Kalman滤波算法
- 格式:doc
- 大小:61.00 KB
- 文档页数:11
卡尔曼滤波参数卡尔曼滤波(Kalman Filter)是一种利用系统的动态模型、观测数据和概率统计方法进行状态估计的算法。
它由美国科学家Rudolf E. Kálmán于1960年提出,被广泛应用于航天、航空、导航、机器人等领域。
卡尔曼滤波是一种最优的线性滤波器,它通过考虑系统模型和测量数据的不确定性来估计系统的最优状态。
卡尔曼滤波的基本思想是利用历史数据和本次观测数据,并结合系统模型进行状态估计,并通过不确定性的协方差矩阵来表示估计值的精确度。
卡尔曼滤波的基本公式如下:1. 预测阶段:状态预测:$\hat{x}_{k|k-1} = F\hat{x}_{k-1|k-1} + Bu_{k-1}$协方差预测:$P_{k|k-1} = FP_{k-1|k-1}F^T + Q$2. 更新阶段:测量残差:$y_k = z_k - H\hat{x}_{k|k-1}$协方差残差:$S_k = HP_{k|k-1}H^T + R$卡尔曼增益:$K_k = P_{k|k-1}H^TS_k^{-1}$状态修正:$\hat{x}_{k|k} = \hat{x}_{k|k-1} + K_ky_k$协方差修正:$P_{k|k} = (I - K_kH)P_{k|k-1}$其中,$F$为状态转移矩阵,描述系统状态从上一个时刻到当前时刻的演变关系;$\hat{x}_{k|k-1}$为对状态的先验估计;$B$为控制输入矩阵,描述外部控制对状态的影响;$u_{k-1}$为上一个时刻的控制输入;$P_{k|k-1}$为对状态估计的先验协方差矩阵;$Q$为过程噪声的协方差矩阵,描述系统模型的不确定性;$H$为观测矩阵,描述观测数据和状态之间的关系;$z_k$为当前时刻的观测数据;$R$为观测噪声的协方差矩阵,描述观测数据的不确定性;$S_k$为协方差残差;$K_k$为卡尔曼增益;$y_k$为测量残差,表示观测数据和状态估计之间的差异;$\hat{x}_{k|k}$为对状态的后验估计,是基于观测数据进行修正后的状态估计;$P_{k|k}$为对状态估计的后验协方差矩阵。
卡尔曼滤波_卡尔曼算法1.引言1.1 概述卡尔曼滤波是一种用于估计系统状态的技术,通过融合传感器测量值和系统模型的预测值,提供对系统状态的最优估计。
它的应用十分广泛,特别在导航、图像处理、机器人技术等领域中发挥着重要作用。
在现实世界中,我们往往面临着各种噪声和不确定性,这些因素会影响我们对系统状态的准确估计。
卡尔曼滤波通过动态调整系统状态的估计值,可以有效地抑制这些干扰,提供更加精确的系统状态估计。
卡尔曼滤波的核心思想是利用系统模型的预测和传感器测量值之间的线性组合,来计算系统状态的最优估计。
通过动态地更新状态估计值,卡尔曼滤波可以在对系统状态的准确估计和对传感器测量值的实时响应之间进行平衡。
卡尔曼滤波算法包括两个主要步骤:预测和更新。
在预测步骤中,通过系统模型和上一时刻的状态估计值,预测当前时刻的系统状态。
在更新步骤中,将传感器测量值与预测值进行比较,然后根据测量误差和系统不确定性的权重,计算系统状态的最优估计。
卡尔曼滤波具有很多优点,例如它对传感器噪声和系统模型误差具有鲁棒性,可以提供较为稳定的估计结果。
此外,卡尔曼滤波还可以有效地处理缺失数据和不完全的测量信息,具有较高的自适应性和实时性。
尽管卡尔曼滤波在理论上具有较好的性能,但实际应用中还需考虑诸如系统模型的准确性、测量噪声的特性等因素。
因此,在具体应用中需要根据实际情况进行算法参数的调整和优化,以提高估计的准确性和可靠性。
通过深入理解卡尔曼滤波的原理和应用,我们可以更好地应对复杂环境下的估计问题,从而在实际工程中取得更好的效果。
本文将介绍卡尔曼滤波的基本原理和算法步骤,以及其在不同领域的应用案例。
希望通过本文的阅读,读者们可以对卡尔曼滤波有一个全面的了解,并能够在实际工程中灵活运用。
1.2文章结构文章结构部分的内容可以按照以下方式编写:1.2 文章结构本文将围绕卡尔曼滤波和卡尔曼算法展开论述。
首先,我们会在引言部分对卡尔曼滤波和卡尔曼算法进行简要概述,介绍其基本原理和应用领域。
卡尔曼滤波的r、q参数(最新版)目录1.卡尔曼滤波简介2.卡尔曼滤波中的 r、q 参数含义3.r、q 参数对卡尔曼滤波效果的影响4.如何设置 r、q 参数5.实际应用案例及注意事项正文一、卡尔曼滤波简介卡尔曼滤波(Kalman filter)是一种线性最优递归滤波算法,用于估计动态系统的状态变量。
它是在维纳滤波(Wiener filter)的基础上引入了系统模型信息,从而提高了滤波效果的一种滤波方法。
卡尔曼滤波广泛应用于导航定位、机器人控制、自动驾驶等领域。
二、卡尔曼滤波中的 r、q 参数含义在卡尔曼滤波中,有两个重要的参数:r 和 q。
它们分别表示状态变量的协方差矩阵 R 和系统噪声矩阵 Q。
其中,- R(State Covariance Matrix)表示系统状态变量的不确定性,是由系统自身的噪声引起的。
它包含了状态变量的方差信息,用于描述状态变量之间的相关性。
- Q(System Noise Covariance Matrix)表示系统噪声的影响,是由外部环境因素引起的。
它包含了噪声的方差信息,用于描述噪声之间的相关性。
三、r、q 参数对卡尔曼滤波效果的影响r 和 q 参数对卡尔曼滤波效果具有重要影响。
它们分别决定了状态变量的不确定性和系统噪声的影响程度。
具体来说:- r 参数越小,表示状态变量的不确定性越小,滤波器对状态变量的估计越精确。
然而,r 参数过小可能导致滤波器过于敏感,对噪声过度响应,从而降低滤波效果。
- q 参数越小,表示系统噪声的影响越小,滤波器对噪声的抑制能力越强。
然而,q 参数过小可能导致滤波器对系统噪声的估计不足,从而降低滤波效果。
四、如何设置 r、q 参数在实际应用中,r、q 参数的设置需要根据具体情况进行调整。
一般可以通过以下方法进行设置:1.根据实际系统的噪声特性和测量误差,估计状态变量的协方差矩阵R 和系统噪声矩阵 Q。
2.结合实际应用需求,调整 r、q 参数以达到较好的滤波效果。

卡尔曼滤波器算法卡尔曼滤波器算法是一种常见的数据处理算法,它能够通过对数据进行滤波,去除噪声和干扰,提高数据质量,广泛应用于各个领域。
本文将对卡尔曼滤波器算法进行详细介绍,包括其原理、应用场景以及实现方法。
一、卡尔曼滤波器算法的原理卡尔曼滤波器算法的原理是基于贝叶斯概率理论和线性系统理论的。
其核心思想是通过对系统状态的不断测量和预测,根据预测值和实际值之间的误差来调整状态估计值,从而获得更准确的状态估计结果。
具体来说,卡尔曼滤波器算法可以分为两个步骤:预测和更新。
1. 预测步骤在预测步骤中,通过上一时刻的状态估计值和状态转移矩阵对当前时刻的状态进行预测。
状态转移矩阵是描述系统状态变化的数学模型,可以根据实际情况进行定义。
2. 更新步骤在更新步骤中,通过测量值和状态预测值之间的误差,计算出卡尔曼增益,从而根据卡尔曼增益调整状态估计值。
卡尔曼增益是一个比例系数,它的大小取决于预测误差和测量误差的比例。
二、卡尔曼滤波器算法的应用场景卡尔曼滤波器算法具有广泛的应用场景,下面列举几个常见的应用场景:1. 飞机导航系统在飞机导航系统中,卡尔曼滤波器算法可以通过对飞机的位置、速度和姿态等参数进行滤波,提高导航的准确性和精度。
2. 机器人控制系统在机器人控制系统中,卡尔曼滤波器算法可以通过对机器人的位置、速度、姿态和力量等参数进行滤波,提高机器人的控制精度和稳定性。
3. 多传感器融合系统在多传感器融合系统中,卡尔曼滤波器算法可以通过对多个传感器的数据进行滤波和融合,提高数据质量和精度。
三、卡尔曼滤波器算法的实现方法卡尔曼滤波器算法的实现方法具有一定的复杂性,下面介绍一般的实现步骤:1. 定义状态向量和状态转移矩阵根据实际情况,定义状态向量和状态转移矩阵,描述系统状态的变化规律。
2. 定义测量向量和观测矩阵根据实际情况,定义测量向量和观测矩阵,描述传感器测量数据与状态向量之间的联系。
3. 计算预测值和预测误差协方差矩阵根据状态向量、状态转移矩阵和误差协方差矩阵,计算预测值和预测误差协方差矩阵。
Kalman滤波和数字滤波一、kalman滤波卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。
采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
它适合于实时处理和计算机运算。
其他的就不介绍了。
公式简介卡尔曼滤波主要是由5个经典公式组成:X(k|k-1)=A X(k-1|k-1)+B U(k) (1)式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的协方差还没更新。
我们用P表示协方差:P(k|k-1)=A P(k-1|k-1) A’+Q (2)式(2)中,P(k|k-1)是X(k|k-1)对应的协方差,P(k-1|k-1)是X(k-1|k-1)对应的协方差,A’表示A的转置矩阵,Q是系统过程的协方差。
式子1,2就是卡尔曼滤波器5个公式当中的前两个,也就是对系统的预测。
现在我们有了现在状态的预测结果,然后我们再收集现在状态的测量值。
结合预测值和测量值,我们可以得到现在状态(k)的最优化估算值X(k|k):X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1)) (3)其中Kg为卡尔曼增益(Kalman Gain):Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R) (4)到现在为止,我们已经得到了k状态下最优的估算值X(k|k)。
但是为了要令卡尔曼滤波器不断的运行下去直到系统过程结束,我们还要更新k状态下X(k|k)的协方差:P(k|k)=(I-Kg(k) H)P(k|k-1) (5)其中I 为1的矩阵,对于单模型单测量,I=1。
当系统进入k+1状态时,P(k|k)就是式子(2)的P(k-1|k-1)。
Kalman滤波算法的特点:(1)由于Kalman滤波算法将被估计的信号看作在白噪声作用下一个随机线性系统的输出,并且其输入/输出关系是由状态方程和输出方程在时间域内给出的,因此这种滤波方法不仅适用于平稳随机过程的滤波,而且特别适用于非平稳或平稳马尔可夫序列或高斯-马尔可夫序列的滤波,所以其应用范围是十分广泛的。
(2)Kalman滤波算法是一种时间域滤波方法,采用状态空间描述系统。
系统的过程噪声和量测噪声并不是需要滤除的对象,它们的统计特征正是估计过程中需要利用的信息,而被估计量和观测量在不同时刻的一、二阶矩却是不必要知道的。
(3)由于Kalman滤波的基本方程是时间域内的递推形式,其计算过程是一个不断地“预测-修正”的过程,在求解时不要求存储大量数据,并且一旦观测到了新的数据,随即可以算的新的滤波值,因此这种滤波方法非常适合于实时处理、计算机实现。
(4)由于滤波器的增益矩阵与观测无关,因此它可预先离线算出,从而可以减少实时在线计算量。
在求滤波器增益矩阵时,要求一个矩阵的逆,它的阶数只取决于观测方程的维数,而该维数通常很小,这样,求逆运算是比较方便的。
另外,在求解滤波器增益的过程中,随时可以算出滤波器的精度指标P,其对角线上的元素就是滤波误差向量各分量的方差。
Kalman滤波的应用领域一般地,只要跟时间序列和高斯白噪声有关或者能建立类似的模型的系统,都可以利用Kalman滤波来处理噪声问题,都可以用其来预测、滤波。
Kalman滤波主要应用领域有以下几个方面。
(1)导航制导、目标定位和跟踪领域。
(2)通信与信号处理、数字图像处理、语音信号处理。
(3)天气预报、地震预报。
(4)地质勘探、矿物开采。
(5)故障诊断、检测。
(6)证券股票市场预测。
具体事例:(1)Kalman滤波在温度测量中的应用;(2)Kalman滤波在自由落体运动目标跟踪中的应用;(3)Kalman滤波在船舶GPS导航定位系统中的应用;(4)Kalman滤波在石油地震勘探中的应用;(5)Kalman滤波在视频图像目标跟踪中的应用;。
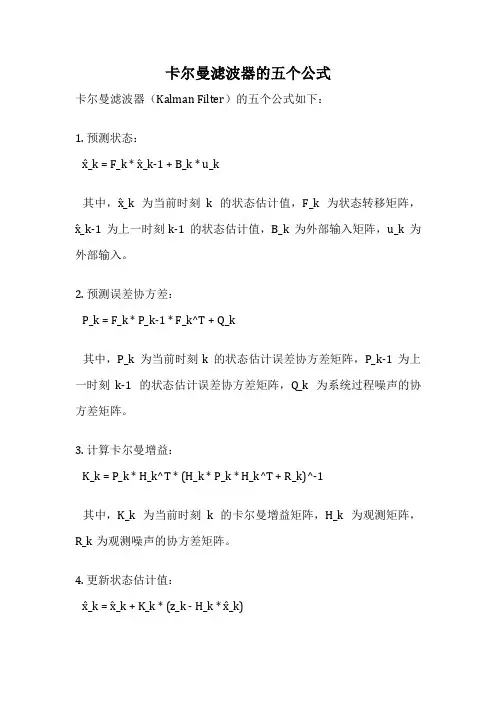
卡尔曼滤波器的五个公式
卡尔曼滤波器(Kalman Filter)的五个公式如下:
1. 预测状态:
x̂_k = F_k * x̂_k-1 + B_k * u_k
其中,x̂_k为当前时刻k的状态估计值,F_k为状态转移矩阵,x̂_k-1为上一时刻k-1的状态估计值,B_k为外部输入矩阵,u_k为外部输入。
2. 预测误差协方差:
P_k = F_k * P_k-1 * F_k^T + Q_k
其中,P_k为当前时刻k的状态估计误差协方差矩阵,P_k-1为上一时刻k-1的状态估计误差协方差矩阵,Q_k为系统过程噪声的协方差矩阵。
3. 计算卡尔曼增益:
K_k = P_k * H_k^T * (H_k * P_k * H_k^T + R_k)^-1
其中,K_k为当前时刻k的卡尔曼增益矩阵,H_k为观测矩阵,R_k为观测噪声的协方差矩阵。
4. 更新状态估计值:
x̂_k = x̂_k + K_k * (z_k - H_k * x̂_k)
其中,z_k为当前时刻k的观测值。
5. 更新状态估计误差协方差:
P_k = (I - K_k * H_k) * P_k
其中,I为单位矩阵。
卡尔曼滤波计算举例⏹计算举例⏹卡尔曼滤波器特性假设有一个标量系统,信号与观测模型为[1][][]x k ax k n k +=+[][][]z k x k w k =+其中a 为常数,n [k ]和w [k ]是不相关的零均值白噪声,方差分别为和。
系统的起始变量x [0]为随机变量,其均值为零,方差为。
2nσ2σ[0]x P (1)求估计x [k ]的卡尔曼滤波算法;(2)当时的卡尔曼滤波增益和滤波误差方差。
220.9,1,10,[0]10nx a P =σ=σ==1. 计算举例根据卡尔曼算法,预测方程为:ˆˆ[/1][1/1]xk k ax k k -=--预测误差方差为:22[/1][1/1]x x nP k k a P k k -=--+σ卡尔曼增益为:()1222222[][/1][/1][1/1][1/1]x x x nx n K k P k k P k k a P k k a P k k -=--+σ--+σ=--+σ+σˆˆˆ[/][/1][]([][/1])ˆˆ[1/1][]([][1/1])ˆ(1[])[1/1][][]xk k x k k K k z k x k k axk k K k z k ax k k a K k xk k K k z k =-+--=--+---=---+滤波方程:()()2222222222222[/](1[])[/1][1/1]1[1/1][1/1][1/1][1/1]x x x nx n x n x nx nP k k K k P k k a P k k a P k k a P k k a P k k a P k k =--⎛⎫--+σ=---+σ ⎪--+σ+σ⎝⎭σ--+σ=--+σ+σ滤波误差方差起始:ˆ[0/0]0x=[0/0][0]x x P P =k [/1]x P k k -[/]x P k k []K k 012345689104.76443.27012.67342.27652.21422.18362.16832.16089.104.85923.64883.16542.94752.84402.79352.76870.47360.32700.26730.24040.22770.22140.21840.2168ˆ[0/0]0x=[0/0]10x P =220.9110na =σ=σ=2. 卡尔曼滤波器的特性从以上计算公式和计算结果可以看出卡尔曼滤波器的一些特性:(1)滤波误差方差的上限取决于测量噪声的方差,即()2222222[1/1][/][1/1]x nx x na P k k P k k a P k k σ--+σ=≤σ--+σ+σ2[/]x P k k ≤σ这是因为(2)预测误差方差总是大于等于扰动噪声的方差,即2[/1]x nP k k -≥σ这是因为222[/1][1/1]x x n nP k k a P k k -=--+σ≥σ(3)卡尔曼增益满足,随着k 的增加趋于一个稳定值。
卡尔曼滤波原理卡尔曼滤波(Kalman Filtering)是一种用于估计、预测和控制的最优滤波方法,由美国籍匈牙利裔数学家卡尔曼(Rudolf E. Kalman)在1960年提出。
卡尔曼滤波是一种递归滤波算法,通过对测量数据和系统模型的融合,可以得到更准确、更可靠的估计结果。
在各种应用领域,如导航、机器人、航空航天、金融等,卡尔曼滤波都被广泛应用。
1. 卡尔曼滤波的基本原理卡尔曼滤波的基本原理是基于状态空间模型,将系统的状态用随机变量来表示。
它假设系统的状态满足线性高斯模型,并通过线性动态方程和线性测量方程描述系统的演化过程和测量过程。
具体而言,卡尔曼滤波算法基于以下两个基本步骤进行:1.1 预测步骤:通过系统的动态方程预测当前时刻的状态,并计算预测的状态协方差矩阵。
预测步骤主要是利用前一时刻的状态和控制输入来预测当前时刻的状态。
1.2 更新步骤:通过系统的测量方程,将预测的状态与实际测量值进行融合,得到最优估计的状态和状态协方差矩阵。
更新步骤主要是利用当前时刻的测量值来修正预测的状态。
通过不断迭代进行预测和更新,可以得到连续时间上的状态估计值,并获得最优的估计结果。
2. 卡尔曼滤波的优势卡尔曼滤波具有以下几个优势:2.1 适用于线性系统与高斯噪声:卡尔曼滤波是一种基于线性高斯模型的滤波方法,对于满足这些条件的系统,卡尔曼滤波能够给出最优的估计结果。
2.2 递归计算:卡尔曼滤波是一种递归滤波算法,可以在每个时刻根据当前的测量值和先前的估计结果进行迭代计算,不需要保存过多的历史数据。
2.3 最优性:卡尔曼滤波可以通过最小均方误差准则,给出能够最优估计系统状态的解。
2.4 实时性:由于卡尔曼滤波的递归计算特性,它可以实时地处理数据,并及时根据新的测量值进行估计。
3. 卡尔曼滤波的应用卡尔曼滤波在多个领域都有广泛的应用,以下是一些典型的应用例子:3.1 导航系统:卡尔曼滤波可以用于导航系统中的位置和速度估计,可以结合地面测量值和惯性测量传感器的数据,提供精确的导航信息。
一阶卡尔曼滤波和二阶滤波一阶卡尔曼滤波和二阶卡尔曼滤波是常用的滤波算法,用于处理含有噪声的观测数据,提取出真实的信号。
1.一阶卡尔曼滤波(First-Order Kalman Filter)一阶卡尔曼滤波是一种递归滤波算法,通过过去的观测数据和当前的测量数据,结合系统动力学模型,预测下一时刻的状态,并更新状态估计值。
一阶卡尔曼滤波的基本流程如下:-初始化初始状态和协方差矩阵;-读取测量数据;-根据状态转移方程和观测方程,进行预测和更新;-重复上述步骤,直到所有的测量数据被处理完毕。
在每一时刻,一阶卡尔曼滤波通过融合测量数据和状态模型,得出最优的状态估计值。
它主要包括两个步骤:预测和更新。
预测步骤:假设当前时刻为k,计算预测状态和预测协方差矩阵。
-预测状态:根据上一时刻的状态估计值和状态转移方程,得出当前时刻的预测状态值。
-预测协方差矩阵:根据上一时刻的协方差矩阵和状态转移方程,得出当前时刻的预测协方差矩阵。
更新步骤:利用测量数据校正预测结果,得到更加准确的状态估计值和协方差矩阵。
-计算卡尔曼增益:通过预测协方差矩阵和观测噪声的协方差矩阵,得出卡尔曼增益。
-更新状态:根据预测状态、卡尔曼增益和测量数据,计算新的状态估计值。
-更新协方差矩阵:根据卡尔曼增益和预测协方差矩阵,计算新的协方差矩阵。
一阶卡尔曼滤波适用于线性系统和高斯噪声的情况。
它能够有效地滤除高频噪声,提取出信号的低频成分。
2.二阶卡尔曼滤波(Second-Order Kalman Filter)二阶卡尔曼滤波是对一阶卡尔曼滤波的扩展,它考虑了系统状态的一、二阶导数信息,能够更好地适应非线性系统和非高斯噪声的情况。
二阶卡尔曼滤波在预测步骤和更新步骤中引入了状态的一、二阶导数信息,使得状态估计更加准确。
其基本流程与一阶卡尔曼滤波类似。
预测步骤:加入状态的一、二阶导数信息。
-预测状态:根据上一时刻的状态估计值、一、二阶导数信息和状态转移方程,得出当前时刻的预测状态值。
第4章 卡尔曼(Kalman )滤波卡尔曼滤波的思想是把动态系统表示成状态空间形式,是一种连续修正系统的线性投影算法。
功能 1) 连续修正系统的线性投影算法。
2)用于计算高斯ARMA 过程的精确有限样本预测和精确的似然函数。
3) 分解矩阵自协方差生成函数或谱密度。
4)估计系数随时间变化的向量自回归。
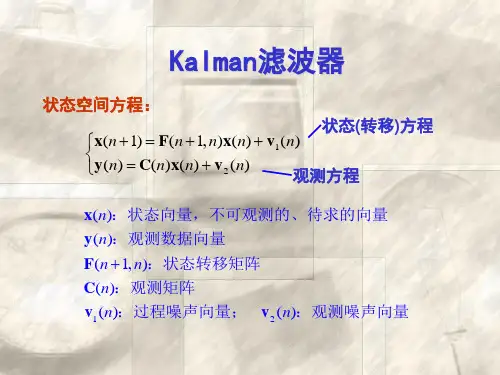
第一节 动态系统的状态空间表示一.假设条件令t y 表示时期t 观察到变量的一个()1n ×向量。
则t y 的动态可以用不可观测的()1r ×向量t ξ来表示,t ξ为状态向量。
t y 的动态系统可以表示为如下的状态空间模型:11t t t F v ξξ++=+ (1)t t t t y A x H w ξ′′=++ (2)其中′′F,A ,H 分别为()r r ×,()n k ×和()n r ×矩阵,t x 是外生变量或前定变量的()1k ×向量。
方程(1)称为状态方程,方程(2)称为观察方程。
其中()1r ×向量t v 和()1n ×向量t w 为向量白噪声:()()00t t Qt E v v t R t E w w t ττττττ=⎧′=⎨≠⎩=⎧′=⎨≠⎩ (3)其中,Q R 为()(),r r n n ××矩阵。
假定扰动项t v 和t w 在所有阶滞后都不相关:()0t t E v w ′= 对所有的t 和τ (4)t x 为前定或外生变量,意味着对0,1,2,....,s =除包含在121,,...,t t y y y −−之内的信息外,t x 不再能提供关于t s ξ+以及t s w +的任何信息。
即t x 可能包含y 的滞后值或所有与τ、τξ和w τ不相关变量。
状态空间系统描述有限观察值序列{}1,...,T y y ,需要知道状态向量的初始值1ξ,根据状态方程(1),t ξ可写作()123,,,...,t v v v ξ的线性函数: 2211221....t t t t t t v Fv F v F v F ξξ−−−−=+++++ 2,3,...,t T = (5)这里假定1ξ与t v 和t w 的任何实现都不相关:()()1101,2,...,01,2,...,t t E v TE w Tξτξτ′==′== (6)根据(3)和(6),得t v 和ξ的滞后值不相关:()0t E v τξ′= 1,2,...,1t t τ=−− (7) ()0t E w τξ′= 1,2,...,T τ= (8) ()()()0t t E w y E w A x H w ττττξ′′′=++= 1,2,...,1t t τ=−− (9) ()0t E v y τ′= 1,2,...,1t t τ=−− (10)二.状态空间系统的例子例1 ()AR p 过程,()()()112111...t t t p t p t y y y y µφµφµφµε+−−++−=−+−++−+ (11)()2t t E t τστεετ⎧==⎨≠⎩ (12) 可以写作状态空间形式。
本文将对卡尔曼滤波算法进行示例解析与公式推导,帮助读者更好地理解该算法的原理和应用。
文章将从以下几个方面展开:一、卡尔曼滤波算法的概念卡尔曼滤波算法是一种用于估计动态系统状态的线性无偏最优滤波算法。
它利用系统的动态模型和观测数据,通过迭代更新状态估计值,实现对系统状态的精确估计。
卡尔曼滤波算法最初是由美国工程师鲁道夫·卡尔曼在20世纪60年代提出,随后得到了广泛的应用和研究。
二、卡尔曼滤波算法的原理1. 状态空间模型在卡尔曼滤波算法中,系统的动态模型通常用状态空间模型表示。
状态空间模型由状态方程和观测方程组成,其中状态方程描述系统的演化规律,观测方程描述观测数据与状态之间的关系。
通过状态空间模型,可以对系统的状态进行预测,并与观测数据进行融合,从而估计系统的状态。
2. 卡尔曼滤波的预测与更新卡尔曼滤波算法以预测-更新的方式进行状态估计。
在预测阶段,利用系统的动态模型和之前时刻的状态估计值,对当前时刻的状态进行预测;在更新阶段,将预测值与观测数据进行融合,得到最优的状态估计值。
通过迭代更新,可以不断优化对系统状态的估计,实现对系统状态的精确跟踪。
三、卡尔曼滤波算法的示例解析以下通过一个简单的例子,对卡尔曼滤波算法进行具体的示例解析,帮助读者更好地理解该算法的应用过程。
假设有一个匀速直线运动的物体,其位置由x和y坐标表示,观测到的位置数据带有高斯噪声。
我们希望利用卡尔曼滤波算法对该物体的位置进行估计。
1. 状态空间模型的建立我们建立物体位置的状态空间模型。
假设物体在x和y方向上的位置分别由状态变量x和y表示,动态模型可以用如下状态方程描述:x(k+1) = x(k) + vx(k) * dty(k+1) = y(k) + vy(k) * dt其中,vx和vy分别为x和y方向的速度,dt表示时间间隔。
观测方程可以用如下形式表示:z(k) = H * x(k) + w(k)其中,z(k)为观测到的位置数据,H为观测矩阵,w(k)为观测噪声。
卡尔曼滤波详解卡尔曼滤波是一种常用的状态估计方法,它可以根据系统的动态模型和观测数据,对系统的状态进行估计。
卡尔曼滤波广泛应用于机器人导航、飞行控制、信号处理等领域。
本文将详细介绍卡尔曼滤波的原理、算法及应用。
一、卡尔曼滤波原理卡尔曼滤波的基本思想是利用系统的动态模型和观测数据,对系统的状态进行估计。
在卡尔曼滤波中,系统的状态被表示为一个向量,每个元素表示系统的某个特定状态量。
例如,一个机器人的状态向量可能包括机器人的位置、速度、方向等信息。
卡尔曼滤波的基本假设是系统的动态模型和观测数据都是线性的,而且存在噪声。
系统的动态模型可以表示为:x(t+1) = Ax(t) + Bu(t) + w(t)其中,x(t)表示系统在时刻t的状态向量,A是状态转移矩阵,B是控制矩阵,u(t)表示外部控制输入,w(t)表示系统的过程噪声。
观测数据可以表示为:z(t) = Hx(t) + v(t)其中,z(t)表示系统在时刻t的观测向量,H是观测矩阵,v(t)表示观测噪声。
卡尔曼滤波的目标是根据系统的动态模型和观测数据,估计系统的状态向量x(t)。
为了达到这个目标,卡尔曼滤波将状态估计分为两个阶段:预测和更新。
预测阶段:根据系统的动态模型,预测系统在下一个时刻的状态向量x(t+1)。
预测的过程可以表示为:x^(t+1|t) = Ax^(t|t) + Bu(t)其中,x^(t|t)表示在时刻t的状态向量的估计值,x^(t+1|t)表示在时刻t+1的状态向量的预测值。
卡尔曼滤波还需要对状态的不确定性进行估计,这个不确定性通常用协方差矩阵P(t)表示。
协方差矩阵P(t)表示状态向量估计值和真实值之间的差异程度。
预测阶段中,协方差矩阵也需要进行更新,更新的过程可以表示为:P(t+1|t) = AP(t|t)A' + Q其中,Q表示过程噪声的协方差矩阵。
更新阶段:根据观测数据,更新状态向量的估计值和协方差矩阵。
更新的过程可以表示为:K(t+1) = P(t+1|t)H'(HP(t+1|t)H' + R)^-1x^(t+1|t+1) = x^(t+1|t) + K(t+1)[z(t+1) - Hx^(t+1|t)]P(t+1|t+1) = (I - K(t+1)H)P(t+1|t)其中,K(t+1)表示卡尔曼增益,R表示观测噪声的协方差矩阵,I是单位矩阵。
锂电池soc的算法卡尔曼(kalman)滤波法
锂电池State of Charge (SOC) 的算法中,卡尔曼滤波法被广泛用于估计电池的SOC,即电池的容量剩余。
卡尔曼滤波法是一种递归滤波算法,用于估计系统的状态。
在电池SOC的估计中,卡尔曼滤波法结合电池的电流和电压测量数据,并根据电池特性和模型进行状态估计,得出最优的SOC估计结果。
卡尔曼滤波法的基本思想是通过对测量数据和模型预测数据进行加权平均,使估计结果更加准确。
它利用系统的动态模型和观测数据的统计特性来进行状态估计,同时考虑数据的噪声以及系统的不确定性。
在电池SOC的估计中,卡尔曼滤波法的状态向量可以包括当前电池SOC的估计值、电流的估计值、电压的估计值等。
观测向量则包括实际测量的电流和电压值。
系统的动态模型可以通过电池特性方程和电路模型等来建立。
卡尔曼滤波法对于电池SOC的估计具有以下优点:
- 可以考虑系统的不确定性和测量的噪声,提高估计的精度和稳定性。
- 可以动态更新估计结果,适应系统的变化和不确定性。
需要注意的是,卡尔曼滤波法对系统的模型和参数要求较高。
因此,在实际应用中,需要根据电池的具体特性和实测数据来
进行相应的参数优化和模型适配,以获取更好的SOC估计结果。
Kalman 滤波算法姓名:刘金强专业:控制理论与控制工程学号:2007255◆实验目的:(1)、掌握klman 滤波实现的原理和方法(2)、掌握状态向量预测公式的实现过程(3)、了解Riccati 差分方程实现的过程和新息的基本性质和过程的计算 ◆实验要求:问题:F=[a1,a2,a3],其中a1=[1.0 0 0]的转置,a2=[0.3 1.0 0]的转置,a3=[0.1 0.2 0.4]的转置,x(0)=[3,-1,2]的转置;C=[b1,b2,b3],其中b1=[0.3 0.5]的转置,b2=[1,0.4]的转置,b3=[0.8 -0.7]的转置;V1(n)=[0 0 n1(n)sin(0.1n)]的转置,V2(n)=[n2(n) n3(n)];n1(n)为均值为零,方差为1的均匀分布白噪声;n2(n),n3(n)为均值为0,方差为0.1的均匀分布白噪声,n1(n),n2(n),n3(n)相互独立,试用卡尔曼滤波器算法估计x^(n).◆实验原理:初始条件:1ˆ(1)x=E{x(1)} K(1,0)=E{[x(1)- (1)x ][x(1)- (1)H x ]},其中(1)x =E{x(1)}输入观测向量过程:观测向量序列={y(1),…………y(n)}已知参数:状态转移矩阵F(n+1,n)观测矩阵C(n)过程噪声向量的相关矩阵1()Q n观测噪声向量的相关矩阵2()Q n计算:n=1,2,3,……………….G(n)=F(n+1,n)K(n,n+1) ()H C n 12[()(,1)()()]H C n K n n C n Q n --+Kalman 滤波器是一种线性的离散时间有限维系统。
Kalman 滤波器的估计性能是:它使滤波后的状态估计误差的相关矩阵P(n)的迹最小化。
这意味着,kalman 滤波器是状态向量x(n)的线性最小方差估计。
◆实验结果:◆程序代码:(1)主程序/******************************************************************** 问题:F=[a1,a2,a3],其中a1=[1.0 0 0]的转置,a2=[0.3 1.0 0]的转置,a3=[0.1 0.2 0.4]的转置,x(0)=[3,-1,2]的转置;C=[b1,b2,b3],其中b1=[0.3 0.5]的转置,b2=[1,0.4]的转置,b3=[0.8 -0.7]的转置;V1(n)=[0 0 n1(n)sin(0.1n)]的转置,V2(n)=[n2(n) n3(n)];n1(n)为均值为零,方差为1的均匀分布白噪声;n2(n),n3(n)为均值为0,方差为0.1的均匀分布白噪声,n1(n),n2(n),n3(n)相互独立,试用卡尔曼滤波器算法估计x^(n).********************************************************************* 设计作者:刘金强设计时间:2008年11月22日作者专业:控制理论与控制工程作者学号:2007255********************************************************************/ #include <iostream.h>#include "MathMatrix.h"#include <math.h>#include <string.h>void GaussInverse(double **a, int n);#define NUM 80 //最大序列数void main(){CMathMatrix MM;int i;int j, w;double F[3][3] = {1.0,0.3,0.1, 0, 0.1,0.2,0, 0, 0.4}; //状态转移矩阵double F_1[3][3] = {1.0,0.3,0.1,0, 0.1,0.2,0, 0, 0.4}; //状态转移矩阵的逆double **FN = new double * [3]; //申请内存空间for (i = 0; i < 3; i++){FN[i] = new double [3]; //开辟一个二维数组}for (i = 0; i < 3; i++){for (j = 0; j < 3; j++){FN[i][j] = F_1[i][j];}}GaussInverse(FN, 3);for (i = 0; i < 3; i++){for (j = 0; j < 3; j++){F_1[i][j] = FN[i][j];}}double F_T[3][3] = {1.0, 0, 0,0.3,1.0, 0,0.1,0.2,0.4}; //状态转移矩阵的转置double x[3] = {3,-1,2}; //状态向量double x1[3] = {0,0,0}; //状态预测估计向量double C[2][3] = {0.3, 1, 0.8,0.5,0.4,-0.7}; //观测矩阵double C_T[3][2] = {0.3,0.5,1, 0.4, 0.8,-0.7}; //观测矩阵的转置double alpha[2]={0}; //新息double v1[3]={0}; //过程噪声double Q1[3][3]={0}; //过程噪声相关矩阵double v2[2]={0}; //观测噪声double Q2[2][2]={0}; //观测噪声相关矩阵double y[NUM][2]={0}; //观测值序列double xx[3][NUM+1]={0}; //状态向量序列double K[3][3]={1,0,0,0,1,0,0,0,1}; //误差相关矩阵double G[3][2]={0}; //卡尔曼增益double P[3][3]={0}; //滤波状态向量的误差向量double n[NUM*2]={0};double n1[NUM]={0}; //噪声序列n1,n2,n3double n2[NUM]={0};double n3[NUM]={0};double M_3x1[3]={0};double M_1x3[3]={0};double M_3x3[3][3]={0};double M1_3x3[3][3]={0};double M_3x2[3][2]={0};double M_2x3[2][3]={0};double M_2x2[2][2]={0};double **MMid = new double *[2];for (i = 0; i < 2; i++){MMid[i] = new double [2];}double M_2x1[2]={0};double real_value[3][NUM]={0};double predict_value[3][NUM]={0};MM.random(NUM,n1,0,1); //产生高斯白噪声MM.random(NUM*2,n,0,0.2); //产生高斯白噪声memcpy(&n2[1],n,(NUM-1)*8);memcpy(&n3[1],n+NUM-1,(NUM-1)*8);real_value[0][1] = x[0];real_value[1][1] = x[1];real_value[2][1] = x[2];for(i=1;i<NUM;i++) //生成观测序列y{v2[0] = n2[i];v2[1] = n3[i];v1[0] = 0;v1[1] = 0;v1[2] = n1[i]*sin(0.1*(double)i);real_value[0][i] = x[0];real_value[1][i] = x[1];real_value[2][i] = x[2];MM.Maxtrix_multiply(&C[0][0],2,3,&x[0],3,1,&M_2x1[0]);MM.Maxtrix_add(&v2[0],&M_2x1[0],2,1);MM.Maxtrix_add(&M_2x1[0],&y[i][0],2,1);MM.Maxtrix_multiply(&F[0][0],3,3,&x[0],3,1,&M_3x1[0]);MM.Maxtrix_add(&v1[0],&M_3x1[0],3,1);x[0]=0;x[1]=0;x[2]=0;MM.Maxtrix_add(&M_3x1[0],&x[0],3,1);}for(i=1;i<NUM;i++){//计算G(n)MM.Maxtrix_multiply(&F[0][0],3,3,&K[0][0],3,3,&M_3x3[0][0]);MM.Maxtrix_multiply(&M_3x3[0][0],3,3,&C_T[0][0],3,2,&M_3x2[0][0]) ;MM.Maxtrix_multiply(&C[0][0],2,3,&K[0][0],3,3,&M_2x3[0][0]);MM.Maxtrix_multiply(&M_2x3[0][0],2,3,&C_T[0][0],3,2,&M_2x2[0][0]) ;v2[0] = n2[i];v2[1] = n3[i];MM.Maxtrix_multiply(&v2[0],2,1,&v2[0],1,2,&Q2[0][0]);MM.Maxtrix_add(&Q2[0][0],&M_2x2[0][0],2,2);MMid[0][0] = M_2x2[0][0];MMid[0][1] = M_2x2[0][1];MMid[1][0] = M_2x2[1][0];MMid[1][1] = M_2x2[1][1];GaussInverse(MMid,2);M_2x2[0][0] = MMid[0][0];M_2x2[0][1] = MMid[0][1];M_2x2[1][0] = MMid[1][0];M_2x2[1][1] = MMid[1][1];MM.Maxtrix_multiply(&M_3x2[0][0],3,2,&M_2x2[0][0],2,2,&G[0][0]);//计算α(n)MM.Maxtrix_multiply(&C[0][0],2,3,&x1[0],3,1,&M_2x1[0]);MM.Maxtrix_sub(&y[i][0],&M_2x1[0],&alpha[0],2,1);//估计x1predict_value[0][i] = x1[0];predict_value[1][i] = x1[1];predict_value[2][i] = x1[2];MM.Maxtrix_multiply(&F[0][0],3,3,&x1[0],3,1,&M_3x1[0]);MM.Maxtrix_multiply(&G[0][0],3,2,&alpha[0],2,1,&x1[0]);MM.Maxtrix_add(&M_3x1[0],&x1[0],3,1);cout<<"估计第"<<i<<"次的值为:"<<endl;cout<<x[0]<<" "<<x1[0]<<endl<<x[1]<<" "<<x1[1]<<endl<<x[2]<<" "<<x1[2]<<endl;//计算P(n)MM.Maxtrix_multiply(&F_1[0][0],3,3,&G[0][0],3,2,&M_3x2[0][0]); MM.Maxtrix_multiply(&M_3x2[0][0],3,2,&C[0][0],2,3,&M_3x3[0][0]);MM.Maxtrix_multiply(&M_3x3[0][0],3,3,&K[0][0],3,3,&M1_3x3[0][0]);MM.Maxtrix_sub(&K[0][0],&M1_3x3[0][0],&P[0][0],3,3);//生成Q1(n)v1[0] = 0;v1[1] = 0;v1[2] = n1[i]*sin(0.1*(double)i);MM.Maxtrix_multiply(&v1[0],3,1,&v1[0],1,3,&Q1[0][0]);//计算K(n)MM.Maxtrix_multiply(&F[0][0],3,3,&P[0][0],3,3,&M_3x3[0][0]);MM.Maxtrix_multiply(&M_3x3[0][0],3,3,&F_T[0][0],3,3,&K[0][0]);MM.Maxtrix_add(&Q1[0][0],&K[0][0],3,3);}//释放内存for (i= 0; i < 3; i++){delete [] FN[i];}delete [] FN;for (i = 0; i < 2; i++){delete [] MMid[i];}delete [] MMid;}(2)CMathMatrix文件的源文件CMathMatrix.cpp:// mathMatrix.cpp: implementation of the CmathMatrix class./////////////////////////////////////////////////////////////////// #include "mathMatrix.h"#include <time.h>#include <math.h>#include <stdio.h>#include <stdlib.h>#include <iostream.h>#define SWAP(a,b) {temp=(a);(a)=(b);(b)=temp;}/////////////////////////////////////////////////////////////////// // Construction/Destruction/////////////////////////////////////////////////////////////////// CMathMatrix::CMathMatrix(){}CMathMatrix::~CMathMatrix(){}//矩阵求逆int *ivector(long nl, long nh);void nrerror(char error_text[]);void free_ivector(int *v, long nl, long nh);void GaussInverse(double **a, int n){int *indxc, *indxr, *ipiv;int i, icol, irow, j, k, l, ll;double big, dum, pivinv, temp;indxc = ivector(1,n);indxr = ivector(1,n);ipiv = ivector(1,n);for ( j = 1; j <= n; j++ ) ipiv[j] = 0;for ( i = 1; i <= n; i++ ){big = 0.0;for (j = 1; j <= n; j++)if (ipiv[j] != 1)for (k = 1;k <= n; k++){if (ipiv[k] == 0){if (fabs(a[j-1][k-1]) >= big){big = fabs(a[j-1][k-1]);irow = j;icol = k;}}else if ( ipiv[k] > 1)nrerror("gaussj: Singular Matrix-1");}++(ipiv[icol]);if ( irow != icol ){for ( l = 1; l <= n; l++ )SWAP(a[irow-1][l-1],a[icol-1][l-1]);}indxr[i] = irow;indxc[i] = icol;if (a[icol-1][icol-1] == 0.0)nrerror("gaussj: Singular Matrix-2");pivinv = 1.0/a[icol-1][icol-1];a[icol-1][icol-1] = 1.0;for (l = 1; l <= n; l++)a[icol-1][l-1] *= pivinv;for (ll = 1; ll <= n; ll++)if ( ll != icol ){dum = a[ll-1][icol-1];a[ll-1][icol-1] = 0.0;for ( l = 1; l <= n; l++)a[ll-1][l-1] -= a[icol-1][l-1] * dum;}}for (l = n; l >= 1; l--){if (indxr[l] != indxc[l])for (k = 1; k <= n; k++)SWAP(a[k-1][indxr[l]-1], a[k-1][indxc[l]-1]);}free_ivector(ipiv,1,n);free_ivector(indxr,1,n);free_ivector(indxc,1,n);}#undef SWAP#undef NRANSI//生成高斯白噪声void CMathMatrix::random(int n, double *e, float mean, float var) {long j;float a, b, tt;srand((unsigned)time(NULL));for(j = 0; j < n; j++){tt = rand();if((tt - 0.000001) < 0){j--;continue;}a = sqrt(-2.0 * log(tt / 32767.0));b = 2 * 3. * rand() / 32767.0;e[j] = var * a * cos(b) + mean;}}//矩阵相加void CMathMatrix::Maxtrix_add(double *Matrix_A, double *Matrix_B, unsigned int row, unsigned int col){unsigned int i,j;for(i=0;i<row;i++)for(j=0;j<col;j++)Matrix_B[i*col+j] += Matrix_A[i*col+j];}//矩阵相减void CMathMatrix::Maxtrix_sub(double *Matrix_A, double *Matrix_B, double *Matrix_C, unsigned int row, unsigned int col){unsigned int i,j;for(i=0;i<row;i++)for(j=0;j<col;j++)Matrix_C[i*col+j] = Matrix_A[i*col+j]-Matrix_B[i*col+j];}//矩阵相乘void CMathMatrix::Maxtrix_multiply(double *Matrix_A, unsigned intA_row, unsigned int A_col, double *Matrix_B, unsigned int B_row, unsigned int B_col, double *Matrix_out){unsigned int i,j,k;double sum = 0;for(i=0;i<A_row;i++)for(j=0;j<B_col;j++){sum = 0;for(k=0;k<A_col;k++)sum+=Matrix_A[i*A_col+k]*Matrix_B[k*B_col+j];Matrix_out[i*B_col+j] = sum;}}(3)、CMathMatrix文件的头文件CMathMatrix.h:// MathMatrix.h: interface for the CMathMatrix class./////////////////////////////////////////////////////////////////////// /#if !defined(AFX_MATHMATRIX_H__718FA3C9_4408_4B30_BA72_F9C28742A8F5__ INCLUDED_)#defineAFX_MATHMATRIX_H__718FA3C9_4408_4B30_BA72_F9C28742A8F5__INCLUDED_#if _MSC_VER > 1000#pragma once#endif // _MSC_VER > 1000class CMathMatrix{public://生成高斯白噪声void random(int n, double *e, float mean, float var);//矩阵相加void CMathMatrix::Maxtrix_add(double *Matrix_A, double *Matrix_B, unsigned int row, unsigned int col);//矩阵相减void CMathMatrix::Maxtrix_sub(double *Matrix_A, double *Matrix_B, double *Matrix_C, unsigned int row, unsigned int col);//矩阵相乘void CMathMatrix::Maxtrix_multiply(double *Matrix_A, unsigned int A_row, unsigned int A_col, double *Matrix_B, unsigned int B_row, unsigned int B_col, double *Matrix_out);//矩阵求逆void GaussInverse(double **a, int n);//默认构造函数与析构函数CMathMatrix();virtual ~CMathMatrix();};#endif// !defined(AFX_MATHMATRIX_H__718FA3C9_4408_4B30_BA72_F9C28742A8F5__I NCLUDED_)备注:矩阵高斯求逆矩阵的函数GaussInverse的nrutil.cpp文件和nrutil.h文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持. 文件在此省略。