第六讲:二维及三维空间的变换概念及其矩阵表示
- 格式:ppt
- 大小:1.98 MB
- 文档页数:12
几何变换与变换矩阵几何变换是计算机图形学中常用的一种技术,用于对二维或三维图形进行平移、旋转、缩放和剪切等操作。
这些操作可以通过变换矩阵来描述和计算。
本文将介绍几何变换的基本概念及其与变换矩阵的关系。
一、几何变换的基本概念1. 平移变换平移变换是将图形沿着指定的方向移动一定的距离。
在二维空间中,平移变换可以通过在原始坐标上加上一个向量来实现。
例如,将原始坐标(x, y)进行平移变换得到新的坐标(x', y'),可以表示为:x' = x + dxy' = y + dy其中,dx和dy分别为在x和y方向上的平移距离。
2. 旋转变换旋转变换是将图形绕指定的点或轴旋转一定的角度。
在二维空间中,旋转变换可以通过将原始坐标(x, y)绕着指定点(xc, yc)逆时针旋转θ角度得到新的坐标(x', y'),可以表示为:x' = (x - xc) * cosθ - (y - yc) * sinθ + xcy' = (x - xc) * sinθ + (y - yc) * cosθ + yc其中,(xc, yc)为旋转中心点,θ为旋转角度。
3. 缩放变换缩放变换是将图形沿着指定的方向进行放大或缩小。
在二维空间中,缩放变换可以通过将原始坐标(x, y)分别乘以指定的缩放因子sx和sy得到新的坐标(x', y'),可以表示为:x' = x * sxy' = y * sy其中,sx和sy分别为在x和y方向上的缩放因子。
4. 剪切变换剪切变换是将图形沿着指定的方向进行截取或拉伸。
在二维空间中,剪切变换可以通过将原始坐标(x, y)进行线性变换得到新的坐标(x', y'),可以表示为:x' = x + kx * yy' = y + ky * x其中,kx和ky分别为在x和y方向上的剪切因子。
二、变换矩阵的基本概念与计算方法变换矩阵是一种矩阵表示方法,用于描述几何变换的转换规则。

三维变换矩阵
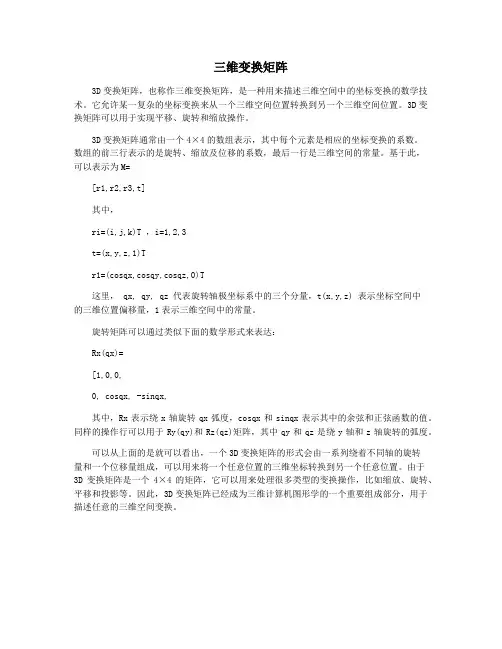
3D变换矩阵,也称作三维变换矩阵,是一种用来描述三维空间中的坐标变换的数学技术。
它允许某一复杂的坐标变换来从一个三维空间位置转换到另一个三维空间位置。
3D变换矩阵可以用于实现平移、旋转和缩放操作。
3D变换矩阵通常由一个4×4的数组表示,其中每个元素是相应的坐标变换的系数。
数组的前三行表示的是旋转、缩放及位移的系数,最后一行是三维空间的常量。
基于此,
可以表示为M=
[r1,r2,r3,t]
其中,
ri=(i,j,k)T ,i=1,2,3
t=(x,y,z,1)T
r1=(cosqx,cosqy,cosqz,0)T
这里, qx, qy, qz 代表旋转轴极坐标系中的三个分量,t(x,y,z) 表示坐标空间中
的三维位置偏移量,1表示三维空间中的常量。
旋转矩阵可以通过类似下面的数学形式来表达:
Rx(qx)=
[1,0,0,
0, cosqx, -sinqx,
其中,Rx表示绕x轴旋转qx弧度,cosqx和sinqx表示其中的余弦和正弦函数的值。
同样的操作行可以用于Ry(qy)和Rz(qz)矩阵,其中qy和qz是绕y轴和z轴旋转的弧度。
可以从上面的是就可以看出,一个3D变换矩阵的形式会由一系列绕着不同轴的旋转
量和一个位移量组成,可以用来将一个任意位置的三维坐标转换到另一个任意位置。
由于
3D变换矩阵是一个4×4的矩阵,它可以用来处理很多类型的变换操作,比如缩放、旋转、平移和投影等。
因此,3D变换矩阵已经成为三维计算机图形学的一个重要组成部分,用于描述任意的三维空间变换。
机器人学变换矩阵-概述说明以及解释1.引言1.1 概述机器人学是研究机器人的机械结构、运动规划、感知与控制等方面的学科。
作为人工智能和自动化领域的重要分支,机器人学在工业、医疗、农业、航空航天等领域有着广泛的应用。
本文旨在介绍机器人学中的一个重要概念——变换矩阵。
变换矩阵能够描述机器人在三维空间中的位置和姿态,是机器人学中的核心概念之一。
通过对变换矩阵的研究,可以帮助我们更好地理解机器人的运动规划、姿态表示以及感知与控制等问题。
在本文中,我们将从机器人学基础开始,介绍机器人学的概述和机器人的运动学知识。
然后,我们将详细讨论变换矩阵的应用,包括机器人姿态表示、运动规划以及感知与控制等方面。
最后,我们将介绍变换矩阵的计算方法,包括坐标系变换、旋转矩阵与平移矩阵以及变换矩阵的乘法与逆矩阵等内容。
通过本文的阅读,读者将能够了解机器人学中的变换矩阵的概念、应用和计算方法。
同时,我们也将对变换矩阵的未来发展进行展望,并总结本文的内容。
机器人学的研究对于推动自动化技术的发展具有重要的意义,希望本文能够为读者对机器人学的研究和应用提供一定的帮助和启示。
*(请注意,以上内容仅为示例,具体内容需要根据文章内容和结构进行编写)*文章结构是指文章按照一定的组织方式和逻辑顺序来呈现内容的方式。
本文的结构如下:1. 引言1.1 概述1.2 文章结构1.3 目的2. 正文2.1 机器人学基础2.1.1 机器人学概述2.1.2 机器人运动学2.1.3 机器人学中的变换矩阵2.2 变换矩阵的应用2.2.1 机器人姿态表示2.2.2 机器人运动规划2.2.3 机器人感知与控制2.3 变换矩阵的计算方法2.3.1 坐标系变换2.3.2 旋转矩阵与平移矩阵2.3.3 变换矩阵的乘法与逆矩阵3. 结论3.1 总结3.2 对变换矩阵的展望3.3 结束语本文的结构按照从前到后的逻辑顺序组织,首先通过引言部分引入了文章的背景和目的,然后在正文部分逐步介绍了机器人学的基础知识、变换矩阵的应用以及计算方法,最后在结论部分进行总结,并对变换矩阵的未来发展进行展望,并以结束语作为文章的结尾。
大一线性代数知识点概述线性代数是大一学习数学的一个重要领域,它主要研究向量空间、线性映射和矩阵等代数结构及其相互关系。
在大一学习线性代数的过程中,我们需要掌握一些基本的知识点和概念,本文将对这些知识点进行概述。
一、向量及其运算向量是线性代数中最基本的概念之一。
在大一线性代数中,我们主要学习二维和三维向量。
二维向量通常表示为(a,b),其中a和b分别表示向量在x轴和y轴上的分量。
三维向量通常表示为(a,b,c),其中a、b和c分别表示向量在x轴、y轴和z轴上的分量。
向量的加法和数乘运算是学习线性代数时必须掌握的基本运算。
二、矩阵及其运算矩阵也是线性代数中的重要概念。
矩阵是一个按照长方阵列排列的数表,在大一线性代数中,我们主要学习二维矩阵。
矩阵的加法、数乘和乘法是线性代数中常用的运算。
特别地,矩阵乘法是矩阵运算中最重要的一种运算,掌握好矩阵乘法的规则对于理解线性代数的许多概念和理论具有重要意义。
三、行列式行列式是线性代数中一种重要的数学工具,用于求解线性方程组的解以及判断矩阵的可逆性。
在大一线性代数中,我们主要学习二阶和三阶行列式的计算。
行列式的计算方法有多种,例如拉普拉斯展开、三角形形式等,理解和掌握这些计算方法对于解决实际问题具有重要意义。
四、向量空间向量空间是线性代数中一个基本的概念,它是由若干个向量组成的集合,并满足一定的条件。
在大一线性代数中,我们需要学习如何判断一个向量集合是否构成一个向量空间,以及如何求解向量空间的基、维数等问题。
了解向量空间的概念和性质有助于我们进一步学习线性代数的高级内容。
五、线性变换和特征值线性变换是线性代数中的一个重要概念,它是一个向量空间到另一个向量空间的映射。
在大一线性代数中,我们主要关注二维和三维空间中的线性变换。
线性变换的矩阵表示和线性变换的性质是学习线性代数中的重要内容。
特征值和特征向量是线性代数中另一个重要的概念,它们在矩阵对角化和求解差分方程等问题中具有重要的应用。
培养空间思维二维和三维形的转换培养空间思维——二维和三维形的转换空间思维是指人们在感知、理解和操作物体与空间时所使用的心智能力。
其中,二维和三维形的转换是空间思维中的重要环节。
在现实生活中,人们经常需要通过观察和操作物体来进行二维和三维形的转换,并将其应用于各种领域,如建筑设计、机械制图、艺术创作等。
因此,培养空间思维中的二维和三维形的转换能力对个人的发展具有重要意义。
一、理解二维和三维形的概念在进行二维和三维形的转换之前,首先需要明确二维和三维形的概念。
简单来说,二维形是指仅包含长度和宽度两个方向的平面形态,如平面上的几何图形;而三维形则在长度、宽度和高度三个方面具有形态特征,如立体图形和物体。
二、从二维形到三维形的转换将二维形转换为三维形是一项常见的任务。
例如,在建筑设计中,需要将平面图纸上的二维形态转化为实际的建筑物,这就要求设计师具备良好的二维到三维形的转换能力。
在这个过程中,可以通过以下几个步骤来完成:1. 理解平面图形的结构:首先要对平面图形进行仔细观察和分析,理解其结构和特点。
检查图形上的标记和尺寸,明确各个元素之间的关系。
2. 空间想象力的培养:通过模拟和想象将平面图形从纸上拆解,然后组合成立体形状。
这需要发展自己的空间思维能力和想象力,逐渐形成对空间布局的感觉。
3. 建立模型:为了更好地理解和操作二维到三维形的转换,可以使用纸张或者其他材料制作模型,直观地展示平面图形在三维空间中的形态。
4. 动手实践:在具备一定空间思维能力和理解的基础上,通过实际操纵物体,将平面图形转换为立体形状。
这个过程需要掌握一些工具和技能,如测量、剪切、粘贴等。
通过反复练习和不断的实践,将能够较快地完成从二维到三维形的转换,提高自己的空间思维能力。
三、从三维形到二维形的转换与从二维到三维形的转换相反,将三维形转换为二维形也是一个常见的任务。
在机械制图、艺术创作等领域中,通过将立体物体映射到平面上来表达其形态和结构。

二维矩阵变换可以理解为对二维空间中的点或形状进行旋转、缩放、平移等操作。
这些变换都可以通过对应的矩阵乘法来实现。
比如,一个2D旋转矩阵可以表示为:
[cos(theta) -sin(theta)
sin(theta) cos(theta)]其中theta是旋转的角度。
平移变换可以通过矩阵相加来实现,比如要把一个点向左移动x 单位,向上移动y单位,可以构造以下矩阵:
[1 0 -x
0 1 -y]
同样,缩放操作可以通过乘以一个特定的比例因子来实现。
比如要将一个点放大2倍,可以乘以以下矩阵:
[2 0 0
0 2 0]
以上内容仅供参考,建议查阅线性代数书籍获取更全面和准确的信息。
三元段线双元坐标变形矩阵
在计算机图形学和计算机辅助设计领域,三维段线,二维坐标,变换矩阵的概念至关重要。
要在二维空间中操纵和可视化三维物体,理解这些概念是必不可少的。
三维路段线是工程和建筑中用来代表通过3D对象的切口,以可视化其内部结构的概念。
这常用于建筑物的设计和建造,建筑师和工程师需要了解一个结构的内部布局。
通过定义一段线和切换3D模型,它们可以直观地看到内部组件,并计划安装管道和电气系统等公用事业。
另二维坐标被用来代表点在二维空间中的位置。
在计算机图形学中,这些坐标常用于定义像素在显示器或2D形状的顶点上的位置。
坐标一般以(x,y)对表示,其中x代表水平位置,y代表垂直位置。
理解二维坐标对于渲染二维图形和进行翻译,旋转,缩放等几何转换至关重要。
变换矩阵是一种数学工具,用于在2D和3D两个空间的点和形状上进行各种操作。
此矩阵可用于进行翻译,旋转,缩放,剪切等转换。
在计算机图形中,变换矩阵对于变换和操纵屏幕上的物体至关重要。
它们在计算机辅助设计(CAD)软件中也被用于操纵3D模型,并从不同角度对其进行可视化。
使用这些概念的一个现实世界实例是电子游戏开发领域。
在设计3D
电子游戏时,开发者需要定义三维对象及其内部结构,以及用于在屏
幕上渲染游戏的2D坐标。
他们还需要使用变换矩阵来操纵这些对象
以应对用户的相互作用,并创造现实的动画和效果。
三维路段线,二维坐标,变换矩阵等概念在工程,架构,计算机图形,电子游戏开发等领域至关重要。
了解和掌握这些概念对这些领域的专
业人员至关重要,以便创造准确和有视觉吸引力的设计和模拟。