模糊控制第三章解析答案课堂
- 格式:ppt
- 大小:1.77 MB
- 文档页数:89
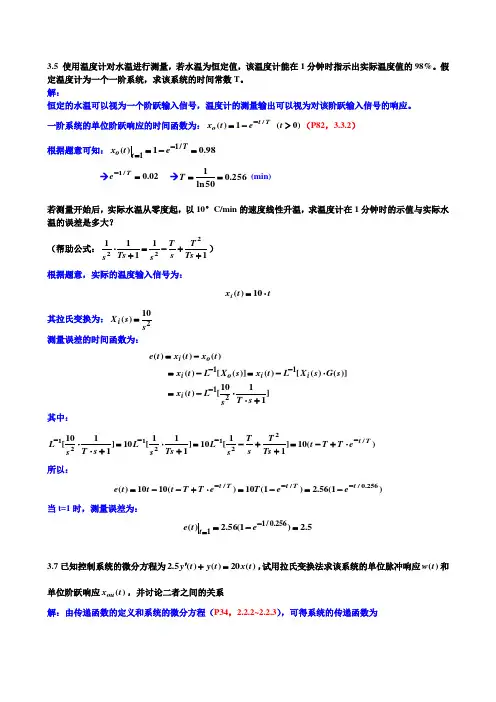
3.5 使用温度计对水温进行测量,若水温为恒定值,该温度计能在1分钟时指示出实际温度值的98%。
假定温度计为一个一阶系统,求该系统的时间常数T 。
解:恒定的水温可以视为一个阶跃输入信号,温度计的测量输出可以视为对该阶跃输入信号的响应。
一阶系统的单位阶跃响应的时间函数为:)0(1)(/>-=-t e t x T t o (P82,3.3.2) 根据题意可知:98.01)(/11=-=-=Tt o e t x→02.0/1=-T e →256.050ln 1==T (min)若测量开始后,实际水温从零度起,以10°C/min 的速度线性升温,求温度计在1分钟时的示值与实际水温的误差是多大?(帮助公式:11111222++-=+⋅Ts T s T sTs s ) 根据题意,实际的温度输入信号为:t t x i ⋅=10)(其拉氏变换为:210)(ss X i =测量误差的时间函数为:]1110[)()]()([)()]([)()()()(2111+⋅⋅-=⋅-=-=-=---s T sL t x s G s X L t x s X L t x t x t x t e i i i o i o i其中:)(10]11[10]111[10]1110[/2212121T t e T T t Ts T s T s L Ts s L s T s L ----⋅+-=++-=+⋅=+⋅⋅所以:)1(56.2)1(10)(1010)(256.0///t T t T t e e T e T T t t t e ----=-=⋅+--=当t=1时,测量误差为:5.2)1(56.2)(256.0/11=-=-=e t e t3.7已知控制系统的微分方程为)(20)()(5.2t x t y t y =+',试用拉氏变换法求该系统的单位脉冲响应)(t w 和单位阶跃响应)(t x ou ,并讨论二者之间的关系解:由传递函数的定义和系统的微分方程(P34,2.2.2~2.2.3),可得系统的传递函数为4.0815.220)()()(+=+==s s s X s Y s G 系统的单位脉冲响应为(P81)t e s L s X s G L t w 4.0118]14.08[)]()([)(---=⋅+==系统的单位阶跃响应为(P82):)1(20]4.011[4.08]14.08[)]()([)(4.0111t ou e s s L s s L s X s G L t x -----=+-=⋅+==比较)(t x ou 和)(t w ,有)(t w =)(t x ou' 即系统的单位脉冲响应等于系统的单位阶跃响应的微分。
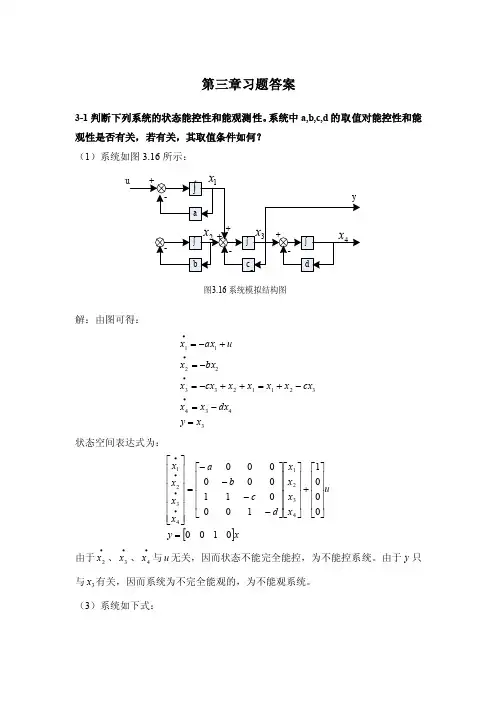
第三章习题答案3-1判断下列系统的状态能控性和能观测性。
系统中a,b,c,d 的取值对能控性和能观性是否有关,若有关,其取值条件如何? (1)系统如图3.16所示:图3.16 系统模拟结构图解:由图可得:343432112332211x y dx x x cx x x x x cx x bx x u ax x =-=-+=++-=-=+-=∙∙∙∙状态空间表达式为:[]xy ux x x x d c b a x x x x 0100000110001100000043214321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙由于∙2x 、∙3x 、∙4x 与u 无关,因而状态不能完全能控,为不能控系统。
由于y 只与3x 有关,因而系统为不完全能观的,为不能观系统。
(3)系统如下式:x d c y ub a x x x x x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∙∙∙00000012200010011321321 解:如状态方程与输出方程所示,A 为约旦标准形。
要使系统能控,控制矩阵b 中相对于约旦块的最后一行元素不能为0,故有0,0≠≠b a 。
要使系统能观,则C 中对应于约旦块的第一列元素不全为0,故有0,0≠≠d c 。
3-2时不变系统X y u X X ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=∙111111113113试用两种方法判别其能控性和能观性。
解:方法一:[]⎥⎦⎤⎢⎣⎡==⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--=2-2-112-2-11AB B M 1111,1111,3113C B A系统不能控。
,21<=rankM ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎦⎤⎢⎣⎡=44221111CA C N 系统能观。
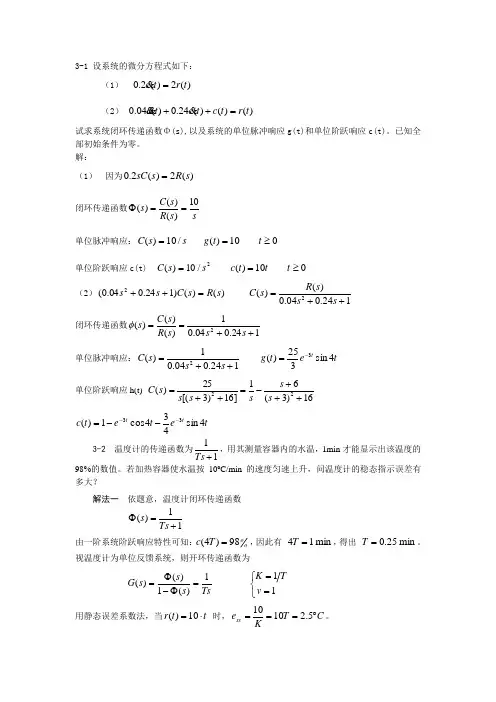
3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4s i n 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。

完美WORD 格式格式专业整理专业整理 知识分享知识分享3-1(1) )(2)(2.0t r t c =(2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==F 单位脉冲响应:s s C /10)(= 010)(³=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(³=t tt c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s f单位脉冲响应:124.004.01)(2++=s s s C t et g t4sin 325)(3-=单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s C t et et c tt4sin 434cos 1)(33----=3-2温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=F Ts s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=F -F =îíì==11vT K用静态误差系数法,当t t r ×=10)( 时,C T Ke ss°===5.21010。
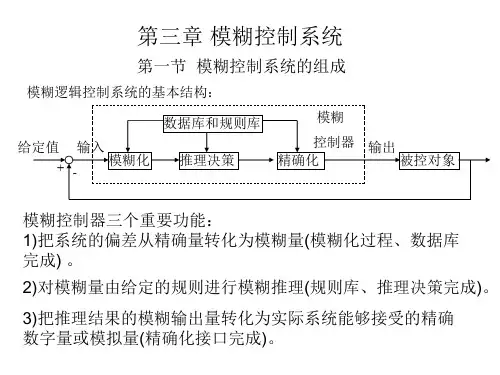
3—1 模糊逻辑控制器由哪几部分组成?各完成什么功能?答:模糊控制系统的主要部件是模糊化过程、知识库(数据库和规则库)、推理决策和精确化计算.1、模糊化过程 模糊化过程主要完成:测量输入变量的值,并将数字表示形式的输入量转化为通常用语言值表示的某一限定码的序数.2、知识库 知识库包括数据库和规则库。
1)、数据库 数据库提供必要的定义,包含了语言控制规则论域的离散化、量化和正规化以及输入空间的分区、隶属度函数的定义等。
2)、规则库 规则库根据控制目的和控制策略给出了一套由语言变量描述的并由专家或自学习产生的控制规则的集合。
它包括:过程状态输入变量和控制输出变量的选择,模糊控制系统的建立。
3、推理决策逻辑 推理决策逻辑是利用知识库的信息模拟人类的推理决策过程,给出适合的控制量。
(它是模糊控制的核心).4、精确化过程 在推理得到的模糊集合中取一个能最佳代表这个模糊推理结果可能性的精确值的过程称为精确化过程。
{模糊控制器采用数字计算机。
它具有三个重要功能:1) 把系统的偏差从数字量转化为模糊量(模糊化过程、数据库两块); 2) 对模糊量由给定的规则进行模糊推理(规则库、推理决策完成);3)把推理结果的模糊输出量转化为实际系统能够接受的精确数字量或模拟量(精确化接口)。
3—2 模糊逻辑控制器常规设计的步骤怎样?应该注意哪些问题? 答:常规设计方法设计步骤如下:1、 确定模糊控制器的输入、输出变量2、 确定各输入、输出变量的变化范围、量化等级和量化因子3、 在各输入和输出语言变量的量化域内定义模糊子集。
4、 模糊控制规则的确定5、 求模糊控制表3-3 已知由极大极小推理法得到输出模糊集为:0.30.810.50.112345C =++++-----。
试用重心法计算出此推理结果的精确值z. 重心法重心法 是取模糊隶属度函数的曲线与横坐标围城面积的重心为模糊推理最终输出值。
连续:0()()v VvVv v dvv v dvμμ=⎰⎰ 离散:101()()mkvkk mvkk v v v v μμ===∑∑采用离散重心法:101()()0.3(1)0.8(2)1(3)0.5(4)0.1(5)0.30.810.50.10.3(1)0.8(2)1(3)0.5(4)0.1(5)2.7=-2.7407mkvkk mvkk v v v v μμ===⨯-+⨯-+⨯-+⨯-+⨯-=++++⨯-+⨯-+⨯-+⨯-+⨯-=∑∑ 3—5 设在论域(){42024}e =--误差,,,,和控制电压{024,6,8}u =,,上定义的模糊子集的隶属度函数分别如图3—21、图3—22所示。