FANUC&福尼斯以太网通讯
- 格式:pdf
- 大小:3.44 MB
- 文档页数:16
FANUC键盘参数一、概述FANUC键盘是数控机床控制系统中常见的输入设备,用于输入加工程序、参数设置、手动操作等。
本文将详细介绍FANUC键盘的参数,以便用户更好地了解和使用。
二、键盘布局FANUC键盘通常采用标准QWERTY布局,包括字母、数字和常用符号键。
此外,根据不同型号,可能还会配备方向键、功能键和编辑键等。
三、主要参数1.输入电压:一般为DC 5V或9V,具体电压值根据不同型号而定。
2.接口类型:常见的接口类型包括USB、RS232和PS/2等,具体接口类型根据不同型号而定。
3.键位数量:根据型号不同,FANUC键盘的键位数量也有所不同,常见的有87键、101键和104键等。
4.防水设计:部分型号的FANUC键盘具备防水功能,能够承受一定程度的液体溅射。
5.可编程按键:部分高端型号支持可编程按键,用户可以根据个人习惯自定义按键功能。
6.人体工程学设计:为了提高操作者的舒适度,部分型号的FANUC键盘采用人体工程学设计,如倾斜角度、键帽形状等。
7.按键力度:按键力度是指按键下按所需的力度,一般分为轻触式和机械式两种。
轻触式按键力度较小,手感轻盈;机械式按键力度较大,手感较重。
8.按键寿命:按键寿命是指键盘中每个按键能够承受的按压次数。
一般来说,机械式按键的寿命比轻触式按键更长。
四、使用注意事项1.在使用过程中,应保持键盘干燥,避免液体溅射。
2.避免用力过度或长时间按压同一键位,以免缩短键盘寿命。
3.若发现键盘出现故障或异常,应及时联系专业人员进行维修或更换。

FANUC系统参数和调整资料FANUC系统参数是机床控制系统的一部分,它可以帮助配置和调整机床的各种参数,以满足特定的生产需求和操作要求。
系统参数涵盖了各个方面,包括机床的速度、精度、工具刀具的使用和切削参数,以及其他一些功能和操作上的设定。
首先,FANUC系统参数中最重要的一部分是速度参数。
在机床的加工过程中,需要设置合适的速度来确保加工效率和加工质量。
这些参数包括进给速率、快速移动速度、主轴旋转速度等。
进给速率决定了机床在工件上加工时进给的速度,快速移动速度决定了机床在空移或者换刀时的移动速度,主轴旋转速度决定了机床切削时刀具的旋转速度。
其次,精度参数也是非常重要的一部分。
精度参数用于定义机床的精确度和重复性。
例如,位置精度参数用于确定机床在加工过程中的坐标定位精度。
角度精度参数用于确定机床在加工过程中的角度定位精度。
这些参数可以根据特定的生产需求进行调整,以便确保机床在加工过程中达到所要求的精度。
此外,FANUC系统参数中还包括工具刀具的使用和切削参数。
这些参数用于配置工具刀具的类型、尺寸和使用方式。
例如,刀具参数用于定义刀具的长度、直径和刃数。
切削参数用于定义刀具的进给速率、切削深度和切削速度。
通过调整这些参数,可以确保机床在加工过程中使用合适的刀具,并按照所要求的方式进行切削。
最后,FANUC系统参数中还包括其他一些功能和操作上的设定。
例如,可以通过参数设置实现机床的自动换刀功能。
还可以设置机床的报警和故障监测功能,以及机床的联机通信功能。
这些参数可以根据具体的生产需求进行调整,以满足生产工艺和操作要求。
综上所述,FANUC系统参数是机床控制系统中非常重要的一部分。
它可以帮助配置和调整机床的各种参数,以满足特定的生产需求和操作要求。
通过合理地设置这些参数,可以提高机床的加工效率和加工质量,同时确保机床的稳定性和安全性。
因此,对于机床操作人员和维护人员来说,了解和掌握FANUC系统参数的相关知识非常重要。

FANUC系统参数说明FANUC是一家全球领先的工业自动化解决方案供应商,拥有广泛的机器人、控制系统、CNC系统和工厂自动化技术。
在FANUC系统中,参数设置是非常重要的,它们决定了系统的运行方式、精度和性能。
以下是关于FANUC系统参数的详细说明:1.系统参数的作用:FANUC系统参数是用于设置控制系统中的各种参数,以确保机器的正常运行和满足具体的应用需求。
这些参数包括示教模式、过程参数、插补参数、电机参数等,通过调整这些参数,可以实现不同种类和复杂度的操作和加工。
2.示例参数说明:a.示教模式参数:示教模式参数用于设置控制系统的示教模式。
示教模式包括绝对坐标、相对坐标、增量坐标等不同模式。
使用不同的示教模式,可以实现不同方式的编程和操作。
b.过程参数:过程参数用于设置控制系统的运动过程参数,如加速度、减速度、最大速度等。
通过调整过程参数,可以实现机器在运动时的加速度和运动速度控制,以满足不同的加工需求。
c.插补参数:插补参数用于设置控制系统的插补方式和插补精度。
插补是指多个轴之间的相互关联运动,通过调整插补参数,可以实现不同程度的插补精度,以满足不同的加工要求。
d.电机参数:电机参数用于设置控制系统的电机参数,如电机类型、转速范围、电机参数等。
通过调整电机参数,可以实现不同类型和规格的电机的控制和运动控制。
3.参数设置方法:FANUC系统的参数设置通常通过控制面板上的菜单和相关指令来完成。
用户可以通过菜单界面来浏览、修改和保存参数设置,也可以通过指令和命令来直接修改参数值。
根据具体的参数类型和设置需求,用户可以选择不同的设置方法。
4.参数保存和加载:一旦参数设置完成,用户可以选择将参数保存到控制系统中的非易失性存储器中。
这样,在重启或重新加载控制系统时,之前保存的参数将被加载到系统中,以确保参数的一致性和稳定性。
5.参数备份和恢复:为了保证参数的安全和可靠性,用户可以定期对参数进行备份。
备份参数可以实现在系统崩溃、数据丢失或系统维修时能够迅速恢复参数。
FANUC系统常见报警中文对照及解决方法1.AL-01:伺服报警尘埃这个报警表示伺服电机遇到了尘埃问题。
解决方法是清洁伺服电机,并确保其周围环境清洁。
2.AL-02:伺服报警过载这个报警表示伺服电机遇到过载问题。
解决方法是检查伺服电机和相关设备的负载情况,确保其在正常范围内。
3.AL-03:伺服报警过温这个报警表示伺服电机遇到过温问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
4.AL-04:伺服报警驱动断开这个报警表示伺服电机的驱动断开。
解决方法是检查伺服电机的连接线路是否正常,确保电缆连接牢固。
5.AL-05:伺服报警电源断开这个报警表示伺服电机的电源断开。
解决方法是检查伺服电机的电源线路是否正常,确保电源连接牢固。
6.AL-06:伺服报警过流这个报警表示伺服电机遇到过流问题。
解决方法是检查伺服电机和相关设备的电流情况,确保其在正常范围内。
7.AL-07:伺服报警过压这个报警表示伺服电机遇到过压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
8.AL-08:伺服报警欠压这个报警表示伺服电机遇到欠压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
9.AL-09:伺服报警过热这个报警表示伺服电机遇到过热问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
10.AL-10:伺服报警驱动电流异常这个报警表示伺服电机驱动电流异常。
解决方法是检查伺服电机的驱动器和电缆连接是否正常,并确保电缆连接牢固。
fanuc常用参数FANUC是全球最大的机器人制造商之一,其广泛的工业机器人和CNC系统在全球各领域被广泛应用。
在使用FANUC的机器人和CNC系统时,常涉及到一些重要的参数,这些参数对于机器人的正常运行以及生产过程中的安全和效率都发挥着至关重要的作用。
以下是FANUC机器人常用的参数及其相关参考内容:1. S型加减速度参数:S型加减速度参数对机器人的运动控制非常重要。
在使用机器人时,S型加速度参数的值决定了机器人运动的快慢和平滑程度。
加速度参数过高或过低都会影响机器人的正常运行。
若加速度参数过高,机器人可能会失去控制,因而应该根据实际情况设定合适的加速度参数。
2. 位置误差参数:机器人在进行运动时,如果位置控制不准确,会导致产品生产质量下降甚至出现不良品。
FANUC机器人使用位置误差参数来确定机器人位移量与位置设定值的差异。
通过调整位置误差参数,可以保证机器人的位置控制精度,提高产品的生产质量。
3. 坐标系参数:机器人的动作控制是基于坐标系来进行的。
坐标系参数确定了机器人坐标系相对于世界坐标系的位置和方向。
我们可以通过修改坐标系参数来实现机器人的坐标变换,实现机器人的多姿态操作。
4. 工具坐标系参数:工具坐标系是机器人的工具、末端执行器和传感器的坐标系。
工具坐标系参数与末端执行器的姿态和位置有关,并且可以影响到机器人的定位和运动控制。
当机器人进行复杂的运动时,我们可以通过设置工具坐标系参数来提高机器人运动的精度。
5. 坐标系旋转参数:在一些特殊的情况下,我们可能需要旋转整个机器人坐标系,以适应不同的生产需求。
坐标系旋转参数允许我们通过旋转机器人坐标系来调整其朝向。
通过修改坐标系旋转参数,我们可以改变机器人的运行方向、朝向和位置。
除了上述常见参数,FANUC机器人还有许多其他参数。
这些参数通常会随着使用的机器人模型和应用场景而有所不同,因此在使用机器人时,需要根据实际情况进行设定和调整。
不过,无论使用哪种参数,我们都应该注意安全性和操作精确性,以保证机器人能够正常运行并保持高效的生产效率。
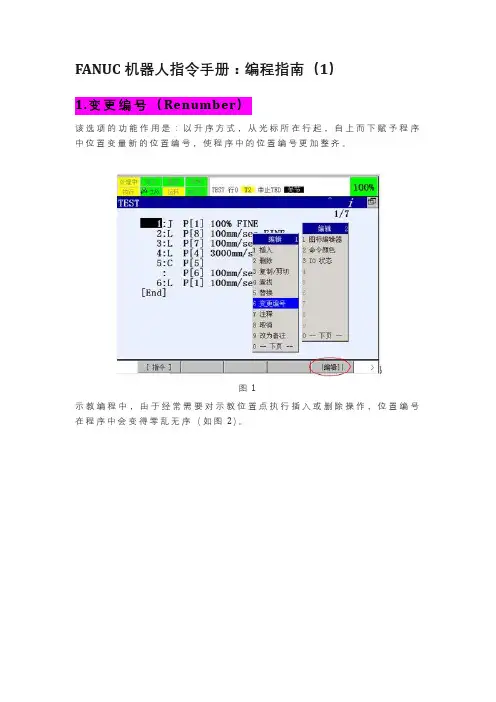
FANUC机器人指令手册:编程指南(1)1.变更编号(Renumber)该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。
图1示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
图2通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
图3注意:1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。
2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤:将光标移至程序首行后①选择F5编辑命令;②选择“变更编号”选项;③选择F4“是”(如图4、图5所示)。
图4备注:由于行1与行6中位置变量相同,都为P[1]。
所以,变更编号后两者编号保持一致。
图52.取消(Undo)该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。
注意:该功能只能撤销上一步操作,不能撤销多次操作。
下文以行删除为例对该功能进行说明。
原程序如图6所示:图6在原程序中删除1-3行后,程序如图7所示:图7通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。
具体操作步骤:①选择F5编辑命令;②选择“取消”;③选择F4“是”(如图8、图9所示)。
图8图9取消后,程序如图10所示。
图103.改为备注(Remark)该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。
原程序如图11,图11该程序对应机器人轨迹如图12,图12将原程序2-4行改为备注后,在行的开头会显示“//”。
改为备注的指令在程序运行中相当于被屏蔽,不会被执行。
将2-4行改为备注后,程序如图13,图13改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
图14具体操作步骤:①将光标移至需要改为备注的行号位置;②选择F5编辑命令;③选择“改为备注”选项(如图15);④根据提示,下移光标选中目标对象;⑤选择F4“改为备注”(如图16)。

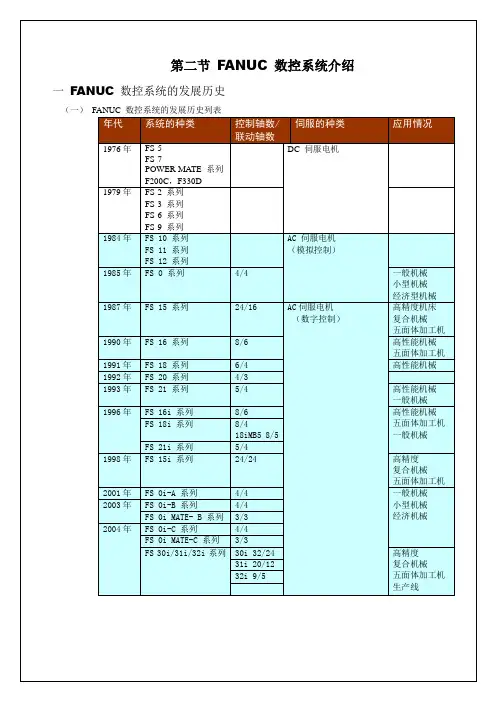
(二) 常见FANUC 数控系统0-C/0-D 系列1985年开发,系统的可靠性很高,使得其成为世界畅销的CNC,该系统2004年9月停产,共生产了35万台。
至今有很多该系统还在使用中。
FANUC 0-C/0-D 系列16/18/21 系列1990年-1993年间开发。
FANUC 16/18/21 系列16i/18i/21i 系列1996年开发,该系统凝聚了FANUC过去CNC开发的技术精华,广泛应用于车床,加工中心,磨床等各类机床。
FANUC 16i/18i/21i系列FANUC 0i-AFANUC 0i-BFANUC 0i mate-B0i-A 系列2001年开发,是具有高可靠性,高性能价格比的CNC 。
0i-B/0i mate-B 系列2003年开发,是具有高可靠性,高性能价格比的CNC ,和0i-A 相比,0i-B/0i mate-B 采用了FSSB (串行伺服总线)代替了PWM 指令电缆。
0i-C/0i mate-C 系列2004年开发,是具有高可靠性,高性能价格比的CNC,和0i-B/0imate-B相比,其特点是CNC与液晶显示器构成一体,便于设定和调试。
FANUC 0i-C30i/31i/32i 系列2003年开发,适合控制5轴加工机床、复合加工机床、多路径车床等尖端技术机床的纳米级CNC。
通过采用高性能处理器和可确保高速的CNC内部总线,使得最多可控制10个路径和40个轴。
同时配备了15英寸大型液晶显示器,具有出色的操作性能。
通过CNC,伺服,检测器可进行纳米级单位的控制,并可实现高速,高质量的模具加工。
FANUC 30i/31i/32i 系列二FANUC 数控系统的共同结构特点下图是典型的FANUC 数控系统的构成框图,请先参考,后面内容还有关于构成框图的进一步介绍。
CNC内部模块FANUC 数控系统应用到机床上的情况:三查看系统的类型主要有两种方法:(1) 通过显示器上面的黄色条形标牌如下图FANUC SERIES 18i-MB特殊情况:有些系统上的黄色条形标牌写不是FANUC系统的类型,而是机床的名称,这样的标牌是FANUC公司专门给某些机床厂家做的。
数控加工中心FANUCOi系数控加工中心FANUCOi系是一种高精度、高效率的数控机床系统,它采用了FANUC公司先进的数控技术,能够精确控制机床的所有运动和加工过程,使得加工零件的精度和效率得到大幅提升。
本文将从FANUCOi系的特点、应用场景、技术优势以及未来发展等方面进行详细介绍。
一、FANUCOi系的特点数控加工中心FANUCOi系具有以下特点:1.高精度:FANUCOi系采用了先进的数字控制技术,能够实现高精度加工,对于工件的直径、深度、等特征精度可以精确控制。
2.高效率:FANUCOi系的加工速度和切削力可以自动调节,加工效率比传统的机床系统要高出很多。
3.灵活性:FANUCOi系可以通过更换工具,在短时间内完成多种不同的加工任务,大大提高了生产效率。
4.操作简单:FANUCOi系的操作界面简单直观,只需轻松的点击几个按钮就可以完成加工零件的设置,操作人员无需过多的数控技术知识就可以顺利掌握。
二、FANUCOi系的应用场景FANUCOi系广泛应用于航空、汽车、精密机械、五金制造、医疗设备、电力设备等领域,尤其在航空航天、汽车制造等大型零部件的加工中有着广泛应用。
航空航天领域:FANUCOi系可以实现高效、精度的加工,满足各种高强度、高精度的航空零件的加工需求,如飞机发动机轴承座、发动机叶片和涡轮盘等。
汽车领域:FANUCOi系可以实现全自动化加工,适用于多种汽车零件的加工,如汽车底盘、发动机缸体、曲轴、齿轮等。
精密机械领域:FANUCOi系可以实现高精度、高效率的加工,适用于各种精密零件的生产制造,如仪器仪表、光学设备、半导体等。
三、FANUCOi系的技术优势FANUCOi系采用了众多先进的数字控制技术,具有以下技术优势:1.高速加工技术:FANUCOi系采用高速刀具,可以加快零件的加工速度,从而提高生产效率。
2.自适应控制技术:FANUCOi系可以按照加工过程中的实际情况来调整加工参数,使得加工过程更加稳定。
FANUC常用参数1.报警处理参数(ALM)这些参数用于设置系统报警的处理方式,例如报警终止的条件、报警信息的显示等。
2.坐标系参数(G54~G59)这些参数用于设置工件坐标系的原点和轴向移动的距离。
3.速度参数(F、S、G96~G97)这些参数用于设置切削进给速度、切削用途的材料速度等。
4.转速参数(M3、M4、M5)这些参数用于设置主轴的转速和方向。
5.工具偏移参数(G43、G44、G48)这些参数用于设置和调整工具补偿的位置。
6.急停参数(M0、M1)这些参数用于设置急停的条件和执行急停操作。
7.程序调用参数(M98、M99)这些参数用于调用和执行子程序。
8.伺服参数(SV、SET)这些参数用于设置伺服轴的速度和位置。
9.插补误差参数(G96、G97、G98、G99)这些参数用于设置插补误差补偿的方式和值。
10.自动换刀参数(T、M6)这些参数用于自动换刀操作,设置刀具编号和刀具长度补正值。
11.平台控制参数(G160~G169)这些参数用于配置和控制机床上的附加设备,例如自动上下料机等。
12.快速移动参数(G00)这些参数用于设置快速移动的速度和方式。
13.进给速度参数(G94、G95)这些参数用于设置进给速度单位和进给速度值。
14.反向间隙参数(G41、G42)这些参数用于设置反向间隙的值和位置。
15.加工参数(G01、G02、G03)这些参数用于设置不同的加工方式,例如直线插补、圆弧插补等。
以上是一些常用的FANUC参数示例,不同的机床和加工过程可能会有所差异。
在操作FANUC数控系统时,正确设置和调整这些参数是非常重要的,可以确保机床正常运行,并且获得高质量的加工结果。
FANUC数控系统的特点1.稳定性高:FANUC数控系统采用最新的数字控制技术,具有高度集成的硬件和软件系统,保证了系统的稳定性和可靠性。
系统的硬件经过精密的加工和装配,不仅具有高度的精度和稳定性,而且具有优异的抗干扰和抗干扰能力,能够在恶劣的环境条件下正常工作。
2.高速高精度:FANUC数控系统的控制算法和运动控制模块经过多年的研发和实践,并获得了国际认证。
系统的高速高精度控制技术可以保证机床在高速运动过程中保持高精度的加工质量,提高工作效率。
3.灵活性强:FANUC数控系统具有灵活的编程方式和参数设置,可以满足不同工作需求的定制化要求。
系统支持多种编程语言,如G代码、M代码等,操作界面友好易学,操作简便。
同时,系统提供了丰富的功能模块和附加设备,可以满足不同工艺要求和加工需求。
4.响应速度快:FANUC数控系统采用了先进的实时控制技术和数据传输技术,可以在微秒级别内实时响应加工指令和传感器反馈信号。
系统的响应速度远远高于传统的数控系统,能够实现实时控制和监控,提高机床的工作效率和生产效率。
5.可靠性高:FANUC数控系统经过严格的质量控制和严格的测试验证,其设计和制造符合国际标准和行业标准的要求。
系统的各个部件和模块都经过了严格的寿命测试和可靠性测试,能够在恶劣的工作环境条件下长时间稳定运行。
6.兼容性好:FANUC数控系统具有良好的兼容性,可以与其他厂家的设备和系统无缝集成。
系统支持多种通信接口和通信协议,可以实现与其他机床、自动化设备和工业设备的数据交换和控制。
7.易维护性:FANUC数控系统具有良好的可维护性和可升级性。
系统的硬件和软件模块具有独立的设计和模块化的结构,可以通过更换部件或升级软件来进行维护和升级,方便快捷。
总之,FANUC数控系统具有稳定性高、高速高精度、灵活性强、响应速度快、可靠性高、兼容性好和易维护性等特点,是工业制造中广泛应用的数控系统之一,并成功应用于机床、自动化设备和工业机器人等领域。
FANUC系统参数资料FANUC系统参数是指FANUC数控机床控制系统中的一种关键设置参数。
在FANUC系统中,有大量的系统参数可以进行配置和调整。
这些参数一般可以通过特定的输入方式进行修改,如MDI(手动数据输入)方式或专用的参数设置界面。
FANUC系统参数主要分为基本参数和扩展参数两个部分。
基本参数是FANUC系统中最基础、最重要的一类参数,它们对机床的基本运动、位置、速度等进行定义和配置。
扩展参数是在基本参数的基础上,提供了一些更加细微和专业的功能,如分段加工控制、插补算法、轴线性补偿等。
在FANUC系统参数中,常见的基本参数包括:1.通用参数:包括机床型号、进给轴个数、主轴个数等基本信息。
2.机床坐标系参数:用于定义机床坐标系的原点、旋转中心点等。
3.进给轴参数:用于配置进给轴的运动速度、加减速度、保持速度等。
4.主轴参数:用于配置主轴的转速范围、最大功率、刹车开关等。
5.轴线性补偿参数:用于配置轴线性补偿的相关信息,如基准坐标、最大补偿量等。
扩展参数中的常见配置包括:1.插补控制参数:用于配置插补控制算法的精度、速度、加减速度等相关信息。
2.分段加工控制参数:用于配置分段加工控制的相关信息,如每段时间、每段距离等。
3.坐标转换参数:用于配置坐标系转换、切换的相关信息,如工件坐标系、手动坐标系等。
4.工具偏置参数:用于配置工具偏置的相关信息,如刀长补偿、半径补偿等。
5.外部输入/输出参数:用于配置输入和输出信号的规范、通道、配置信息等。
FANUC系统参数的修改和配置一般需要特定的权限和操作方法。
在修改参数时,需要仔细阅读相关的文档和操作手册,确保了解参数的含义和影响范围。
同时,在修改之前,最好备份原有的参数设置,以防止错误操作导致机床无法正常运行。
总之,FANUC系统参数是数控机床控制系统中非常重要的配置信息。
通过对参数的调整和配置,可以实现机床的不同运动、加工方式和功能需求。
因此,熟悉并了解FANUC系统参数资料是每个数控操作和编程人员都应该掌握的基本知识。
FANUC参数介绍FANUC是日本一家知名的工业机器人和数控系统制造商,其数控系统被广泛应用于各种机械加工领域。
作为数控系统的核心部分,FANUC参数起着至关重要的作用。
本文将介绍FANUC参数的作用、应用和相关注意事项。
FANUC参数是一组用于配置和控制机器的变量,在数控系统中起着重要的作用。
通过修改参数的值,可以调整机器的运行速度、控制方式、轴的移动范围等。
因此,了解和熟练掌握FANUC参数对于操作和调试机床非常重要。
首先,我们来看一下FANUC参数的类型。
FANUC参数分为系统参数和用户参数两种类型。
系统参数是由FANUC进行设定的,用于配置数控系统的一些基本参数,如输入/输出口的配置、通信设置、系统功能等。
用户参数是由机床操作人员进行设定的,用于根据具体的加工需求进行调整,如进给倍率、快速移动速度、加工尺寸补偿等。
在实际应用中,我们需要根据具体的机床类型和加工要求来设置FANUC参数。
首先,我们需要了解参数的含义和作用。
在FANUC参数手册中,会详细介绍每个参数的功能和取值范围。
例如,进给倍率参数用于控制机床的进给速度,通过调整进给倍率可以实现快速移动和精细加工之间的平衡。
另外,还有一些重要的参数如坐标系设定、刀具半径补偿、加工样式选择等,这些参数的设定直接影响到机床的加工精度和效率。
在设置FANUC参数时,需要注意一些细节。
首先,修改参数前一定要备份原始参数,以防止误操作导致的系统故障。
其次,只有经过培训和了解机床加工原理的操作人员才能进行参数设置,以确保设置的参数合理有效。
此外,修改参数后需要进行验证和调试,确保机床的性能和加工质量符合要求。
除了基本参数之外,FANUC还提供了一些高级参数和专用参数,用于扩展和优化机床的功能。
例如,切削参数和进给参数可以根据具体的切削条件来调整,以提高切削效率和减少加工时间。
另外,还有一些专门用于控制机床行为的参数,如X轴伺服误差补偿、轴的相对运动模式等。
FANUC数控系统的工作原理硬件部分:1.伺服驱动器:负责接收来自数控系统的指令并将其转化为电气信号,控制电机的运动。
2.电机:根据伺服驱动器的指令进行相应的转动,控制机床的各个运动轴。
3.传感器:用于收集机床各个部位的状态信息,如工件位置、速度、加速度等,并将其转化为电信号输入到数控系统中。
4.编码器:安装在机床运动轴上,用于实时监测轴的位置,并将其反馈给数控系统。
5.运动控制卡:负责控制机床的各个轴的运动,将指令转化为电信号送给伺服驱动器和电机。
软件部分:1.操作系统:数控系统的操作系统负责管理和控制机床的运行。
它具备实时性和可靠性,能够及时响应指令,并对机床进行状态监测和报警处理。
2.应用程序:FANUC数控系统提供了丰富的应用程序,包括数控编程、运动控制、辅助功能等。
操作员可以通过编写和调用这些应用程序,实现对机床的自动化加工控制。
1.编程和设置:操作员首先在数控系统的操作界面上进行编程和设置,包括输入加工程序、设定工件坐标系、选择刀具等。
2.指令处理:数控系统将操作员输入的编程指令进行解析和处理,生成对应的运动控制指令。
3.运动控制:数控系统根据运动控制指令,控制伺服驱动器和电机实现对机床各个轴的精确运动控制,并根据编码器的反馈信息进行闭环控制。
4.编码器反馈:编码器实时监测机床运动轴的位置,并将其反馈给数控系统,以便进行误差修正和调整。
5.位置控制:数控系统根据编码器的反馈信息,对机床的位置进行控制,保证工件的位置精度。
6.状态监测:数控系统通过传感器实时监测机床各个部位的状态,如工件位置、速度、加速度等,以便对机床进行状态监测和报警处理。
总之,FANUC数控系统通过硬件和软件的配合,实现对机床运动轴的精确控制和工件加工过程的自动化控制,提高了加工精度和生产效率。
FANUC机器人与福尼斯焊 机以太网通讯
硬件需求
1、B柜体使用普通网线即可 2、Mate柜体需要使用绞线接 2 M t 柜体需要使用绞线接 法,即电脑和电脑连接的网线。
3、福尼斯焊机必须配置以太 网卡
以太网通讯
一、软硬件安装
福尼斯焊接与机器人通讯网线只能插在 PORT2接口,确保已经安装软件 R540“EthernetIP I/O scan”和 R653 Fronius Weld Eq Lib R653“Fronius Weld Eq Lib ”
焊机通讯设置(1)
1、开机进入控制启动,将 1 开机进入控制启动,将 Manufacturer选择为General Purpose,再进行冷启动,对焊机 信号进行清零。
焊机通讯设置(2)
2、冷启动后,再进行一次控制启动,将Manufacturer选择为 General Purpose,将Model选择为TS/TPS with Enet。
同时,将下 面Multi-process改为ENABLED
焊机通讯设置(3)
3、选择完后,系统 3 选择完后 系统 会对焊机信号进行分 配,首先会出现一对 话框询问焊机信号的 大小,是否选择296 pts?一般都选YES。
随后会出现对话框 询问是自动分配信 号还是自己指定信 号开始点, 般选 号开始点 一般选 择NO让其自动分配。
分配完后可进行冷 启动。
焊机通讯设置(4)
4、福尼斯网线通讯和DeviceNet通讯一样, 最后需要对两个信号进行置反。
值得注意 的是,机器人数字I/O默认只显示512个, 如果焊机信号自动分配在DI/O 512以后, 如 焊 信 自动 在 后 会导致看不到焊机信号而无法修改信号。
解决方法如下:在控制启动下按MENU键, 按0进入菜单第二页,选择1、PROGRAM 按0进入菜单第二页 选择1 PROGRAM SETUP
焊机通讯设置(5)
5、进入Program Limits页 面后,修改第8条 Num.Dig.ports可修改数字 Num Dig ports可修改数字 I/O的显示数量,比如修改 为1024。
修改后冷启动,可 看到信号显示数量已改为 1024
焊机通讯设置(6)
6、首先设置机器人IP。
按 Menu-Setup-Host Com的顺序进 入Host页面,如右图。
选择1 入Host页面 如右图 选择1 TCP/IP进入IP设置页面。
进入 后页面显示如下图
焊机通讯设置(7)
7、在IP页面按F3[port]键,切换至Port#2页面。
修改Port#2 IP addr为192.168.0.1.注意下一行Subnet Mask的前三位和相 同但最后位为0。
焊机通讯设置(8)
以太网页面如左图。
设置过焊机后 slot 2上的连接名称应变为Fronius 连 名称应变为 EQ1,如不是可手动更改为Fronius EQ1。
移动光标将TYP改为为SCN,Enable处 改为FALSE,此时状态应为OFFLINE。
焊机通讯设置(9)
9、随后,按F3 CONFIG可进入 焊机的IP设置,如右图。
此时 将Name/IP address处改为 将N /IP dd 处改为 192.168.0.2,此处即为焊机的 IP。
注意焊机IP前三位和机器 人相同而最后一位不同。
更改 人相同而最后一位不同 更改 完后,进行重启。
焊机通讯设置(10)
10、重启完成后,再次进入Etherent/Ip页面,移动光标将Slot 2处Enable 一栏改为TRUE,此时Status会变为RUNNING,证明机器人和焊机已连接成功。
焊机通讯设置(11)
11、最后,如同福尼斯其他通讯方式一样,对一些信号进行 更改。
按Menu ‐I/O ‐ Digital 进入数字I/O页面,按F3切换成DI, \ \ y 将其中的“PS\NOT\Ready ”和“Wirestick ”两个信号进行置 反,即将Polarity改为INVERSE。
至此,焊机通讯完成。
测试通讯是否正常
※ 保护气测试 Gas Start信号置ON
※ 送丝回丝测试 测试 Inch forward 送丝 Inch backward 回丝
谢
谢!
。