电动汽车级CAN总线 详细教程
- 格式:pdf
- 大小:9.87 MB
- 文档页数:52


CAN总线详细教程
1、CAN总线介绍
CAN(Controller Area Network)控制器区域网络,是一种汽车电子系统中的主要总线,可用于汽车中各个电子系统之间的通信。
它是一种标准化的总线,具有很高的时序要求,可以承载多种信息,灵活性好,安全性能好,适用于多种应用场景,如汽车、航空、工业控制等。
CAN总线是1981年开发出来的,由Robert Bosch GmbH开发,也是早期汽车电子系统中最主要的总线。
它是一种可靠性较高的通信协议,具有简洁可靠、发送数据率较高和发送范围较远等特点,可在多种应用场景中使用,且在电子领域受到了广泛的应用。
2、CAN总线特点
可靠性高:CAN网络具有多种保护机制,而且在进行数据传输时能够自动检测数据的完整性,这使得CAN网络在发送数据时的正确率更高,可靠性也比一般的网络要高。
数据传输速率高:CAN网络采用时间总线的形式,可以在一定的时间内完成数据传输,这样可以保证在传输时的速率更高。
发送范围较远:CAN网络支持的信号线长度非常的长,可以发送到大范围的地方,这样可以方便数据的传输。
总线简洁可靠:CAN网络只需要两根信号线,而且能够很好的保护数据的传输,所以在电子产品中被广泛的使用。
汽车级CAN总线详细教程_CAN总线是Controller Area Network的缩写,是一种用于传输数据和控制信号的串行总线通信协议。
它最初是由德国Bosch公司开发的,广泛应用于汽车电子系统中,如发动机控制单元、车载娱乐系统、仪表板等。
CAN总线具有高可靠性、高传输速率和灵活性等特点,逐渐成为汽车电子系统的主要通信协议。
它采用双线结构,即CAN_H和CAN_L两根差分传输线,可以有效抵抗噪声干扰,并能够进行远距离通信。
CAN总线的工作原理是基于CSMA/CD(载波监听多点冲突检测)协议,即多个节点共享同一个总线,只有当总线空闲时才能发送数据。
如果多个节点同时发送数据,就会引发冲突,此时需要进行碰撞检测和重传。
CAN总线分为两种工作模式:标准模式和扩展模式。
标准模式下,每帧数据最多包含11位标识符,扩展模式下可以达到29位。
标识符用于区分不同的消息,数据帧包含了数据位和控制位,控制位用于错误检测和纠正。
CAN总线的通信速率取决于波特率,常用的波特率有125kbps、250kbps、500kbps和1Mbps等。
较低的波特率可以保证更高的可靠性,而较高的波特率可以实现更快的数据传输速度。
在CAN总线中,每个节点都有一个唯一的地址,可以通过地址来发送和接收数据。
节点之间的通信可以是点对点的,也可以是广播的。
点对点通信是指一个节点向另一个节点发送数据,广播通信是指一个节点向所有其他节点发送数据。
CAN总线的数据传输是基于消息的,每个消息都有一个特定的优先级,优先级高的消息会被优先发送。
优先级通过标识符来确定,标识符的前面几位表示优先级。
CAN总线还支持错误检测和纠正机制,可以检测和纠正传输过程中出现的错误。
常见的错误包括位错误、帧错误和CRC错误等。
对于发现错误的节点,可以通过错误帧重传机制来进行纠正。
在实际应用中,CAN总线通常由一个主控节点和多个从属节点组成。
主控节点负责整个系统的控制和管理,并与从属节点进行通信。
汽车级CAN总线详细教程看过了很好第一部分:什么是CAN总线CAN(Controller Area Network)总线是一种用于车辆内部通信的串行总线系统。
它是一种多主机、实时、分布式通信系统,专门用于连接车辆中各种电子控制单元(ECU)之间的数据传输。
CAN总线的基本构成有两个部分,一是CAN控制器,负责发起消息和接收消息,二是CAN收发器,负责将数字信号转换为物理信号进行传输。
第二部分:CAN总线的特性和优势1. 带宽高:CAN总线的通信速率可以从几千bps到几百kbps不等,足以满足车辆内部各个电子控制单元(ECU)之间的数据传输需求。
2.抗干扰性强:CAN总线采用差分信号传输方式,能够有效抑制信号干扰,提高系统的可靠性和稳定性。
3.支持多主机:CAN总线支持多个ECU同时发送和接收数据,实现了分布式控制,增加了系统的灵活性和可扩展性。
4.实时性好:CAN总线具有很高的实时性能,能够在毫秒级的时间内完成数据传输,满足车辆内部各个系统之间的实时控制需求。
5.省电性高:CAN总线采用低功耗的差分传输方式,能够节省能量,并且具有很好的可靠性和稳定性。
6.故障诊断能力强:CAN总线具有自动故障检测和故障诊断功能,能够及时检测和排除系统故障,提高了整车的可靠性和安全性。
第三部分:CAN总线的应用领域CAN总线主要应用于车辆内部各种系统之间的数据传输,例如车载电子系统、发动机管理系统、传动系统、车身控制系统、底盘控制系统等。
通过CAN总线的连接,各个ECU之间可以实现数据的交换和共享,提高整车的性能和安全性。
第四部分:CAN总线的工作原理CAN总线的工作原理是基于基于CSMA/CD(Carrier Sense Multiple Access/Collision Detection)协议,即载波监听多路访问/冲突检测协议。
简单来说,发送数据的ECU首先会监听总线上的信号情况,如果检测到总线空闲,则可以发送数据。
CAN总线详细教程CAN总线是一种高速串行通信协议,广泛应用于自动化控制系统、汽车电子、工业设备等领域。
它具有高速传输、可靠性强和抗干扰能力强等优点。
本篇文章将介绍CAN总线的基本原理、通信方式、帧格式以及应用示例等内容。
一、CAN总线基本原理CAN(Controller Area Network)总线是一种多主机、多从机的通信系统,包括一个主控器和多个节点。
主控器负责决定总线上的通信速率和优先级,节点之间的通信通过总线上发送和接收的消息进行。
二、CAN总线通信方式1.基于广播的通信方式:主控器发送的消息会被总线上的所有节点接收。
节点根据消息的标识符判断是否需要对其进行处理。
2.基于点对点的通信方式:主控器发送的消息只会被消息的接收者节点接收。
消息的接收者是通过消息的标识符来确定的。
在实际应用中,一般会结合这两种通信方式来实现复杂的通信需求。
三、CAN总线帧格式1.数据帧:用于实际传输数据。
数据帧包括标识符、控制字段、数据字段和校验字段等。
2.远程帧:用于请求节点发送数据。
远程帧只包括标识符和控制字段。
标识符用于标识消息的类型和优先级,控制字段用于进行错误检测和数据传输的控制。
数据字段包含要传输的数据,校验字段用于检测数据传输过程中是否出现错误。
四、CAN总线应用示例以汽车电子控制系统为例,介绍CAN总线的应用。
在汽车上,CAN总线被广泛应用于发动机控制、刹车系统、空调系统等各种电子控制单元之间的通信。
通过CAN总线,这些电子控制单元可以实现信息的共享和协同工作。
例如,发动机控制单元可以将发动机的运行状态通过CAN总线发送给其他控制单元,供其他控制单元进行相应的控制。
刹车系统可以通过CAN总线获取发动机控制单元的信息,判断是否需要进行制动操作。
空调系统可以根据发动机控制单元的信息,调整空调的工作状态等。
总结:CAN总线是一种高速串行通信协议,具有高可靠性和抗干扰能力强的特点。
它采用差分传输技术,实现多主机、多从机的通信。
汽车CAN总线详细教程_精心编制_不可错过CAN总线是一种广泛应用于汽车领域的通信协议,它可以实现车内各个控制单元之间的数据交换和通信。
本篇文章将详细介绍CAN总线的原理、应用以及常见问题解决方法,帮助读者更好地理解和应用CAN总线。
一、CAN总线原理CAN(Controller Area Network)总线是一种串行通信协议,由国际标准化组织(ISO)制定。
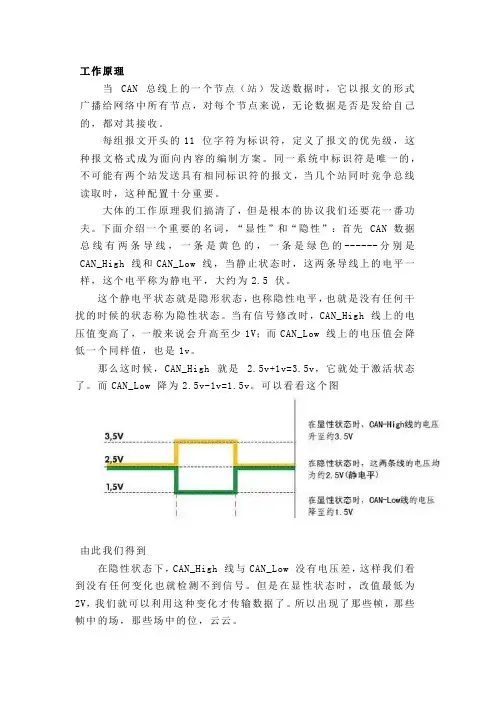
它采用了差分信号线,即CAN_H和CAN_L线,通过差值来表示数据位的状态,从而提高了抗干扰能力。
CAN总线主要包含两个基本元素:节点和总线。
在CAN总线中,每个节点都有唯一的地址,可以向总线上传输数据,也可以从总线上接收数据。
节点之间的通信是基于事件驱动的方式进行的。
当一个节点有数据要发送时,它会首先检查总线是否空闲,如果空闲则发送数据,否则等待。
二、CAN总线应用CAN总线在汽车领域应用广泛,其中最重要的应用之一是汽车电子控制单元(ECU)之间的通信。
通过CAN总线,不同的ECU可以传输各种信息,如引擎控制、传输控制、制动控制等。
这样可以实现各个系统之间的数据共享和协同工作,提高汽车性能和安全性。
此外,CAN总线还可以用于连接其他外设,如传感器、执行器等。
通过CAN总线,这些外设可以与其他ECU进行通信,实现数据的传输和处理。
三、CAN总线常见问题解决方法1.总线冲突:当多个节点同时发送数据时,可能会发生总线冲突。
解决方法是通过帧ID来确定优先级,具有较高优先级的节点可以打断正在发送数据的节点。
2.数据传输错误:由于CAN总线的差分信号线,抗干扰能力较强,但仍然有可能发生数据传输错误。
解决方法是使用CRC校验和来检测和纠正错误。
3.总线负载过高:当连接的节点数量过多或数据传输速率过高时,可能会导致总线负载过高。
解决方法是调整总线速率或分散数据传输。
4.总线错误报告:当一些节点发生错误时,可以通过CAN总线发送错误报告。
其他节点可以根据错误报告来采取相应措施。