小型机械臂
- 格式:docx
- 大小:324.30 KB
- 文档页数:3
幼儿园DIY机械臂制作案例共享在幼儿园教育中,机械臂制作是一项富有创意和趣味性的活动,不仅可以帮助幼儿培养动手能力和创造力,还可以引导他们对科技的兴趣。
下面,我将共享一则幼儿园DIY机械臂制作的案例,希望对大家有所启发。
1. 材料准备:- CARDBOARD纸板- 剪刀- 胶水- 小型电动机- 电池- 电线- 夹子- 摇杆- 螺丝2. 制作步骤:步骤1:将CARDBOARD纸板剪成四个大小相同的长方形,作为机械臂的四个“臂”。
步骤2:将这四块CARDBOARD纸板用胶水粘在一起,构成一个四段折叠的“臂”结构。
步骤3:接下来,利用螺丝将小型电动机安装在“臂”结构的底部,用电线连接电动机和电池。
步骤4:再将摇杆固定在“臂”结构的顶部,用夹子固定在所需位置。
步骤5:确定摇杆可以自由旋转,并确保电动机可以通过摇杆的运动控制机械臂的动作。
3. 操作方法:- 当电池通电后,通过摇动摇杆,控制电动机的正反转,从而实现机械臂的上下摆动和抓取动作。
通过这个简单的制作过程,幼儿不仅可以亲手动手制作一个机械臂,还可以对其原理和操作方法有所了解,这对他们的想象力和动手能力都是一种锻炼。
幼儿园DIY机械臂制作活动不仅可以增加幼儿对科学技术的兴趣,同时也可以培养他们团队合作和解决问题的能力。
希望更多的幼儿园能够引入这样的创意活动,让孩子们在玩中学,在学中玩,为他们的科学之路奠定良好的基础。
4. 效果展示:经过以上步骤的制作,孩子们终于完成了他们自己动手做的机械臂。
在制作完成后,孩子们通过摇动摇杆,激动地看着机械臂上下摆动,甚至能够通过摇杆的转动控制机械臂的抓取动作。
孩子们对自己亲手制作的成果非常激动和满足,他们互相展示着自己的作品,交流着制作的经验和技巧,展现出了积极的学习态度和团队合作精神。
5. 教育意义:这项机械臂制作的活动不仅仅是为了让孩子们亲手制作一件作品,更重要的是在这个过程中,他们能够学到许多知识和技能,培养出诸如动手能力、逻辑思维、创造力和团队合作等重要素质。
幼儿园机械臂DIY:创意科技手工制作指南一、概述幼儿园是孩子们认识世界、探索科学的重要阶段。
在这个阶段,通过一些简单的手工制作,可以帮助孩子们培养动手能力和创造力。
本文将以机械臂DIY为主题,介绍一种创意科技手工制作,旨在引导孩子们对科技的热情,同时培养他们的动手能力和逻辑思维。
二、机械臂的原理和功能机械臂是一种用于模拟人手臂动作的机械装置,其结构包括基座、臂体、关节和夹具等部件。
它可以完成抓取、转动、抬升等动作,是工业自动化中常见的设备。
通过DIY制作机械臂,不仅可以让孩子们了解机械原理,还可以锻炼他们的动手能力和创造力。
三、材料和工具准备1. 主要材料:纸板、塑料杯、吸管、小型电机、螺丝、螺母等。
2. 主要工具:剪刀、胶水、电动螺丝刀、钳子等。
四、制作步骤1. 制作机械臂的基座:使用纸板和胶水制作一个稳固的基座,并在上面固定一个塑料杯,作为机械臂的旋转轴。
2. 制作机械臂的臂体:使用纸板和塑料杯制作一个臂体结构,确保其轻巧灵活,并且可以通过吸管连接到基座上。
3. 安装电机和机械臂控制装置:将小型电机固定在基座上,并通过螺丝和螺母连接到臂体上。
接入电路板和控制开关,使机械臂能够实现抓取和抬升等动作。
五、实践与调试完成机械臂的组装后,可以连接电源,测试机械臂的各项功能。
通过调整电路板和控制开关,让机械臂能够灵活地完成抓取、转动和抬升等动作。
可以在机械臂上安装各种夹具,进一步增加其功能和趣味性。
六、个人观点与总结通过幼儿园机械臂DIY,不仅可以让孩子们在动手制作的过程中体验到科技的乐趣,还可以激发他们对科学的兴趣。
在这个过程中,孩子们不仅可以培养动手能力和创造力,还可以提前感受到科技带来的乐趣和便利。
我认为机械臂DIY是一项具有很高教育价值的手工制作活动。
结束语幼儿园机械臂DIY是一项寓教于乐的科技手工制作活动,既能培养孩子们的动手能力和创造力,又能激发他们对科学的兴趣。
希望通过本文的介绍,家长和老师们可以给予孩子们更多的支持和鼓励,让他们在快乐学习中茁壮成长。
一、前言为了提高我国机械工程领域的技术水平,培养具备实际操作能力和创新精神的机械工程师,我国高校普遍开展了机械工程项目实训。
本次实训旨在通过实际操作,使学生深入了解机械工程项目的全过程,掌握机械设计、制造、安装、调试等方面的技能,提高学生的综合素质。
二、实训目的1. 使学生掌握机械工程项目的整体设计思路和方法。
2. 培养学生运用所学知识解决实际问题的能力。
3. 提高学生的团队协作和沟通能力。
4. 增强学生的实践操作技能和创新能力。
三、实训内容1. 项目背景及需求分析本次实训项目为设计并制造一台小型机械臂。
机械臂具有以下功能:抓取、放置、旋转等。
项目需求如下:(1)机械臂的负载能力为2kg。
(2)机械臂的运动范围:水平方向±90°,垂直方向±45°,旋转方向±360°。
(3)机械臂的运动速度:水平方向±30°/s,垂直方向±15°/s,旋转方向±180°/s。
2. 机械臂的设计与制造(1)机械臂的结构设计:采用铰链式结构,由多个连杆组成,实现机械臂的运动。
(2)机械臂的驱动方式:采用步进电机驱动,实现精确的运动控制。
(3)机械臂的控制系统:采用PLC(可编程逻辑控制器)进行控制,实现机械臂的自动运行。
(4)机械臂的制造:采用3D打印技术制造机械臂的连杆,采用机加工技术制造机械臂的其他部件。
3. 机械臂的安装与调试(1)机械臂的安装:将机械臂的各个部件组装在一起,确保连接牢固。
(2)机械臂的调试:通过PLC编程,实现机械臂的运动控制,调整运动参数,确保机械臂的运动精度。
四、实训过程1. 项目启动:明确项目需求,确定项目团队,制定项目计划。
2. 设计阶段:进行机械臂的结构设计、驱动方式选择、控制系统设计等。
3. 制造阶段:采用3D打印技术制造机械臂的连杆,进行机加工制造其他部件。
4. 安装阶段:将机械臂的各个部件组装在一起,进行初步调试。
智行mini2小型服务机器人机械臂的抓取毕业设计
随着智能服务机器人的发展,机器人的机械臂已成为重要的组成部分
之一、机械臂的抓取技术是机器人能否完成任务的关键之一、本文以智行mini2小型服务机器人的机械臂抓取技术为研究对象,探讨其实现和优化
方法。
1.检测并定位目标物体:机器人需要实时检测并识别出目标物体的位置,确定抓取的精确位置和方向。
2.计算抓取姿态:抓取姿态是指机械臂在抓取目标物体时的姿态,需
要根据目标物体的形状大小和位置等信息进行计算,并确定最佳的抓取方式。
3.确定抓取策略:根据目标物体的重量、形状、大小、表面特性等信
息确定最佳的抓取方式。
4.安全抓取:机器人需要保障抓取物体的安全,防止物体掉落或损坏。
为了更好地完成以上任务,以下是机械臂抓取技术的实现和优化方法:
1.激光传感器定位:对于小型机器人,激光传感器可以较准确地定位
目标物体,提高机器人抓取的精度和效率。
2.抓取姿态预测算法:利用机器学习等算法,根据目标物体的几何形状、表面特性、摩擦系数等信息,预测最佳的抓取姿态,提高机器人抓取
的成功率。
3.反馈机制优化:引入力传感器等反馈机制,实时监测机器人抓取的
情况,及时调整抓取力度和位置,保障抓取过程中的安全性和稳定性。
机械臂抓取技术的实现和优化对于智能服务机器人的性能提升具有重要作用。
未来随着技术的发展,机械臂的抓取技术将会更加成熟可靠,服务机器人将能够更好地为人类提供服务。
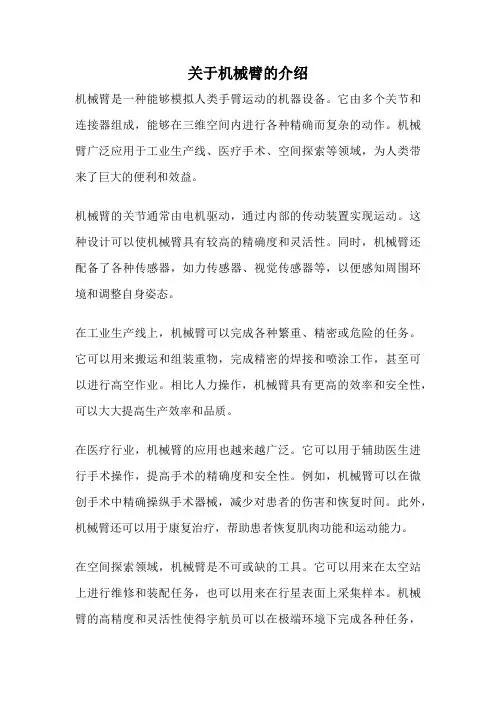
关于机械臂的介绍
机械臂是一种能够模拟人类手臂运动的机器设备。
它由多个关节和连接器组成,能够在三维空间内进行各种精确而复杂的动作。
机械臂广泛应用于工业生产线、医疗手术、空间探索等领域,为人类带来了巨大的便利和效益。
机械臂的关节通常由电机驱动,通过内部的传动装置实现运动。
这种设计可以使机械臂具有较高的精确度和灵活性。
同时,机械臂还配备了各种传感器,如力传感器、视觉传感器等,以便感知周围环境和调整自身姿态。
在工业生产线上,机械臂可以完成各种繁重、精密或危险的任务。
它可以用来搬运和组装重物,完成精密的焊接和喷涂工作,甚至可以进行高空作业。
相比人力操作,机械臂具有更高的效率和安全性,可以大大提高生产效率和品质。
在医疗行业,机械臂的应用也越来越广泛。
它可以用于辅助医生进行手术操作,提高手术的精确度和安全性。
例如,机械臂可以在微创手术中精确操纵手术器械,减少对患者的伤害和恢复时间。
此外,机械臂还可以用于康复治疗,帮助患者恢复肌肉功能和运动能力。
在空间探索领域,机械臂是不可或缺的工具。
它可以用来在太空站上进行维修和装配任务,也可以用来在行星表面上采集样本。
机械臂的高精度和灵活性使得宇航员可以在极端环境下完成各种任务,
推动人类对宇宙的探索。
机械臂是一种具有广泛应用前景的机器设备。
它的出现不仅提高了工业生产的效率和品质,也为医疗和空间探索等领域带来了巨大的进步。
相信随着技术的不断发展,机械臂将会在更多领域发挥重要作用,为人类创造更美好的未来。
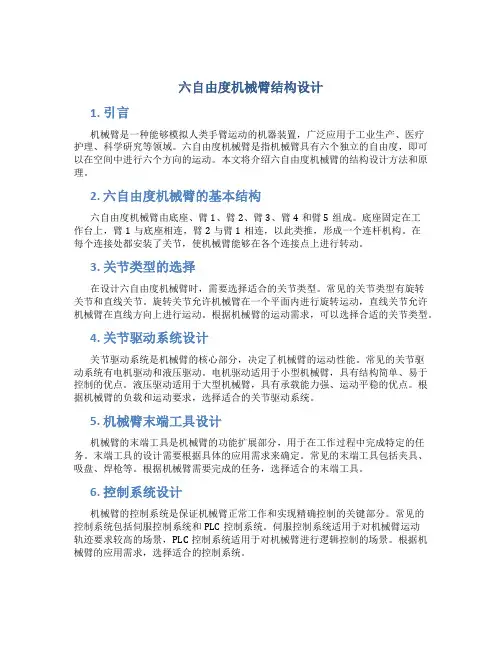
六自由度机械臂结构设计1. 引言机械臂是一种能够模拟人类手臂运动的机器装置,广泛应用于工业生产、医疗护理、科学研究等领域。
六自由度机械臂是指机械臂具有六个独立的自由度,即可以在空间中进行六个方向的运动。
本文将介绍六自由度机械臂的结构设计方法和原理。
2. 六自由度机械臂的基本结构六自由度机械臂由底座、臂1、臂2、臂3、臂4和臂5组成。
底座固定在工作台上,臂1与底座相连,臂2与臂1相连,以此类推,形成一个连杆机构。
在每个连接处都安装了关节,使机械臂能够在各个连接点上进行转动。
3. 关节类型的选择在设计六自由度机械臂时,需要选择适合的关节类型。
常见的关节类型有旋转关节和直线关节。
旋转关节允许机械臂在一个平面内进行旋转运动,直线关节允许机械臂在直线方向上进行运动。
根据机械臂的运动需求,可以选择合适的关节类型。
4. 关节驱动系统设计关节驱动系统是机械臂的核心部分,决定了机械臂的运动性能。
常见的关节驱动系统有电机驱动和液压驱动。
电机驱动适用于小型机械臂,具有结构简单、易于控制的优点。
液压驱动适用于大型机械臂,具有承载能力强、运动平稳的优点。
根据机械臂的负载和运动要求,选择适合的关节驱动系统。
5. 机械臂末端工具设计机械臂的末端工具是机械臂的功能扩展部分,用于在工作过程中完成特定的任务。
末端工具的设计需要根据具体的应用需求来确定。
常见的末端工具包括夹具、吸盘、焊枪等。
根据机械臂需要完成的任务,选择适合的末端工具。
6. 控制系统设计机械臂的控制系统是保证机械臂正常工作和实现精确控制的关键部分。
常见的控制系统包括伺服控制系统和PLC控制系统。
伺服控制系统适用于对机械臂运动轨迹要求较高的场景,PLC控制系统适用于对机械臂进行逻辑控制的场景。
根据机械臂的应用需求,选择适合的控制系统。
7. 结论本文介绍了六自由度机械臂的结构设计方法和原理。
通过选择适合的关节类型和关节驱动系统,设计合理的末端工具和控制系统,可以使机械臂实现各个方向的运动,并完成特定任务。
1 绪论1.1课题研究的目的和意义机器人是人类很早就梦想制造的、具有仿生性且处处听命于人的自动化机器,它可以帮助人类完成很多危险、繁重、重复的体力劳动。
机器人技术是现代科学技术高度集成和交融的产物,它涉及机械、控制、电子、传感器、计算机、人工智能、知识库系统以及认识科学等众多学科领域,是当代最具有代表性的机电一体化技术之一。
人类文明的发展、科技的进步已和机器人的研究、应用产生了密不可分的关系。
为了适应社会的需求,各院校都比较重视机器人技术和控制技术等课程在机械设计及其自动化专业的开设,使培养的学生懂得机器人设计方面的技术。
经过40多年的发展,现代机器人技术在工业、农业、国防、航空航天、商业、旅游、医药卫生、办公自动化及生活服务等众多领域获得了越来越普遍的应用。
机器人技术不断进步与创新,所到之处使整个制造业乃至整个社会都发生了和正在发生着翻天覆地的变化。
机器人是最具代表性的现代多种高新技术的综合体,它可以从某个角度折射出一个国家的科学水平和综合国力。
由于社会的需求,造就了一批从事设计、开发和使用机器人的高级人才。
而设计和开发的基础,是对机器人机械系统、感知系统和控制系统等的理解和掌握,才能较好的使用其中的资源来进行设计。
故此本文介绍了机器人设计的基本理论,讨论了机器人本体基本结构的相关内容,描述了机器人控制器和传感器等的基本原理,然后再介绍机器人轨迹规划和静力分析方面的知识,使学生既懂得怎样设计一个机器人,同时能熟练地运用此设计理论。
机器人技术是现代科学技术高度集成和交融的产物,计算机技术的不断肩部和发展使机器人技术的发展一次次达到一个新的水平。
机器人涉及机械、控制、电子、传感器、计算机、知识库系统以及认识科学等诸多学科领域,成为高科技中极为重要的组成部分。
人类文明的发展、科技的进步已和机器人的研究、应用产生了不可分的关系。
机器人技术是当代最具代表性的机电一体化技术之一。
机器人已广泛地应用于工业、国防、科技、生活等各个领域。
小型机械臂英语English:A small robotic arm, also known as a compact or mini robotic arm, is a multi-joint manipulator designed to perform a variety of tasks in a small workspace. These small robotic arms are often used in industries such as electronics manufacturing, medical devices assembly, and laboratory automation. They are typically equipped with advanced sensors, precision motors, and intelligent control systems to ensure precise and accurate movement. Despite their small size, these machines are capable of handling delicate and intricate tasks with high repeatability and precision. In addition, small robotic arms are often designed with a lightweight and compact structure, making them highly versatile and adaptable to different working environments.中文翻译:小型机械臂,又称紧凑型或迷你型机械臂,是一种多关节操作器,旨在在狭小的工作空间内执行各种任务。
这些小型机械臂通常用于电子制造、医疗器械组装和实验室自动化等行业。
制作一个有趣的DIY玩具玩具在孩子的成长过程中扮演着重要的角色。
它们不仅能够带来欢乐和娱乐,还可以激发孩子的创造力和想象力。
而制作一个有趣的DIY玩具,不仅能够让孩子们享受到创作的乐趣,还能提高他们的动手能力和解决问题的能力。
下面我要介绍的是一个简单而有趣的DIY玩具——机械手臂。
1. 材料准备首先,我们需要准备一些材料。
小木棒、彩色纸、橡皮筋、胶水和剪刀是必备的材料。
此外,你还可以准备一些小型家居用品,如塑料勺子、纸杯等,用来制作机械手臂的不同部分。
2. 制作机械手臂基座首先,我们需要制作机械手臂的基座。
取一块长方形的小木棒,用胶水将其固定在一块平面上,使其成为基座的一侧。
然后,取另一块小木棒,将其固定在基座的另一侧,使其成为基座的另一侧。
将两块小木棒之间的空间尽量拉大,以便后续安装机械手臂的其他部分。
3. 制作机械手臂的臂架接下来,我们需要制作机械手臂的臂架。
取两根小木棒,用胶水将其横放在基座的上方和下方,以形成一个平行的结构。
然后,取两根较长的小木棒,用胶水将其垂直固定在两根横木棒的中间位置,以形成臂架的竖直部分。
这样,一个简单的臂架就制作好了。
4. 添加机械手臂的关节现在,我们需要给机械手臂添加一些关节,以使其能够像真正的手臂一样活动。
取多根小木棒,固定在臂架上,用橡皮筋将它们连接起来。
这样,机械手臂就能够像真正的手臂一样活动。
5. 制作机械手臂的爪子最后,我们需要为机械手臂制作一个爪子。
取一个纸杯,将其剪成两半。
然后,用剪刀将纸杯的底部剪成锯齿状,以增加抓取物体的能力。
将纸杯的两个半部分用胶水粘在一起,然后将其固定在机械手臂的最后一个关节上。
通过以上步骤,我们成功制作了一个简单而有趣的机械手臂DIY玩具。
孩子们可以通过操作机械手臂的关节,模拟真实的抓取动作,抓取不同的物体,进而进行各种创新的游戏和挑战。
这个DIY玩具不仅能够提高孩子的动手能力,还能够锻炼孩子的观察力和逻辑思维能力。
孩子们可以通过不断调整杆件的长度和角度,尝试不同的抓取动作,从而学习到机械原理和物体抓取的方法。
机械手臂运动学分析与控制机械手臂从上个世纪50年代开始出现,经过多年的发展,已经成为自动化行业中必不可少的一项技术。
机械手臂是由众多执行器和传感器组成的复杂系统,其实现的主要功能是将任务空间中指令位置的物体移动到所需位置。
然而,在实际应用中,由于环境和物体的不同,机械手臂的运动必须按一定的方式控制,因此机械手臂的运动学分析和控制显得非常重要。
一、机械手臂的运动学分析机械手臂的运动学分析主要研究机械手臂在工作空间中的运动方式及其各个关节的旋转角度、速度和加速度等因素。
机械手臂的运动学分析涉及到多学科的知识,主要包括几何学、向量分析和矩阵代数等。
几何学方面,机械手臂可以看作是由多个链接和关节组成的一系列构型,每个构型的重要特征是长度和联接方式。
根据机械手臂的构型及其几何形状,可以推导出机械手臂运动的解析式,从而得到机械手臂的运动学模型。
向量分析方面,机械手臂的运动可用向量描述。
通常机械手臂的位置和运动可用三维向量表示。
对于链式机械臂,可以构成向量链模型。
采用向量链模型,可通过向量之间的线性组合表达机械手臂的运动学模型,并和座标变换相结合,得到机械手臂的位置解析式。
矩阵代数方面,机械手臂运动学的矩阵描述主要是为了便于计算和控制。
通过将构造模型中各个链接和关节的位移、旋转关系表达为矩阵形式,结合每个关节的角位移,可以计算出机械手臂的位置以及各个关节的坐标值,并用于机械手臂控制。
二、机械手臂的运动控制机械手臂的运动控制是指通过控制各个关节的运动状态,实现机械手臂在不同载体上的任务操作。
机械手臂控制包括开环控制和闭环控制两种。
开环控制即使在不考虑反馈信息的情况下,通过输入某个指令,控制机械臂达到预定位置。
开环控制的优点是简单易行,应用广泛,而且在一些不精确的应用中已经得到充分的证明。
但是缺点也显而易见,由于不考虑环境和物体的不同,造成了控制误差,机械手臂无法达到精确的移动,并且当机械手臂受到外力干扰时,控制误差将会更加显著。
机械手臂的组成机械手臂是一种能够模拟人类手臂运动的机器人,通常由控制系统、传感器、执行器和机械结构组成。
下面将详细介绍机械手臂的组成。
一、控制系统控制系统是机械手臂的大脑,它负责指挥机械臂的运动和控制各个执行器的工作。
一般来说,控制系统包括主控制器、伺服驱动器、编码器和通信模块等部分。
主控制器是机械手臂的核心部件,它负责处理传感器采集到的数据,并根据预设的程序指令来控制各个执行器的运动。
伺服驱动器则负责给每个执行器提供所需的电力,并且可以对其进行精确地调节。
编码器则用于测量每个执行器的位置和速度等参数,以便主控制器对其进行精确地掌控。
通信模块则用于与其他设备进行数据交换和信息传输。
二、传感器传感器是机械手臂获取外部信息和环境变化的重要工具。
常见的传感器包括力/扭矩传感器、视觉传感器、激光测距仪、压力传感器、温度传感器等。
力/扭矩传感器可以测量机械手臂在操作过程中的受力和扭矩情况,从而使机械手臂能够更好地适应不同的工作环境。
视觉传感器则可以捕捉周围物体的图像信息,以便机械手臂进行精确的定位和操作。
激光测距仪则可以用来测量目标物体与机械手臂之间的距离,以便实现更加精确的操作。
压力传感器和温度传感器则可以用来监控环境中的压力和温度变化,以便机械手臂做出相应的反应。
三、执行器执行器是机械手臂最为重要的组成部分之一,它们负责实现机械手臂各个关节的运动。
常见的执行器包括电动马达、液压马达、气动马达等。
电动马达通常被用于小型机械手臂中,它们具有响应速度快、精度高等优点。
液压马达则被广泛应用于大型机械手臂中,它们具有承载能力强、工作稳定等优点。
气动马达则主要用于需要快速移动的机械手臂中,它们具有响应速度快、噪音小等优点。
四、机械结构机械结构是机械手臂的身体部分,它由基座、臂架、关节和末端执行器等部分组成。
其中,基座是机械手臂的支撑部分,它负责将整个机械手臂固定在工作台上。
臂架则是机械手臂的主体部分,它负责连接各个关节并提供支撑。
产品概述RoboArm-II是博创RoboArm小型机械臂的升级产品。
它是一套具有6个自由度的典型串联式小型机械臂,并配有小型手爪式电动夹持器,可用于工业机器人原理及应用教学、空间机构学、机器人动力学与运动学教学,并可作为小型机器人的执行器。
RoboArm-II主体采用高强度铝合金结构,具有6个关节自由度,最大伸展长度0.5米,最大负载0.3kg,其各个关节采用数字式伺服电机控制,总线式通讯,各个关节均具有位置、速度、电流反馈。
具有完善的加减速控制和PID控制,参数可灵活调整,可轻易完成运动学正解、逆解实验,可进行人工示教。
其各个关节采用高速串行总线通讯,通讯速率达1Mbps。
供电系统为12V供电,控制器采用MultiFLEX2-AVR控制器,开发环境基于Windows 和创意之星机器人套件的架构,支持图形化编程、人工示教或C语言编程。
配有开发指南和实验教程,可由学生动手操作体验、完成工业机器人相关实训课程。
性能参数 项目参数 说明 展开尺寸(长宽高)300x250x650mm 材质高强度铝合金 重量机器人本体: 9.0kg (含底座) 控制柜: 5.5kg 末端典型负载0~0.3kg 关节伺服电机数字式一体化直流伺服电机 总线式通讯,速率1Mbps 电源容量12VDC/最大10A 含12V/10A 交流电源适配器 末端执行器小型电动夹持器 编程调试环境PC 机, NorthSTAR 图形化机器人开发环境 机器人控制器MultiFLEX2-AVR 12个I/O ,TTL 电平8个A/D 输入,0~5VDC可扩展额外20个自由度的 UART 总线接口扩展接口 2个RS-422总线接口通讯方式 USB 或RS-232接口文档和技术资料 DVD 光盘一张,含机器人实验指导手册、开发文档、源代码、DEMO 程序、电路图等技术资料关节参数: 关节 说明 极限运动行程最高速度 关节分布图 DOF1 腰部旋转 -150〫~+150〫200〫/s DOF2 肩部俯仰 -90〫~+90〫120〫/s DOF3 肘部俯仰 -90〫~+90〫150〫/s DOF4 腕部旋转 -150〫~+150〫200〫/s DOF5 腕部俯仰 -120〫~+120〫180〫/s DOF6 腕部倾动 -120〫~+120〫180〫/s 夹持器 开/合0~60mm 200mm/s 典型应用领域l机电一体化专业教学实验 l机器人运动学、动力学教学实验 l小型机器人平台执行器 l 工业机器人入门学习和体验实训。
圆柱坐标式机械臂机械臂作为现代工业自动化领域的重要设备之一,通过模拟人的手腕和手臂的动作,能够完成复杂而精确的工作任务。
机械臂按照其坐标系统的不同分为多种类型,其中圆柱坐标式机械臂是一种常见且具有广泛应用的机械臂类型。
1. 概述圆柱坐标式机械臂是一种以圆柱坐标系为基准的机械臂。
它由一根旋转基座和一个能够在垂直于基座旋转的臂组成。
在臂的末端通常还会有一个可进行垂直运动的夹具或工具。
2. 结构与工作原理2.1 结构圆柱坐标式机械臂的结构相对简单,主要由以下几个部分组成:•旋转基座:机械臂的底部,可以实现360度的旋转。
•臂:连接基座与工具的部分,通常由一至多个连接杆组成。
•关节:连接基座和臂之间的关节,可以实现关节的转动。
•工具:位于臂的末端,可以通过垂直运动实现对工作物体的夹持或操作。
2.2 工作原理圆柱坐标式机械臂的工作原理相对简单,通过控制旋转基座和关节的转动,使得臂的末端工具能够在三维空间中进行精确的定位和操作。
具体的工作流程如下:1.控制旋转基座:根据任务要求,通过控制旋转基座使得臂的工作范围覆盖整个圆柱状的工作空间。
2.控制关节:根据工作对象的位置和姿态要求,控制关节的转动,使得臂的末端工具能够到达指定的目标位置和姿态。
3.控制工具:根据工作对象的特性,通过控制工具的垂直运动,实现对工作对象的夹持、擒拿、切割等操作。
3. 应用领域圆柱坐标式机械臂广泛应用于多个领域,其中主要的应用领域包括但不限于以下几个方面:•电子制造业:用于电子组装、焊接、检测等工作任务。
•汽车制造业:用于汽车生产线上的零部件装配和焊接等工作任务。
•医疗行业:用于手术辅助、药品配送等工作任务。
•仓储与物流:用于垂直货架的搬运、堆叠等工作任务。
4. 优势与不足4.1 优势•灵活性高:圆柱坐标式机械臂能够在三维空间中进行精确的定位和操作,适用于多种复杂工作任务。
•工作范围广:通过控制旋转基座和关节的转动,可以覆盖大范围的工作空间。
现在很多工厂里面都会用到一些机械辅助设备,比如说机械臂。
像有些物品的空间位姿变化不是很复杂的情况下,一些简单的机械臂就可以完成了。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作、改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
为了抓取空间中任意位置和方位的物体,需有6个自由度。
自由度是机械手设计的关键参数越多、自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。
那机械臂有哪些种类呢?我们按驱动方式分可以分为以下几种:1.液压式。
这种机械臂通常是由液动机、伺服阀、油泵、油箱等部分组成驱动系统,由驱动机械臂的执行机构进行工作。
通常它具有很大的抓举能力,其特点是结构紧凑,动作平稳,耐冲击,耐振动,防爆性好,但对液压元件有较高的制造精度和密封性能要求,否则漏油将污染环境。
2.气动式。
其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便,动作迅速、结构简单、造价较低、维修方便。
但难以进行速度控制,气压不可太高,故抓举能力较低。
3.电动式。
电力驱动是目前机械臂使用得最多的一种驱动方式。
其特点是电源方便,响应快,驱动力较大,信号检测、传递、处理方便,并可以采用多种灵活的控制方案。
驱动电机一般采用步进电机,直流伺服电机以及交流伺服电机。
还有一些有着专门用途的机械臂如医用护理机械臂、航天用机械臂、探海用机械臂以及排险作业机械臂等。
芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
机械臂控制系统的设计1 引言近年来,随着制造业在我国的高速发展,工业机器人技术也得到了迅速的发展。
根据负载的大小可以将机械臂分为大型、中型、小型三类。
大型机械臂主要用于搬运、码垛、装配等负载较重的场合;中小型机械臂主要用于焊接、喷漆、检测等负载较小的场合。
随着国外工业机器人技术的不断发展,尤其是一些中小型机器人,它们具有体积小、质量轻、精度高、控制可靠的特点,甚至研发出更为轻巧的控制箱,可以在工作区域随时移动,这样大大方便了工作人员的操作。
在工业机器人的应用中最常见的是六自由度的机械臂。
它是由6个独立的旋转关节串联形成的一种工业机器人,每个关节都有各自独立的控制系统。
2机械臂硬件系统设计2.1 机械臂构型的选择要使机器臂的抓持器能够以准确的位置和姿态移动到给定点,这就要求机器人具有一定数量的自由度。
机器臂的自由度是设计的关键参数,其数目应该与所要完成的任务相匹配。
为了使安装在双轮自平衡机器人上的机械臂能够具有完善的功能,能够完成复杂的任务,将其自由度数目定为6个,这样抓持器就可以达到空间中的任意位姿,并且不会出现冗余问题。
在确定自由度后,就可以合理的布置各关节来分配这些自由度了。
由于计算数值解远比封闭解费时,数值解很难用于实时控制,这样,后3个关节就确定了末端执行器的姿态,而前3个关节确定腕关节原点的位置。
采用这种方法设计的机械臂可以认为是由定位结构及其后面串联的定向结构或手腕组成的。
这样设计出来的机器人都具有封闭解。
另外,定位结构都采用简单结构连杆转角为0或90°的形式,连杆长度可以不同,但是连杆偏距都为0,这样的结构会使推倒逆解时计算简单。
定位机构是涉及形式主要有以下几种:SCARA型机械臂,直角坐标型机械臂,圆柱坐标型机械臂,极坐标型机械臂,关节坐标型机械臂等。
SCARA机械臂是平面关节型,不能满足本文对机械臂周边3维空间任意抓取的要求;直角坐标型机械臂投影面积较大,工作空间小;极坐标方式需要线性移动,机械臂如需较大的工作空间,则臂长较长;和其他类型相比关节型机械臂在其工作空间内干涉是最小的,是一种较为优良的结构。
2019年12月第47卷第23期机床与液压MACHINETOOL&HYDRAULICSDec 2019Vol 47No 23DOI:10.3969/j issn 1001-3881 2019 23 024本文引用格式:朱鹏程,付乐,陈吉安,等.五自由度小型示教机械臂设计[J].机床与液压,2019,47(23):111-115.ZHUPengcheng,FULe,CHENJi an,etal.DesignofSmallTeachingRobotArmwithFiveDegreesofFreedom[J].MachineTool&Hydraulics,2019,47(23):111-115.收稿日期:2018-07-31作者简介:朱鹏程,男,博士,副教授,主要研究方向为机电液控制㊂E-mail:997881759@qq com㊂通信作者:付乐(1990 ),男,硕士研究生,研究方向为机电一体化㊂E-mail:997881759@qq com㊂五自由度小型示教机械臂设计朱鹏程,付乐,陈吉安,吴庆和(江苏科技大学机械工程学院,江苏镇江212003)摘要:设计了一种五自由度的机械臂,为了解决运动学分析结果不易验证以及在实际本体上实验成本较高的问题,制作了一套简易五自由度小型示教机械臂模型㊂通过D-H法对机械臂运动学进行分析,然后在MATLAB上执行运动学仿真,运用蒙特卡罗法对示教机械臂的工作空间进行求解,仿真结果验证了预期设计目标㊂此外,对机械臂轨迹规划㊁运动仿真进行实验验证,实际结果与运动学分析的结果保持一致㊂关键词:五自由度;机械臂;运动学分析;轨迹规划中图分类号:O311DesignofSmallTeachingRobotArmwithFiveDegreesofFreedomZHUPengcheng,FULe,CHENJi an,WUQinghe(SchoolofMechanicalEngineering,JiangsuUniversityofScienceandTechnology,ZhenjiangJiangsu212003,China)Abstract:Inordertosolvetheproblemthattheresultsofkinematicsanalysisarenoteasytoverifyandthetestcostishighontherealbody,asimplefivedegreesoffreedom(5-DoF)smallmodelforteachingtherobotarmisdeveloped.ThekinematicsoftherobotarmwereanalyzedbytheD-Hmethod,andthenthekinematicssimulationwascarriedoutusingMATLAB.BasedontheMonteCarlomethod,theworkingspaceoftherobotarmwassolved.Finally,thesimulationresultsverifiedtheexpecteddesigngoals.Inaddition,physicalexperimentsarecarriedoutonthetrajectoryplanningandmotionsimulationoftherobotarm.Theactualresultsalsoverifytheconsistencyofkinematicsanalysis.Keywords:Fivedegreesoffreedom;Robotarm;Kinematicsanalysis;Trackplanning0㊀前言伴随着相关计算机技术和其他科学技术的飞速发展,传统的机械系统早已经不能满足现在社会发展进步的需求,机械系统现朝着信息化和智能化的方向发展,最终会使新的事物出现来满足当代社会生产力的需求㊂机器人技术已经被应用,并已经运用到机械设备的众多领域,成为现代高科技研究和生产中的一个重要的组成部分㊂某些机器人需要执行动作:将对象从一个位置放置到另一位置,这一系列动作都要靠机械臂来完成㊂因此,‘中国制造2025“就指明需要大力推动重点领域突破发展就有机器人这一项[1]㊂1㊀方案设计文中以Arduino单片机与LabVIEW上位机为核心,构建机械臂控制系统,并开发相应的控制程序与应用程序㊂首先,对机械臂进行运动学和受力分析,再利用SolidWorks进行三维模型建立㊂然后采用3D打印机打印各个部件,进行组装成整机㊂并在Arduino单片机上编写控制程序,在LabVIEW上编写应用程序㊂最后对机械臂控制系统及其控制程序进行仿真和实验及调试,最终实现五自由度机械臂的基本功能㊂文中设计的机械臂类似于人体和人体手臂的结图1㊀机械臂主视图构,分为大臂㊁小臂㊁腰关节㊁肩关节㊁腕关节和手爪关节等结构[2]㊂此示教机械臂拥有5个自由度,能实现工作空间中的任何位姿㊂该示教机械臂由机座㊁大小臂㊁末端执行器和驱动装置等组成㊂如图1所示㊂2 运动学分析2 1㊀机械臂正运动学分析使用D-H法对示教机械臂建立数学模型[3],并进行正运动学分析,通过计算,验证所建立的示教机械臂的运动方程的正确性㊂这里通过用正运动学对示教机械臂进行分析㊂根据D-H建立坐标系要求,建立如图2所示的坐标系㊂图2㊀机械臂坐标系图机械臂连杆参数表如表1㊂表1㊀机械臂连杆参数连杆iθi/(ʎ)αi/(ʎ)ai/mmdi/mm限制角度范围/(ʎ)1(0)0083-90 +902(0)90000 1803(0)010400 1804(90)01480-90 +905(-90)90058-90 +90注:ai为沿xi轴,从zi移动到zi-1的距离;αi为绕xi轴,从zi旋转到zi-1的角度;di为沿zi轴,从xi-1移动到xi的距离;θi为绕zi轴,从xi-1旋转到xi的角度㊂按照D-H坐标法的杆与杆之间的相对变换通式:i-1㊀iT=cθi-sθi0αi-1sθicα1-1cθicα1-1-sα1-1-disα1-1sθisα1-1cθisα1-1cα1-1dicα1-10001éëêêêêêùûúúúúú可得各连杆变换矩阵如下:01T=cθ1-sθ100sθ1cθ100001830001éëêêêêêùûúúúúú,12T=cθ2-sθ20000-10sθ2cθ2000001éëêêêêêùûúúúúú,23T=cθ3-sθ30104sθ3cθ30000100001éëêêêêêùûúúúúú,34T=cθ4-sθ40148sθ4cθ40000100001éëêêêêêùûúúúúú,45T=cθ5-sθ50000-1-58sθ5cθ5000001éëêêêêêùûúúúúú,将连杆变换矩阵相乘,得机械臂的变换矩阵:05T=01T(θ1)ˑ12T(θ2)ˑ23T(θ3)ˑ34T(θ4)ˑ45T(θ5)为了验证机械臂变换矩阵05T的正确性,计算θ1=0ʎ,θ2=0ʎ,θ3=0ʎ,θ4=90ʎ,θ1=-90ʎ时的手臂变换矩阵05T,计算结果为05T=001104+148+581-100010830001éëêêêêùûúúúú由上述矩阵可知,坐标系5的原点在坐标系0(基坐标系)中的坐标为(310㊀0㊀83),与图2所示坐标系5原点所处极坐标系坐标一样㊂2 2㊀机械臂运动学仿真MATLABRoboticsToolbox是一个机器人仿真工具箱[4],采用该工具箱可以对文中示教机械臂的运动学和轨迹规划等进行仿真㊂借助MATLABRoboticsToolbox中的程序命令,可以生成该示教机械臂的运动学仿真模型,及其控制示教机械臂各关节角度的控制面板,通过调节示教机械臂的各个关节的角度参数,使示教机械臂达到指定的位姿㊂示教机械臂的运动学仿真模型和控制面板如图3所示㊂图3㊀控制面板和仿真模型图3中示教机械臂在初始状态的关节角度为θ=(0,0,0,90,-90),机械臂的末端的位置坐标为(310㊀0㊀83)㊂这与通过D-H法的坐标变换算法的㊃211㊃机床与液压第47卷结果相同,这一点也验证了正运动学理论公式推导的正确性㊂机械臂动力学通常是对机械臂中的力与运动关系的研究和分析㊂为了使机械臂的连杆实现加速运动,导致驱动器必须要具有足够大的力和力矩,来驱动机械臂连杆和关节㊂否则,机械臂将不会按照设定的速度快速运动㊂此外,还可能因为速度缓慢而达不到所期望的位置精度㊂由于所设计的机械臂为示教型,驱动器为舵机,力和力矩一定,暂不考虑动力学方面的问题㊂2 3㊀机械臂工作空间分析机械臂的工作空间是机械臂灵活性的重要指标㊂从理论上讲,机械臂的工作空间是一个近似球形的区域㊂它能够覆盖机械臂的位置,但是因为机械臂关节的运动范围有限,机械臂末端会有一些无法到达的工作死区,导致机械臂的工作范围和灵活性会受限㊂因此,分析机械臂的工作空间对于确定机械臂的安装位置和工作任务非常重要㊂对于机械臂工作空间的分析方法一般有解析法㊁描绘法㊁数值方法等㊂蒙特卡洛方法是一种广泛使用的数值计算方法,它通过重复随机抽样来解决数学问题㊂蒙特卡洛方法工作量少,计算速度快,可以避免计算复杂的数学推导过程㊂此外,还可以方便地利用计算机,实现图形的精确绘制㊂因此,蒙特卡洛方法适用于示教机械臂工作空间的计算求解[5]㊂在MAT⁃LAB环境下,蒙特卡罗法求解示教机械臂工作空间步骤如下:(1)首先对示教机械臂进行正运动学分析,并计算出示教机械臂末端相对基坐标的位置向量[px,py,pz]T;(2)再用MATLAB中rand()函数,随机生成示教机械臂各个关节变量定义区间的随机值㊂即关节变量=关节变量下限+(关节变量上限-关节变量下限)∗rand();(3)再将步骤(2)中生成的关节变量代入正运动学方程中,计算出示教机械臂末端的位置坐标点;(4)最后编写MATLAB程序,把求得的位置坐标点绘制出示教机械臂的工作空间的点云图㊂文中将产生100000个随机值,在MATLAB中运用蒙特卡罗法㊂如图4所示,绘制出示教机械臂末端的工作空间云图㊂从绘制的结果可以看出,示教机械臂的工作空间在x㊁y㊁z3个方向的大致范围在以半径为350mm的圆内㊂此外,还可以看出,示教机械臂末端基本上可以到达此圆内的所有空间㊂根据图中示教机械臂的工作空间,可以设计出其他类似机械臂,并运用相关知识,考虑机械臂的实际状况㊂并合理规划机械臂和相关配件的位置,可提高场地利用率㊂图4㊀机械臂工作空间的点云图3 机械臂轨迹规划与仿真3 1㊀机械臂轨迹规划机器人轨迹是指工业机器人在工作过程中的运动轨迹,即运动点的位移㊁速度和加速度[6]㊂在现在人工智能的研究范围中,轨迹规划实际上就是一种问题的求解技术㊂即从某个特定的初始状态出发,构造一系列操作步骤(也称算子),使之到达解决问题的目的状态㊂轨迹规划方法主要有关节插补法㊁直线插补法㊁圆弧插补法等㊂在对示教机械臂的关节空间做轨迹规划时,不需㊃311㊃第23期朱鹏程等:五自由度小型示教机械臂设计㊀㊀㊀要考虑直角坐标系空间中两个路径坐标点之间的轨迹形状,只需要关节角度的函数来描述机器人的轨迹㊂空间直线插补是已知直线始末2点位姿,求各轨迹中间点(插补点)的位姿㊂空间圆弧插补是已知该圆弧的圆心㊁起始角度㊁终点角度的情况下,求各个中间点(插补点)的位姿㊂3 2㊀机械臂轨迹仿真机器人的编程主要有3种方式:机器人语言编程㊁机器人示教编程㊁机器人离线编程㊂ABBRobotstudio就是专业的机器人仿真软件[7],其可以为用户实现编程自动化和智能化操作,并提高了生产效率㊂对于机器人自动化,这款软件都是一个不错的选择㊂使用ABBRobotstudio软件进行轨迹规划仿真,如图5所示㊂4㊀控制部分设计上位机有3种模式:初始化㊁自动模式㊁手动模式㊂上下位机采用典型的串口通信方式㊂串口是计算机上一种十分通用的设备通信协议㊂下位机Arduino也需要上传与LabVIEW通信的代码㊂最后,通过上位机控制下位机,下位机控制执行机构进行位置控制㊂其具体控制流程见图6㊂图5㊀机械臂ABB轨迹运动仿真图6㊀机械臂控制流程图上位机控制面板如图7所示㊂图7㊀上位机应用程序前面板编写5㊀仿真与实验为了对机械臂轨迹规划㊁运动仿真效果进行实验验证,设计了如图8(a)所示的机械臂实物运动模型,其生成轨迹角度如图8(b)所示㊂控制示教机械臂的各个关节角度,从而达到控制机械臂位置的目的㊂在对示教机械臂的关节空间做轨迹规划时,不需要考虑直角坐标系空间中两个路径坐标点之间的轨迹形状,只需要采用关节角度的函数来描述机器人的轨迹㊂㊃411㊃机床与液压第47卷图8㊀实物实验6㊀结论通过D-H法对机械臂运动学分析,然后使用MATLAB进行运动学仿真,运用蒙特卡罗法对示教机械臂的工作空间进行求解,其仿真结果与实验结果也验证了预期设计目标㊂此外,在实物模型实验中,由于执行机构为舵机及其PLA材料打印件自身特性等导致刚性不足,出现超调等现象㊂但此问题不足以推翻文中所述方法与理论的实际意义㊂文中设计五自由度示教机械臂在高校等实验室具有示教㊁轨迹规划㊁上下位机学习等功能,可用于教学㊂参考文献:[1]国务院.国务院关于印发‘中国制造2025“的通知[EB],国发 2015 28号,http://www.gov.cn,2005.[2]吴硕,吴桐,赵继忠.多自由度机械臂运动控制系统的设计与仿真[J].制造业自动化,2014(19):108-111.WUS,WUT,ZHAOJZ.DesignandSimulationwithMul⁃tipleDegreesofFreedomManipulatorMotionControlSys⁃tem[J].ManufacturingAutomation,2014(19):108-111.[3]莫毅.基于六自由度工业机器人的D-H模型及仿真分析[J].机床与液压,2017,45(11):64-68.MOY.D-HModelingandSimulationAnalysisBasedonSixDegreeofFreedomIndustrialRobot[J].MachineTool&Hydraulics,2017,45(11):64-68.[4]CORKEPI.ARoboticsToolboxforMATLAB[J].IEEERoboticsandAutomationMagazine,1996,3(1):24-32.[5]张建富,王健健,冯平法,等.并联机器人可操作度分析的蒙特卡罗方法[J].农业机械学报2013,44(7):269-273.ZHANGJF,WANGJJ,FENGPF,etal.MonteCarloMethodforManipulabilityAnalysisofParallelManipula⁃tors[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2013,44(7):269-273.[6]韩建海.工业机器人[M].2版.武汉:华中科技大学出版社,2012.[7]陈罗凤.浅谈ABB模拟与离线编程软件RobotStudio的使用技巧[J].机电信息,2017(15):172-173.[8]吕向锋,高洪林,马亮,等,基于LabVIEW串口通信的研究,国外电子测量术,2009,28(12):27-30.LVXF,GAOHL,MAL,etal.SerialCommunicationBasedonLabVIEW[J].ForeignElectronicMeasurementTechnology,2009,28(12):27-30.(责任编辑:卢文辉)(上接第168页)[3]HSIEHCF.DynamicsAnalysisofCycloidalSpeedReduc⁃ersWithPinwheelandNonpinwheelDesigns[J].JournalofMechanicalDesign,2014,136(9):091008.[4]KUMARN,KOSSEV,OLOYEDEA.ANewMethodtoEstimateEffectiveElasticTorsionalComplianceofSingle⁃stageCycloidalDrives[J].MechanismandMachineTheory,2016,105:185-198.[5]BLANCHEJG,YANGDCH.CycloidDriveswithMachi⁃ningTolerances[J].JournalofMechanismsTransmissionsandAutomationinDesign,1989,111(3):337-344.[6]YANGDCH,BLANCHEJG.DesignandApplicationGuidencesforCycloidDriveswithMachiningTolerances[J].MechanismandMachineTheory,1990,25(5):487-501.[7]YANHS,LAITS.GeometryDesignofanElementaryPlanetaryGearTrainwithCylindricalTooth⁃profiles[J].MechanismandMachineTheory,2002,37:757-767.[8]LAITS.DesignandMachiningoftheEpiCycloidPlanetGearofCycloidDrives[J].TheInternationalJournalofAdvancedManufacturingTechnology,2006,28(7/8):665-670.[9]陆岩.机器人用RV减速器传动误差研究与分析[D].大连:大连交通大学,2013.[10]潘洪杰.行星齿轮减速器系统传动精度的研究[D].天津:天津理工大学,2010.[11]聂松辉,颜彧.RV减速器输出机构扭转刚度分析计算[J].机械设计与研究,2014,30(4):24-26.NIESH,YANY.TheAnalysisandCalculationonTor⁃sionalStiffnessofOutputMechanisminRVReducer[J].MachineDesignandResrarch,2014,30(4):24-26.(责任编辑:卢文辉)㊃511㊃第23期朱鹏程等:五自由度小型示教机械臂设计㊀㊀㊀。
小型的机械臂工作原理机械臂是一种能够模拟人类手臂运动并执行各种任务的机械装置。
它可以在工业、医疗、军事等领域发挥重要作用。
机械臂的工作原理可以概括为传感器感知、计算控制和执行器执行三个步骤。
首先,机械臂需要通过各种传感器来感知外部环境和自身状态。
常用的传感器包括位置传感器、力传感器和视觉传感器等。
位置传感器用于测量机械臂的关节角度或末端执行器的位置,力传感器用于测量机械臂施加在工件或环境上的力,视觉传感器则用于获取周围环境的图像信息。
通过这些传感器,机械臂能够实时获取自身和外部环境的信息。
接下来,机械臂需要通过计算控制来生成运动轨迹和动作。
计算控制一般由上位机或嵌入式系统负责。
首先,机械臂会通过运动学计算推算出末端执行器的理想位置和关节角度。
运动学计算是根据机械臂的结构和关节约束等参数,通过数学公式进行推导得出的。
一般来说,机械臂的运动学问题可以用正解和逆解两个方面来描述。
正解问题是已知关节角度,求末端执行器位置的问题;逆解问题是已知末端执行器位置,求关节角度的问题。
计算控制还需要考虑机械臂的动力学特性,根据负载和工作条件等因素来生成不同的控制策略。
最后,机械臂需要通过执行器执行计算控制生成的运动轨迹和动作。
执行器一般由电机、减速器和驱动器等组成。
电机通过驱动器控制旋转角度和速度,驱动减速器实现机械臂的关节运动。
根据机械臂的结构和要求,执行器可以采用直线驱动、旋转驱动或组合驱动等方式。
执行器通常通过编码器来反馈实际位置和速度信息,以便计算控制进行修正和调整。
在执行动作时,机械臂的稳定性和精度对于各种应用场景都非常关键。
总的来说,机械臂的工作原理主要包括传感器感知、计算控制和执行器执行三个方面。
通过感知外部环境和自身状态,计算生成运动轨迹和动作,并由执行器执行,机械臂可以完成各种任务,实现精确的定位、抓取、搬运等工作。
机械臂在自动化生产和智能制造中具有广阔的应用前景,将成为未来工业发展的重要趋势之一。
我们传统印象中,工厂总是各种的大型机械的轰隆隆的景象,其实不然,现在很多的工厂是在做一些小型零部件的加工的,甚至说像现在的智能手机的加工,都是工厂的加工线上生产出来的。
而像这些产品本身的总量并不重,不需要大型的机械,但是它的加工非常的精密,需要很灵活的机械臂才可以,所以一些小型的灵活的机械臂就登场了。
那机械臂有哪些种类呢?我们按用途分可以分为以下几种:
⒈搬运机械臂。
这种机械臂用途很广,一般只需点位控制。
即被搬运零件无严格的运动轨迹要求,只要求始点和终点位姿准确。
如机床上用的上下料器人,工件堆垛机械臂,注塑机配套用的机械等。
2.喷涂机械臂。
这种机械臂多用于喷漆生产线上,重复位姿精度要求不高。
但由于漆雾易燃,一般采用液压驱动或交流伺服电机驱动。
3.焊接机械臂。
这是目前使用最多的一类机械臂,它又可分为点焊和弧焊两类。
4.装配机械人;这灯机械臂要有较高的位姿精度,手腕具有较大的柔性。
目前大多用于机电产品的装配作业。
还有一些有着专门用途的机械臂如医用护理机械臂、航天用机械臂、探海用机械臂以及排险作业机械臂等。
芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
芜湖大正百恒智能装备有限公司位于安徽省芜湖市,专业研发、制造、销售注塑机械手,车床、磨床、冲压上下料机械手及周边自动化设备。
产品广泛适用于基础工业,汽车零部件,电子通信,环保化粪池,检查井、垃圾桶、托盘、食
品包装,PET瓶坯,家电设备,光学制造等。
公司汇聚行业界经验丰富的技术精英及诚信专业销售团队,为您量身打造适合的自动化解决方案,我们深信优秀的产品品质是企业生存的基础,发展的前提。
一直采用世界先进的电器零部件,配合CNC精密加工,激光机切割,钣金加工,严格要求品质检验,以达到产品最佳效能。
更多详情请点击大正百恒智能查询,我们欢迎您!。