圆柱坐标机械手结构设计概述
- 格式:doc
- 大小:738.50 KB
- 文档页数:72
圆柱坐标式机械手圆柱坐标式机械手是一种常见的工业机器人,通过使用圆柱坐标系来表达其运动。
它的设计基于圆柱坐标系的特性,具有灵活性和适应性,能够在多种工业任务中发挥重要作用。
概述圆柱坐标系是一种三维坐标系,其中X轴与水平方向对齐,Y轴垂直于X轴并指向上方,Z轴与地面平行。
与笛卡尔坐标系不同,圆柱坐标系使用极坐标来表达位置,其中角度θ表示与X轴的夹角,半径r表示与原点的距离,高度z则表示垂直于XY平面的距离。
结构与动作圆柱坐标式机械手通常由基座、臂和末端执行器组成。
基座是机械手的底部支撑结构,臂负责连接基座和末端执行器,而末端执行器则是机械手的功能部分,用于执行各种任务。
机械手的关节通常由电动机驱动,使其能够完成各种运动。
与笛卡尔坐标系的机械手不同,圆柱坐标式机械手的关节通常沿着r、θ和z轴进行旋转和移动。
应用领域圆柱坐标式机械手广泛应用于各种工业领域,例如自动化生产线、物料搬运、装配和焊接等。
其主要优势在于适应性和灵活性,能够执行各种复杂任务。
以下是圆柱坐标式机械手的一些具体应用领域:1. 自动化生产线圆柱坐标式机械手能够在自动化生产线上完成物料搬运、装配和包装等任务。
其可以通过精确的控制和坐标定位来提高生产效率,并减少人工操作的风险。
2. 焊接与切割机械手在焊接和切割领域中发挥着重要作用。
圆柱坐标式机械手能够以精确的姿态和速度完成复杂的焊接和切割任务,提高生产效率和产品质量。
3. 实验研究科研领域中也广泛使用圆柱坐标式机械手进行实验研究。
其能够准确控制实验参数,提供稳定的实验环境,并帮助科学家进行数据收集与分析。
未来发展随着科学技术的进步,圆柱坐标式机械手在未来将继续发展和改进。
以下是一些可能的发展方向:•智能化:机械手可以与其他智能设备和系统进行交互,实现更高级别的自动化和人工智能应用。
•灵活性:机械手可以应对不同的任务和环境,具备更大的工作范围和适应能力。
•精确度:通过改进传感器和控制算法,机械手可以实现更高的精确度和稳定性。
圆柱坐标式机械手课程设计引言随着现代工业的发展,机械手作为一种非常重要的自动化装备,在生产线上发挥着至关重要的作用。
而圆柱坐标式机械手作为机械手的一种常见类型,具有较高的灵活性和适应性,并广泛应用于各个工业领域。
本文将对圆柱坐标式机械手的课程设计进行详细介绍。
设计目标本课程设计旨在帮助学生深入了解圆柱坐标式机械手的基本原理和工作方式,并通过实际操作来掌握机械手的控制技术和编程方法。
具体设计目标如下:1.了解圆柱坐标式机械手的结构和工作原理;2.掌握机械手的基本编程语言和指令集;3.能够实现机械手的基本动作控制;4.能够进行机械手的编程调试和故障排除;5.能够应用机械手完成简单的操作任务。
设计步骤步骤一:理论学习在进行实际操作之前,学生首先需要对圆柱坐标式机械手的结构和工作原理进行学习。
教师可以进行课堂讲解,介绍机械手的各个组成部分及其功能,并对机械手的工作原理进行详细说明。
此外,还可以通过实例或案例分析,让学生更好地理解机械手在实际生产中的应用。
步骤二:控制系统学习圆柱坐标式机械手的控制系统是实现机械手动作控制的核心。
学生需要学习机械手控制系统的基本原理,如传感器的应用、控制算法的设计等。
此外,还需了解机械手的编程语言和指令集,包括机械手的坐标系描述、运动指令、速度设置等。
步骤三:实际操控在完成理论学习后,学生需要进行实际操控,以进一步掌握机械手的操作和编程方法。
可以为学生准备一台圆柱坐标式机械手,并给予相应的操作说明。
学生可以按照指定的任务要求,通过编程控制机械手完成相应的动作。
在实际操控过程中,学生应注意机械手的安全操作规范,避免发生意外事故。
步骤四:调试和故障排除在机械手的实际操作中,常常会遇到一些问题,如动作不准确、速度异常等。
学生需要学会如何调试和排除这些问题。
可以给学生提供一些常见问题的案例,让他们进行分析和解决。
在解决问题的过程中,学生需要查阅资料、寻求帮助,并通过实践经验不断积累。
圆柱坐标式机械手
圆柱坐标式机械手是一种基于圆柱坐标系设计的机械手臂,常用于工业生产线
中进行物料搬运、组装等任务。
其设计基于数学中的圆柱坐标系,通过旋转、伸缩等运动实现对工件的精准定位和操作。
结构组成
圆柱坐标式机械手通常由底座、转台、臂架、活动臂、末端执行器等部分组成。
底座固定在地面上,转台可实现水平旋转,臂架通过联轴器与转台相连,活动臂则连接在臂架上,末端执行器负责抓取、放置工件。
工作原理
圆柱坐标式机械手通过控制各关节的运动,实现对工件在水平平面内的定位及
动作。
通过联动转台和臂架,机械手可以在圆柱坐标系内实现三个自由度的运动。
同时,活动臂末端的执行器可根据需要旋转、张合,完成对工件的精确处理。
应用领域
圆柱坐标式机械手适用于需要大范围工作空间及较高精度要求的场景,如汽车
装配线、电子产品制造等。
因其结构简单、操作方便,广泛应用于自动化生产线中,提高了生产效率及产品质量。
发展趋势
随着工业自动化程度的不断提高,圆柱坐标式机械手在工业生产中的应用前景
广阔。
未来,随着技术的不断创新和升级,圆柱坐标式机械手将在精度、速度、功能等方面有所突破,更好地满足各行业的生产需求。
圆柱坐标式机械手的出现,为工业生产带来了更便捷、高效的解决方案,促进
了工业自动化技术的发展。
其优势在于灵活性强、操作简便、可靠性高,将在未来的工业生产中发挥越来越重要的作用。
圆柱坐标型机械手结构简图1. 引言圆柱坐标型机械手是一种常见的工业自动化设备,广泛应用于物流、生产制造、装配线等领域。
它具有灵活性高、准确度高、操作稳定等优点,适用于完成各种复杂任务。
在本文中,将介绍圆柱坐标型机械手的结构简图及其组成部分。
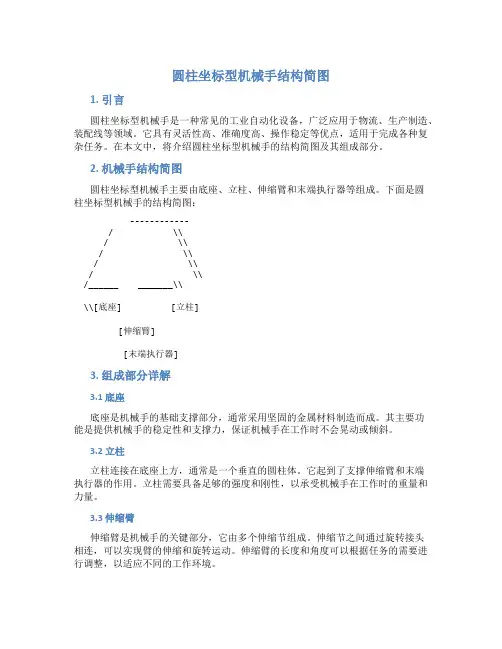
2. 机械手结构简图圆柱坐标型机械手主要由底座、立柱、伸缩臂和末端执行器等组成。
下面是圆柱坐标型机械手的结构简图:------------/ \\/ \\/ \\/ \\/ \\/______ _______\\\\[底座] [立柱][伸缩臂][末端执行器]3. 组成部分详解3.1 底座底座是机械手的基础支撑部分,通常采用坚固的金属材料制造而成。
其主要功能是提供机械手的稳定性和支撑力,保证机械手在工作时不会晃动或倾斜。
3.2 立柱立柱连接在底座上方,通常是一个垂直的圆柱体。
它起到了支撑伸缩臂和末端执行器的作用。
立柱需要具备足够的强度和刚性,以承受机械手在工作时的重量和力量。
3.3 伸缩臂伸缩臂是机械手的关键部分,它由多个伸缩节组成。
伸缩节之间通过旋转接头相连,可以实现臂的伸缩和旋转运动。
伸缩臂的长度和角度可以根据任务的需要进行调整,以适应不同的工作环境。
3.4 末端执行器末端执行器是机械手的“手”,用于抓取、移动和操作目标物体。
它通常通过夹爪、吸盘等装置来完成各种任务。
末端执行器的设计和功能根据实际应用需求而定,可以根据需要更换不同的末端执行器。
4. 工作原理圆柱坐标型机械手通过底座和立柱提供稳定的支撑,伸缩臂通过旋转接头和伸缩节实现伸缩和旋转运动。
末端执行器通过连接在伸缩臂的末端,完成目标物体的抓取、移动和操作。
机械手的运动通常由控制系统控制,例如使用编程控制或传感器反馈控制。
控制系统接收外部指令或感知外部环境,通过控制机械手的伸缩臂和末端执行器的运动,实现完成各种任务的目的。
5. 结论圆柱坐标型机械手是一种常见的工业自动化设备,由底座、立柱、伸缩臂和末端执行器等组成。
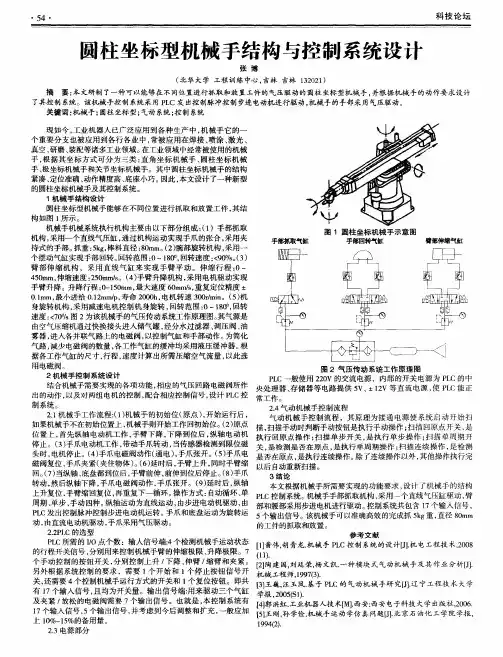
圆柱坐标式机械手设计概述圆柱坐标式机械手是一种广泛应用于工业生产线的机械设备,它可以在三维空间内进行各种运动控制,并完成各种任务,如搬运、装卸、加工等。
本文将对圆柱坐标式机械手的设计概述进行分析和讨论。
一、圆柱坐标系介绍圆柱坐标系是一种三维空间坐标系,其重要特点是使用极坐标系描述位置,即使用径向位置、角度和高度三个坐标描述三维空间内的任意一点。
在工业生产过程中,往往需要机械手能够在三维空间内进行移动、夹取等操作,因此圆柱坐标系的运动学性能就显得尤为重要。
二、圆柱坐标式机械手的结构设计圆柱坐标式机械手一般由底座、支臂、旋转关节、手臂、手腕和末端执行器等部分组成。
其中,底座是支架的基础结构,在整个机械手的运动过程中起到了稳定支撑的作用;支臂是机械手上升了一定高度后的支撑结构,通过旋转关节的转动实现机械手的转动操作;手臂是机械手的伸缩结构,它与旋转关节之间通过伸缩体连接,可以实现手臂的伸缩操作;手腕是机械手的转动结构,可以使整个手臂和末端执行器以各种不同的角度进行转动;末端执行器是机械手的活动手指,可以进行抓取、松开、旋转等操作。
三、圆柱坐标式机械手的动力学设计圆柱坐标式机械手在运动控制中需要考虑其负载能力和加速度等因素,这就需要进行动力学设计和分析。
主要考虑的参数包括机械手的载重能力、速度限制、加速度、惯性、运动惯量等。
这些参数的合理设定才能保证机械手在使用过程中的安全性和稳定性,从而达到高效地完成工作的目标。
四、圆柱坐标式机械手的控制系统设计圆柱坐标式机械手的控制系统设计包括硬件和软件两个方面。
硬件部分主要包括电机、传感器、执行器等元器件,这些元器件需要在系统之间进行良好的连接和配合,以实现机械手的各项运动和动作。
软件部分主要包括核心的程序控制器、编程、监控和数据处理等方面的设计,是整个控制系统的核心和基础,决定了机械手的操作精度和稳定性。
五、圆柱坐标式机械手的应用领域圆柱坐标式机械手的应用范围非常广泛,它可以应用于制造业、物流、医疗、农业等领域。
圆柱坐标机械手结构设计圆柱坐标机械手是一种常见的机器人结构,其可灵活地工作于三维空间内,并可实现各种各样的操作任务。
设计一台圆柱坐标机械手需要考虑多个方面,如机械结构的安全性能、控制系统的精度和可靠性等等。
在本文中,我们将对圆柱坐标机械手结构设计进行详细讨论,并介绍其在不同领域的应用。
1.结构设计圆柱坐标机械手结构设计需要考虑其空间可达性、负载能力、动力学性能、稳定性等因素。
其中空间可达性是一个重要的指标,它决定了机械手能够工作的范围和精度。
一般来说,机械手的可达范围应该涵盖整个工作空间,且在整个范围内的精度应该足够高。
在设计机械手结构时,我们可以采用链式结构或者纵向结构。
链式结构包括末端链式机械手和中心链式机械手,其构造简单、操作灵活,但其负载能力和精度较低。
纵向结构包括柱形机械手和底座机械手,其结构稳定、负载能力高,适用于重载和高精度的操作。
2.控制系统圆柱坐标机械手的控制系统包括机械运动控制和机器视觉控制。
机械运动控制采用轴控制和运动控制器实现机械手在三维空间内的操作。
在轴控制中,机械手的每个关节都由一个电机控制,通过给电机施加不同大小的电流来控制关节的运动。
运动控制器负责管理机械手的所有电机,并根据运动的需求控制各个关节以实现所需运动。
机器视觉控制也是圆柱坐标机械手中不可缺少的一部分。
机器视觉控制可以通过摄像机来实现对机械手末端的精确控制,从而确保其在执行任务时的精确性和准确性。
此外,还可以利用机器学习技术来对机械手运动进行优化和改进,从而提高机械手的智能化水平。
3.应用领域圆柱坐标机械手在工业、医疗、科研等领域都有广泛的应用。
在工业领域,机械手可以承担自动化生产线上的装配和加工任务,提高生产效率和降低劳动成本;在医疗领域,机械手可以用于手术等高精度操作,避免对患者的人为破坏;在科研领域,机械手可以用于承担各种测量和实验任务,对工程技术的发展做出贡献。
综上所述,圆柱坐标机械手是一种重要的机器人结构,其结构设计、控制系统和应用领域都有着广泛的应用前景。
圆柱坐标式机械手结构设计引言圆柱坐标式机械手广泛应用于工业自动化领域,具有较高的灵活性和精度。
本文将对圆柱坐标式机械手的结构设计进行详细分析与探讨。
结构设计方案圆柱坐标式机械手的结构设计包括机械结构和控制系统两个方面。
机械结构设计1. 基座:机械手的基座是安装机械手关节的支撑结构,通常采用坚固的钢板焊接而成,以确保机械手在工作中的稳定性和刚性。
2. 旋转关节:旋转关节是机械手的第一关节,它负责控制机械手在水平面内的旋转运动。
通常采用电机驱动的齿轮传动机构实现旋转运动,并通过编码器测量旋转角度,以提供反馈控制。
3. 升降臂:升降臂是机械手的第二关节,它负责控制机械手的垂直运动。
升降臂通常由伸缩式气缸或电动升降装置实现,通过伸缩运动来控制机械手的升降。
4. 伸缩臂:伸缩臂是机械手的第三关节,它负责控制机械手在水平方向的伸缩运动。
伸缩臂通常采用液压缸或气缸驱动,通过伸缩运动来控制机械手的伸缩距离。
5. 夹爪:夹爪是机械手的末端执行器,用于抓取和放置工件。
夹爪通常采用气动或电动夹持机构,以实现对工件的抓取和释放操作。
控制系统设计1. 运动控制:机械手的运动控制系统通常由计算机或嵌入式控制器控制。
控制系统接收传感器反馈的位置信息和运动目标,通过控制算法计算出适当的控制信号,并驱动相应的执行机构,实现机械手的运动控制。
2. 位置检测:位置检测是机械手控制系统的关键环节,通过编码器、光电开关或激光测距传感器等设备,实时检测机械手各关节的位置,并将位置信息反馈给控制系统,以实现精确的位置控制。
3. 安全保护:机械手在工作中需要与人类共同操作,在设计控制系统时需要考虑安全保护措施。
例如,设置急停开关、防止碰撞传感器和安全光栅等设备,以确保机械手在意外情况下能够停止运动并保护操作人员的安全。
结论圆柱坐标式机械手的结构设计是实现其高精度、高效率工作的基础。
合理的机械结构和控制系统设计可以提高机械手的运动灵活性和精度,从而满足各种工业生产需求。
圆柱坐标机械手结构设计概述随着工业自动化技术的不断发展,机器人应用的范围越来越广泛。
其中,机器人的结构设计是机器人性能的重要保障。
圆柱坐标机械手是一种常见的机器人结构,其结构特点是工作空间呈现为一个圆柱体,机器人工作的方向沿z轴方向。
在本文中,我们将对圆柱坐标机械手的结构设计进行概述。
一、机械手的基本结构圆柱坐标机械手主要由机械结构、执行机构、传感器等几部分组成。
其中,机械结构包含底座、竖杆、横臂、前倾臂、手腕等几部分。
整个机械臂的结构呈现为一条圆柱体,机械手的工作方向沿z轴方向。
执行机构包括电机、减速器、传动系统等部分。
传感器主要用于监测机器人的位置和运动状态。
二、机械手的结构设计1、底座设计底座是机械手的支撑结构,需要具有足够的稳定性和承载能力。
在圆柱坐标机械手中,底座为圆形或者方形,对底座的设计需要考虑到整个机械臂的重心和稳定性。
2、竖杆设计竖杆支撑着整个机械臂的横向移动,需要具有足够的强度和刚度。
在竖杆的设计中需要考虑到挠度和加工精度,并确保竖杆能够承受机械手在工作时的负载和震动。
3、横臂设计横臂是圆柱坐标机械手的重要组成部分,需要具有足够的强度和刚度。
在横臂的设计中需要考虑到挠度和加工精度,并确保横臂能够承受机械手在工作时的负载和震动。
4、前倾臂设计前倾臂能够在xz平面内移动,其结构需要具有足够的强度和刚度。
在前倾臂的设计中需要考虑到挠度和加工精度,并确保前倾臂能够承受机械手在工作时的负载和震动。
5、手腕设计手腕是机械手的末端执行机构,需要具有很高的精度和稳定性。
在手腕的设计中需要考虑到机械手的负载和精度要求,并采用适当的传动系统和控制算法来保证机械手的运动精度。
三、结论圆柱坐标机械手是一种常见的机器人结构,其结构特点是工作空间呈现为一个圆柱体,机器人工作的方向沿z轴方向。
机械手的结构设计对机器人性能具有非常重要的影响,需要考虑到机械臂的稳定性、强度、刚度和精度等因素。
因此,在机械手的设计中需要采用适当的设计方法和工艺流程,以确保机械手的质量和性能。
圆柱坐标式五自由度机械手引言机器人技术在现代工业中起着至关重要的作用,机械手是机器人中的一种重要设备。
圆柱坐标式五自由度机械手是一种常见的机械手,具有广泛的应用场景。
本文将介绍圆柱坐标式五自由度机械手的基本原理、结构和应用。
基本原理圆柱坐标式五自由度机械手由机座、大臂、小臂、手腕和末端执行器组成。
它的运动原理基于圆柱坐标系,通过控制各个关节的角度来实现机械手在三维空间中的运动。
圆柱坐标式五自由度机械手的自由度主要包括转动自由度和平移自由度。
其中,转动自由度是指机械手各个关节绕自身轴线的旋转,而平移自由度是指机械手在空间中沿某一方向的平移。
结构设计圆柱坐标式五自由度机械手的结构设计需要考虑机械手的稳定性、刚性和灵活性。
通常采用铝合金材料制作机械手的关节和支撑部件,以提高机械手的刚性和稳定性。
机座是机械手的基座,用于固定机械手的各个关节和支撑结构。
大臂和小臂是机械手中两个主要的部件,通过转动关节和平移关节连接在一起。
手腕是机械手的关键部件,它通过转动关节和滑动关节实现机械手的姿态调整。
最后,末端执行器是机械手的工作部件,可以根据具体需求设计为夹持器、吸盘或其他形式。
应用领域圆柱坐标式五自由度机械手具有广泛的应用领域。
其中,最常见的应用是在工业生产线上进行装配、搬运和焊接等工作。
机械手能够高效、准确地完成重复性工作,提高生产线的效率和质量。
此外,圆柱坐标式五自由度机械手还可以应用于医疗领域,例如用于手术辅助、药品分装和病人护理等。
机械手可以实现精确的操作,并减少医护人员的劳动强度。
另外,圆柱坐标式五自由度机械手还可以应用于科学研究领域。
例如,在物理学中,机械手可以用于进行实验样品的处理和测量。
在天文学中,机械手可以用于望远镜的定位和操作。
总结圆柱坐标式五自由度机械手是一种常见的机械手,通过控制各个关节的角度和平移来实现在三维空间中的运动。
它具有稳定性、刚性和灵活性,并在工业生产、医疗护理和科学研究等领域有着广泛的应用。
圆柱坐标型机械手一、简介圆柱坐标型机械手是一种常见的工业机械装置,它由底座、臂杆、关节和末端执行器等部件组成。
这种类型的机械手的运动方式类似于圆柱坐标系,可以在水平方向和垂直方向上移动,同时还可以进行旋转运动。
圆柱坐标型机械手广泛应用于自动化生产线和工业领域中。
二、结构和工作原理圆柱坐标型机械手通常由以下部件构成:1.底座:机械手的底部固定部分,用于提供稳定的支撑。
2.臂杆:连接底座和关节的长杆状部件,用于支撑机械手的运动。
3.关节:连接臂杆和末端执行器的关节部件,用于实现机械手的旋转运动。
4.末端执行器:机械手的末端工具,可根据需求进行更换,用于完成不同的工作任务。
圆柱坐标型机械手的工作原理如下:1.运动控制:机械手的运动通常由电机和控制系统驱动。
控制系统接收指令,通过控制电机的运行来实现机械手的移动和旋转。
2.坐标定位:机械手可以通过编码器或传感器来确定自身在空间中的位置。
控制系统根据坐标信息对机械手进行准确的定位和控制。
3.动作执行:机械手通过关节的运动来实现末端执行器的动作。
关节控制旋转角度,使机械手能够在水平和垂直方向上进行精确移动。
4.末端效应:末端执行器可以是夹具、吸盘、焊枪等工具,用于完成不同的工作任务。
机械手通过控制末端执行器的动作来完成各种操作,如抓取、装配、焊接等。
三、应用领域圆柱坐标型机械手在各个领域中都有广泛应用,特别是在自动化生产线上。
以下是一些常见的应用领域:1.组装线:在汽车制造、电子设备组装等行业中,机械手可以完成零件的拾取和组装操作,提高生产效率和质量。
2.包装和搬运:机械手可以在物流和仓储领域中进行物品的包装和搬运,减少人工劳动力,加快操作速度。
3.操作和检测:机械手可以在危险环境中执行操作和检测任务,如核电站维护、化工品处理等。
4.焊接和切割:机械手可以完成金属焊接和切割工作,提高生产效率和安全性。
5.医疗领域:机械手可以在手术室中进行精确操作,减少手术风险,提高手术质量。
圆柱坐标式机械手设计引言机械手是一种能够模仿和执行人工手动动作的自动化设备。
它由几个关节和执行器组成,可以完成需要复杂而精确的任务。
在工业生产中,机械手已经广泛应用于各种装配、搬运和加工等工作,大大提高了生产效率和质量。
本文将介绍圆柱坐标式机械手的设计原理和工作原理,并讨论其在工业领域的应用。
圆柱坐标系的定义圆柱坐标系是一种空间坐标系,其中位置由径向距离、方位角和高度组成。
在圆柱坐标系中,位置信息以极坐标形式表示,而不是直角坐标系中的笛卡尔坐标。
圆柱坐标系常用于描述圆柱形物体或球坐标系的数学问题。
在机械手设计中,圆柱坐标系被广泛应用于需要在空间中移动的任务。
圆柱坐标式机械手的设计原理圆柱坐标式机械手是一种基于圆柱坐标系的机械手设计。
它使用三个关节来实现机械手的运动,并通过控制关节的运动,实现机械手的位置和姿态调整。
机械手的位置信息由三个坐标表示:径向距离(R)、方位角(θ)和高度(Z)。
径向距离表示手的延伸程度,方位角表示手的旋转角度,而高度表示手的升降运动。
机械手的关节由电机和传动装置组成,通过控制电机的转动,传动装置将关节带动,实现机械手的运动。
在实际设计过程中,需要考虑关节的承载能力、速度和精度等因素。
圆柱坐标式机械手的工作原理圆柱坐标式机械手的工作原理可以分为以下几个步骤:1.传感器获取目标位置的圆柱坐标信息:首先,机械手需要通过传感器获取目标位置的圆柱坐标信息,包括径向距离、方位角和高度。
2.根据目标位置计算关节角度:通过逆运动学计算,根据目标位置的圆柱坐标信息,计算机械手各关节的角度。
3.控制关节运动:根据计算得到的关节角度,控制电机带动传动装置,使机械手达到目标位置。
4.完成任务:一旦机械手到达目标位置,它可以执行需要的任务,例如搬运物体或进行装配操作。
圆柱坐标式机械手的应用圆柱坐标式机械手具有广泛的应用领域,特别适用于需要在空间中移动的任务。
以下是一些常见的应用领域:1.组装线:圆柱坐标式机械手可以用于工业生产中的组装线,完成产品的装配操作。
摘要本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术的特点。
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
设计了机械手的手臂结构。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,大大提高了绘图效率和图纸质量,画出了机械手的装配图图。
关键词:工业机器人机械手电动电动式关节型机器人机械手AbstractAt first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development briefly. What’s more, the paper accounts for the background and the primary mission of the topic.The paper introduces the function, composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator,The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.The paper designs the structure of the arm. The paper institutes two control schemes of according to the work flow of the manipulator. The paper draws out the work time sequence chart and the trapezium chart.KEY WORDS: Industrial robot robot electricelectric-type joints robot manipulator目录第一章绪论 (5)1.1 绪言 (5)1.2 课题工作要求 (7)1.3 课题基本参数的确定 (8)第二章结构的设计 (10)2.1 手部的机构 (10)2.1.1 手指的形状和分类 (11)2.1.2 设计时考虑的几个问题 (11)2.1.3 手部夹紧的设计 (12)2.2 手腕结构设计 (13)2.2.1 手腕的自由度 (13)2.2.2 手腕的驱动力矩的计算 (13)2.3 手臂伸缩,升降的尺寸设计与校核 (18)2.3.1 手臂伸缩的尺寸设计与校核 (18)2.3.2手臂升降的尺寸设计与校核 (19)第三章控制系统设计 (22)总结 (43)致谢 (44)结参考文献 (45)第1章绪论1.1绪言到目前为止,世界各国对“机器人机械手”还没有做出统一的明确定义。
圆柱坐标式机械臂结构设计方案介绍机械臂是一种用于完成特定任务的机械装置,其结构设计对机械臂的运动范围、精度和可靠性等起着重要作用。
圆柱坐标式机械臂是一种常见的机械臂结构,其通过旋转基座、上下提升臂和手臂伸缩等方式实现多级运动。
本文将设计一个圆柱坐标式机械臂的结构方案,旨在提高机械臂的运动灵活性和精度。
结构设计基座基座是机械臂的支撑结构,承载着整个机械臂的重量,并提供稳定的基准平面。
基座采用具有较高强度和刚度的铝合金材料制作,以确保机械臂在运动过程中的稳定性。
基座的下方安装有多个可调节的螺丝支撑脚,以便在不平整的地面上进行微调。
第一级关节第一级关节是机械臂的旋转关节,它使整个机械臂能够绕垂直于基座的轴旋转,从而实现大范围内的平面运动。
第一级关节由电动驱动器和减速装置组成,采用高精度的行星减速器以提供稳定的旋转动力,并降低驱动器的负载和能耗。
第二级关节第二级关节是机械臂的上下提升关节,它使机械臂能够在垂直方向上进行平稳的升降运动。
第二级关节采用液压缸作为动力源,通过液压泵提供高压油液,驱动液压缸实现机械臂的上下运动。
第三级关节第三级关节是机械臂的伸缩关节,它使机械臂能够在水平方向上进行伸缩运动。
第三级关节采用电动驱动器和丝杆传动机构,通过变速传动机构将电机旋转转换为线性运动,从而实现机械臂的伸缩。
末端执行器末端执行器是机械臂的最末端部分,用于实际完成特定任务。
根据不同的应用需求,末端执行器可以是夹具、吸盘、喷枪等。
末端执行器通过与机械臂的最后一个关节连接,实现机械臂的各种操作。
优点和应用圆柱坐标式机械臂结构设计方案具有以下优点:•运动灵活:机械臂具有多级运动自由度,可以在多个方向上进行运动和操作。
•精度高:采用高精度的驱动器、传动机构和减速装置,能够提供高精度的运动和定位。
•载荷能力强:机械臂的结构设计合理,能够承载较大的负载,并保持稳定性和精度。
圆柱坐标式机械臂结构适用于以下应用领域:•工业生产线:可用于自动化装配、焊接、喷涂、搬运等工业生产过程。
圆柱坐标式机械手设计概述圆柱坐标式机械手,又称作柱三维式机械手,是一种基于圆柱坐标系的机械手。
它由一个固定底座、一个竖直的旋转臂和一个水平的移动臂构成,能够在三维空间内进行精准的定位、旋转和抓取操作。
本文将从机械手设计的角度,分析圆柱坐标式机械手的特点和设计的方法。
设计目标在设计圆柱坐标式机械手之前,需要先确定设计目标。
一般来说,设计目标有以下几个方面:1. 功能要求:机械手应该能够完成的工作,如抓取物品、放置物品、旋转物品等等。
2. 作业范围:机械手的有效作业范围与自由度密切相关。
在设计机械手时需要考虑到最大活动范围和最大负载。
3. 精度要求:机械手精度可以根据其应用领域不同而有很大的变化,需要根据实际情况进行调整。
4. 控制要求:机械手控制系统通常有手动控制和自动控制两种形式,需要根据实际情况选择。
机械手的设计要素1. 机械手骨架设计:机械手骨架设计是机械手设计的基础,其主要依据工作负载的大小、工作空间的形状、机械手的自由度和机械手操作起来的方便程度,以及机械手配套的附件和控制系统等因素。
2. 机械手臂设计:机械手臂设计应该考虑到负载、移动角度、距离和速度。
加入传感器可以提高机械手的精度和控制性。
3. 夹爪设计:夹爪是机械手重要组成部分,需要考虑到夹爪大小、形状、动力、重量和惯性等因素。
夹爪设计的好坏会对机械手抓取操作的效率和准确性起着非常重要的影响。
4. 控制系统设计:机械手的控制系统通常有手动和自动控制两种形式,自动化控制是最主要的控制方式。
控制系统需要可以控制机械手的移动、旋转、抓取和松开等工作。
设计注意事项1. 功能要求应该以机械手的实际需求为出发点,而不是为了增加复杂性而增加功能。
2. 机械手骨架的设计应该有利于附件和控制系统的调整和安装。
3. 夹爪设计应该适合机械手操作的速度和负载,需要注意反应速度和夹持力度的平衡。
4. 机械手的材料选择应能保证其强度和刚性等性能,而注意重量的控制。
圆柱坐标式三自由度机械手
摘要
机器人不仅是一种自动化的机器。
机器人是一种可重新编程的、多功能的、机械手,为实现各种任务设计成通过可改变的程序动作来移动材料、零部件、工具或是其他专用装置。
本设计设计的是一种圆柱坐标式机械手,该装置具有三个独立运动(两个直线运动、一个旋转运动),也确实是所讲的三个自由度。
该机构中立柱可相关于机座旋转180度,回转速度15r/min,可水平伸缩距离400mm,移动速度约0.2m/s,机械手可上下垂直运动,其垂直升降量1000mm,移动速度约0.15m/s,机械手最大夹持重量10kg,所夹持工件为圆柱形,直径范围:
Ф30mm—Ф120mm。
本设计的旋转运动采纳摆动液压马达(旋转液压缸)驱动,水平伸缩运动采纳液压缸驱动,垂直升降运动仍采纳液压缸驱动。
关键词:三自由度,圆柱坐标式,工业机器人,机械手
CYLINDRICAL COORDINATE ROBOT OF
THREE DEGREES OF FREEDOM
ABSTRACT
A robot is not simply another automated machine. A robot is a reprogrammable multifunctional manipulator designed to
move material, parts, tool, or specialized devices through variable programmed motions for the performance of a variety of task.
This design is a cylindrical coordinate manipulator, the device has three separate campaigns (two straight-line movement, a rotating Movement), that is to say that the device has three degrees of freedom. The bodies of the column can be compared to frame 180-degree rotation, with the rotation speed 15 r / min. The manipulator may be stretching from the level of 400mm, with the moving speed about 0.2 m/ s. From the top to the bottom, the manipulator can do vertical movement and its vertical take-off and landing is 1000mm, with the moving speed about 0.15 m/ s. The largest weight
that the device grip can lead to 10kg.The workpiece with the diameter from 30mm to 120mm that the device can grip is cylindrical.
According to the issue demands ,besides, careful thinking and ask the teacher, the rotating movements of the design opts rotating hydraulic motor (rotating cylinder) , the level of stretching movements are driven by hydraulic cylinders, vertical take-off and landing movements are still driven by hydraulic cylinders.
KEY WORDS:Three degrees of freedom, Cylindrical,Industrial robot, Manipulator
目录
前言 (1)
第1章概述 (2)
1.1 工业机械手的概述 (2)
1.1.1 机械手的组成 (2)
1.1.2 机械手的运动与分类 (3)
1.1.3 机械手的要紧参数 (4)
1.1.4 机械手的结构 (5)
1.2 工业机械手的进展 (5)
1.3 工业机械手在我国的进展与应用 (6)
第2章总体设计方案 (8)
2.1 总体设计的思路 (8)
2.1.1 思路 (8)
2.2 总体方案的确定 (8)
2.2.1 方案 (8)
第3章机械手相关的设计与计算 (9)
3.1 手指的相关设计与计算 (9)
3.1.1 手指夹紧力的计算 (9)
3.1.2 手部液压缸的选取 (11)
3.1.3 水平伸缩缸尺寸计算 (13)
3.1.4 垂直升降液压缸要紧参数的确定 (14)
3.2 升降手臂的设计 (16)
3.3 立柱与托盘的设计 (17)
3.4 液压马达的设计与计算 (19)
3.5 液压泵、电机的选择 (21)
3.6 机械手的操纵 (22)
第4章相关的校核 (23)
4.1 手爪扇形齿轮与齿条强度校核 (23)
结论 (24)
谢辞 (25)
参考文献 (26)
前言
机器人技术的进展,能够讲是科学技术进展共同的一个综合性的结果,同时,也是为社会经济进展产生了重大阻碍的一门科学技术,它的进展归功于在第二次世界大战中各国加强了经济的投入,就加强了本国的经济的进展。
另一方面它也是生产力进展的需求的必定结果,也是人类自身进展的必定结果,人类的进展随着人们逐渐的这种社会进展的情况,人们越来越不断探讨自然过程中,在改造自然过程中,认识自然过程中,需求能够解放人的一种工具。
那么这种工具确实是代替人们去能够从事复杂和繁重的体力劳动,实现人们对不可达世界的认识和改造,这也是人们在科技进展过程中的
一个客观需要。
另一方面,人们有各种各样的好的方法,它也归功于电子技术,计算机技术以及制造技术等相关技术的进展而产生了提供了强大的技术保证。
毕业设计是对大学所学的知识的总结和运用。
它是基础知识和专业知识的统一,是理论和实践相结合,这加深了我们对所学知识的理解和灵活运用。
通过查阅大量的资料,学到了专门多在课堂上学不到的知识和掌握了一部分新的理念,为我们走向工作岗位奠定了一定的知识基础。
同时,也是检验我们掌握所学知识的深度和力度
第1章概述
1.1 工业机械手的概述
工业机器手的用途十分广泛,它关于实现生产过程的自动化,提高劳动效率,减轻工人的劳动强度,保证工人的安全都具有重要的意义,尤其关于那些有毒、高危、多粉尘、油漆、深水作业的工作环境和有放射等恶劣环境条件下的作业,使用工业机械手和机器人更具有显著的优越性,在FMS 中要实现物流系统的正常运用,以实现坯料进入车间到加工成成品零件的全过程,使各个环节都能进行自动连接,以及机床刀具的自动调换,机械手都将起的重要的作用。
随着机。