通用机械臂设计说明书
- 格式:doc
- 大小:1.19 MB
- 文档页数:27
目录1 绪论 (1)1.1前言 (1)1.2课题的来源与背景 (1)1.3研究的目的和意义 (2)1.4林业集材机的概述 (3)1.5国内外研究现状及发展趋势 (3)1.5.1 国内发展动态及研究现状 (3)1.5.2 国外发展动态及研究现状 (4)1.6论文主要研究内容 (5)2 机械臂设计理论 (7)2.1机械臂的组成及分类 (7)2.1.1 机械臂的组成 (7)2.1.2 机械臂的分类 (7)2.2机械臂的自由度及坐标形式 (8)2.2.1 机械臂的自由度 (8)2.2.2 机械臂的坐标形式 (8)3 集材机机械臂的总体设计 (10)3.1机械臂的设计参数 (10)3.2机械臂的结构形式 (10)3.3机械臂典型部件特点 (10)3.4机械臂的工作范围 (11)4 集材机工作装置的受力分析 (13)4.1集材机机械臂的工况分析 (13)4.2集材机机械臂的受力分析 (13)4.2.1 空载时各级臂架所受的弯矩 (13)4.2.2 抓举活立木时各级臂架所受弯矩 (14)4.3机械臂连接处的受力分析 (15)4.3.1 主臂铰接处分析 (15)4.3.2 副臂铰接处分析 (15)5 基于SOLIDWORKS集材机机械臂的造型 (17)5.1参数化设计与S OLID W ORKS软件 (17)5.1.1 参数化设计 (17)5.1.2 SolidWorks软件介绍 (17)5.2集材机机械臂零部件造型 (18)5.2.1 旋转基座的造型 (18)5.2.2 其它零部件的造型 (21)5.3集材机机械臂的虚拟装配 (22)6 集材机机械臂的有限元分析 (24)6.1S OLID W ORKS有限元分析模块及理论基础 (24)6.1.1 有限元法理论基础 (24)6.1.2 SolidWorks的Simulation模块 (24)6.2机械臂零部件的有限元分析 (25)6.2.1 有限元分析过程 (25)6.2.2 主臂的有限元分析结果 (26)6.2.3 副臂的有限元分析结果 (28)6.2.4 主臂结构优化 (29)6.2.5 副臂结构优化 (31)结论 (34)致谢 (35)参考文献 (36)中南林业科技大学本科毕业设计基于Solidworks集材机机械臂的设计1绪论1.1前言新中国成立以来,我们国家林业建设取得了巨大成就。
毕业设计设计题目棒料抓装机械手的设计学生姓名学号专业班级指导教师院系名称目录中文摘要 (3)英文摘要 (4)第一章绪论 (5)1.1 工业机械手 (5)1.1.1 工业机械手概述 (5)1.1.2 选题背景 (6)1.1.3 设计目的 (6)1.2 机械手的组成和分类 (7)1.2.1机械手的组成 (7)1.2.2机械手的分类 (10)1.3 国内外发展状况 (12)1.4 课题的主要要求 (13)第二章手部结构 (14)2.1 手部结构设计 (14)2.1.1概述 (14)2.2手部计算 (16)2.2.1 驱动力的计算 (16)2.2.2夹紧缸驱动力计算 (18)2.3 两支点回转式钳爪的定位误差的分析 (18)第三章腕部结构 (19)3.1腕部的结构设计 (19)3.1.1概述 (19)3.1.2 腕部的结构形式 (19)3.2手腕驱动力矩的计算 (20)第四章臂部的结构 (21)4.1 臂部设计的基本要求 (22)4.2 手臂的典型机构以及结构的选择 (23)4.2.1 手臂的典型运动机构 (23)4.2.2 手臂运动机构的选择 (23)4.3 手臂直线运动的驱动力计算 (23)4.3.1 手臂摩擦力的分析与计算 (23)4.3.2 手臂惯性力的计算 (25)4.3.3 密封装置的摩擦阻力 (25)4.4 液压缸工作压力和结构的确定 (26)第五章机身的设计计算 (29)5.1 机身的整体设计 (29)5.2 机身回转机构的设计计算 (30)5.3 机身升降机构的计算 (33)5.3.1 手臂偏重力矩的计算 (33)5.3.2 升降不自锁条件分析计算 (34)5.3.3 手臂做升降运动的液压缸驱动力的计算 (34)5.3.4 油缸结构尺寸的确定 (35)第六章液压系统 (37)6.1液压系统的设计 (37)6.1.1液压系统简介 (37)6.1.2液压系统的组成 (37)6.2机械手液压系统的控制回路 (37)6.2.1 压力控制回路 (37)6.2.2 速度控制回路 (38)6.2.3方向控制回路 (38)6.3 机械手的液压传动系统 (39)6.3.1上料机械手的动作顺序 (39)6.3.2自动上料机械手液压系统原理介绍 (39)6.4机械手液压系统的简单计算 (41)6.4.1 双作用单杆活塞油缸 (42)6.4.2油泵的选择 (45)6.4.3 确定油泵电动机功率N (45)第七章PLC控制回路的设计 (46)7.1电磁铁动作顺序 (47)7.2 根据机械手的动作顺序表 (48)7.3 PLC与现场器件的实际连接图 (49)7.4 梯形图 (50)7.5指令程序 (52)结论 (56)致谢 (57)参考文献: (58)棒料抓装机械手的设计摘要:当今社会信息化、科技化时代到来,机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,可以通过编程控制及检测反馈技术的成熟实现无人化操作,是当代研究十分活跃,应用日益广泛的领域。
机械臂的运动分析和模拟摘要本设计采用在基于Lisp编程语言的CAD下和MATLAB软件下进行的机械臂的程序化设计,将机械臂用CAD的形式绘制出来,并用Lisp语言进行编程将Auto CAD和MATLAB软件相互联系使用产生运动轨迹坐标数据和速度加速的曲线,便能清晰的将所设计机械臂的运动形式和运动轨迹的合理性表现出来,从而能够仅仅通过适当调整在Auto CAD中机械臂的各个构件或者运动轨迹就能得出设计者想要的最优化设计,这样能够在很大程度上减少我们人要花费很大精力进行大量复杂的工程计算,大大的提高了工作效率降低工作负担。
因此采用此种方法不管是在工程的设计上还是在大量的技术计算上发挥着至关重要的作用关键词:机械臂,仿真软件,模块化Mechanical arm's movement analysis and simulationABSTRACTThis design uses a Lisp-based programming language and MATLAB under the CAD software of the robot arm under the procedures of design, the robot arm using CAD Drawing out the form, and Lisp programming language and MA TLAB will be Auto CAD software contact trajectory coordinates the use of data and accelerate the speed of the curve, can be designed to be a clear movement of the robot arm trajectory forms and demonstrated the reasonableness and thereby be able to adjust only through the appropriate arm of Auto CAD in the various components or trajectory will be able to come to designers want to optimize the design, to a large extent this can reduce our people have to spend a great deal of energy to carry out a large number of complex engineering calculations, a significant increase in the workload and reducing efficiency. Therefore to apply this method, whether in the design of the project or in the calculation of a large number of technology plays a pivotal roleKEYWORDS: manipulator, simulation software, modular摘要............................................. - 1 -ABSTRACT.......................................... - 2 -前言............................................ - 2 -第一章概述....................................... - 4 -1.1 AutoCAD技术的实际应用领域与发展................ - 4 -1.2 Lisp语言简介及在仿真方法........................ - 6 -1.3 Matlab简介及仿真应用........................... - 7 -第二章机构运动分析................................. - 9 -2.1机构运动分析的必要性 ........................... - 9 -2.2运动分析的目的及基本方法........................ - 9 -2.3关于机构和杆组的基本知识....................... - 10 -2.4机构简图 ..................................... - 11 -第三章基于Lisp-Auto CAD下的机构运动实例........... - 14 -3.1平面机构运动分析.............................. - 14 -3.11运动分析的目的............................ - 14 -3.12程序说明.................................. - 14 -3.13模拟结果及分析............................ - 14 -3.2典型机构运动仿真实例.......................... - 15 -第四章基于Matlab-Auto CAD下的机械臂仿真........... - 17 -4.1机器人介绍.................................... - 17 -4.2机器人工作原理................................ - 18 -4.3机械臂介绍及运动分析 .......................... - 19 -4.31机械臂介绍................................ - 20 -4.32机械臂的运动分析.......................... - 22 -4.4机械臂的仿真程序设计 .......................... - 27 -第五章机械臂运动实例.............................. - 30 -总结........................................... - 33 -参考文献........................................ - 37 -源程序........................................... - 38 -仿真 (simulation) 是利用模型复现实际系统中发生的本质过程,并通过对系统模型的实验来研究存在的或设计中的系统。
)机械手臂课设说明书.目录1引言 (1)2 PLC的简介 (2)2。
1 PLC的产生 (2)2.2 PLC的定义和特点 (2)2。
2。
1 PLC的定义 (2)2.2.2 PLC的特点 (2)2。
3可编程控制器的主要性能指标 (3)2。
4 PLC系统的组成 (4)2。
4.1 PLC的硬件结构 (4)2.4。
2 PLC的软件 (4)2。
5 PLC的应用领域 (4)3方案设计 (6)3。
1 主程序设计 (6)3。
2 公用程序设计 (7)3.3 自动程序设计 (8)3.4 手动程序设计 (9)3.5 自动回原点程序设计 (9)4心得体会 (11)参考文献 (12)附录1 (13)附录2 (17)1引言机械手是工业自动化领域中经常遇到的一种控制对象。
近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。
机械手广泛地应用与锻压、冲压、锻造、焊接、装配、机加、喷漆、热处理等各个行业。
特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。
总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段.国内外都十分重视它的应用和发展。
可编程序控制器(PLC)是专为在工业环境下应用而设计的实时工业控制装置。
随着微电子技术、自动控制技术和计算机通信技术的飞速发展,PLC在硬件配置、软件编程、通讯联网功能以及模拟量控制等方面均取得了长足的进步,已经成为工厂自动化的标准配置之一[1]。
由于自动化可以节省大量的人力、物力等,而PLC也具有其他控制方式所不具有的特殊优越性,如通用性好、实用性强、硬件配套齐全、编程方法简单易学,因此工业领域中广泛应用PLC。
机械手在美国、加拿大等国家应用较多,如用果实采摘机械手来摘果实、装配生产线上应用智能机器人等。
我国自动化水平本身比较低,因此用PLC来控制的机械手还比较少。
2 PLC的简介2。
摘要随着自动化生产程度的提高,PLC 在生产控制系统中的应用也越来越广泛。
本设计是基于西门子公司S7-300可编程控制器,设计了机械手臂PLC控制的自动控制系统。
该工艺过程主要是完成对电机的控制。
系统主要由变频器、转台电机、液压泵电机、采样头电机、输送机、破碎机、缩分机、收集器以及控制系统组成。
通过对系统主电路、控制电路设计,给出了机械手臂自动控制系统完整的硬件接线图和流程图。
根据机械手臂的生产工艺要求,设计并使用STEP 7编制了一套适用于该生产工艺的梯形图。
利用Simens公司的Wincc完成了机械手臂的监控界面。
本设计过程中涉及较多的开关量输入输出点,故选用配置灵活的模块式结构PLC 以提高系统的可靠性与处理效率。
关键词: S7-300;机械手臂;自动控制AbstractWith the improvement of automatic production, the PLC application in production control system is also more and more broad. This design based on the Siemens S7-300 programmable controller, PLC controlled robotic arm designed automatic control system. The key is to complete the process of motor control. System mainly consists of inverter, turntable motor, hydraulic pump motor, the sampling hea d and the motor, conveyor, crusher, reduced extension, the collector and the control system.Through the design of system main circuit and control circuit, gives the complete hardware of the control system wiring diagrams and flow charts.According to the mechanical arm's technique of production's request, Design and use STEP 7 for the preparation of a ladder in the production process. Wincc by Simens company completed a mechanical arm monitoring interface.This design involves more switches quantity input output spot, the simulation quantity input output spot, therefore selects input output disposition nimble module type structure PLC to enhance the system the reliability and the processing efficiency.Key Words:S7-300;Mechanical arm;Automatic control目录第一章绪论 (1)1.1设计背景 (1)1.2设计目的 (1)1.3国内外研究现状和趋势 (2)1.4设计原则 (3)第二章系统方案设计 (4)2.1设计依据 (4)2.2各部分功能分述 (5)2.2.1 采样过程 (5)2.2.2 制样过程 (5)2.3控制方案的比较、论证和确定 (5)2.3.1 方案的比较 (5)2.3.2 方案论证及确定 (8)2.4系统结构图 (9)第三章系统硬件设计 (10)3.1设计依据 (10)3.2硬件设计 (10)3.3电动机选型 (14)3.4变频器设计 (15)3.4.1 概述 (15)3.4.2 变频器分类 (15)3.4.3 变频器的组成、工作原理及控制方式 (15)3.4.4 变频器选择 (18)3.5硬件地址配置 (20)3.6控制系统模块选择 (22)3.6.1 设计依据 (22)3.6.2 S7-300系列PLC组成 (23)3.6.3 S7-300PLC特点 (24)3.6.4 模块选择 (24)第四章控制系统软件设计 (32)4.1软件设计分析 (32)4.2系统流程图 (32)4.3STEP7编程过程 (37)4.3.1 建立工程 (37)4.3.2 硬件配置 (37)4.3.3 STEP 7编程 (38)第五章组态画面设计 (40)5.1组态软件概述 (40)5.2WINCC的介绍 (40)5.3画面组态 (40)5.3.1 建立主界面 (40)5.3.2 建立手动控制界面 (41)5.3.3 动作过程 (42)第六章 S7-300与WINCC通讯 (43)总结 (46)参考文献 (47)英文翻译原文 (48)英文翻译译文 (60)致谢 (69)附录 (70)第一章绪论1.1 设计背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
--前言机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。
它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。
机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。
本篇介绍的是用于物件装卸的机械手的设计,属圆柱坐标式机械手。
本篇根据设计机械手的一般程序,分八步详细地的介绍了用于物件装卸的机械手的设计的过程。
第一章设计任务书一.设计内容:1、机械手机构总体方案设计2、手架的结构设计3、液压、气压或电气系统设计机械手动作要求是:手架能作任何角度的伸缩和转动。
各动作由液压、气压驱动,电磁阀控制。
手架承重不小于10kg。
第二章设计任务分析以及总体方案机械手是一种模仿人手部分动作,按照预先设定的程序、轨迹或其它要求,实现抓取、搬运工件或者操纵工具的自动化装置。
一.机械手设计原则总体设计的任务:包括执行系统、驱动系统、控制系统的设计及参数计算,最后绘出草图。
总体设计后要进行各部件的强度、刚度、驱动力验算。
1、运动设计及确定主要要求手架能作任何角度的伸缩和转动2、驱动方式:液压、气压驱动该机械手是独立的自动化机械装置。
通用性高,机械手结构比较复杂。
手臂可作前后伸缩、上下升降和水平左右摆动三个动作,手臂可以绕Z轴转动360度4)按驱动方式分为联合驱动,电力驱动,液压驱动。
5)按臂力大小来说是中型机械手。
二、机械手分类1.按驱动方式分:液压式、气动式、机械式2.按适用范围分:专用机械手、通用机械手3.按运动轨迹控制方式分:点位控制、连续轨迹控制4.按臂部的运动形式分:直角坐标式、圆柱坐标式、球座坐标式、关节式三.机械手主要组成:机械手主要是由执行系统,驱动系统,控制系统三大部分组成。
1、执行部分执行系统是机械手的机械传动结构部分。
它包括手、手腕、手臂和机座等部件。

用户手册深圳市越疆科技有限公司Dobot MG400硬件使用手册 (DT-MG400-4R075-01)文档版本:V 1.1 发布日期:2021-04-06版权所有©越疆科技有限公司2021。
保留一切权利。
非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
免责申明在法律允许的最大范围内,本手册所描述的产品(含其硬件、软件、固件等)均“按照现状”提供,可能存在瑕疵、错误或故障,越疆不提供任何形式的明示或默示保证,包括但不限于适销性、质量满意度、适合特定目的、不侵犯第三方权利等保证;亦不对使用本手册或使用本公司产品导致的任何特殊、附带、偶然或间接的损害进行赔偿。
在使用本产品前详细阅读本使用手册及网上发布的相关技术文档并了解相关信息,确保在充分了解机械臂及其相关知识的前提下使用机械臂。
越疆建议您在专业人员的指导下使用本手册。
该手册所包含的所有安全方面的信息都不得视为Dobot的保证,即便遵循本手册及相关说明,使用过程中造成的危害或损失依然有可能发生。
本产品的使用者有责任确保遵循相关国家的切实可行的法律法规,确保在越疆机械臂的使用中不存在任何重大危险。
越疆科技有限公司地址:深圳市南山区留仙大道3370号南山智园崇文区2号楼9-10楼网址:目的本手册介绍了Dobot MG400机器人的功能、技术规格、安装指导、系统调试等,方便用户了解和使用协作机器人。
读者对象本手册适用于:•客户•销售工程师•安装调测工程师•技术支持工程师修订记录符号约定在本手册中可能出现下列标志,它们所代表的含义如下。
危险警告注意说明1. 安全注意事项 (1)1.1安全警告标志 (1)1.2通用安全 (1)1.3人身安全 (3)2. 产品简介 (4)2.1技术规格 (4)2.2机械臂尺寸 (5)2.3机械臂运动范围 (6)2.4末端法兰尺寸 (7)2.5末端负载说明 (8)2.6制动时间和和制动角度 (8)2.7回零校准说明 (8)2.8出厂姿态 (8)2.9产品特性 (9)2.9.1运动功能 (9)2.9.2坐标系 (12)2.9.3碰撞检测 (14)3. 电气特性说明 (15)3.1底座I/O接口说明 (15)3.2小臂接口说明 (15)3.3接口板 (16)3.3.1接口板说明 (16)3.3.2数字输入 (17)3.3.3数字输出 (18)4. 安装 (19)4.1安装使用环境 (19)4.2安装位置 (19)5. 维护与保养 (20)5.1安全指示 (20)5.2本体维护 (20)附录A伺服报警说明 (22)附录B控制器报警说明 (27)1.安全注意事项本章介绍了使用本产品时应注意的安全事项。
摘要机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
是一门涉及计算机科学、机械学、电子学、自动控制、人工智能等多个方面的学科,它代表了机电一体化的最高成就。
现今,机械手已经运用到各个领域,特别是在装配作业方面。
在装配机械手中,平面关节型装配机械手(即SCARA型)是应用最广泛的一种装配机械手。
本课题提出设计一种服务机械手,用于电子元器件等的装配,在分析国内外SCARA产品基础上,经过不同方案的比较,在确定了最优方案后通过认真的计算,仔细的校核,使设计结构简单、运行可靠、经济合理,能满足教学实验等需要,对于更好地熟悉和掌握相关课程具有重要的意义。
本文设计的是一种小型服务装配机械手,主要对这种机械手进行结构方面的设计。
本文设计的SCARA机器人具有以下特点:通用性好、体积小、重量轻、外形美观、成本低,对其本体的可行方案进行了充分的研究后,设计成具有多个自由度的结构,由机身、大臂、小臂及手腕组成,谐波减速器、齿轮、丝杠螺母等组成了机械手简单可靠的传动方案。
该电机的多个关节均采用步进电机驱动,具有控制简单、成本低的特点。
关键词:工业机械手自由度机器人AbstractRobot is a kind of science related to many other ones such as computer science, mechanism, electronics, automation control and artificial intelligence. Now, robots are used in many fields, especially in the aspect of assembly task. It represents the up-most level of mechatronics. Among assembly, plane articulated assemblyrobot (SCARA manipulator) is used most widely.This topic puts forward designing a kind of assemble robot, used for an assemble electronics component, after analy domestic and international SCARA, the surface of sphere SCARA etc. Through compare with different project. After making sure superior project, though the careful calculation and check.Make design with simple structure,credibility circulate, reasonable cost, can satisfy the teaching experiment etc..The presented SCARA manipulator in this paper is a pint-sized assembly robot, where the structure of SCARA manipulator is designed. The presented SCARA manipulator in this paper has following characters: good universality, small volume, light weight, beautiful appearance and low cost, so the structure of robot is fully considered which has four freedoms and is consisted of comprises base, big arm, small arm and wrist. The simple reliable transmission scheme of SCARA manipulator is composed of harmonic deceleration and gear wheel and feed screw. The four joints are all driven by stepping motors, which has the characters of simple control and low cost.Keyword: Industrial robots Freedom Robot目录摘要 (I)Abstract (II)第1章绪论 (1)第2章总体方案设计 (3)2.1 工业服务机器手的传动系统设计 (3)2.1.1机械手驱动系统的比较与选择 (3)2.1.2 传动机构的对比与分析 (5)2.2 机械手总体设计方案的比较确定 (6)第3章步进电机的选择及其校核计算 (11)3.1 主要技术参数确定 (11)3.2 各自由度步进电机的选择 (11)3.2.1第一自由度步进电机的选择 (12)3.2.2第二自由度步进电机的选择 (13)3.2.3第三自由度步进电机的选择 (13)3.2.4第四自由度步进电机的选择 (14)3.2.5第五自由度步进电机的选择 (14)3.3 第一自由度轴传动系统的计算与校核 (14)3.3.1第一自由度轴的等效转动惯量的计算 (14)3.3.2 步进电机1的校核 (15)3.4 第二自由度轴传动系统计算与校核 (15)3.4.1第二自由度等效转动惯量的计算 (15)3.4.2 步进电机2的校核 (16)3.5 第三自由度轴传动系统的计算与校核 (16)3.5.1第三自由度等效转动惯量的计算 (16)3.5.2 步进电机3的校核 (17)第4章系统整体的设计与校核 (18)4.1 同步齿形带传动设计 (18)4.1.1求出设计功率d P (18)4.1.2选择带的节距 (18)4.1.3确定带轮直径和带节线长 (18)4.1.4选择带长Lp (19)4.1.5近似计算中心距 (19)4.1.6进行标准带宽的选择 (20)4.2 各输出轴的设计 (21)4.2.1机身输出轴设计 (21)4.2.2 大臂输出轴设计 (21)4.2.3 大臂与小臂连接轴设计 (21)4.2.4 带轮轴设计 (21)4.2.5升降轴设计 (22)4.3 滚珠丝杠副校核 (23)4.3.1最大工作载荷计算 (23)4.3.2最大动负载C的计算与校核 (23)4.3.3传动效率计算 (23)4.3.4刚度计算 (24)4.3.5丝杠稳定性验算 (24)4.4机械手机身的设计 (25)4.5其他部分结构设计 (25)第5章控制系统设计 (27)5.1 机器人控制的特点 (27)5.2 机器人控制的分类 (28)5.2.1点位控制(PTP)机器人: (28)5.2.2连续轨迹控制(CP)机器人: (28)结论 (29)参考文献 (30)致谢................................................ 错误!未定义书签。
目录前言 (2)第一章绪论 (3)1.1 引言 (3)1.2 工业机械手的含义 (4)1.3 选题背景与意义 (4)1.4 工业机械手的组成 (6)1.5 工业机械手的发展及国内外发展趋势 (7)第二章三轴伺服驱动机械手结构设计方案 (12)2.1 机械手的设计方法 (12)2.1.1 机械手的选择与分析 (12)2.1.2 直角坐标机械手的设计方法 (13)2.2 机械手的结构设计 (18)2.2.1 机械手的总体设计 (18)2.2.2 机械手的传动部件设计 (19)2.2.3 机械手的臂部设计 (20)2.3 三轴伺服驱动机械手机构的特点 (21)第三章工业机械手的运动系统分析 (22)3.1 工业机械手的运动系统分析 (22)3.1.1机械手的运动概述 (22)3.1.2 机械手的驱动方式 (24)第四章三轴伺服驱动机械手零件的设计 (33)4.1 伺服电机的选择 (33)4.2 减速机的选择 ..................错误!未定义书签。
4.3 齿轮齿条的选择 (35)4.4 导轨的选择 (43)第五章结论 (45)致谢.............................错误!未定义书签。
参考文献.. (46)前言进入21世纪后,FANUC公司开发成功了配备有视觉传感器和力觉传感器的智能机械手。
到现在已拥有可搬运质量从 2 公斤到1.2 吨的种类丰富的商品系列。
随后,FANUC公司又开发了运用这一智能机械手的长时间连续机械加工系统机械手单元。
在整个加工工序中加工作业本身使用数控机床进行自动化加工已经非常普遍了。
但是,附带作业,毛比如在加工中心的夹具上进行加工材料装卸的作业,以及去毛刺边,清洗等作业中的很多部分,现在还是依靠人工来完成。
机械手单元使用智能机械手,不但实现了这些作业的自动化,而且在世界上最早实现了。
小时的长时间连续加工,现在在FANUC公司的工厂共运转着13 套这样的机械手单元。
题目: 通用机械臂机构设计目录1.绪论 (1)1.1 选题背景 (1)1.2 国内外研究现状和趋势 (1)1.3机械臂的组成 (2)1.4 设计目的 (3)1.5研究内容 (4)2.机械臂的总体设计方案 (4)2.1 机械臂总体结构的类型 (4)2.2机械臂主要部件及其运动 (5)2.3驱动机构选择 (6)2.4机械臂技术参数 (6)3.机械臂手部计算 (7)3.1手部设计基本要求 (7)3.2典型手部结构 (7)3.3机械臂手爪的设计计算 (7)4.腕部的设计计算 (12)4.1腕部设计基本要求 (12)4.2腕部结构 (13)4.3腕部的设计计算 (13)5.臂部设计以及有关计算 (17)5.1臂部设计的基本要求 (18)5.2手臂的典型机构及其选择 (19)6机座设计 (24)结论 (24)参考文献 (25)1.绪论1.1 选题背景机械臂是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械臂的发展,使得机械臂能更好地实现与机械化和自动化的有机结合。
机械臂能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
机械臂越来越广泛的得到了应用,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
目前,机械臂已发展成为柔性制造系统FMS 和柔性制造单元FMC中一个重要组成部分。
把机床设备和机械臂共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。
当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。
而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械臂的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
编号无锡太湖学院毕业设计(论文)题目:液压机械手的设计信机系机械工程及自动化专业学号:学生姓名:指导教师:(职称:副教授)2013年5月25日无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)液压机械手的设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:2013 年5 月25 日无锡太湖学院信机系机械工程及自动化专业毕业设计论文任务书一、题目及专题:1、题目液压机械手的设计2、专题二、课题来源及选题依据本课题是设计基于液压系统的机械手。
液压机械手是一种模仿人体上肢部分功能,按照预定要求输送工件或者握持工具进行操作的自动化技术设备,它可以代替手的繁重劳动,改善劳动条件,提高劳动生产率和自动化水平。
有着广阔的发展前途。
本课题通过机械手进行液压传动原理设计,实现机械手代替人力进行工作。
机械工业是国民的装备部,是为国民竞技提供装备和为人民生活提供耐用消费品的产业。
机械工业的规模和技术水品是衡量国家经济实力和科学技术水平的重要标志。
三、本设计(论文或其他)应达到的要求:1、收集相关资料,分析自己完成本课题还存在哪些方面的困难。
2、选定自己适合的制图软件,对选定的工具进行学习和具体实践。
3、对驱动油路进行仔细的研究,了解液压驱动原理,绘制油路图。
4、机械结构的分析,根据要求设计出合理轻便的机械手。
5、模拟调试后对整个液压机械手进行完善。
四、接受任务学生:班姓名五、开始及完成日期:自2012年11月12日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长〕签名研究所所长系主任签名2012年11月12日液压机械手是模仿人的手部动作,按照给定的程序、轨迹通过液压系统实现抓取和搬运操作的自动装置。
基于PLC的五轴教学机械手设计摘要本毕业设计要求学生掌握机械手或工业机械手的结构及工作原理,设计一关节型五轴教学用机械人的控制系统。
整个设计以控制为主,结构设计可参考同类机械人。
机械人共有五个关节动作和一个抓手动作,使用五个步进电机分别控制五个关节的动作,抓手的抓物动作由气阀控制。
控制箱部分由电源、可编程控制器、步进电机驱动模块及相应的按钮组成,具有手动和自动控制功能。
所设计机械人可进行简单机械手模拟控制的实验。
主要任务包括机械手总体设计、型式选择、机械手的I/O配置、设计机械手的流程图、设计机械手的梯形图、编制机械手的语句表、选择传感器等元件及设计系统图。
关键词:教学机械手,五自由度,步进电机,气阀控制,PLCPLC-based teaching of five-axismanipulator designAbstractDesign requirements of the graduate students to master the structureand working principle of manipulator or industrial robot , design acontrol system of the five-axis teaching type robot. The whole design isbase on control system.structural design can refer to the same robot. There are five robot joint action and a handle movement, the movement offive joints were controlled by five separate stepper motor , the grasping movements were controlled by the valve. Control box in part by the power supply, programmable controller, stepper motor drive module and the corresponding button of the function with manual and automatic control. Designed robot manipulator can be simple analog control experiment.The main tasks include robot design, type selection, the robot I /O configuration, the flow chart of robot design, the ladder diagram ofrobot design,the STL of robot design , select the design of sensor components and systems.Keywords: Teaching manipulator,Five degrees of freedom,Stepping Motor,Valve control, PLC目录绪论 (1)第一章机械手的总体设计 (3)1.1运动设计要求 (3)1.2驱动系统的选择 (3)1.3教学型五关节机械手机构简图 (3)第二章气动机械手的气缸设计 (5)2.1基座及连杆的结构 (5)2.1.1基座的结构 (5)2.1.2大臂的结构 (6)2.1.3小臂的结构 62.1.4手腕的结构72.2机械手手部的设计 (8)2.2.1根据课程选择手部类型 (8)2.2.2手部的设计 (8)2.3机械手的驱动与转动 (10)2.3.1手臂部分的传动方案 (11)2.3.2手指驱动缸的设计和选定 (14)第三章机械手的控制系统设计 (19)3.1步进电机控制系统的设计 (19)3.1.1PLC对步进电机的控制 (19)3.1.2脉冲分配器的选择 (20)3.1.3功率放大电路的设计 (22)3.2气动部分控制系统的设计 (23)3.2.1气动系统的介绍 (24)3.2.2气动系统的分类253.2.3气动控制方式253.2.4装置的技术要求273.2.5控制方式的选择273.2.6气动回路的设计273.2.7传感器的选择33 第四章机械手PLC程序设计 (37)4.1PLC概述 (37)4.2输入和输出点分配表 (37)4.3PLC软件程序 (39)4.3.1 PLC 梯形图 (39)4.3.2 PLC 语句表 (43)4.3.3机械手控制面板 (45)参考文献 (46)绪论一、机械手的研究现状热加工是高温、危险的笨重体力劳动,很久以来就要求实现自动化。
可移动式机械臂通用技术要求1 范围本文件适用于各种移动机械臂。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 12642-2013 工业机器人性能规范及其试验方法GB∕T 38326-2019 工业、科学和医疗机器人电磁兼容抗扰度试验GB/T 5226.1—2019 机械安全工业机械电气设备第 1 部分GB/T 191—2008 包装储运图示标志(ISO 780:1997,MOD)GB/T 2828.1—2012 计数抽样检验程序第1部分:按接收质量限(aql)检索的逐批检验抽样计划GB/T 4768—2008 防霉包装GB/T 4879—2016 防锈包装GB/T 5048—2017 防潮包装JB/T 8896—1999 工业机器人验收规则3 术语与定义下列术语和定义适用于本文件。
3.1可移动式机械臂 Mobile robot Manipulators一种能够在平面或空间中进行移动操作的机械臂。
3.2避障 Obstacle avoidance能够主动检测移动方向上的障碍物并能阻止机器人本体与其发生碰撞。
3.3碰撞 Collision描述机器人本体的一个或多个部位与外界发生接触或干涉。
3.4操作空间 Manipulation space可移动式机械臂在移动平台固定条件下,机械臂所能到达的最大工作区域。
3.5末端执行器 End effector安装于可移动式机械臂末端法兰,配合其对目标对象进行作业的装置。
3.6顺应机械臂与环境接触或发生碰撞时,移动机器人系统能够根据环境的约束自适应调节自身位置或姿态,顺应环境变化。
4 产品分类4.1 按移动平台型式分为:a)轨道式移动机械臂;b)轮履式移动机械臂;c)腿足式移动机械臂。
4.2 按照供电型式分为:a)有缆式;b)无缆式。
机械工程学院气动吸取型机械臂设计说明书设计题目:气动吸取型机械臂专业:机械设计制造及其自动化班级:机械电子姓名:杨宇奥指导教师:.-完成日期:2021年月日同济大学目录一.设计任务书............................................... - 1 -1.设计目的:............................................. - 1 -2.设计内容和要求......................................... - 1 -二.方案的分析论证........................................... - 3 -三.真空吸盘的动力学分析..................................... - 3 -四.真空吸盘的设计计算及选取................................. - 4 -五.真空发生器的选取......................................... - 5 -1.真空发生器简介:.......................................... - 5 -2.真空发生器的计算和选择:.................................. - 5 -六.电磁换向阀的选取......................................... - 7 -七.气源的选取.............................................. - 10 -八.电源的选取.............................................. - 13 -九.…...................................................... - 13 -一.设计任务书1.设计目的:为助残智能机器人的机械臂设计一可靠而能顺利实现抓取功能的气动吸取装置。
题目: 通用机械臂机构设计目录1.绪论 (1)1.1 选题背景 (1)1.2 国内外研究现状和趋势 (1)1.3机械臂的组成 (2)1.4 设计目的 (3)1.5研究内容 (4)2.机械臂的总体设计方案 (4)2.1 机械臂总体结构的类型 (4)2.2机械臂主要部件及其运动 (5)2.3驱动机构选择 (6)2.4机械臂技术参数 (6)3.机械臂手部计算 (7)3.1手部设计基本要求 (7)3.2典型手部结构 (7)3.3机械臂手爪的设计计算 (7)4.腕部的设计计算 (12)4.1腕部设计基本要求 (12)4.2腕部结构 (13)4.3腕部的设计计算 (13)5.臂部设计以及有关计算 (17)5.1臂部设计的基本要求 (18)5.2手臂的典型机构及其选择 (19)6机座设计 (24)结论 (24)参考文献 (25)1.绪论1.1 选题背景机械臂是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械臂的发展,使得机械臂能更好地实现与机械化和自动化的有机结合。
机械臂能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
机械臂越来越广泛的得到了应用,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
目前,机械臂已发展成为柔性制造系统FMS 和柔性制造单元FMC中一个重要组成部分。
把机床设备和机械臂共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。
当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。
而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械臂的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
因此,进行机械臂的研究设计是非常有意义的。
1.2 国内外研究现状和趋势目前,在国内外各种机器人和机械臂的研究成为科研的热点,其研究的现状和大体趋势如下:A.机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化;由关节模块、连杆模块用重组方式构造机器人整机。
B.工业机器人控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构;大大提高了系统的可靠性、易操作性和可维修性。
C.机械臂中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行决策控制;多传感器融合配置技术成为智能化机器人的关键技术。
D.关节式、侧喷式、顶喷式、龙门式,喷涂机械臂产品标准化、通用化、模块化、系列化设计;柔性仿形喷涂机器人开发,柔性仿形复合机构开发,仿形伺服轴轨迹规划研究,控制系统开发;E.焊接、搬运、装配、切割等作业的工业机器人产品的标准化、通用化、模块化、系列化研究;以及离线示教编程和系统动态仿真。
总的来说,大体是两个方向:其一是机器人的智能化,多传感器、多控制器,先进的控制算法,复杂的机电控制系统;其二是与生产加工相联系,满足相对具体的任务的工业机器人,主要采用性价比高的模块,在满足工作要求的基础上,追求系统的经济、简洁、可靠,大量采用工业控制器,市场化、模块化的元件。
1.3机械臂的组成机械臂由执行机构、驱动机构和控制机构三部分组成1.3.1执行机构(1)手部既直接与工件接触的部分,一般是回转型或平动型(多为回转型,因其结构简单)。
手部多为两指(也有多指);根据需要分为外抓式和内抓式两种;也可以用负压式或真空式的空气吸盘(主要用于吸附光滑表面的零件或薄板零件)和电磁吸盘。
传动机构形式教多,常用的有:滑槽杠杆式、连杆杠杆式、斜槭杠杆式、齿轮齿条式、丝杠螺母式、弹簧式和重力式。
(2)腕部是连接手部和臂部的部件,并可用来调节被抓物体的方位,以扩大机械手的动作范围,并使机械手变的更灵巧,适应性更强。
手腕有独立的自由度。
有回转运动、上下摆动、左右摆动。
一般腕部设有回转运动再增加一个上下摆动即可满足工作要求,有些动作较为简单的专用机械手,为了简化结构,可以不设腕部,而直接用臂部运动驱动手部搬运工件。
目前,应用最为广泛的手腕回转运动机构为回转液压(气)缸,它的结构紧凑,灵巧但回转角度小(一般小于 2700),并且要求严格密封,否则就难保证稳定的输出扭矩。
因此在要求较大回转角的情况下,采用齿条传动或链轮以及轮系结构。
(3)臂部手臂部件是机械手的重要握持部件。
它的作用是支撑腕部和手部(包括工作或夹具),并带动它们做空间运动。
臂部运动的目的:把手部送到空间运动范围内任意一点。
如果改变手部的姿态(方位),则用腕部的自由度加以实现。
因此,一般来说臂部具有三个自由度才能满足基本要求,即手臂的伸缩、左右旋转、升降(或俯仰)运动。
手臂的各种运动通常用驱动机构(如液压缸或者气缸)和各种传动机构来实现,从臂部的受力情况分析,它在工作中既受腕部、手部和工件的静、动载荷,而且自身运动较为多,受力复杂。
因此,它的结构、工作范围、灵活性以及抓重大小和定位精度直接影响机械手的工作性能。
(4)行走机构有的工业机械手带有行走机构,我国的正处于仿真阶段。
1.3.2驱动机构驱动机构是工业机械手的重要组成部分。
根据动力源的不同, 工业机械手的驱动机构大致可分为液压、气动、电动和机械驱动等四类。
采用液压机构驱动机械手,结构简单、尺寸紧凑、重量轻、控制方便。
1.4 设计目的本设计通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,完成一个特定功能、特殊要求的数控机床上下料机械臂的设计,能够比较好地体现机械设计制造及其自动化专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。
目前,在国内很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大、生产效率低。
为了提高生产加工的工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代自动化大生产,针对具体生产工艺,利用机器人技术,设计用一台装卸机械臂代替人工工作,以提高劳动生产率。
本机械臂主要与数控车床(数控铣床,加工中心等)组合最终形成生产线,实现加工过程(上料、加工、下料)的自动化、无人化。
目前,我国的制造业正在迅速发展,越来越多的资金流向制造业,越来越多的厂商加入到制造业。
本设计能够应用到加工工厂车间,满足数控机床以及加工中心的加工过程安装、卸载加工工件的要求,从而减轻工人劳动强度,节约加工辅助时间,提高生产效率和生产力。
1.5研究内容本文研究了国内外机械臂发展的现状,通过学习机械臂的工作原理,熟悉了搬运机械手的运动机理。
在此基础上,确定了搬运机械臂的基本系统结构,对搬运机械臂的运动进行了简单的力学模型分析,完成了机械手机械方面的设计工作(包括传动部分、执行部分、驱动部分)的设计工作。
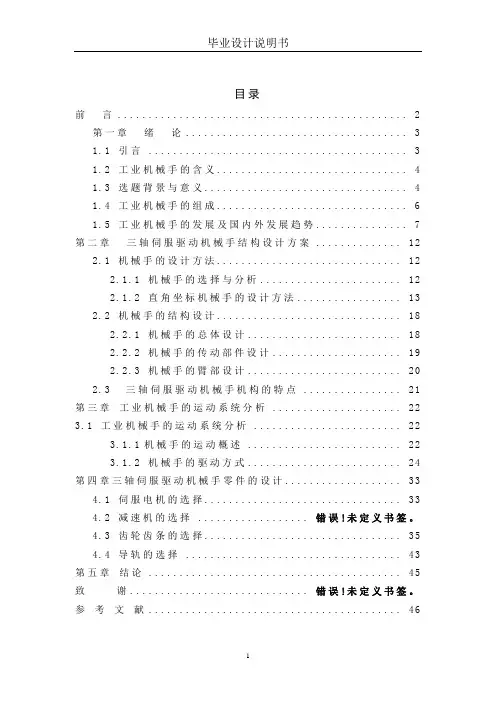
2.机械臂的总体设计方案2.1 机械臂总体结构的类型机械臂的结构形式主要有直角坐标结构,圆柱坐标结构,球坐标结构,关节型结构四种。
各结构形式及其相应的特点,分别介绍如下。
直角坐标机械臂结构直角坐标机械臂的空间运动是用三个相互垂直的直线运动来实现的,如图a2-1.。
由于直线运动易于实现全闭环的位置控制,所以,直角坐标机械臂有可能达到很高的位置精度(μm级)。
但是,这种直角坐标机械臂的运动空间相对机械臂的结构尺寸来讲,是比较小的。
因此,为了实现一定的运动空间,直角坐标机械臂的结构尺寸要比其他类型的机械臂的结构尺寸大得多。
直角坐标机械臂的工作空间为一空间长方体。
直角坐标机械臂主要用于装配作业及搬运作业,直角坐标机械臂有悬臂式,龙门式,天车式三种结构。
圆柱坐标机械臂结构圆柱坐标机械臂的空间运动是用一个回转运动及两个直线运动来实现的,如图2-1.b。
这种机械臂构造比较简单,精度还可以,常用于搬运作业。
其工作空间是一个圆柱状的空间。
球坐标机械臂结构球坐标机械臂的空间运动是由两个回转运动和一个直线运动来实现的,如图2-1.c。
这种机械臂结构简单、成本较低,但精度不很高。
主要应用于搬运作业。
其工作空间是一个类球形的空间。
关节型机械臂结构关节型机械臂的空间运动是由三个回转运动实现的,如图2-1.d。
关节型机械臂动作灵活,结构紧凑,占地面积小。
相对机器人本体尺寸,其工作空间比较大。
此种机械臂在工业中应用十分广泛,如焊接、喷漆、搬运、装配等作业,都广泛采用这种类型的机械臂。
关节型机械臂结构,有平面关节型和垂直关节型两种。
图2-1 四种机械臂坐标形式由要求可知本设计是一个用于搬运的机械臂,要有三自由度的空间位置改变、三自由度的姿态变化,为了满足设计要求,我们综合以上几种坐标形式的不同特点,最终选用平面关节型机械臂结构。
2.2机械臂主要部件及其运动在平面关节型机械臂的基本方案选定后,根据设计任务,为了满足设计要求,本设计关于机械臂具有6个自由度既:手抓张合;腕部翻转;腕部俯仰;腕部偏转;手臂升降;小臂回转;大臂回转7个主要运动。
本设计的机械臂由5个大部件和7个伺服电机组成:(1)手部,采用一个伺服电机,通过机构运动实现手抓的张合。
(2)腕部,采用三个伺服电机分别控制腕部的三种回转形式回转一定角度。
(3)臂部,采用伺服电机来实现手臂伸缩、回转。
(4)机身采用铸件稳定整个机构。
2.3驱动机构选择驱动机构是工业机械臂的重要组成部分, 工业机械臂的性能价格比在很大程度上取决于驱动方案及其装置。
根据动力源的不同, 工业机械臂的驱动机构大致可分为液压、气动、电动和机械驱动等四类。
由于低惯量、大转矩的交、直流伺服电机及其配套的伺服驱动器(交流变频器、直流脉冲宽度调制器)的广泛采用,这类驱动系统在机器人中被大量采用。
这类驱动系统不需要能量转换,使用方便,噪声较低,控制灵活。
大多数电机后面需安装精密的传动机构。
直流有刷电机不能直接用于要求防爆的工作环境中,成本上也较其他两种驱动系统高。
但因为这类驱动系统优点比较突出,因此在机器人中被广泛的使用。
2.4机械臂技术参数设计技术参数:抓重:100g (夹持式手部)自由度数:6个自由度座标型式:平面关节型工作空间:200×200×200mm手臂运动参数最大运动范围:大臂回转:180°小臂回转:180°手腕伸缩:220mm腕部翻转:180°腕部俯仰:180°腕部偏转:180°最大角速度180°/s最大升降速度:300mm/s3.机械臂手部计算3.1手部设计基本要求(1)应具有适当的夹紧力和驱动力。