短跑运动控制的生物力学分析
- 格式:pdf
- 大小:719.93 KB
- 文档页数:7

短跑途中跑支撑摆动技术生物力学机制研究短跑是一项需要高度爆发力和协调性的运动项目,而在短跑过程中,跑支撑摆动技术是一项关键的技术手段。
本文将探讨短跑途中跑支撑摆动技术的生物力学机制。
跑支撑摆动技术是指在短跑过程中,通过合理的支撑和摆动动作,使身体能够更好地发挥爆发力和速度,提高奔跑效率。
这项技术主要通过运动员的腿部动作来实现。
我们来看支撑动作。
短跑中的支撑动作主要是指运动员在脚着地的瞬间,通过腿部肌肉的收缩产生反作用力,将身体向前推进。
支撑动作主要依靠腿部的肌腱和韧带来完成。
当脚着地时,腿部的肌肉会迅速收缩,产生向上的反作用力,将身体推离地面。
这一过程中,膝关节、踝关节和髋关节都发挥了重要的作用。
通过合理的支撑动作,运动员能够更好地利用地面反作用力,提高奔跑速度。
我们来看摆动动作。
短跑中的摆动动作主要是指运动员在奔跑过程中,通过腿部的摆动来保持身体的平衡和稳定。
摆动动作主要依靠大腿的前屈肌和屈肌来完成。
当一条腿着地时,另一条腿会迅速向前摆动,以保持身体的平衡。
在摆动过程中,大腿的前屈肌和屈肌需要协调收缩和松弛,使腿部能够有节奏地前后摆动。
通过合理的摆动动作,运动员能够提高奔跑的稳定性和节奏感。
总结起来,短跑途中跑支撑摆动技术的生物力学机制主要包括支撑动作和摆动动作两个方面。
通过合理的支撑动作,运动员能够更好地利用地面反作用力,提高奔跑速度;通过合理的摆动动作,运动员能够保持身体的平衡和稳定,提高奔跑的稳定性和节奏感。
这两个方面的技术手段的运用,能够有效地提高短跑运动员的爆发力和速度,提高奔跑效率。
需要注意的是,短跑途中跑支撑摆动技术的应用需要运动员具备一定的力量和柔韧性。
因此,运动员在训练中需要注重腿部力量的训练和柔韧性的培养。
同时,运动员还需要通过不断的实践和调整,找到适合自己的支撑摆动技术,以达到最佳的跑步效果。
短跑途中跑支撑摆动技术是一项关键的技术手段,通过合理的支撑和摆动动作,能够提高运动员的爆发力和速度,提高奔跑效率。
短跑项目途中跑技术生物力学探微作者:王志勇辛振概要:积极的扒地技术并不能产生短跑的动力,没有拉引的作用,但伸髋高摆扒地技术对短跑成绩的提高有重要的意义。
高摆后大腿主动下压,带动小腿积极地向后下方扒地以增大下肢各环节的角速度;腾空摆动过程中的伸髋可以加大大腿的摆动半径,从而有利于积极摆动充分发挥速度水平,合理的利用着地缓冲并积极摆动下肢,提高跑速。
快速蹬伸技术,快速蹬伸技术是现代短跑技术的主要特点之一蹬伸动作要注意蹬伸速度的迅速、蹬伸程度合理性和蹬伸方向更加有效性,适宜的蹬伸程度可以取得更快的蹬伸速度和更合理的蹬伸方向。
摆动腿积极快摆技术摆动腿快速有力、大幅度的前摆技术,更加完善了“摆动式”跑法,有效地促进身体迅速向前移动,加大了后蹬的力量和速度。
同时加快了摆动腿的速率,缩短跑动周期,提高了跑的频率。
前蹬支撑技术通过摆动腿积极下压,鞭打扒地动作和退让肌工作能力的训练,减小前蹬支撑时的阻力,缩短前蹬支撑时间,使重心移动的速度在前蹬支撑阶段的损耗减少,从而提高了跑的速度。
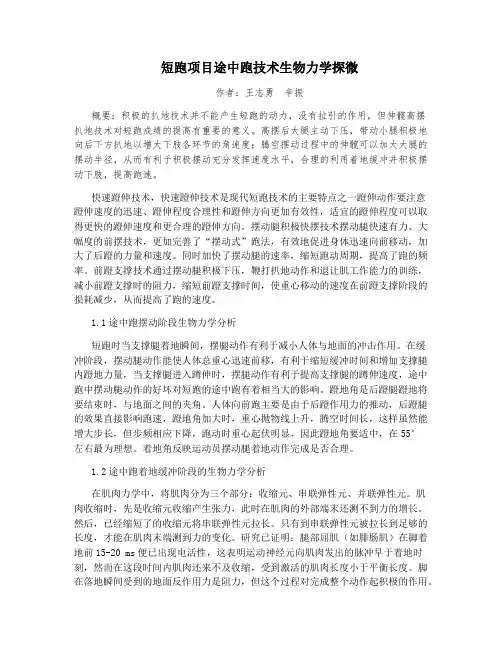
1.1途中跑摆动阶段生物力学分析短跑时当支撑腿着地瞬间,摆腿动作有利于减小人体与地面的冲击作用。
在缓冲阶段,摆动腿动作能使人体总重心迅速前移,有利于缩短缓冲时间和增加支撑腿内蹬地力量,当支撑腿进入蹲伸时,摆腿动作有利于提高支撑腿的蹲伸速度,途中跑中摆动腿动作的好坏对短跑的途中跑有着相当大的影响。
蹬地角是后蹬腿蹬地将要结束时,与地面之间的夹角。
人体向前跑主要是由于后蹬作用力的推动,后蹬腿的效果直接影响跑速,蹬地角加大时,重心抛物线上升,腾空时间长,这样虽然能增大步长,但步频相应下降,跑动时重心起伏明显,因此蹬地角要适中,在55°左右最为理想。
着地角反映运动员摆动腿着地动作完成是否合理。
1.2途中跑着地缓冲阶段的生物力学分析在肌肉力学中,将肌肉分为三个部分:收缩元、串联弹性元、并联弹性元。
肌肉收缩时,先是收缩元收缩产生张力,此时在肌肉的外部端末还测不到力的增长。

200米短跑速度训练生物化学特点分析一、能量系统200米短跑是一项高强度的运动,其能量主要通过无氧代谢供给。
在爆发力强、速度快的情况下,人体主要依靠肌肉中的磷酸肌酸、糖原和肌酸磷酸来提供能量,无氧糖酵解是主要的能量供应途径。
这种能量供应方式使得短跑运动员需要有较强的肌肉力量和高水平的无氧耐力。
二、乳酸阈值200米短跑的强度高,运动过程中会产生大量的乳酸。
随着短跑距离的增加,乳酸的积累也不断增加,这对于运动员的耐力和心肺功能提出了更高的要求。
运动员的乳酸阈值能力决定了他们能够在高乳酸浓度下持续运动的能力。
所以在200米短跑训练中,除了提高无氧能力外,还需注意增加乳酸阈值的训练,以提高运动员的耐力。
三、肌肉纤维类型200米短跑的速度要求很高,对于快速肌纤维的运动员有较高的适应性。
快速肌纤维能够迅速产生力量,并快速收缩,从而使肌肉能够更快地进行重复运动。
训练快速肌纤维的方法包括高强度冲击训练、爆发力训练和快速反应训练等。
这些训练方法可以帮助运动员提高神经肌肉反应速度和肌肉收缩速度,从而在200米短跑中表现出更好的爆发力和速度。
四、氧化代谢尽管200米短跑主要依靠无氧代谢,但氧化代谢也是不可忽视的。
在短跑运动的恢复过程中,通过氧化代谢可以迅速回复耗竭的肌糖原,并分解乳酸,减少肌肉酸痛。
所以在训练过程中,应该注重开展一些有氧训练,提高运动员的心肺功能和氧化代谢水平。
综上所述,200米短跑速度训练涉及到能量系统、乳酸阈值、肌肉纤维类型和氧化代谢等多个生物化学特点。
通过针对这些特点进行训练,可以帮助运动员提高爆发力和速度,并提高其为高强度、短时间运动提供能量的能力。
同时,也需注意在训练中恰当安排有氧训练,以提高运动员的心肺功能和恢复能力。
从运动生物力学角度分析百米跑-运动生物力学论文-体育论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——短跑是速度力量性项目,它的供能方式是无氧化供能,短跑不光要有速度,还要有很强的力量素质,另外灵敏性和协调性都要好。
除了身体素质,还要掌握正确的跑步技术,并不断改革创新。
因此,今天从运动生物力学的角度研究短跑的内在规律,研究百米跑的技术,对百米跑运动员具有指导意义。
1 百米跑技术分析的重要性2008年奥运会上,牙买加运动员博尔特打破百米世界纪录,以9秒69的成绩跑完百米。
通过视频我们可以看到,博尔特在最后快要冲刺的时候步伐放慢,科学家预测若博尔特保持原速度成绩则9秒61,若最后还能冲刺成绩能取得9秒55。
奥运会百米成绩从1912年的美国运动员利平科特的10秒6到2008年博尔特的9秒69,经历了大约100年的时间,但百米跑的成绩却仅仅提高了1秒。
图桑特说,到2027年,一半运动项目的纪录将到达人体极限,到2060年,百米赛跑的纪录将跨入以千分之一秒作为尺度的时代,马拉松速度将以减少百分之一秒为目标,而举重比赛的增重也精确到克了。
即便如此,每次微小的纪录突破也可能要间隔50年的时间。
怎么提高百米跑成绩,成为体育研究者的重中之重。
2 百米跑技术分析的生物力学理论基础2 . 1 转动惯量衡量物体(人体)转动惯性大小的物理量。
设物体(人体)转动部分由n个微小质量△mi构成,微小质量距转轴的距离分别为xi。
则转动惯量的定义式为:I=△mixi2。
影响转动惯量的因素:质量、转轴半径。
质量越小、半径越小,物体的转动惯量就越小,物体越容易转动。
2 . 2 转动定律刚体绕定轴转动时,转动惯量与角加速度的乘积等于作用于刚体的合外力矩要加大肢体摆动的角加速度,可以从两个方面考虑问题,一是减小摆动肢体的转动惯量;二是增大肌力矩。
2 .3 动量矩守恒定律人体在做相向动作时,通过人体内力作用使身体一部分转动时,则必引起身体另一部分沿反向转动,并且两部分的动量矩大小相等、方向相反,以保持人体动量矩矢量和为零。
短跑途中跑支撑摆动技术生物力学机制研究短跑是一项需要运动员快速奔跑的竞技项目,而在短跑的过程中,跑者的支撑摆动技术起着非常重要的作用。
支撑摆动技术是指运动员在短跑过程中,通过脚部的支撑和臂部的摆动来提高奔跑速度和稳定性的一种技术。
这一技术的生物力学机制是非常复杂的,需要从多个方面进行研究。
我们来研究支撑摆动技术对于短跑速度的影响。
短跑的速度主要由运动员的步频和步幅决定。
步频是指单位时间内运动员的步数,步幅是指每步的距离。
支撑摆动技术可以通过合理的支撑和臂部的摆动来提高运动员的步频和步幅。
在支撑过程中,运动员可以利用地面的反作用力来推动身体向前,从而增加步幅。
同时,在摆动过程中,运动员可以利用臂部的摆动来平衡身体的重心,提高稳定性。
因此,支撑摆动技术对于短跑速度的提升起到了至关重要的作用。
我们来研究支撑摆动技术对于短跑姿势的影响。
短跑的姿势直接影响着运动员的奔跑效果。
支撑摆动技术可以帮助运动员保持正确的姿势。
在支撑过程中,运动员需要保持膝盖微屈,脚掌着地,全身放松。
这样可以减少身体的摩擦阻力,提高奔跑效率。
同时,在摆动过程中,运动员需要保持上半身的稳定,利用臂部的摆动来平衡身体。
这样可以减少身体的摇摆,提高奔跑的稳定性。
因此,支撑摆动技术对于短跑姿势的调整起到了重要的作用。
我们还需要研究支撑摆动技术对于跑者的肌肉力量和协调性的要求。
支撑摆动技术需要运动员具备较强的肌肉力量和协调性。
在支撑过程中,运动员需要迅速发力,将身体向前推进。
这对于腿部的肌肉力量有较高的要求。
在摆动过程中,运动员需要控制臂部的摆动幅度和频率,使其与腿部的支撑配合协调。
这对于上半身的肌肉力量和协调性有较高的要求。
因此,支撑摆动技术对于跑者的肌肉力量和协调性的要求是非常高的。
支撑摆动技术在短跑途中的运用是非常重要的。
它可以通过提高步频和步幅来提高短跑速度,通过调整姿势来提高奔跑效果,通过要求肌肉力量和协调性来提高跑者的综合素质。
因此,研究支撑摆动技术的生物力学机制对于提高短跑成绩和训练方法的改进具有重要的意义。
短跑途中跑支撑阶段支撑腿关节肌肉生物力学特性的研究摘要:本文探讨了短跑运动中跑步支撑阶段对腿关节肌肉生物力学特性的影响。
跑步支撑是一种基于渐变力学原理的速度增长和衰减方式,在短跑运动中占据重要地位。
通过分析感受、参与和综合测试的典型数据,发现跑步支撑阶段能够显著改善腿关节肌肉的生物力学特性,包括力耗能,支撑距离,最大支撑时间和支撑反应时间。
此外,本文还提出了有关如何通过有效地实施跑步支撑来改善运动员的运动性能的一些建议。
关键词:跑步支撑阶段,腿关节肌肉,生物力学特性,改善运动员的运动性能正文:短跑运动以其高强度,短时间的特点受到了普遍的关注。
跑步支撑阶段是短跑运动过程中最重要的跑步动作阶段。
本文的目的是通过探究跑步支撑阶段对腿关节肌肉生物力学特性的影响,从而为未来改善运动员的运动性能提供有价值的参考。
经过实验研究,我们发现,跑步支撑阶段能够显著改善腿关节肌肉的生物力学特性,包括力耗能,支撑距离,最大支撑时间和支撑反应时间。
这些特性有助于提高运动员的短跑表现,并且能够在更短的时间内改善运动员的运动性能。
此外,本文提出了如何有效地实施跑步支撑来改善运动员运动性能的具体建议。
综上所述,本文探讨了跑步支撑阶段对腿关节肌肉生物力学特性的影响,为未来改善运动员运动性能提供了具有价值的参考。
跑步支撑的应用极为重要,可以有效改善运动员的运动性能。
在本文研究的基础上,可以提出一些建议来实际应用跑步支撑这一机制。
首先,在训练中,教练应该利用瞬时感受测试,把跑步支撑阶段作为一个运动单元,并定期对其进行练习,以便在最佳程度上改善腿关节肌肉的生物力学特性。
其次,教练应该分析运动员的跑步技术,尤其是腿关节的变化和支撑距离,并给予相应的调整建议,以使运动员能够更好地利用跑步支撑阶段。
再者,教练应培养运动员耐力,以及前肢、腿部肌肉组织的协调性和反应能力,为改善运动员的运动性能打下基础。
最后,教练应建立一套适合每个运动员的跑步支撑训练计划,并定期对其进行调整,以保证跑步支撑的有效性和可持续性。
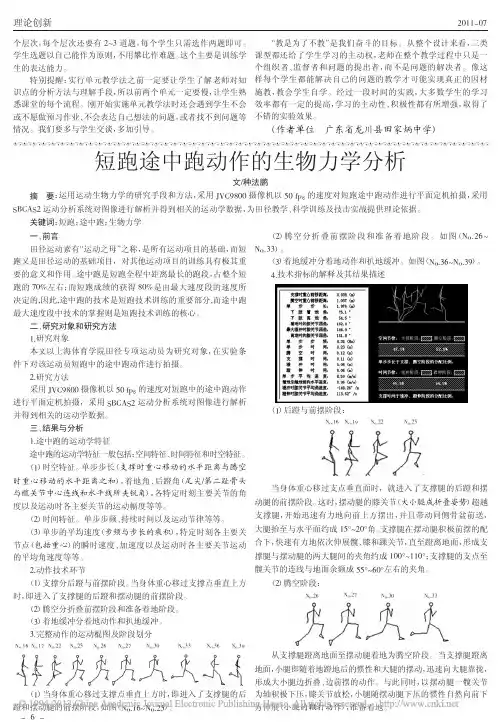
短跑运动控制的生物力学分析魏书涛;刘宇;傅维杰;李庆;钟运健【摘要】目的:通过建立短跑最高速阶段下肢的生物力学模型,探讨短跑运动下肢肌肉在多关节运动中协调、控制功能的生物力学机制,为短跑技术分析、技术最佳化提供依据.方法:使用三维红外高速摄像系统(300 Hz)、三维测力台(1 200 Hz)采集8名高水平短跑运动员在塑胶跑道上全力跑动时的数据.使用环节互动动力学分析短跑最高速时一个步态周期的运动学、动力学数据.研究结果: 1)触地初期,地面反作用力通过膝关节和髋关节前方,在膝、髋关节处产生伸膝、屈髋力矩的外力矩(EXF),此时肌肉力矩(MUS)的主要作用是对抗地面反作用力产生的外力矩(EXF).此时,膝、髋关节处最大MUS分别为203.40±93.60 Nm和455.24±198.72 Nm;蹬伸末期,在髋关节处出现较大的由大腿加速度和髋线加速度产生的惯性力矩(INT),在离地后小腿后摆运动中起到积极作用;2)摆动初期,小腿的后摆主要是惯性力矩引起的;摆动末期肌肉力矩(MUS)与惯性力据(INT)出现最大值,膝关节处为249.32±38.81 Nm、194.01±30.90 Nm,髋关节处为650.81±101.06 Nm、410.80±78.67 Nm.结论:支撑期,肌肉力矩(MUS)和地面反作用力产生的外力矩(EXF)是主要控制下肢运动的主要力矩.支撑末期,大腿加速度及髋线加速度在髋关节处产生较大的惯性力矩(INT),为离地后小腿的积极后摆提供帮助;腾空期,摆动腿的运动主要受肌肉力矩(MUS)和惯性力矩(INT)控制,其中,惯性力矩(INT)主要由小腿的角加速度产生的,两力矩相互作用,以控制与完成下肢的目标动作.【期刊名称】《体育科学》【年(卷),期】2010(030)009【总页数】7页(P37-43)【关键词】环节互动动力学;运动控制;关节力矩;短跑【作者】魏书涛;刘宇;傅维杰;李庆;钟运健【作者单位】上海体育学院,运动科学学院,上海,200438;上海体育学院,运动科学学院,上海,200438;上海体育学院,运动科学学院,上海,200438;清华大学,体育部,北京,100084;上海体育学院,运动科学学院,上海,200438【正文语种】中文【中图分类】G804.6短跑运动成绩主要受运动员在腾空期下肢快速摆动能力、支撑期承受地面反作用力冲击能力以及快速产生推蹬反作用力能力的影响[13,25]。
跑的生物力学分析跑步不但是人体最基本的位移形式,而且体育最基本的体育动作,各项动作技术都包含跑步活动,竞赛中不同距离的跑,其跑步动作的技术基本相同,最终目的都是要求在最短时间内跑完要求的距离。
因此研究其具有代表性的短跑动作牛物学特征和原理具有重要意义。
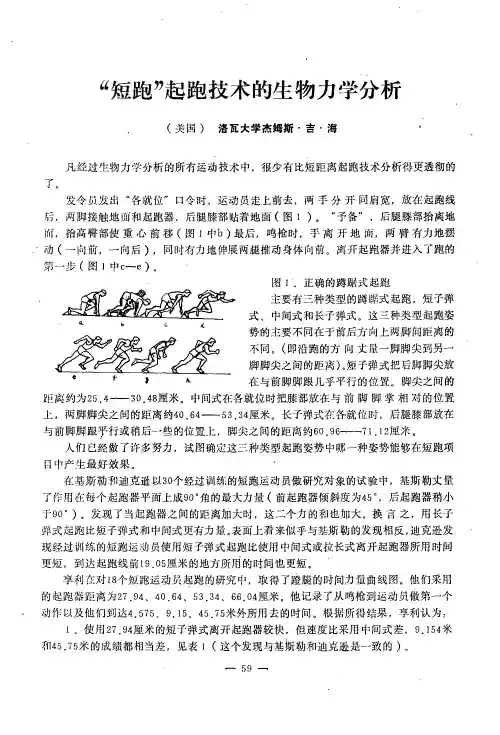
一、起跑姿势与起跑1.起跑姿势运动员一般采用蹲踞式起跑,的方法,根据身体结构和运动素质的发展水平,选择为两腿能快速有效地创造条件的预备姿势,在起跑器上起跑,可使的运动员获得牢固的支撑,改变你两腿用力条件。
在预备时,运动员采用的提高肌肉“预张力”的方法,可以使肌肉提前进入“工作状态”,增大蹬离起跑器的速度和力量。
2.起跑高水平运动员质心水平加速度及速度较大,这与质心离起跑线的距离较短,两臂承受的重过大有关。
二、途中跑途中跑是通过运动员的蹬地动作,使的自身以最大的速度向前跑进,在人体速度较慢的情况下,蹬地动作可以使人产生加速向前跑,飞到达自身极限速度时,能不能增加速度,将身体维持在一个相当短的跑程内,此时蹬地动作所产生的动力,正好与地面产生的阻力相抵消,在前进过程中上水平速度的损失为0.121~0.137米每秒,为了能保证匀速跑,在后蹬阶段应保持水平速度增加0.186~0.204米每秒。
蹬地的水平阻力冲量等于水平动力力量。
(一)跑步的基本生物力学要素步频和步长决定速度,步长包括着地距离,后路距离,腾空距离,三个方面组成。
步频则山全程跑的多数除以跑步时间得来,跑步时间又可分为支撑和腾空两个时间组成。
(二)跑步的生物力学原理由步长、步时的构成,步长、步频指数,摆动技术原理,蹬地动作技术原理和躯干前倾构成。
三、研究目的更好的了解跑步的基木原理,最大程度的发挥人体的潜能,创造更好的成绩。
四、研究方法前言:采用文献资料法、逻辑分析法,根据跑的生物力学发展的规律与特点,对跑的生物力学研究方法进行一定层次的归纳分类、特征分析,跑的运动生物力学研究方法具有科学化特征、实用性特征和实验研究与辩证思维分析相结合特征,并进一步提出应用跑的运动生物力学研究方法应注意的主要问题与建议。
体育科学运动员训练中的生物力学分析体育科学的发展使得运动员的训练变得更加科学化和专业化。
在这个过程中,生物力学起着至关重要的作用。
生物力学研究了运动的机理和力量传递,能够帮助运动员更好地理解和改进他们的训练方法。
本文将探讨体育科学运动员训练中的生物力学分析,以及其对运动员提高竞技水平的重要性。
一、生物力学分析在训练中的应用生物力学分析的主要目的是研究人体在特定运动中的力学特征和节奏。
运动员通过了解身体的力学参数,可以找到最佳的动作方式,并针对其进行训练和改进。
1. 动作分析生物力学分析可以精确测量运动员在特定动作中的关节角度、肌肉力量和运动轨迹。
例如,在射门动作中,生物力学分析可以测量到运动员脚部的着力点和力量传递路径,以及上肢和躯干的协调程度。
这有助于运动员纠正错误的动作,并有效地提高射门准确性和力量。
2. 力量传递运动员通过生物力学分析可以了解力量在不同身体部位之间的传递过程。
例如,篮球运动中的投篮动作,通过分析可以发现身体的动力链是否连贯,是否存在能力流失的环节。
通过训练和改进这一动作,运动员可以提高投篮命中率和射程。
3. 阻力分析生物力学分析还可以帮助运动员分析阻力对运动的影响。
例如,在游泳中,水的阻力对游泳速度有着重要影响。
通过生物力学分析,运动员可以找到减小阻力的方法,如改善姿势、减少阻力面积等。
这对于提高游泳速度和效率至关重要。
二、生物力学分析在不同运动项目中的应用生物力学分析在不同运动项目中的应用是多样化的,下面分别从田径和足球两个项目来进行说明。
1. 田径项目生物力学分析在田径项目中有着广泛的应用。
例如,研究对于短跑项目中的起跑姿势和步频步幅的优化非常重要。
通过生物力学分析,可以确定最佳的起跑角度和步幅组合,从而提高起跑的爆发力和速度。
此外,在跳高项目中,分析运动员起跳时的腿部、臂部和身体倾斜度等参数,可以帮助运动员获得更高的跳跃高度。
2. 足球项目足球是一项复杂的运动,涉及到多种技术和战术。
文章编号:1000 677X(2010)09 0037 07体育科学2010年(第30卷)第9期CH INA S PORT SCIENCEVol.30,No.9,37 43,2010.短跑运动控制的生物力学分析Biomechanical Analysis on MovementControl during Sprint Running魏书涛1,刘 宇1,傅维杰1,李 庆2,钟运健1WEI Shu tao1,LIU Yu1,FU Wei jie1,LI Qing2,ZH ONG Yun jian1摘 要:目的:通过建立短跑最高速阶段下肢的生物力学模型,探讨短跑运动下肢肌肉在多关节运动中协调、控制功能的生物力学机制,为短跑技术分析、技术最佳化提供依据。
方法:使用三维红外高速摄像系统(300H z)、三维测力台(1200Hz)采集8名高水平短跑运动员在塑胶跑道上全力跑动时的数据。
使用环节互动动力学分析短跑最高速时一个步态周期的运动学、动力学数据。
研究结果:1)触地初期,地面反作用力通过膝关节和髋关节前方,在膝、髋关节处产生伸膝、屈髋力矩的外力矩(EXF),此时肌肉力矩(M US)的主要作用是对抗地面反作用力产生的外力矩(EXF)。
此时,膝、髋关节处最大MU S分别为203.40 93.60Nm和455.24 198.72Nm;蹬伸末期,在髋关节处出现较大的由大腿加速度和髋线加速度产生的惯性力矩(INT),在离地后小腿后摆运动中起到积极作用;2)摆动初期,小腿的后摆主要是惯性力矩引起的;摆动末期肌肉力矩(M US)与惯性力据(IN T)出现最大值,膝关节处为249.32 38.81Nm、194.01 30.90Nm,髋关节处为650.81 101.06Nm、410.8078.67N m。
结论:支撑期,肌肉力矩(M U S)和地面反作用力产生的外力矩(EXF)是主要控制下肢运动的主要力矩。
支撑末期,大腿加速度及髋线加速度在髋关节处产生较大的惯性力矩(INT),为离地后小腿的积极后摆提供帮助;腾空期,摆动腿的运动主要受肌肉力矩(MU S)和惯性力矩(INT)控制,其中,惯性力矩(IN T)主要由小腿的角加速度产生的,两力矩相互作用,以控制与完成下肢的目标动作。
关键词:环节互动动力学;运动控制;关节力矩;短跑Abstract:T he pur po se of this study was to analyze the movement contr ol of the low er extr emity by using bio mechanical model dur ing spr int r unning and prov ide the basis for technical analysis and o pt imization of spr int running.M etho ds:T hr ee dimensional v ideo g raphic and g ro undreactio n fo rce(GRF)data wer e co llect ed fr om8outstanding male sprint runners perfo rmingspr int running at their max imum effor t.T he inter seg mental dy namics w as quant ified and thekinemat ics,the g ro und r eact ion f orce were analyzed dur ing a r unning gait cycle of the max imalspeed phase in sprinting.R esult s:Dur ing the initial stag e o f stance phase,t he g round r eactionfor ce passes t hr ough in fr ont of knee and hip joint,pro duces a knee ex tension tor que and hipflex io n to rque.T o co unteract the to rque of GRF,the hamstring muscle co nt racted and pr oduceda f lex ion tor que at knee(203.40 93.60N m)and an extension t orque at hip(455.24198.72N m).At the hip joint,T he IN T due to thig h ang ular accelerat ion and hip velocity hascontributio ns to back swing of leg dur ing later stance phase.Dur ing initial sw ing phase,T heIN T due to leg and thig h angular acceler at ion and hip acceleration has contributio ns to backswing o f leg.T he M U S and the IN T are the dominating tor ques and their maximal v alues wer e249.32 38.81N m,194.01 30.90Nm at knee joint and650.81 101.06N m,410.8078.67N m at hip joint respectiv ely dur ing later sw ing.Conclusio ns:D ur ing st ance phase,themuscle to rques and the gr ound reactio n t orques ar e the ma in t orques that tends to counter acteach o ther for contro lling t he mo vement.T he IN T due to thig h ang ular acceleration and hip velocity has contr ibutio ns t o back sw ing of leg during later stance phase.D ur ing sw ing phase,segment mo vement is co nt rolled mainly by active muscle t orques and motion dependent to rques(due to leg angular acceleratio n),and their functions w ere o pposite and canceled out.Key words:seg ment inter action;movement contr ol;j oint tor que;s p r int r unning中图分类号:G804.6 文献标识码:A收稿日期:2010 05 30; 修订日期:2010 08 30基金项目:国家自然科学基金项目(30871210);上海科委项目(08490512700);上海市 东方学者基金!资助项目。
作者简介:魏书涛(1980 ),男,山东临沂人,在读博士研究生,主要研究方向为运动生物力学,Tel:(021)51253239,E mail:qfw st@;刘宇(1959 ),男,河北张家口人,教授,博士,德国科隆体育大学博士后,主要研究方向为运动生物力学的理论与方法、体育工程,Email:yuliu @;傅维杰,男,浙江嘉善人,在读博士研究生,主要研究方向为运动生物力学。
作者单位:1 上海体育学院运动科学学院,上海200438;2 清华大学体育部,北京1000841 Shanghai University of S port,Shanghai 200438,Chi na;2.T singh ua Un iversity,Beijing 10084,Ch ina.1 前言短跑运动成绩主要受运动员在腾空期下肢快速摆动能力、支撑期承受地面反作用力冲击能力以及快速产生推蹬反作用力能力的影响[13,25]。
因此,针对下肢三环节间的相互作用力矩和它们在膝、髋关节处产生的影响进行研究,有利于帮助运动员和教练员了解短跑运动中支撑期与腾空期下肢肌肉协调、控制运动的功能,进一步理解人体多关节运动控制的生物力学机制,并为技术分析、技术最佳化提供依据。
环节互动动力学必须是通过对肢体运动的动力学方程的逆过程表达式进行重新整理,以分别计算主动的肌肉力和被动的反作用力的分量,据此,探讨人体运动如何受到主动力和被动力的影响,特别是运动过程中出现的肢段间的相互作用现象。
它已经被应用在对闭链系统(closed linked system)运动(如跑的支撑期)[6,12]及开链系统(openlinked systems)运动(如踢、投,跑的腾空期)[8,10,11,16,18,20]的研究中。
其中,Hunter 等人[12]已对短跑支撑期的肌肉力矩和外力矩进行了研究,但他们的研究局限在短跑加速阶段。
M ann[14,15]等人在对短跑的研究中首次计算了肌肉力矩,发现肌肉在膝关节处产生了一个使膝关节屈的力矩,这一力矩由摆动末期一直延续到支撑初期。
针对这一现象,M ann 等人的解释为:在接续摆动后期的着地动作中,大腿带动小腿快速下压,膝关节屈膝力矩的作用是向后快速抓地,配合髋关节伸展带动身体向前,使身体快速通过支点正上方。
此论述虽在现象上解释了这一力矩的功能,但在力学原理上无法自圆其说。
因为跑步支撑阶段,身体受到重力与地面反作用力的作用,所产生的结果,一般认为会使下肢关节受到压缩,而此时如果主动肌肌肉力矩的作用为使关节屈曲,那膝关节岂不坍塌(collapse)而无法支撑身体?因此,M ann 等人的解释并不能完全令人信服。
此后,M ann 、Putnam [14 18]等人在对短跑腾空期及踢球等开链运动模式的研究中发现,用于平衡肌肉力矩(M U S)的力矩是由运动引起的惯性力矩(INT ),但研究并没有提及惯性力矩主要来自于环节运动的哪个分量,而且受试者的运动速度较低,不利于分析惯性力矩对运动控制造成的影响。