乐高机器人简单程序编写入门ppt课件
- 格式:ppt
- 大小:2.87 MB
- 文档页数:2
乐高简单程序编写入门乐高简单程序编写入门一、简介乐高是一款教育性玩具,它可以通过编程来实现各种不同的功能。
本文将介绍乐高的编程入门知识,帮助读者快速上手乐高的编程。
二、准备工作在开始编写乐高程序之前,需要先完成以下准备工作:1、在电脑上安装乐高编程软件。
2、配置乐高与电脑之间的连接,确保能够正常通信。
三、乐高编程软件介绍乐高编程软件是一款易于使用的图形化编程工具,适合初学者入门。
软件界面简单直观,并且提供了丰富的编程模块,方便用户进行程序的编写与编辑。
四、编程基础知识1、程序结构:了解乐高程序的基本结构,包括开始、执行、循环和结束等部分的组成。
2、传感器与执行器:学习如何使用乐高的传感器来获取环境信息,并通过执行器来控制的动作。
3、变量与逻辑运算:掌握如何使用变量来存储数据,并学会使用逻辑运算符来进行条件判断和控制流程。
4、循环与判断:学习如何使用循环语句和条件语句来控制程序的执行流程,实现不同的功能。
五、实例教程以下是几个实例教程,通过这些实例可以帮助读者更好地理解乐高的编程:1、程序1:简单的移动控制,通过编写程序让前进、后退、左转、右转等基本动作。
2、程序2:传感器控制,通过编写程序让根据传感器的信号进行相应的动作,如遇到障碍物时停下。
3、程序3:循线控制,通过编写程序让沿着黑线行走,同时可以根据传感器的反馈做出相应的调整。
六、注意事项在编写乐高程序时需要注意以下几点:1、遵守相关法律法规,不进行恶意攻击或非法操作。
2、在程序编写之前,将放置在平坦的地面上,确保安全。
3、在调试程序过程中,避免将放置在危险或易损坏的区域。
附件:本文档配有附件,包括乐高编程软件安装文件、示例程序和相关教程。
法律名词及注释:1、著作权:著作权是指对于创作出的文学、艺术和科学作品享有的权益。
在乐高编程中,编写的程序也会受到著作权的保护。
2、隐私权:隐私权是指个人对其个人生活、私人信息的保护权利。
在乐高编程中,需要尊重他人的隐私权,不侵犯他人的个人信息。
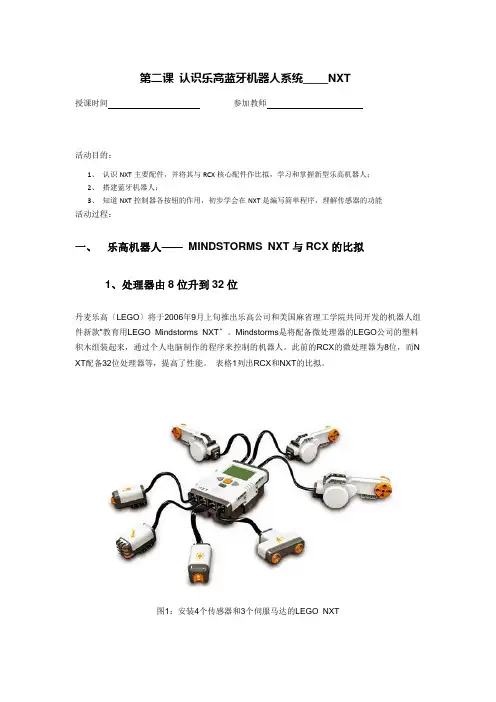
第二课认识乐高蓝牙机器人系统____NXT授课时间参加教师活动目的:1、认识NXT主要配件,并将其与RCX核心配件作比拟,学习和掌握新型乐高机器人;2、搭建蓝牙机器人;3、知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、乐高机器人——MINDSTORMS NXT与RCX的比拟1、处理器由8位升到32位丹麦乐高〔LEGO〕将于2006年9月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGO Mindstorms NXT〞。
Mindstorms是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8位,而N XT配备32位处理器等,提高了性能。
表格1列出RCX和NXT的比拟。
图1:安装4个传感器和3个伺服马达的LEGO NXT图4:LEGO NXT系统目前提供的4种传感器全家福5、改良了编程软件NXT程序用软件“R OBOLAB ver.2.9〞,跟ROBOLAB原来的版本一样,是基于NI LabVI EW开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近4 00个图标进行编程,这次减少为约40个,从而使得编程更为简单。
OS为“Windows2000〞以上和“Mac OS X〞。
图5:乐高网站给出的ROBOLAB 2.9的样图,跟以前版本相比,变化较大二、快速认识NXT1、按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、NXT显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“My Files我的文件〞、“Try me测试〞、“Settings设置〞、“Bluetooth蓝牙〞、“View查看〞、“NXT Progra m NXT程序〞。

第二课认识乐高蓝牙机器人系统____NXT授课时间参加教师活动目的:1、?认识NXT主要配件,并将其与RCX核心配件作比较,学习和掌握新型乐高机器人;2、?搭建蓝牙机器人;3、?知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、乐高机器人——MINDSTORMSNXT与RCX的比较1、处理器由8位升到32位丹麦乐高(LEGO)将于2006年9月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGOMi ndstormsNXT”。
Mindstorms是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8位,而NXT配备32位处理器等,提高了性能。
表格1列出RCX和NXT的比较。
图1:安装4个传感器和3个伺服马达的LEGONXT图4:LEGONXT系统目前提供的4种传感器全家福5、改进了编程软件NXT程序用软件“ROBOLAB,跟ROBOLAB原来的版本一样,是基于NILabVIEW开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近400个图标进行编程,这次减少为约40个,从而使得编程更为简单。
OS 为“Windows2000”以上和“MacOSX”。
图5:乐高网站给出的ROBOLAB2.9的样图,跟以前版本相比,变化较大二、?快速认识NXT1、?按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、?NXT显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“MyFiles我的文件”、“Tryme测试”、“Setti ngs设置”、“Bluetooth蓝牙”、“View查看”、“NXTProgramNXT程序”。
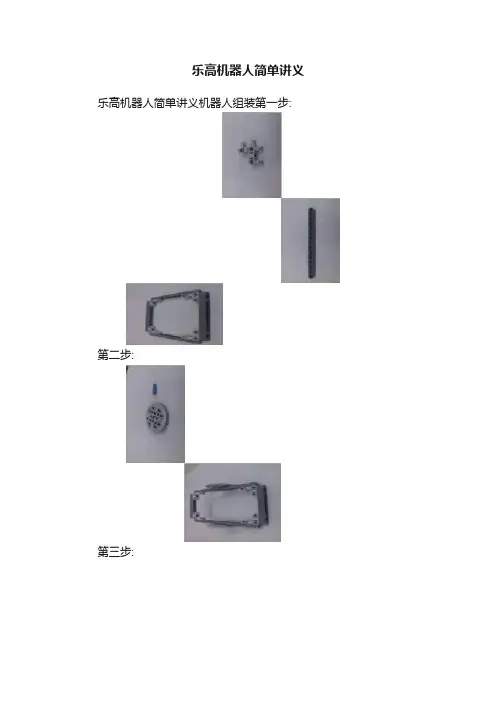
乐高机器人简单讲义乐高机器人简单讲义机器人组装第一步:第二步:第三步:乐高机器人简单讲义第四步:第五步:乐高机器人简单讲义第六步:第七步:乐高机器人简单讲义第九步:乐高机器人简单讲义第十步:乐高机器人简单讲义NXT控制器A B CNXT智能积木块有三个输出端口,分别为A、B、C,可以连接电机和灯泡。
NXT有四个输入端口1、2、3、4,连接不同的传感器,通过转换器可连接RCX系列传感器。
1 2 3 4软件面板:菜单栏工具栏程序名字2.编程区面板3.控制面板 1.模块面板基本面版完整面板自定义面板4.参数设置面板乐高机器人简单讲义常用面板介绍可以设置A、B、C三个输出端口连接方式,电机输出方向、能量级别和延续时间等。
通过程序下载声音文件到NXT,并保存在记录A、B、C三个端口输出动作、可以设置记录时间,然后通过“播放”功能,将刚才NXT“sound files”文件执行的动作复制出来。
中,可以选择软件自带的文件,也可以自可以显示图像和文本,我们可以通过将“数字转换为文本”功能,将电机和传感器的数据实时己来编写。
显示在NXT屏幕上。
有时间和传感器等待,包括触动传感器、声音传感器、光电传感器和超声波传感器等待。
分支条件有传感器和参数值判断,传感器包括“无限循环、时间循环、传感器循环、次数循环和逻辑判断循环”。
分支包括“触动、声音、光电等”,参数值分支包括“数字判断、逻辑判断和文本判断”。
完整面板介绍包含“常用面板”里所有的功能模块。
输出功能模块,包括单电机、灯泡、发送信息(通过蓝牙)、声音和NXT显示器输出模块。
可以设置NXT传感器,RCX传感器、计时器传感器、NXT按钮和接收信息。
包括“等待、循环、分支”结构功能模块和停止输出模块。
可以定义变量,能进行数据运算,包括加、减、乘、除、大小、范围和逻辑判断。
包括文本模块、数字转换文本模块、保持激活模块、文件存储模块、校准模块、重置电机模块。
乐高机器人简单讲义自定义面板:可以自己设计模块,根据需求可以设机成不同的图标,能进行个性化命名将一段程序模块化可以把任务分解成若干个小任务来单独完成,方便阅读。
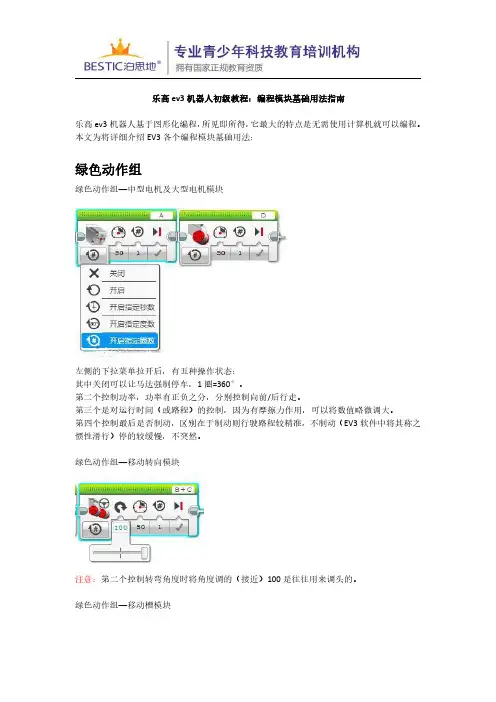
乐高ev3机器人初级教程:编程模块基础用法指南乐高ev3机器人基于图形化编程,所见即所得,它最大的特点是无需使用计算机就可以编程。
本文为将详细介绍EV3各个编程模块基础用法:绿色动作组绿色动作组—中型电机及大型电机模块左侧的下拉菜单拉开后,有五种操作状态:其中关闭可以让马达强制停车,1圈=360°。
第二个控制功率,功率有正负之分,分别控制向前/后行走。
第三个是对运行时间(或路程)的控制,因为有摩擦力作用,可以将数值略微调大。
第四个控制最后是否制动,区别在于制动则行驶路程较精准,不制动(EV3软件中将其称之惯性滑行)停的较缓慢,不突然。
绿色动作组—移动转向模块注意:第二个控制转弯角度时将角度调的(接近)100是往往用来调头的。
绿色动作组—移动槽模块相当于把两个大型电机模块拼在一块。
绿色动作组—显示模块第二个擦除屏幕的意思是显示新的内容前,擦去旧的,系统默认擦除屏幕。
大写的X和Y组合形成一个点,X,Y分别代表屏幕上的坐标系中的横坐标和纵坐标,X=0,Y=0时则说明此时图像将显示在坐标(即屏幕)中心上。
绿色动作组—声音模块注意:这里最右侧下拉框的等待完成是可以阻塞程序的。
绿色动作组—程序块状态灯模块控制灯亮不亮,亮的话是什么颜色,闪不闪烁。
橙色流程控制组橙色流程控制组—开始模块在将EV3主机与电脑连接后,单击绿三角可以使主机自动运行程序。
橙色流程控制组—等待模块等待模块有两类用法:第一个是等某个时间再进行第二个就是结合传感器数值做出逻辑判断,最右侧多数输出的是逻辑的真或伪,不是具体数值,这里必须注意。
注意:31313配的那个测距离的传感器叫红外传感器别搞错了。
特别注意:后面的黄色传感器组也有比较真实测量值与设定值输出逻辑关系的功能,差别大体上在是否阻碍程序。
橙色流程控制组—循环模块循环模块内部的模块会按照设定重复执行。
时间和计数退出就是到了就自动退出。
逻辑退出:假如事先设定逻辑判定为真时退出,连线接入判定口(最右侧的那个)后如果输出真,则退出;反之亦然。
第二课认识乐高蓝牙机器人系统____NXT授课时间参加教师活动目的:1、? 认识NXT主要配件,并将其与RCX核心配件作比较,学习和掌握新型乐高机器人;2、? 搭建蓝牙机器人;3、? 知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、????? 乐高机器人—— MINDSTORMS NXT与RCX的比较1、处理器由8位升到32位丹麦乐高(LEGO)将于2006年9月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGO Mindstorms NXT”。
Mindstorm s是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8位,而NXT配备32位处理器等,提高了性能。
表格1列出RCX和NXT的比较。
图1:安装4个传感器和3个伺服马达的LEGO NXT图4:LEGO NXT系统目前提供的4种传感器全家福5、改进了编程软件NXT程序用软件“ROBOLAB ,跟ROBOLAB原来的版本一样,是基于NI LabVIEW开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近400个图标进行编程,这次减少为约40个,从而使得编程更为简单。
OS为“Windows2000”以上和“Mac OS X”。
图5:乐高网站给出的ROBOLAB 的样图,跟以前版本相比,变化较大二、? 快速认识NXT1、? 按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、? NXT显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“My Files我的文件”、“Try me测试”、“Settings设置”、“Bl uetooth蓝牙”、“View查看”、“NXT Program NXT程序”。
乐高ev3机器人初级教程:编程模块基础用法指南乐高ev3机器人基于图形化编程,所见即所得,它最大的特点是无需使用计算机就可以编程。
本文为将详细介绍EV3各个编程模块基础用法:绿色动作组绿色动作组—中型电机及大型电机模块左侧的下拉菜单拉开后,有五种操作状态:其中关闭可以让马达强制停车,1圈=360°。
第二个控制功率,功率有正负之分,分别控制向前/后行走。
第三个是对运行时间(或路程)的控制,因为有摩擦力作用,可以将数值略微调大。
第四个控制最后是否制动,区别在于制动则行驶路程较精准,不制动(EV3软件中将其称之惯性滑行)停的较缓慢,不突然。
绿色动作组—移动转向模块注意:第二个控制转弯角度时将角度调的(接近)100是往往用来调头的。
绿色动作组—移动槽模块相当于把两个大型电机模块拼在一块。
绿色动作组—显示模块第二个擦除屏幕的意思是显示新的内容前,擦去旧的,系统默认擦除屏幕。
大写的X和Y组合形成一个点,X,Y分别代表屏幕上的坐标系中的横坐标和纵坐标,X=0,Y=0时则说明此时图像将显示在坐标(即屏幕)中心上。
绿色动作组—声音模块注意:这里最右侧下拉框的等待完成是可以阻塞程序的。
绿色动作组—程序块状态灯模块控制灯亮不亮,亮的话是什么颜色,闪不闪烁。
橙色流程控制组橙色流程控制组—开始模块在将EV3主机与电脑连接后,单击绿三角可以使主机自动运行程序。
橙色流程控制组—等待模块等待模块有两类用法:第一个是等某个时间再进行第二个就是结合传感器数值做出逻辑判断,最右侧多数输出的是逻辑的真或伪,不是具体数值,这里必须注意。
注意:31313配的那个测距离的传感器叫红外传感器别搞错了。
特别注意:后面的黄色传感器组也有比较真实测量值与设定值输出逻辑关系的功能,差别大体上在是否阻碍程序。
橙色流程控制组—循环模块循环模块内部的模块会按照设定重复执行。
时间和计数退出就是到了就自动退出。
逻辑退出:假如事先设定逻辑判定为真时退出,连线接入判定口(最右侧的那个)后如果输出真,则退出;反之亦然。