对系统的整体性能影响比较大,而采用三角载波比较方式的电流滞环控制容易获得良好的控制效果。
采用三角载波比较方式的电流滞环控制的仿真结果进一步验证了本文分析的正确性,并且为系统的整体设计提供了理论基础。
关键词:永磁同步电动机;SIMULINK;电气系统模型库Simulation of control system for the Permanent MagentSynchronousAbstractThe paper as the example of the control system of permanent synchronous motor, mainly introduces how to get the simulation of AC driven system under the environment of SIMULINK by using the toolbox of power system, then discusses the effect of adjuster PI on the revolution during suddenly changed load.In MATLAB/SIMULINK it establishes the independent function modules; PMSM body module, vector control module, the current hysteresis control, speed control module, function module and so on. At the same time, it integrates the function module and establishes the simulation module of PMSM control system. this system adopts double closed-loop control system, the PI control the speed loop, the sluggish loop electric current controls electric current loop the simulation result proves the effective method of the indeperdent function modules. This model also applies to test and verify the reasonableness of thought for both design of practical electrical engineering control system and debugging.For the sake of high-performance current-loop in position servo system, we studied general hysteresis-band current-control and triangular carrier wave hysteresis-band current-control. Simulation models of the two mode were build in MATLAB, by the simulation analysis, we can know that general hysteresis-band current-control will seriously influence on performance of system, and triangular carrier wave hysteresis-band current-control can be used for good control performance. When triangular carrier wave hysteresis-band current-control was used, analytical results are good agreement with the feasible simulation results, and the results can provide theoretical basis for the design of servo system.Key words: permanent magnet synchronous motor; SIMULINK; toolbox of power system.目录第一章前言 (1)1.1课题研究背景 (1)1.1.1永磁同步电机发展状况 (1)1.1.2永磁同步电机控制系统的发展 (1)1.1.3计算机仿真技术的发展 (3)1.2MATLAB简介 (3)1.2.1 MATLAB软件的简介 (3)1.2.1 MATLAB仿真工具箱简介 (8)1.3本文主要任务 (9)第二章永磁同步电机的结构及其数学模型 (9)2.1永磁同步电机的概述 (9)2.1.1 同步电机的基本工作原理 (9)2.1.2 永磁同步电机的基本结构及其分类 (9)2.1.3 永磁同步电机的特点与应用 (11)2.2永磁同步电机的数学模型 (13)2.2.1 电压平衡方程 (14)2.2.2 磁链方程及感应电动势方程 (15)2.3永磁同步电机在各个坐标系下的数学模型 (17)2.3.1 磁同步电机A-B-C坐标下数学模型 (17)α-坐标系下数学模型 (18)2.3.2 磁同步电机β2.3.3 永磁同步电机d-q坐标系下数学模型 (18)第三章永磁同步电机控制系统工作原理 (19)3.1PWM(PULSE-WIDTH MODULATION)技术 (19)3.2PMSM控制系统的组成 (22)3.3PMSM控制系统的运行原理 (23)第四章永磁同步电机控制系统仿真设计 (24)4.1D-Q坐标系与ABC三相坐标系转换 (24)4.2PI调节器 (27)4.3利用SIMULINK构建PMSM控制系统仿真模型 (30)4.4仿真结果 (31)全文总结 (35)致谢 (36)参考文献 (37)附录 (38)第一章前言1.1课题研究背景1.1.1 永磁同步电机发展状况永磁同步电机出现于20世纪50年代。
基于SIMULINK的整流电路的设计与仿真研究摘要:MA TLAB是一种科学计算软件,它是一种以矩阵为基础的交互式程序计算语言。
SIMULINK是基于框图的仿真平台,它挂接在MATLAB环境上,以MATLAB的强大计算功能为基础,以直观的模块框图进行仿真和计算。
本文主要以MA TLAB/SIMULINK仿真软件为基础,完成了对整流电路的建模与仿真,并且给出了仿真结果波形,同时根据仿真结果进行了分析和计算。
证实了该方法的简便直观、高效快捷和真实准确性。
关键字:MA TLAB/SIMULINK;建模;仿真;整流电路一、前言在电力电子电路如变流装置的设计过程中,需要对设计出来的初步方案及有关元件参数选择是否合理,效果如何进行验证。
采用MA TLAB/SIMULINK可视化图形化仿真环境来对电力电子电路进行建模仿真则可使之变得直观,简单易行,效率高且真实准确。
本课题主要研究的是利用MATLAB/SIMULINK建立电力电子电路仿真模型并进行仿真。
对单相整流电路和三相整流电路主要研究其半波可控和桥式全控整流电路,分别建立其Simulink仿真模型,进行系统仿真,对其仿真波形进行对比分析,并与理论结果进行对比。
利用Simulink中的模块库建立单相/三相整流电力变换电路,进行仿真后,对仿真波形进行比较分析,证实了该方法的简便直观、高效快捷和真实准确性。
由于计算机中修改参数方便,可以通过改变方针参数就可观察各种现象,加深了对其电路原理的理解。
同时,通过对本课题的研究最终能够熟悉并掌握Matlab /Simulink的应用环境,熟练应用Simulink模块库中模块建立电力电子电路的系统仿真模型,设定系统仿真参数,进行系统仿真。
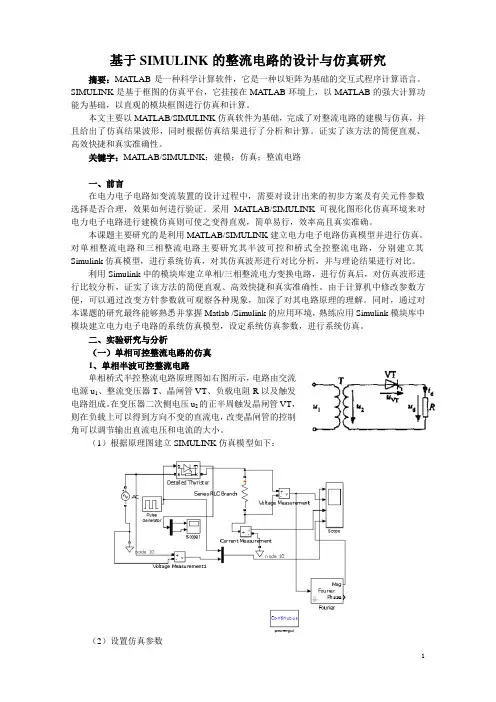
二、实验研究与分析(一)单相可控整流电路的仿真1、单相半波可控整流电路单相桥式半控整流电路原理图如右图所示,电路由交流电源u1、整流变压器T、晶闸管VT、负载电阻R以及触发电路组成。
在变压器二次侧电压u2的正半周触发晶闸管VT,则在负载上可以得到方向不变的直流电,改变晶闸管的控制角可以调节输出直流电压和电流的大小。
基于MATLAB-SIMULINK开关磁阻电机非线性建模方法研究与实践基于MATLAB/SIMULINK开关磁阻电机非线性建模方法研究与实践摘要:随着电力系统的发展和节能环保的需求,开关磁阻电机作为一种新型电机逐渐引起了人们的关注。
为了更好地了解开关磁阻电机的特性和性能,本文提出了一种基于MATLAB/SIMULINK的非线性建模方法,并进行了实践验证。
通过该方法,我们可以更好地预测开关磁阻电机在不同工况下的运行情况,为其在实际应用中的优化设计和控制提供参考依据。
关键词:开关磁阻电机;非线性建模;MATLAB/SIMULINK引言开关磁阻电机是一种新型的电机,具有启动、调速范围广、电磁容量大和高效节能等诸多优点。
因此,它在电力系统中的应用前景十分广阔。
为了更好地研究和应用开关磁阻电机,我们需要了解其特性和性能,以便优化其设计和控制。
而非线性建模方法提供了一种有效的手段来描述开关磁阻电机的非线性动态特性。
研究背景开关磁阻电机的非线性动态特性使得传统的线性建模方法难以准确描述其行为。
因此,我们需要一种非线性建模方法来更好地揭示其特性。
目前,基于MATLAB/SIMULINK的非线性建模方法已经被广泛应用于各种电机的研究中,并取得了很好的效果。
建模方法1.建立电机的结构模型:根据开关磁阻电机的结构和工作原理,我们可以构建其结构模型。
通过分析各个部件之间的关系和相互作用,确定各个参数和变量的表达式。
2.建立电机的动态模型:根据电机的结构模型,我们可以建立其动态模型。
考虑到开关磁阻电机的非线性特性,我们可以采用多项式等函数逼近的方法来描述其非线性行为。
3.验证模型的准确性:通过实验数据对建立的模型进行验证。
将实际测得的数据与模型仿真的数据进行对比,评估模型的准确性和可行性。
实验与结果我们选取一台实际的开关磁阻电机进行了实验,通过传感器采集了电机转速、电流和电压等数据,并将其输入MATLAB/SIMULINK中进行仿真实验。

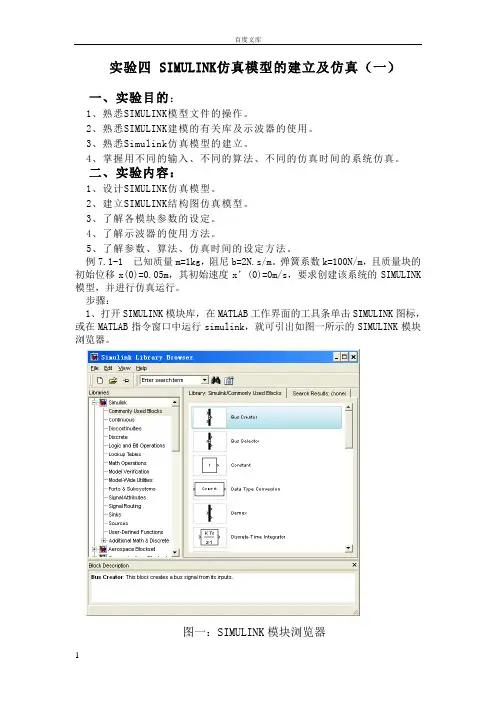
实验四 SIMULINK仿真模型的建立及仿真(一)一、实验目的:1、熟悉SIMULINK模型文件的操作。
2、熟悉SIMULINK建模的有关库及示波器的使用。
3、熟悉Simulink仿真模型的建立。
4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。
二、实验内容:1、设计SIMULINK仿真模型。
2、建立SIMULINK结构图仿真模型。
3、了解各模块参数的设定。
4、了解示波器的使用方法。
5、了解参数、算法、仿真时间的设定方法。
例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。
弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。
步骤:1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。
图二:已经复制进库模块的新建模型窗3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。
4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。
5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。
如图三所示:图三:已构建完成的新模型窗6、根据理论数学模型设置模块参数:①设置增益模块<Gain>参数,双击模型窗重的增益模块<Gain>,引出如图四所示的参数设置窗,把<Gain>增益栏中默认数字改为2,单击[OK]键,完成设置;图四:参数已经修改为2的<Gain>增益模块设置窗②参照以上方法把<Gain1>增益模块的增益系数改为100;③修改求和模块输入口的代数符号,双击求和模块,引出如图五所示的参数设置窗,把符号栏中的默认符号(++)修改成所需的代数符号(--),单击[OK]键,完成设置;图五:改变输入口符号的求和模块参数设置窗④对积分模块<Integrator1>的初始状态进行设置:双击积分模块<Integrator1>,引出如图六所示的参数设置窗,把初始条件Initial condition 栏中的默认0初始修改为题目给定的0.05,单击[OK]键,完成设置。
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真一、本文概述随着电力电子技术和控制理论的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、风力发电、机器人和工业自动化等领域得到了广泛应用。
然而,PMSM的高性能运行依赖于先进的控制系统,其中矢量控制(Vector Control, VC)是最常用的控制策略之一。
矢量控制,也称为场向量控制,其基本思想是通过坐标变换将电机的定子电流分解为与磁场方向正交的两个分量——转矩分量和励磁分量,并分别进行控制,从而实现电机的高性能运行。
这种控制策略需要对电机的动态行为和电磁关系有深入的理解,并且要求控制系统能够快速、准确地响应各种工况变化。
MATLAB/Simulink/SimPowerSystems是MathWorks公司开发的一套强大的电力系统和电机控制系统仿真工具。
通过Simulink的图形化建模环境和SimPowerSystems的电机及电力电子元件库,用户可以方便地进行电机控制系统的建模、仿真和分析。
本文旨在介绍基于MATLAB/Simulink/SimPowerSystems的永磁同步电机矢量控制系统的建模与仿真方法。
将简要概述永磁同步电机的基本结构和运行原理,然后详细介绍矢量控制的基本原理和坐标变换方法。
接着,将通过一个具体的案例,展示如何使用Simulink和SimPowerSystems进行永磁同步电机矢量控制系统的建模和仿真,并分析仿真结果,验证控制策略的有效性。
将讨论在实际应用中可能遇到的挑战和问题,并提出相应的解决方案。
通过本文的阅读,读者可以对永磁同步电机矢量控制系统有更深入的理解,并掌握使用MATLAB/Simulink/SimPowerSystems进行电机控制系统仿真的基本方法。
simulink同步电机励磁控制1.引言在电力系统中,同步电机是一种常见的电动机类型,其具有高效率、高功率因数和稳定性等优点,因此被广泛应用于工业生产和交通运输等领域。
为了实现同步电机的有效控制,励磁控制是至关重要的环节之一。
本文将介绍如何使用Si m ul in k软件进行同步电机励磁控制。
2.励磁控制的基本原理励磁控制是指通过调节同步电机的励磁电流,控制其磁场强度,从而影响电机的输出特性。
励磁控制的基本原理是根据同步电机的运行状态和负载要求,通过调节励磁电流的大小和相位,使得电机的输出电压和频率达到期望值。
3.同步电机励磁控制系统概述同步电机励磁控制系统由控制器、励磁装置和同步电机组成。
控制器通过采集同步电机的状态信息,计算出励磁电流的控制信号,然后发送给励磁装置。
励磁装置根据控制信号,调节励磁电流的大小和相位。
最后,调节后的励磁电流进入同步电机,控制磁场强度,实现电机的励磁控制。
4. Si mulink建模步骤4.1系统建模在S im ul in k中,首先需要建立同步电机励磁控制系统的模型。
可以使用已有的S im ul in k库中的电机模型或者自行建立一个电机模型。
在建模时,需要考虑同步电机的基本参数,如电机的额定电压、额定频率、暂态和稳态的电机参数等。
4.2控制器设计在S im ul in k中,设计励磁控制器需要选择适当的控制策略。
常用的励磁控制策略包括比例-积分(P I)控制、模糊控制和自适应控制等。
根据电机系统的要求和性能指标,选择合适的控制策略,并将其实现在S i mu li nk中。
4.3励磁装置建模在S im ul in k中,可以选择合适的装置模型来代表励磁装置。
根据电机的实际情况,选择合适的电路模型或者控制算法,在Si mu li n k中进行建模和仿真。
4.4仿真和优化在S im ul in k中,通过对建立好的模型进行仿真,可以评估励磁控制系统的性能和稳定性。
根据仿真结果,进行必要的优化和调整,以达到预期的控制效果。
simulink中excitation system模块讲解在Simulink中,励磁系统(Excitation System)模块用于模拟电力系统的励磁控制装置。
励磁系统的主要功能是控制发电机的励磁,以维持发电机的电压稳定。
励磁系统模块通常由多个子模块组成,每个子模块代表励磁系统的一个部分。
以下是励磁系统模块的主要子模块及其功能:1. AVR(Automatic Voltage Regulator)模块:AVR模块用于控制发电机的电压。
它通过比较发电机输出电压与设定值之间的差异,并根据控制策略调整励磁电流,以使发电机的电压保持在设定范围内。
2. PSS(Power System Stabilizer)模块:PSS模块用于增强发电机的稳定性。
它通过监测发电机转子角度的变化,并根据控制策略调整励磁电流,以抑制发电机振荡和提高系统稳定性。
3. Exciter模块:Exciter模块用于产生励磁电流。
它接收来自AVR和PSS模块的控制信号,并根据控制策略生成相应的励磁电流。
4. Voltage Limiter模块:Voltage Limiter模块用于限制发电机的电压。
它监测发电机输出电压,并根据设定的上下限值调整励磁电流,以防止电压超过安全范围。
5. Feedback模块:Feedback模块用于提供反馈信号给AVR和PSS模块。
它监测发电机输出电压和转子角度,并将这些信息反馈给控制模块,以帮助调节励磁电流。
在Simulink中,可以通过连接这些子模块来构建完整的励磁系统模型。
用户可以根据实际需求选择不同的励磁系统模型和参数,并通过调整控制策略来优化发电机的励磁控制效果。
模型可以使用不同的信号源(如阶跃信号或正弦信号)进行仿真,以评估励磁系统在不同工况下的性能。
总之,Simulink中的励磁系统模块提供了一个方便且灵活的工具,用于模拟和优化电力系统中发电机的励磁控制装置。
通过调整模型参数和控制策略,用户可以改善发电机的电压稳定性和系统稳定性。
发电机励磁系统建模及参数测试现场试验方案一、背景介绍发电机励磁系统是发电机的重要组成部分,控制和调节发电机输出电压和电流的稳定性。
励磁系统的合理运行对于保证发电机的安全运行和电力系统的稳定性至关重要。
因此,对发电机励磁系统建模和参数测试进行现场试验是必要的。
二、试验目的1.建立发电机励磁系统的数学模型,准确描述其工作原理,对励磁系统进行仿真分析。
2.测试励磁系统参数,评估其性能和稳定性,发现存在的问题并提出优化建议。
三、试验方案1.建模与仿真1.1收集和分析发电机的电气参数,包括发电机的电感、电阻、励磁电枢电阻、励磁电枢电感等。
1.2根据收集的参数,建立发电机励磁系统的数学模型。
模型可以采用经典的励磁系统模型,如PI控制、PID控制等。
1.3 利用仿真软件,如MATLAB/Simulink,进行励磁系统的仿真分析,观察发电机输出电压和电流的波形,评估励磁系统的性能和稳定性。
2.参数测试2.1制定测试计划,明确测试的参数和步骤。
2.2测试发电机励磁系统的基本参数,包括励磁电流、励磁电流反馈回路增益、励磁电枢电流反馈系数等。
2.3测试励磁系统的稳定性参数,如动态响应时间、控制精度、超调量等。
2.4根据测试结果,分析励磁系统的工作状态和性能,对比模拟结果,确定是否存在问题。
3.问题发现与优化建议3.1根据测试结果和模拟分析,发现存在的问题,如励磁系统的响应速度过慢、控制精度不高等。
3.2针对存在的问题,提出优化建议,如调整控制器参数、增加反馈环节等。
3.3制定优化方案,对励磁系统进行优化,并再次进行现场试验,验证优化效果。
四、试验计划1.准备工作1.1收集发电机的电气参数,包括电感、电阻等。
1.2确定试验设备和工具,如发电机功率测试仪、多用表等。
1.3建立仿真模型,准备仿真软件。
2.建模与仿真2.1建立发电机励磁系统的数学模型。
2.2利用仿真软件进行仿真分析。
3.参数测试3.1制定测试计划,明确测试的参数和步骤。
基于Matlab_Simulink的永磁直驱风⼒发电机组建模和仿真研究-2发电机参数:极对数42;d 轴电抗1.704mL ;q轴电抗1.216mL ;转⼦磁通4.7442Wb ;转动惯量11258J 。
PI 参数:⽹侧电流内环d 轴(1.5、1),q 轴(0.5、37);⽹侧功率外环(0.0002、0.05);直流侧电压(2、120);机侧电流内环d 轴(-3、-24),q 轴(-3、-80);机侧功率外环(-3、-60)。
本仿真中风速由6m/s 变化到9m/s ,最后变化到12m/s 。
在最⼤风能捕获控制情况下,随着风速的变化,转⼦转速不断调整,以保持最佳叶尖速⽐,从⽽达到最⼤风能利⽤,图8为风速、转⼦转速、机械和电磁转矩变化曲线。
机侧电压电流变化如图9所⽰,在最⼤风能捕获模式下,电压和电流频率随着风速的增⼤⽽增⼤,电压幅值从260V 变化到400V 、540V ,电流幅值变化为380A 、850A 、1500A 。
电⽹侧及直流侧电压电流变化如图10所⽰,电⽹电压保持恒定,电流幅值随着风速的增⼤⽽增⼤变化范围为:168A 、580A 、1290A 。
直流侧电压在风速突变时有⼀个充电过程,电压升⾼,最⾼达到1320V ,经过⼤约0.1s的暂态过程后恢复到额定值1200V 。
永磁直驱发电机输⼊电⽹有功及⽆功功率如图11所⽰,有功功率随着风速的升⾼⽽不断变化,最后维持在1.1MW ,⽆功功率基本保持为零,波动幅值为5kW 。
实际输出有功功率与参考功率的⽐较如图12所⽰,在风速突变后参考功率⼤于实际输出功率,经过⼤约0.1s 的暂态过程后基本吻合。
永磁直驱发电系统机侧及⽹侧电压电流的d 、q 轴分量的变化如图13、14所⽰。
机侧电压d 、q 轴分量随着风速变化⽽变化,机侧电流采⽤零d 轴控制策略,所以d 轴分量维持为零,q 轴分量反映功率的变化。
⽹侧电压保持恒定,因为⽆功参考值为零,所以图11输⼊电⽹有功及⽆功功率Fig.11Active and reactive power input togrid图12输⼊电⽹有功功率与参考功率图Fig.12Active power input to grid and it ’sreference第27卷第9期电⽹与清洁能源图10电⽹侧及直流侧电压电流变化Fig.10Variation of voltage and current of grid and DC side 图9机侧电压电流变化Fig.9Variation of generator-side voltage andcurrent图8风速、转⼦转速、转矩变化Fig.8Variation of wind speed,rotor speed andtorqueClean Energy97电流q 轴分量为零。
基于simulink的发电机励磁系统整流单元的建模与仿真
1、前言
发电机的励磁系统是保证稳定的发电能力的关键组成部分。
整流单元是励磁系统的核心部件,它将交流电转换成稳定的直流电,为发电机励磁提供所需电能。
在此基础上,本文基于Simulink软件对发电机励磁系统的整流单元进行建模和仿真,
以验证其工作可行性。
2、建模
整流单元主要由桥式整流器和滤波器组成,其中桥式整流器将交流电转换成直流电,滤波器通过对直流电的滤波作用,使电源电压更加稳定。
在建模过程中,我们采用了经典的三相桥式整流器拓扑结构,如图1所示。
图1 三相桥式整流器电路图
图1中,V1、V2和V3分别表示三相交流输入电压,D1、D2、D3、D4、D5和D6为六个二极管,用于将交流电转换成直流电。
VO为直流输出电压,L1、L2为平滑器电感,C1、C2为
平滑器电容,用于滤波。
3、仿真
在Simulink软件中建立基于上述电路结构的仿真模型,所示。
在仿真模型中,我们通过三相正弦波电压源模块来模拟输入的三相交流电压信号。
在整流器模块中,我们采用了开关模型来模拟三相桥式整流器和二极管,模拟电阻和电感则分别用电感模块和电容模块进行建模。
在滤波器模块中,我们采用了L-C
滤波器的模型。
仿真结果如图3所示,其中红色曲线为输入电压,绿色曲线为输出电压。
由图可知,输入的交流电压被成功转换为直流电,并通过滤波器后得到了更加稳定的直流电输出。
4、结论
本文通过Simulink软件对发电机励磁系统整流单元进行了建
模和仿真。
仿真结果表明,利用三相桥式整流器及L-C滤波
器构成的整流单元可以成功将三相交流电转换为直流电,并滤波得到更加稳定的直流电输出,为发电机励磁系统提供所需电能。
这对于保证发电机稳定输出电能具有重要作用,有利于电力系统的运行和调节。