增程式电动车分布式控制系统的研究_胡明寅
- 格式:pdf
- 大小:870.88 KB
- 文档页数:6

增程式电动车参数匹配与分析蒋建华;范港;张翀【摘要】针对增程式电动车研发中动力系统的参数匹配问题,以整车动力性和续航里程为设计目标,从电驱动系统、动力电池系统、内燃式增程器系统等方面出发,设计了增程式电动车动力系统参数,并以软件AVL CRUISE为仿真平台,采用增程器恒功率控制策略搭建了整车模型,验证了所设计的增程式电动车的整车动力性和续航里程.研究结果表明,车辆的最高车速、加速性能和爬坡性能满足车辆动力性能要求;车辆在10 km/h和15 km/h匀速工况下纯电动续航里程和增程模式的续航里程也满足车辆续航里程要求.【期刊名称】《机电工程》【年(卷),期】2016(033)003【总页数】5页(P373-377)【关键词】增程式电动车;动力系统;参数匹配;仿真【作者】蒋建华;范港;张翀【作者单位】浙江大学动力机械及车辆工程研究所,浙江杭州310007;浙江大学动力机械及车辆工程研究所,浙江杭州310007;浙江大学动力机械及车辆工程研究所,浙江杭州310007【正文语种】中文【中图分类】TP391.9目前纯电动车受到动力电池比能量小,价格高等因素的影响,并且充电设施复杂充电时间过长,就存在续航里程短不能满足远距离行驶的问题。
为延长EV的续航里程,将燃油发动机和电机组成的发电机作为增程器,与动力蓄电池一起构成动力源,是一种可供选择的方案。
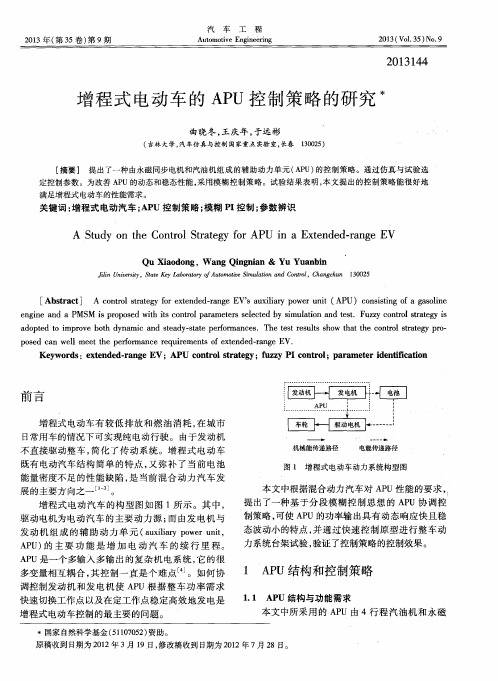
增程式电动车是一种以蓄电池为主动力的电动汽车,只是在车上装了另一个较小功率的车载发电机(增程器)并配置合适大小的油箱,以增加续航里程[1]。
增程式电动车跟串联式电动车的结构相似,发动机仅有的功能是发电。
在串联式混合动力车中,动力电池实际上起到平衡发动机输出功率和电动机输入功率的作用,使发动机一直工作在最佳稳定区,致使电池的电能主要来自发动机而且发动机基本在车辆运行时都在工作。
但是增程式电动车的设计目标是尽量使用电网给蓄电池充电的能量,当蓄电池的SOC低于限定限值后,发动机启动给蓄电池充电的同时又给车辆供给动力,所以发动机的启动频率很低。

增程式电动汽车辅助动力单元控制系统的研究的开题报告【摘要】电动汽车因其环保性和节能性优势,已成为未来汽车发展趋势。
然而,电动汽车的短续航能力限制了其在长途旅行中的应用。
为解决这一问题,增程式电动汽车应运而生。
本文将研究增程式电动汽车辅助动力单元控制系统,包括其系统结构、功能和设计思路,以及相关的技术路线和预期实现目标,为后续研究提供理论和实践指导。
【关键词】增程式电动汽车;辅助动力单元;控制系统;技术路线;预期实现目标【引言】随着环保意识的提高和人们对汽车燃油经济性和安全性的重视,电动汽车的出现逐渐占据了汽车市场的一席之地。
电动汽车的优势包括环保、节能、低噪音、低排放和运行成本低等方面。
但是,电动汽车的短续航能力限制了它在长途旅行中的应用。
为了解决这一问题,增程式电动汽车应运而生。
增程式电动汽车是一种通过电力驱动的辅助动力单元提供能量,延长电动汽车的续航里程。
对于增程式电动汽车而言,辅助动力单元是其关键组成部分,控制系统是实现电力驱动的前提,因此,增程式电动汽车辅助动力单元控制系统的研究具有重要意义。
本文将就此展开研究,包括其系统结构、功能和设计思路,技术路线以及预期实现目标。
【研究内容】1. 增程式电动汽车辅助动力单元的系统结构通过对增程式电动汽车辅助动力单元的相关资料分析,确定其系统结构,包括辅助动力单元、电池组、电机、传动装置和控制器等组成部分。
进一步探讨这些部分之间的联系和协作方式,以构建较为完备的增程式电动汽车辅助动力单元控制系统。
2. 增程式电动汽车辅助动力单元控制系统的功能基于增程式电动汽车辅助动力单元的系统结构,确定增程式电动汽车辅助动力单元控制系统的各种功能需求,包括最大功率输出、输出电压调节、续航里程预测和故障检测等。
并通过模拟和实验验证,评估控制系统的性能和可靠性。
3. 增程式电动汽车辅助动力单元控制系统的设计思路结合增程式电动汽车辅助动力单元的系统结构和功能需求,提出增程式电动汽车辅助动力单元控制系统的设计思路,包括硬件和软件设计。

分布式驱动电动汽车自适应巡航控制策略研究
胡胜利;张缓缓;江忠顺;常笑宇
【期刊名称】《机械科学与技术》
【年(卷),期】2024(43)2
【摘要】以分布式驱动汽车为研究对象,针对多目标协同的自适应巡航问题,应用非线性可变车头时距模型,对坡道、弯道工况设计了间距补偿策略,提高实际车间距离信号的准确性;综合考虑车辆行驶安全性,舒适性,节能性,设计了基于模型预测控制(Model predictive control,MPC)算法、分层控制的自适应巡航控制(Adaptive cruise control,ACC)系统。
基于变步长离散化的方法改进ACC系统多目标协同上层控制算法,在保证较长预测时域的基础上提高系统的精确性和实时性。
下层控制器中建立逆驱动系统模型、逆制动系统模型,制动/驱动切换逻辑,以车辆整体驱动效率最优为目标设计了期望力矩分配策略。
在CarSim/Simulink搭建仿真环境验证了所设计策略的有效性。
【总页数】11页(P325-335)
【作者】胡胜利;张缓缓;江忠顺;常笑宇
【作者单位】上海工程技术大学机械与汽车工程学院
【正文语种】中文
【中图分类】U469.72
【相关文献】
1.基于自适应Backstepping的分布式驱动电动汽车容错控制
2.分布式驱动电动汽车转矩自适应驱动防滑控制
3.轮毂电动机驱动电动汽车自适应巡航系统控制策略
4.基于多参数控制的分布式驱动电动汽车操纵稳定性控制策略研究
因版权原因,仅展示原文概要,查看原文内容请购买。

专利名称:用于电动汽车的自适应驾驶行为调节方法专利类型:发明专利
发明人:丁晨曦,胡明寅,何彬
申请号:CN201610268587.3
申请日:20160427
公开号:CN105711592A
公开日:
20160629
专利内容由知识产权出版社提供
摘要:本发明涉及电动汽车,具体提供一种用于电动汽车的自适应驾驶行为调节方法,旨在解决现有能量回收方式无法充分满足电动汽车续航要求以及充电或换电时间无法准确确定的问题。
为此目的,本发明的方法包括下列步骤:估算电动汽车的续航里程;通过GPS获取最近的充电桩位置或目的地信息;通过GPS获取电动汽车当前行驶的车道信息;以及基于电动汽车的续航里程、充电桩位置或目的地信息以及车道信息,使电动汽车选择性地进入强制自适应驾驶模式或可选自适应驾驶模式。
本发明的方法不但能避无法及时充电而抛锚或无法抵达目的地,而且还能在可行的情况下提醒驾驶员及时续航,从而不但节约电能并因此提高续航里程,还能避免因为缺电而抛锚,改善驾驶体验。
申请人:蔚来汽车有限公司
地址:中国香港中环夏悫道12号美国银行中心502室
国籍:CN
代理机构:北京英拓知识产权代理事务所(普通合伙)
更多信息请下载全文后查看。