自动控制原理公式
- 格式:docx
- 大小:37.02 KB
- 文档页数:2
自动控制原理公式下面是一些重要的自动控制原理公式:1.连续时间系统的传递函数:传递函数是描述系统输入和输出之间关系的函数。
对于连续时间系统,传递函数表示为s的函数:G(s)=Y(s)/U(s)其中,G(s)是系统的传递函数,Y(s)是系统的输出,U(s)是系统的输入,s是复变量。
2.离散时间系统的传递函数:对于离散时间系统,传递函数表示为z的函数:G(z)=Y(z)/U(z)其中,G(z)是系统的传递函数,Y(z)是系统的输出,U(z)是系统的输入,z是复变量。
3.闭环传递函数:闭环传递函数描述了闭环控制系统的输入和输出之间的关系。
对于连续时间系统,闭环传递函数表示为s的函数:T(s)=Y(s)/R(s)其中,T(s)是闭环传递函数,Y(s)是系统的输出,R(s)是参考输入。
4.控制系统的传递函数表达式:控制系统的传递函数可以表示为系统组成部分的传递函数之间的乘积或相加。
例如,对于一个系统,其传递函数可以表示为:G(s)=G1(s)*G2(s)/(1+G1(s)*G2(s)*H(s))其中,G1(s)和G2(s)是系统的组成部分的传递函数,H(s)是反馈路径的传递函数。
5.极点和零点:极点是系统传递函数的根,决定了系统的稳定性和动态响应。
零点是传递函数等于零的点,对系统的频率响应和稳定性有影响。
6.PID控制器公式:PID控制器是一种常见的反馈控制器,它根据误差信号来调整系统输出。
PID控制器的输出由比例项、积分项和微分项组成,公式表示为:u(t) = Kp * e(t) + Ki * ∫ e(t)dt + Kd * de(t) / dt其中,u(t)是PID控制器的输出,Kp、Ki、Kd是控制器的参数,e(t)是当前时刻的误差信号,∫ e(t)dt和de(t) / dt分别是误差信号的积分和微分。
这些公式只是自动控制原理中的一小部分,涵盖了控制系统的建模和调节方法。
自动控制原理公式是自动控制工程师和研究人员分析和设计自动控制系统的重要工具。
自动控制原理超调量公式在自动控制系统中,超调量这个词听起来可能有点高深,但其实它跟我们的日常生活息息相关,简直就是控制系统中的“小调皮”。
别着急,我这就带你一起捋一捋这个概念,让你轻松搞懂它的来龙去脉。
1. 什么是超调量?1.1 定义首先,超调量就是指在系统响应过程中,输出值超出期望值的那部分。
想象一下,你等公交车,刚走到站台,公交车来了,你兴冲冲地挥手,结果一不小心,超出了站台边缘,哎呀,差点摔个四脚朝天!这个“超出”的感觉,就是超调量。
1.2 举个例子再说个生活中的例子,你家里的空调是不是会在你设定温度时,先把温度降得比你想要的低一点,然后再慢慢调回去?这就是超调量的一个体现!空调觉得“哎呀,我得快点让你凉快”,于是就先使劲儿降温,然后再“慢慢来”。
这样一来,虽然你最终是凉快了,但那一瞬间的“冷”可真是让人受不了,感觉像是走进了冰箱。
2. 超调量的公式2.1 公式介绍说到公式,这里得提一下控制理论中的一个重要公式:超调量一般用百分比来表示,计算公式是:。
M_p = frac{y_{max y_{ss{y_{ss times 100% 。
这里的 ( y_{max ) 是系统输出的最大值,而 ( y_{ss ) 是稳态值。
简单来说,就是你最高点和最终目标之间的差距,再用这个差距除以目标值,乘以100就得到了超调量。
2.2 公式应用当你把这个公式运用到实际中去时,就像是给你的超调量穿上了一件“外套”,让它看起来更加高大上。
想象一下,假设你设定的温度是25度,但空调调到的最高温度是30度,那么你的超调量就是:。
M_p = frac{30 25{25 times 100% = 20% 。
哇,20%的超调量!这意味着空调在调整过程中,真是“火力全开”,给你来了个“冰火两重天”!3. 超调量的重要性3.1 控制系统的影响那么,超调量到底有什么重要性呢?首先,它影响着系统的稳定性和响应速度。
就像你在追求一份目标时,假如你总是走得太快,结果反而可能会摔倒,反而慢下来会更稳妥。
自动控制原理阻尼比计算公式在自动控制领域,阻尼比是一个非常重要的概念。
阻尼比是指系统的阻尼与临界阻尼的比值。
它是一个无量纲的参数,通常用ζ表示。
阻尼比的大小与系统的稳定性、响应速度、振幅大小等参数有着密切的关系。
因此,阻尼比的计算是自动控制中的一个重要问题。
在本文中,我们将介绍阻尼比的定义、计算公式及其应用。
首先,我们来看看阻尼比的定义。
阻尼比的定义阻尼比是指系统的阻尼与临界阻尼的比值。
临界阻尼是指系统在达到稳态时,振动的幅值最小的阻尼。
当阻尼比为1时,称为临界阻尼。
当阻尼比小于1时,称为欠阻尼;当阻尼比大于1时,称为过阻尼。
阻尼比的计算公式阻尼比的计算公式如下:ζ = c / c_c其中,ζ表示阻尼比,c表示系统的阻尼,c_c表示临界阻尼。
系统的阻尼可以通过测量系统的阻尼系数来得到。
阻尼系数是指系统在受到外力作用后,系统所受到的阻力与其速度之比。
阻尼系数可以通过实验测量来得到。
一般来说,阻尼系数与系统的阻尼成正比。
因此,我们可以通过测量系统的阻尼系数来得到系统的阻尼。
临界阻尼可以通过系统的固有频率来计算。
固有频率是指系统在无外力作用下,自由振动的频率。
当系统的阻尼等于临界阻尼时,系统的固有频率就等于系统的自然频率。
因此,我们可以通过测量系统的固有频率来计算系统的临界阻尼。
阻尼比的应用阻尼比是自动控制中的一个重要参数,它与系统的稳定性、响应速度、振幅大小等参数有着密切的关系。
在控制系统的设计中,我们需要根据实际情况来选择合适的阻尼比。
当阻尼比小于1时,系统处于欠阻尼状态。
在这种情况下,系统的振幅会不断增大,直到系统失稳。
因此,我们需要加大系统的阻尼,以提高系统的稳定性。
当阻尼比大于1时,系统处于过阻尼状态。
在这种情况下,系统的响应速度会变慢,因为阻尼会抑制系统的振荡。
因此,我们需要适当减小系统的阻尼,以提高系统的响应速度。
当阻尼比等于1时,系统处于临界阻尼状态。
在这种情况下,系统的响应速度和稳定性都达到了最优值。
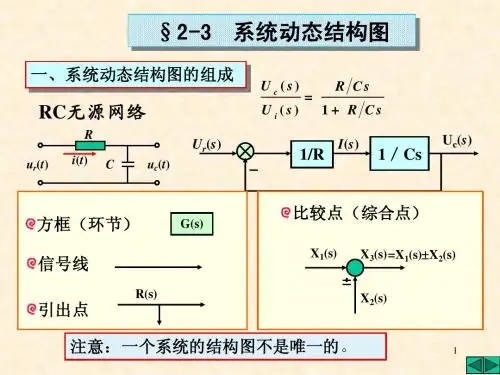
1.闭环控制系统的基本组成是什么?控制器、执行器、被控对象、反馈环节2.自动控制系统的分类是什么?开环控制、闭环控制、复合控制3.传递函数、系统动态结构图、信号流程图和脉冲响应函数;传递函数定义:在零初始条件下,线性定常系统输出量的拉普拉斯变换与系统输入量的拉普拉斯变换之比。
G(S)=C(S)/R(S)性质:(1)传递函数只适应于线性定常系统(2)传递函数只取决于系统的结构和参数,而与系统的输入、输出无关。
它表示系统的固有性质,是一种在复数域描述系统的数学模型(3)传递函数是在零初始条件下定义的,因而不能反映非零初始条件下系统的运动过程(4)传递函数是复变量S的有理分式,其分子分母的各项系数均为实数,传递函数分母中S的最高次n即为系统的阶次4.控制系统的时域分析法(一阶系统分析)5.控制系统的频率特性分析法(代数解析法和图形表示法)模电数电1.常用半导体器件及应用二极管:二极管又称晶体二极管,简称二极管(diode),另外,还有早期的真空电子二极管;它是一种具有单向传导电流的电子器件。
特性:单向导电性。
二极管的特性曲线与PN结一样,二极管具有单向导电性。
硅二极管典型伏安特性曲线(图)。
在二极管加有正向电压,当电压值较小时,电流极小;当电压超过0.6V时,电流开始按指数规律增大,通常称此为二极管的开启电压;当电压达到约0.7V时,二极管处于完全导通状态,通常称此电压为二极管的导通电压,用符号UD表示。
对于锗二极管,开启电压为0.2V,导通电压UD约为0.3V。
类型二极管种类有很多,按照所用的半导体材料,可分为锗二极管(Ge管)和硅二极管(Si管)。
根据其不同用途,可分为检波二极管、整流二极管、稳压二极管、开关二极管、隔离二极管、肖特基二极管、发光二极管、硅功率开关二极管、旋转二极管等。
晶闸管:晶闸管(Thyristor)是晶体闸流管的简称,又可称做可控硅整流器,以前被简称为可控硅;晶闸管是PNPN四层半导体结构,它有三个极:阳极,阴极和门极;晶闸管具有硅整流器件的特性,能在高电压、大电流条件下工作,且其工作过程可以控制、被广泛应用于可控整流、交流调压、无触点电子开关、逆变及变频等电子电路中。
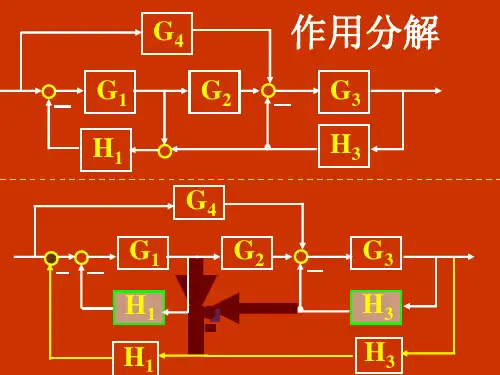
A.阶跃函数 斜坡函数 抛物线函数 脉冲函数 正弦函数B.典型环节的传递函数 比例环节 惯性环节(非周期环节) 积分环节微分环节 二阶振荡环节(二阶惯性环节) 延迟环节 C.环节间的连接串联并联反馈 开环传递函数=前向通道传递函数=负反馈闭环传递函数 正反馈闭环传递函数D.梅逊增益公式E.劳斯判据 劳斯表中第一列所有元素均大于零 s n a 0 a 2 a 4 a 6 …… s n-1a 1 a 3 a 5 a 7 ……s n-2 b 1 b 2 b 3 b 4 …… s n-3 c 1 c 2 c 3 c 4 …… … … …s 2 f 1 f 2s 1 g 1 s 0 h 1,,,,,,141713131512121311171603151402131201b b b a a c b b b a a c b b b a a c a a a a a b a a a a a b a a a a a b -=-=-=-=-=-=劳斯表中某一行的第一个元素为零而该行其它元素不为零,ε→0;劳斯表中某一行的元素全为零。
P(s)=2s 4+6s 2-8。
F.赫尔维茨判据 特征方程式的所有系数均大于零。
⎩⎨⎧≥<=000)(t A t t r ⎩⎨⎧≥<=000)(t At t t r ⎪⎩⎪⎨⎧≥<=02100)(2t At t t r ⎪⎩⎪⎨⎧>≤≤<=εεt t z At t r 0000)(⎩⎨⎧≥<=0sin 00)(t t A t t r ωKs R s C s G ==)()()(1)()()(+==Ts K s R s C s G sT s R s C s G i 1)()()(==sT s R s C s G d ==)()()(2222)(n n n s s K s G ωζωω++=se s R s C s G τ-==)()()()()()( )()()()()()()()()(211121s G s G s G s X s C s X s X s R s X s R s C s G n n =⋅==-)()()( )()()()()()()(2121s G s G s G s R s C s C s C s R s C s G n n +++=+++== )()()()(s H s G s E s B =)()()(s G s E s C =)()(1)()()()(s H s G s G s R s C s +==Φ)()(1)()()()(s H s G s G s R s C s -==Φ∆∆=∑kk P TG.误差传递函数扰动信号的误差传递函数单位 输入形式 稳态误差e ss 0型 Ⅱ型 Ⅲ型 阶跃1(t) 1/1+Kp 0 0 斜坡t ·1(t) ∞ 1/Kv 0 加速度0.5t 2·1﹙t ﹚∞ ∞ 1/Ka I.二阶系统的时域响应:其闭环传递函数为 或 系统的特征方程为2)(22=++=n n s s s D ωζω特征根为1,221`-±-=ζωζωn n s上升时间t r其中 峰值时间t p最大超调量M p调整时间t sa.误差带范围为 ±5%b.误差带范围为± 2%振荡次数NJ.频率特性:还可表示为:G (jω)=p (ω)+jθ(ω) 为G (jω)的实部,称为实频特性; θ(ω)——为G (jω)的虚部,称为虚频特性。
自动控制原理公式汇总松鼠学长自动控制原理涉及的公式有很多,以下列举一些常见的公式:1.控制器传递函数:H(s) = Kp + Ki/s + Kds其中,Kp为比例增益,Ki为积分增益,Kd为微分增益,s为Laplace变量。
2.开环传递函数:G(s) = H(s) * P(s)其中,G(s)为开环传递函数,P(s)为系统传递函数。
3.闭环传递函数:T(s) = G(s) / (1 + G(s) * H(s))其中,T(s)为闭环传递函数。
4.稳态误差公式:e_ss = 1 / (1 + G(0))其中,e_ss为稳态误差,G(0)为开环传递函数的静态增益。
5.频率响应公式:G(jω) = |G(jω)| * exp(jθ)其中,G(jω)为频率响应,|G(jω)|为增益,θ为相位。
此外,控制系统还有一些特殊情况下的公式,如1.一阶惯性环节的传递函数:P(s) = K / (Ts + 1)其中,K为增益,T为时间常数。
2.二阶惯性环节的传递函数:P(s) = K / (T^2s^2 + 2ζTs + 1)其中,K为增益,T为时间常数,ζ为阻尼比。
以上只是一些常见的公式,实际上,自动控制原理还涉及到了更多的公式和理论,如PID控制算法的具体公式等等。
在不同的控制问题和应用中,还会涉及到更多的特定公式。
补充拓展:自动控制原理还包括了许多其他重要的概念和原理,如采样定理、校正方法、反馈控制系统等。
此外,还有针对不同类型系统的特定控制方法,如模糊控制、自适应控制、最优控制等。
这些方法也涉及到特定的公式和算法。
总之,自动控制原理是一个复杂而庞大的学科,其公式和理论涉及到多个方面。
在应用中,需要根据具体的问题和系统来选择适当的公式和方法。
自动控制原理公式
自动控制系统最常用的数学描述是利用控制工程中的数学模型。
数学模型是通过分析和建立系统的动态行为方程、传输函数或状态空间方程来描述系统的数学形式。
以下是一些常用的控制原理公式:
1.闭环系统传递函数公式
闭环系统传递函数是表示控制器输出信号C(s)与参考输入信号R(s)之间的关系的函数。
通常表示为T(s)或G(s)。
2.开环传递函数公式
开环传递函数是表示控制器输出信号和系统输入信号之间的关系的函数。
通常表示为G(s)。
3.比例控制器公式
比例控制器是最简单的控制器之一,其输出信号与误差信号之间的关系为:C(t)=Kp*e(t),其中Kp为比例增益,e(t)为误差信号。
4.积分控制器公式
积分控制器输出信号与误差信号的时间积分之间的关系为:C(t) = Ki * ∫e(t)dt,其中Ki为积分增益。
5.微分控制器公式
微分控制器输出信号与误差信号的时间微分之间的关系为:C(t) = Kd * de(t)/dt,其中Kd为微分增益。
6.传递函数的极点和零点公式
传递函数的极点和零点是指传递函数的分母和分子中令传递函数等于
零的根。
传递函数的极点和零点对系统的稳定性、阻尼比、过渡特性等有
重要影响。
7.控制系统稳定性判据公式
控制系统稳定性判据是通过判断传递函数的极点位置来评估系统的稳
定性。
例如,对于一阶系统,系统稳定的条件是极点实部小于零;对于二
阶系统,系统稳定的条件是极点实部均小于零。
8.级联控制系统公式
级联控制系统是由两个或多个控制回路组成的系统。
级联控制系统的
传递函数可以通过将各个回路的传递函数相乘来获得。
9.PID控制器公式
PID控制器是包含了比例控制器、积分控制器和微分控制器的三个组
成部分的控制器。
PID控制器的输出信号与误差信号的线性组合关系为:
C(t) = Kp*e(t) + Ki∫e(t)dt + Kd *de(t)/dt。
以上是一些常见的自动控制原理公式,用于描述和分析控制系统的特
性和行为。
在实际应用中,根据具体系统和控制要求,还会有其他补偿器、滤波器等的公式和方法。
自动控制理论在工业、交通、航天等领域中得到
广泛应用,对提高系统性能和效率有着重要作用。