基于MC33035的大型绘图仪字车控制系统
- 格式:pdf
- 大小:210.17 KB
- 文档页数:2

直流无刷电机驱动器ATE33035使用说明介绍ATE33035(替代MC33035)是一种单片的直流无刷电机控制器,它包含了开环控制的三、四相电机控制系统所需的全部功能。
此外,也可以用于控制直流有刷电机。
采用双极性模拟技术,其全功能和高耐用性非常适合与恶劣的工业环境。
功能包括:1、准确转动位置测序的转子译码器;2、参考与电源电压传感器的温度补偿;3、可预设频率的锯齿波振荡器;4、全接近误差放大器;5、脉宽调制比较器;6、上部的三个集电极开路驱动器;7、下部的三个用于驱动功率场效应管MOSFET的大电流图腾柱电路。
保护功能包括:1、欠压锁定;2、可预设关断延迟时间的逐周期电流限制模式;3、内部热关断;4、可以连接到微处理器控制系统的故障输出端口。
电机控制功能包括:1、开环时间控制;2、正、反向运行控制;3、可控的启用和制动。
4、可以通过60°/ 120°选择引脚设置转子位置解码器,用于60°或120°的电机相位传感器输入。
方框图功能说明典型应用方框图见图19,其它各种应用方框图见图36,38,39,43,45和46。
下面各种方框图中关于内部功能和特性的说明,都要参照图19和图36。
转子位置译码器内部转子位置译码器监控三个传感器输入(管脚4,5,6)为上部和下部驱动提供适当的输出顺序。
传感器输入端口设计为可以直接连接到集电极开路型霍尔效应开关或光电耦合器(通过旋转开槽孔)。
内部上拉电阻可以保证外部器件的小信号输入有效。
兼容典型门限为2.2 V 的TTL电平输入。
ATE33035设计用于常用的三、四相位传感器的电动机控制。
通过管脚22(60°/120°选择输入)可以便利的完成A TE33035内部设置,能够控制60°、120°、240°和300°电相位传感器的电动机。
三个传感器输入能够组合成八组可能的输入代码,其中的六组用于有效转子位置。

MC33035芯片对无刷直流电机驱动系统设计
一、无刷直流电机控制设计
二、无刷直流电机驱动电路设计
在选择功率管时,需要考虑电机的驱动需求和电机的特性。
通常选择
耐压高、开关速度快的功率管,以提高电机的性能和驱动效率。
功率管驱动电路设计要保证稳定、快速的开关过程。
可使用反相器、
驱动电流放大器等电路来实现功率管的驱动。
此外,还需要考虑驱动电路
的功率损耗和保护电路,以提高系统的可靠性。
三、无刷直流电机驱动系统通信接口设计
在通信接口设计中,需要考虑通信协议和数据传输速率等方面的设计。
通信协议可选择SPI、I2C等,要根据系统的要求和外部设备的兼容性进
行选择。
数据传输速率应根据系统的实时性要求和通信距离等因素进行优化。
根据实际情况选择合适的传输速率,以保证系统的性能和稳定性。
四、无刷直流电机驱动系统保护设计
无刷直流电机驱动系统中应包含一些保护功能,以避免电机和驱动器
的损坏。
常见的保护功能包括过压保护、过流保护、过热保护等。
过压保护可通过采用过压检测电路来实现,一旦检测到过压情况,即
可切断电机的电源,保护电机和驱动器的安全。
过流保护可通过电流检测电路来实现,一旦检测到过流情况,即可切
断电机的电源或降低电机的功率输出。
过热保护可通过温度传感器来实现,一旦检测到电机或驱动器温度过高,即可切断电机的电源或降低电机的功率输出。

1 MC33035功能介绍MC33035是安森美公司推出的第二代无刷直流电机控制专用集成电路,主要组成部分包括转子位置传感器译码电路、带温度补偿的内部基准电源、频率可设定的锯齿波振荡器、误差放大器、脉宽调制(PWM)比较器、输出驱动电路、欠压封锁保护、芯片过热保护等故障输出电路和限流电路等。
MC33035的典型控制功能包括PWM速度控制、使能控制(启动或停止)、正反转控制、相位选择和制动控制等。
芯片功能引脚定义如表1所列。
SA、SB、SC为霍尔信号输入端,内部上拉20 kΩ电阻,外接霍尔传感器即可。
Fwd/Rew、Brake、Output Enable和60°/120°Select分别为方向、制动、使能和霍尔相位控制端口,内部上拉40 kΩ电阻,MCU控制端只要通过光耦或者三极管开漏接地即可进行控制。
如果不采用IC内置的硬件速度环,则将PIN12、13短接,通过PIN11端口输入PWM即可对电机进行调节控制。
如果采用IC内置的硬件速度环则将PIN12、13通过R、C连接,通过PIN11端口输入PWM进行电机控制,HALL换向反馈信号通过PIN12端口输入。
2 基于MC33035的直流无刷电机控制驱动电路设计在本设计中主控制器以Freescale公司的基于PowerPC构架的32位处理器MPC5604P为例,MPC5604P控制端口通过比较器和MC33035接口,设计了基于MC33035直流无刷电机控制驱动电路。
传统的直流无刷电机控制驱动电路采用MPC5604P、预驱动IC和MOSFET 实现,其中包括电压泵即自举电路。
本设计是基于直流无刷电机控制芯片MC33035实现的,MC33035实现预驱动和电子自动换向功能,采用MC33035实现直流无刷电机的控制驱动电路,既简化了电路设计,同时也减轻了MPC5604P 的运算量。
MPC5604P和MC33035之间通过光耦或者比较器实现电平转换。

基于MC33035+MC33039的直流无刷电机速度闭环控制系统设计作者:应弋翔何嘉冰李沈崇史亦飞许宇翔来源:《科技创新与应用》2019年第24期摘; 要:文章详细介绍了Motorola公司的第二代直流无刷电机控制器专用芯片MC33035的基本原理,在分析了直流无刷电机的结构特点及应用现状后,设计了基于MC33035和MC33039及一些集成电路构成的小功率直流无刷电机的速度闭环控制系统,并进行了调试及试验,确认了其简单和优越的控制性能。
在设计的过程中加入了电机的过温保护,使无刷电机在实际工作环境中无故障安全运行。
关键词:MC33035;MC33039;直流无刷电机;闭环控制中图分类号:TM359.9 文献标识码:A 文章编号:2095-2945(2019)24-0049-04Abstract: In this paper, the basic principle of MC33035, a special chip for the second generation brushless DC motor controller made by Motorola Company, is introduced in detail. After analyzing the structure characteristics and application status of the brushless DC motor, the speed closed loop control system of low power brushless DC motor based on MC33035, MC33039 andsome integrated circuits is designed, debugged and tested, and its simple and superior control performance is confirmed. In the process of design, the overtemperature protection of the motor is added, so as to make the brushless motor operate safely without fault in the actual working environment.Keywords: MC33035; MC33039; brushless DC motor; closed-loop control 引言近年來,我国中小型电机和特微电机行业迅速发展,其中直流无刷电机以其高效低噪等特点逐渐取代有刷电机,成为行业的一颗新星。
收稿日期:2005-07-20基金项目:华东交通大学校立科研基金项目资助作者简介:高彦丽(1978-),女,山西临汾人,讲师.文章编号:1005-0523(2006)01-0125-04基于MC33033和CPLD 的自动门控制系统高彦丽,陈忠斌(华东交通大学电气与电子工程学院,江西南昌330013)摘要:介绍了以CPLD 和电机控制器MC33033为核心的自动门控制系统,CPLD 实现自动门的运行状态控制,MC33033实现自动门往返运行以及正反转分别调速,实现自动门的智能化控制.该控制系统的特点是简单、可靠、开发成本低.文中给出了实验结果.关 键 词:自动门;C PLD;MC33033中图分类号:TP273 文献标识码:A1 引言自动门以其方便、安全、节能以及低噪音等特点为许多宾馆、超市、百货大楼等现代化建筑所必备.本文采用模块化的设计方案,自动门控制系统采用基于CPLD 的VHDL 语言设计主控制器的状态转换;电机专用控制芯片MC33033来控制电机的正、反转以及分别调速,保证系统的可靠运行;由于设计采用了EDA 技术而非传统的单片机设计,这是一种自上向下的设计方法,使得系统的开发周期短,成本降低[1-3].模块化的设计便于系统的升级和维护.2 系统构成系统总框图如图1所示.图中控制信号来源于外部输入,如手动按钮、红外感应器件以及无线遥控器件等.自动门状态控制电路用一片CPLD,根据控制信号以及位置和遇阻等外部信号来完成对门运行状态的转换控制,为电机控制电路提供正转、反转和停止信号;电机控制电路则根据主控制器发出的正反转以及停控制信号来控制电机的开关停以及实现自动门正反运行分别调速.设计重点为自动门状态控制器电路和电机控制电路.3 自动门状态控制电路本设计采用VHDL 语言的状态机设计法进行设计,通过编译、仿真、综合、配置,最终在CPLD 上实现逻辑功能[4].第23卷第1期2006年2月华东交通大学学报Journal of East China Jiaotong Universi ty Vol.23 No.1Feb.,20063.1 状态控制电路的VHDL 设计自动门的运行状态图如图2所示.图中:x1、x2、x3分别表示开、关、停控制信号;x4表示门在运行过程中遇到障碍时传感器发出的信号;x5表示门完全闭合,即运行到0位置时传感器发出的信号;x6表示表示门完全打开,即运行到底位置时传感器发出的信号.COUT 为控制器内部的定计时控制信号.(这里假定三个暂停状态的暂停时间一样)s0表示电动门处于零位置状态,此时电动门处于关闭的位置;s1表示电动门开的状态,电机正转的情况;s2表示电动门关的状态,电机反转的情况;s3表示的是电动门停止状态,此时电机停止转动;s4表示电动门处于底位置状态,此时电动门处于开的临界位置;s5表示在反转过程中电动门遇到障碍的暂停状态;s6表示在正转过程中电动门遇到障碍的暂停状态.Z1,Z2,Z3分别表示控制器发给电机控制电路的开、关、停控制信号;自动门的运行过程:开始处于闭合状态即s0位置,只有在获得正转信号时,才会改变状态,转入s1状态,表示电动门开状态,电机正转.开关门过程中如遇到阻力则暂停一段时间,然后自动继续原来的开关门动作.运行过程中,遇到停信号以及0位置则停,遇到底位置信号则暂停一段时间,然后自动执行关门动作.以开门过程为例:电动门处于开的状态时,遇到输入是遇到障碍信号,就进入s5状态,即在正转过程中电动门在遇到障碍时的暂停状态;若遇到输入是停信号时,就进入s3状态;若遇到输入是关信号时,就进入s2,即电动门关的状态;若遇到底位置信号,就进入s4状态,即电动门处于底位置时的暂停状态.关门动作也具有相似的过程.3.2 仿真实验MAX+PLUS 下的仿真波形如图3所示.由仿真波形可以看出:在清零信号reset 为高电平时,电路会回到原来的初始状态,即s0状态.先给电路一个清零信号后,电路处于s0状态,comb outputs=1(Z3=1表示电机停止),此时,图中给它一个x1正转信号,在遇到脉冲为上升沿时,由下面两行输出可知comb outputs=4(Z1=1表示电机正转)电路将进入s1状态,(即电动门开,电机正转);之后又给了x2反转信号,同样可以看到comb outputs=2(Z2=1表示电机反转),电路进入了s2状态(即电动门关,电机反转);后给一个x3停止信号,同样可以看到comb outputs =1(Z3=1表示电机停止),电路进入了s3状态(即电动门停止运行);如在电机正转的情况下,给x4信号(电动机在遇到障碍时的信号),电机将进入停止状态,此时电动门的状态是s5(即:在正转过程中电动门在遇到障碍时的暂停状态),此时,再看ten 信号的波形、计数信号q 状态,ten 信号由低电平向高电平转变,计数信号由原来的0,不断地加1直到15为止,又进入到此暂停状态的开始状态(s1状态),设计完全满足要求.126华东交通大学学报 2006年4 电机控制电路设计为了使电机的控制简便可靠,使用了电机专用控制芯片MC33033,该芯片是MOTORLA 公司生产的一种高性能直流电机控制器,可对直流电机速度进行开环和闭环控制,亦可分别对电机正反转进行调速.MC33033内含三个集电极开路的顶部驱动器和为MOSFE T 驱动电源而设计的三个高电流推拉式底部驱动器,并具有电机过流检测和保护功能.可用于控制三相无刷直流电机,也可用于单相有刷直流电机,本文利用MC33033构成单相H 桥有刷直流电机控制电路,实现对自动门的正反转控制以及正反转的分别调速[5-7].图4是MC33033电机控制器的内部电路原理框图,它由转子位置译码器、基准电压源、振荡器、误差放大器、脉冲宽度调制器(PW M )以及欠压锁定、过流限制、热关断和输出驱动电路组成.若在传感器的输入端(pin4,pin5,pin6)加上某个输入码,如100,则当控制器的正转/反转引脚为逻辑1时,输入码使输出2,15产生驱动,当控制器的正转反转为逻辑0时,输入码使输出20,17产生驱动.MC33033应用到自动门的电机控制原理如图5所示,主要由逻辑控制电路、正反转分别调速电路和H 桥驱动电路三部分组成.开关管采用MOS 对管IRF540和I RF9540,直流无刷电机直流电压DC12-24V,力矩为5牛顿,自带变比为3600/18齿轮减速装置.电机的运行方向受正转/反转和输出使能引脚控制,输入的电机信号有正转、反转和停止三种.逻辑运算电路实现停止、正转、反转三个输入信号的优先级控制,其优先级高低顺序是停止、正转、反转.正转和反转信号经过逻辑控制电路接入正反转输入端,如果该端为高电平时,MC33033将使AT 输出高电平,开关Q1导通,同时CB 端输出PW M 调制波形,开关Q4相应动作,从而实现电机正转并进行速度调整;反之,MC33033将使AB 输出高电平,开关Q2导通,同时C T 端输出PW M 调制波形,开关Q3相应动作,从而实现电机反转并进行速度调整.停止信号接入到MC33033的19(使能端),如果它为127第1期 高彦丽,等:基于MC33033和CPLD 的自动门控制系统高电平时,芯片将停止正常工作,此时就能实现电机的停转.图6所示为输入低电平时控制器输出端17、20的输出波形,电机反转,图中C H1曲线为控制器振荡器输出波形,正常工作时频率为25kHZ,C H2曲线为17端输出波形,是驱动Q3管的PW M 波形,CH3曲线为20端输出波形,它为一幅值约为12V 的直流信号,Q2管一直导通.当电机控制信号输入正转信号时,正反转输入端为高电平,U2A 光电隔离不会导通,U2B 光电隔离导通,此时,L2发光二极管会发光,表示正转,高电平将通过RP2、二级管D2输入到误差放大器的同相输入端,其电压可以通过滑动变阻器RP2来调整,误差放大器的反向输入端和输出端相连,同时作为PWM 比较器的反向输入,与振荡器输出端的振荡波形比较,从而产生PW M 波形来控制Q4的输出,从而调整电动机正转时的端电压,实现电机正转调速.当电机控制信号输入反转信号时,正反转输入端为低电平,在经过4011与非门得出高电平,U2A 光电隔离导通,U2B 光电隔离不会导通,此时,L1发光二极管会发光,表示反转,高电平将通过RP1、二级管D1输入到误差放大器的同相输入端,同样通过PW M 比较输出控制Q3的PWM 脉冲,从而调整电动机反转时的端电压,实现电机反转调速.这就是电机部分如何实现电机正转、反转、停止以及正反转分别调速的过程.5 小结本文所设计的自动门控制器,已经通过了实验检验和调试,由于缺少机械转换装置因此尚未做成产品,后续工作应该转化为产品并进行实践的进一步检验和改进,即可投放市场.参考文献:[1]徐庆继.西门子LOGO!在自动门控制系统中的应用[J].现代技能开发,2003(12)110-111.[2]姚卫丰.基于PLC 控制的自动门系统[J].自动化与仪表,2002(6)64-65.[3]陈小兰,肖 化.基于PIC 单片机的自动门控制器设计[J].华南师范大学学报(自然科学版),2001(1)68-70.[4]潘 松,黄继业.EDA 技术实用教程[M].北京:科学出版社,2002.[5]孙中禹,杨友社.直流电机控制器MC33033及其应用电路[J].国外电子元器件,2000(5)19-22.[6]吴玉香.无刷直流电机在自动门控制中的应用.微特电机[J].2002(4)37-38.[7]吴红星,张千帆,寇宝泉.电机控制集成电路的选用第六讲无刷直流电动机控制芯片MC33033的选用[J].微电机,1999(6)42-43.Auto Door Control System Based on CPLD AND MC 33033GAO Yan Li,CHEN Zhong bin(School of Electronic and Electrical Eng.,East China Jiaotong University,Nanchang 330013,China)Abstract:Auto door control syste m based on CPLD and contributed motor controller MC33033is present.CPLD is contri bution to control the operation state of auto door and MC33033is contribution to control the run for ward or reverse and regulate the speed independently.This control system has advantage of simplicity,dependability and lower c ost.The ex perimental result is provided in this paper.Key words:auto door;VHDL;motor controller;forward or reverse128华东交通大学学报 2006年。
直流无刷电机工作原理与控制方法用A TE33035(替代MC33035)可以很方便的控制直流无刷电机。
直流无刷电机既具有交流电机的结构简单、运行可靠、维护方便等优点,又具备直流电机的运行效率高、无励磁损耗以及调速性能好等优点。
由于传统的直流电机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等缺点。
随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM 等相继出现,以及高性能永磁材料的问世,均为直流无刷电机的广泛应用奠定了坚实的基础。
直流无刷永磁电机的基本组成:主要由电机本体、位置传感器和电子开关电路三部分组成。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(p=2,4,…)组成。
图1. 三相两极直流无刷电机组成三相定子绕组分别连接到电子开关线路中相应的功率开关器件,A、B、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器跟踪与电机转子转轴相连接的部件。
此处采用光电器件作为位置传感器,以三只功率晶体管V1、V2和V3构成功率逻辑单元。
三只光电器件VP1、VP2和VP3的安装位置各相差120度,均匀分布在电动机一端。
借助安装在电机轴上的旋转遮光板的作用,使从光源射来的光线依次照射在各个光电器件上,并依照某一光电器件是否被照射到光线来判断转子磁极的位置。
常见的位置传感器有以下几种:电磁式位置传感器、光电式位置传感器、磁敏式位置接近传感器。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
图2. 各相绕组的导通示意图三相永磁无刷直流电机转子位置传感器输出信号VP1、VP2、VP3在每360 电角度内给出了6个代码,按其顺序排列,6个代码是101、100、110、010、011、001。
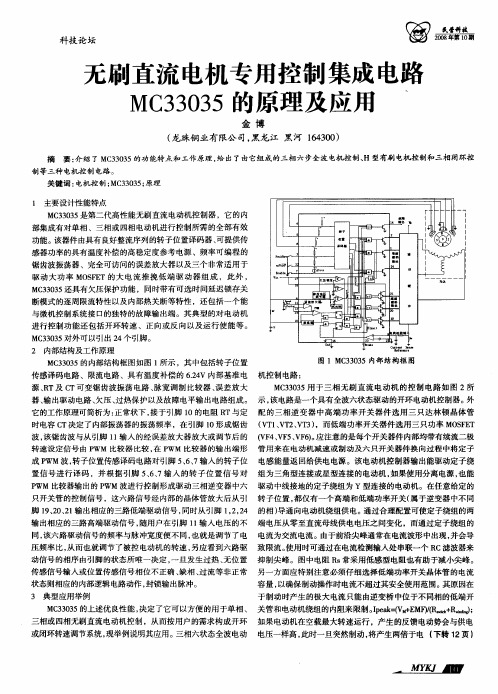
无刷直流电机控制器MC33035的原理及应用无刷直流电机控制器MC33035的原理及应用摘要:MC33035是美国安森美公司开发的高性能第二代单元无刷直流电机控制器,它包含开环三相或四相电机控制所需的全部有效功能。
该器件由具有良好整流序列的转子位置译码器、可提供传感器功率的温度补偿参考、频率可编程的锯齿波振荡器、完全可访问的误差放大器以及三个非常适用于驱动大功率MOSFET的大电流推挽底部驱动器组成,因而是一种功能齐全的电机控制器。
文中介绍了MC33035的特点功能和工作原理,给出了由它组成的三相六步全波电机控制和H型电机有刷控制等两种电机控制电路。
关键词:无刷直流电机控制 MC330351 概述MC33035无刷直流电机控制器采用双极性模拟工艺制造,可在任何恶劣的工业环境条件下保证高品质和高稳定性。
该控制器内含可用于正确整流时序的转子位置译码器,以及可对传感器的温度进行补偿的参考电平,同时它还具有一个频率可编程的锯齿波振荡器、一个误差信号放大器、一个脉冲调制器比较器、三个集电极开路顶端驱动输出和三个非常适用于驱动功率场效应管(MOSFET)的大电流图腾柱式底部输出器。
此外,MC33035还有欠锁定功能,同时带有可选时间延迟锁存关断模式的逐周限流特性以及内部热关断等特性。
其典型的电机控制功能包括开环速度、正向或反向、以及运行使能等。
2 管脚排列及功能定义MC33035的管脚排列如图1所示,各引脚功能定义见表1。
表1 MC33035的管脚功能定义定管脚编号符号功能定义1,2,24 BT,AT,CT 三个集电极开路顶端驱动输出,用于驱动外部上端功率开关晶体管3 Fwd/Rev 正向/反向输入,用于改变电机转向4,5,6 SA,SB,SC 三个传感器输入,用于控制整流序列7 Ooutput Enable 输出使能,高电平有效。
该脚为高电平时,可使电机动8 Reference Output 此输出为振荡器定时电容CT提供充电电流,并为误差放大器提供参考电压,也可以向传感器提供电源表2 三相六步换向器真值表输入60度SA SB SC 120度SA SB SC 正向/反向使能电流检测顶部驱协AT BT CT 底部驱动AB BB CB1 0 0 1 0 0 1 1 01 1 0 1 1 0 1 1 01 1 1 0 1 0 1 1 00 1 1 0 1 1 1 1 00 0 1 0 0 1 1 1 00 0 0 1 0 1 1 1 01 0 0 1 0 0 0 1 01 1 0 1 1 0 0 1 01 1 1 0 1 0 0 1 00 1 1 0 1 1 0 1 00 0 1 0 0 1 0 1 00 0 0 1 0 1 0 1 01 0 1 1 1 1 X X X0 1 0 0 0 0 X X XV V V V V V X 0 X V V V V V V X 1 X 表中,V表示六个有效传感器或驱动组合中的一个,X表示无关;输入逻辑0定义为小于85mV,逻辑1为于115mV3 工作原理MC33035的内部结构框图如图2所示。
毕业设计(论文)题目:无刷电机驱动的电动自行车的控制系统设计专业:数控技术班级:学号:姓名:指导老师:摘要近年来,燃油交通工具因尾气排放问题已造成城市空气的严重污染。
于是发展绿色交通工具已经成为一个重要的课题。
考虑到我国的国情,发展电动自行车具有重要的环保意义。
随着电机技术及功率器件性能的不断提高,电动自行车的控制器发展迅速。
本文设计采用无刷直流电机专用控制芯片MC33033为控制芯片,以功率器件MOSFET为开关器件驱动电机,实现对无刷直流电机的控制。
设计出了电路原理图、印制板电路图和电路板实物的3维效果图。
关键词:无刷直流电机MC33033 原理图印制板电路图AbstractIn recent years, transportation fuel emission problem has been caused by urban air pollution levels. So the development of green transport has become an important issue. Taking into account China's national conditions, development of electric bicycles has important environmental significance. With the motor technology and continuously improve the performance of power devices, the rapid development of electric bicycle controller. This design uses a brushless DC motor for the control of dedicated control chip MC33033 chip, in order to power MOSFET devices as the switching device drive motor, to achieve control of the electric bike. Design a circuit diagram, PCB circuit diagrams and circuit board real 3-D renderings.Keywords:brushless DC motor MC33033 Schematic PCB circuit目录摘要 (I)ABSTRACT (II)第1章引言 (5)1.1课题的研究背景及发展状况 (5)1.1.1当今社会的能源问题 (5)1.1.2无刷直流电机的发展过程 (5)1.1.2无刷直流电机的特点 (6)1.2电动自行车的组成部分 (7)1.3课题研究的内容 (8)第2章电动自行车的主要技术 (9)2.1电动自行车的基本性能 (9)2.2电动自行车的主要技术参数 (10)2.2.1整车主要技术参数 (10)2.2.2蓄电池主要技术参数 (10)2.2.3电动机主要技术参数 (11)2.2.4控制器主要技术参数 (11)2.3电动自行车的电机控制技术 (12)2.4无刷直流电机的结构与原理 (12)2.5无刷直流电机的调速方法 (14)2.6无刷直流电机的位置检测 (15)第3章系统元器件选择 (17)3.1控制芯片MC33033 (17)3.2功率器件MOSFET (20)3.3无刷电机驱动芯片IR2103 (22)3.4闭环无刷电机适配器MC33039 (23)3.5蓄电池的选择 (24)第4章系统电路设计 (27)4.1普通无刷电动机控制电路 (27)4.2主电路设计 (28)4.2.1电源电路设计 (28)4.2.2驱动电路设计 (28)4.2.3刹车电路设计 (29)4.2.4调速电路设计 (30)4.2.5钥匙开关设计 (31)4.2.6整体电路图 (32)第5章印制电路板设计 (34)5.1确定元件封装 (34)5.2生成网络表 (35)5.3印制电路板环境设置 (35)5.4绘制PCB板 (36)结论 (38)致谢 (39)参考文献 (40)附录 1 (41)附录 2 (43)附录 3 (45)第1章引言1.1课题的研究背景及发展状况1.1.1当今社会的能源问题能源是人类社会存在和发展的物质基础。