6控制系统设计实例
- 格式:ppt
- 大小:1.31 MB
- 文档页数:68
实验6:气体压力PID单回路控制系统的设计与整定1、测试实验目的1)掌握压力PID单回路控制系统的常用方法。
2)熟悉压力PID单回路控制系统组态。
3)掌握压力PID控制器参数整定方法。
2、实验原理1)压力作用于单位面积上的垂直力,工程上称为压力,物理学中称为压强。
压力依据零点参考压力的不同,分为绝对压力、表压力、压力差、负压力(真空)和真空度。
绝对压力:以完全真空为零标准所表示的压力。
表压力:以大气压为零标准所表示的压力,等于高于大气压力的绝对压力与大气压力之差。
大气压力:一个标准大气压是在纬度45度,温度为0℃,重力加速度为9.80665m/s2海平面上,空气气柱重量所产生的绝对压力,其值是101325Pa。
压差:除大气压力以外的任意两个压力的差值。
负压:绝对压力小于大气压时,大气压力与绝对压力之差为负压。
负压的绝对值称为真空。
真空度:绝对压力小于大气压时的绝对压力。
压力测量常用的单位有:①帕斯卡(Pa),其物理意义是,1牛顿的力作用于1平方米的面积上的压强(力)。
工程中常用MPa表示压力,1 MPa=106 Pa,②工程大气压(kgf/cm2),垂直作用于每平方厘米面积上的力,以公斤数为计量单位。
工程上常用kg/cm2表示。
1 kgf/cm2=9.80665×105 Pa=0.980665 MPa。
③物理大气压(atm),即上面所述的标准大气压。
④毫米汞柱(mmHg)、毫米水柱(mmH2O),垂直作用于底面积上的水银柱或水柱的高度为计量单位。
1 atm=760 mmHg。
许多生产过程都是在不同的压力下进行的,有些需要很高的压力,例如,高压聚乙烯、合成氨生产过程等,有些需要很高的真空度。
压力是化学反应的重要参数,不但影响到反应平衡关系,也影响到反应速率。
生产过程中的其它参数也经常通过压力间接测量,例如,流量、液位、温度等可以转换为压力进行测量。
2)压力的测量压力(压差)的测量方法主要有,液体式、弹性式、活塞式、电动式(电感、电容、电位、应变、压电、霍尔、力平衡、电涡流等)、气动式、光学式(光纤、光干涉、光电、激光等)。

武汉理工大学华夏学院课程设计课程名称单片机原理及应用课程设计题目小车循迹控制系统设计(路线6)专业软件工程班级软件1111班学号10212811123姓名成绩_________________ _指导教师夏婷20 14 年7 月 2 日课程设计任务书学生姓名:专业班级:软件1111班指导教师:夏婷工作单位:信息工程系设计题目:小车循迹控制系统设计(路线6)初始条件:1、硬件设备:MCS-51单片机最小系统板、四个QTI传感器、两个舵机、两个车轮、锂电池、ISP下载线、面包板;2、软件环境:Keil C51、progisp下载器。
设计任务:(在规定的时间内完成下列任务)1.完成硬件设计并连线,以MCS-51单片机为控制核心,根据4个QTI传感器采集到的数据控制舵机的运转,进而控制车轮的速度和方向,并画出硬件原理图和实验连线图;2.用C语言编程实现以下小车行驶线路(地图见下页):起始点→中心点→A点,旋转360度→黄色点,旋转180度→原路返回。
时间安排:各时间段的任务可以交替进行设计报告撰写格式要求:(按提供的设计报告统一格式撰写)设计报告应包含以下内容:①设计任务与要求②总体方案与说明③硬件原理图与说明④实验接线图与说明⑤软件主要模块流程图与说明⑥核心代码与注释⑦系统调式、问题分析与解决方案;⑧使用说明⑨小结与体会⑩参考文献附录:源程序(必须有简单注释)指导教师签名:2014 年 6 月30 日教研室主任(或责任教师)签名:2014年 6 月30 日目录起始点目录第1章需求分析 (1)1.1设计题目 (1)1.2设计任务及要求 (1)1.2.1总体任务 (1)1.2.2个人任务 (1)1.2.3设计要求 (1)1.3 软硬件运行环境及开发工具 (1)第2章概要设计 (2)2.1 设计原理 (2)2.1.1硬件设计原理 (2)2.1.2软件设计原理 (2)2.2实现方法 (2)2.2.1前进功能实现 (2)2.2.2 左转135度的实现 (2)2.2.3旋转功能实现 (2)2.2.4 小车左转90度的实现 (3)2.2.5 小车修正功能的实现 (3)第3章详细设计 (3)3.1硬件设计与实现 (3)3.2系统主程序流程图 (3)3.2.1 主程序流程图 (3)3.2.2 小车到E点后旋转360度的详细流程图: (5)3.3软件设计 (5)3.3.1起始点到蓝点路线模块设计 (5)3.3.2蓝点到E点路线模块设计 (6)3.3.3E点到中心点路线模块设计 (6)3.3.4中心点到起始点路线模块设计 (6)第4章系统调试与操作说明 (7)4.1 系统调试 (7)4.1.1直线调试 (7)4.1.2到达E点旋转360度调试 (7)4.2 问题分析与解决 (7)4.3 操作说明 (7)第5章总结和体会 (8)参考文献: (8)附录: (9)第1章需求分析1.1设计题目小车循迹控制系统设计(路线6)1.2设计任务及要求1.2.1总体任务1.完成硬件设计并连线,以MCS-51单片机为控制核心,根据4个QTI传感器采集到的数据控制舵机的运转,进而控制车轮的速度和方向,并画出硬件原理图和实验连线图;2.用C语言编程实现以下小车行驶线路(地图见下页):起始点→蓝点→E点,旋转360度→中心点→起始点。
六自由度机械臂结构设计1. 引言机械臂是一种能够模拟人类手臂运动的机器装置,广泛应用于工业生产、医疗护理、科学研究等领域。
六自由度机械臂是指机械臂具有六个独立的自由度,即可以在空间中进行六个方向的运动。
本文将介绍六自由度机械臂的结构设计方法和原理。
2. 六自由度机械臂的基本结构六自由度机械臂由底座、臂1、臂2、臂3、臂4和臂5组成。
底座固定在工作台上,臂1与底座相连,臂2与臂1相连,以此类推,形成一个连杆机构。
在每个连接处都安装了关节,使机械臂能够在各个连接点上进行转动。
3. 关节类型的选择在设计六自由度机械臂时,需要选择适合的关节类型。
常见的关节类型有旋转关节和直线关节。
旋转关节允许机械臂在一个平面内进行旋转运动,直线关节允许机械臂在直线方向上进行运动。
根据机械臂的运动需求,可以选择合适的关节类型。
4. 关节驱动系统设计关节驱动系统是机械臂的核心部分,决定了机械臂的运动性能。
常见的关节驱动系统有电机驱动和液压驱动。
电机驱动适用于小型机械臂,具有结构简单、易于控制的优点。
液压驱动适用于大型机械臂,具有承载能力强、运动平稳的优点。
根据机械臂的负载和运动要求,选择适合的关节驱动系统。
5. 机械臂末端工具设计机械臂的末端工具是机械臂的功能扩展部分,用于在工作过程中完成特定的任务。
末端工具的设计需要根据具体的应用需求来确定。
常见的末端工具包括夹具、吸盘、焊枪等。
根据机械臂需要完成的任务,选择适合的末端工具。
6. 控制系统设计机械臂的控制系统是保证机械臂正常工作和实现精确控制的关键部分。
常见的控制系统包括伺服控制系统和PLC控制系统。
伺服控制系统适用于对机械臂运动轨迹要求较高的场景,PLC控制系统适用于对机械臂进行逻辑控制的场景。
根据机械臂的应用需求,选择适合的控制系统。
7. 结论本文介绍了六自由度机械臂的结构设计方法和原理。
通过选择适合的关节类型和关节驱动系统,设计合理的末端工具和控制系统,可以使机械臂实现各个方向的运动,并完成特定任务。
第6章 过程控制系统的应用实例6.1 精馏塔的控制精馏是石油化工、炼油生产过程中的一个十分重要的环节,其目的是将混合物中各组分分离出来,达到规定的纯度。
精馏过程的实质就是迫使混合物的气、液两相在塔体中作逆向流动,利用混合液中各组分具有不同的挥发度,在互相接触的过程中,液相中的轻组分逐渐转入气相,而气相中的重组分则逐渐进入液相,从而实现液体混合物的分离。
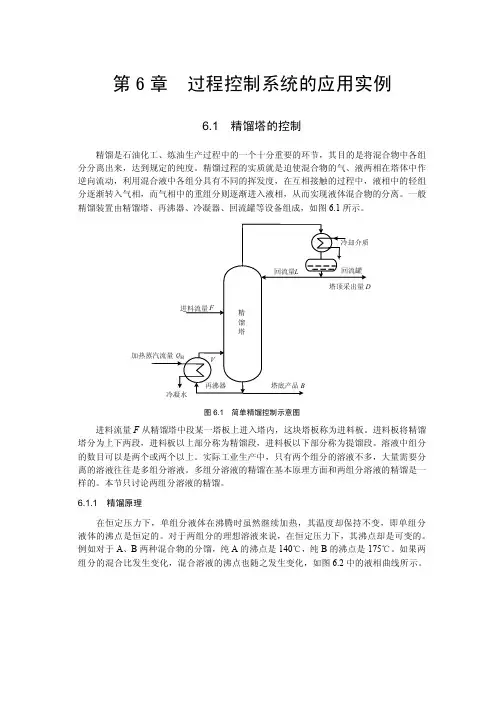
一般精馏装置由精馏塔、再沸器、冷凝器、回流罐等设备组成,如图6.1所示。
图6.1 简单精馏控制示意图进料流量F从精馏塔中段某一塔板上进入塔内,这块塔板称为进料板。
进料板将精馏塔分为上下两段,进料板以上部分称为精馏段,进料板以下部分称为提馏段。
溶液中组分的数目可以是两个或两个以上。
实际工业生产中,只有两个组分的溶液不多,大量需要分离的溶液往往是多组分溶液。
多组分溶液的精馏在基本原理方面和两组分溶液的精馏是一样的。
本节只讨论两组分溶液的精馏。
6.1.1 精馏原理在恒定压力下,单组分液体在沸腾时虽然继续加热,其温度却保持不变,即单组分液体的沸点是恒定的。
对于两组分的理想溶液来说,在恒定压力下,其沸点却是可变的。
例如对于A、B两种混合物的分馏,纯A的沸点是140℃,纯B的沸点是175℃。
如果两组分的混合比发生变化,混合溶液的沸点也随之发生变化,如图6.2中的液相曲线所示。
第6章 过程控制系统的应用实例·333··333·150140160170180020406080100100806040200A :B :组分/(%)温度/℃图6.2 A 、B 两组分混合物温度-浓度曲线设原溶液中A 占20%,B 占80%,此混合液的沸点是164.5℃,加热使混合液体沸腾。
这时,与液相共存的气相组分比是A 占45.8%,B 占54.2%。
这些气体单独冷凝后所形成的混合液体中,A 占45.8%,B 占54.2%;如果使此冷凝后的混合液体沸腾,其沸点是154.5℃。
青岛版小学信息技术六年级下册《控制系统与智能控制》教案
青岛版小学信息技术六年级下册《控制系统与智能控制》教案
第五单元:控制技术初步第二课:控制系统与智能控制
教学目标
知识目标
了解控制系统的构成,简单了解智能控制系统在生活中的应用;简单了解智能机器人。
能力目标
能够分析觉的控制系统组成要素;能解释常见的智能控制现象。
情感目标
进一步体会控制技术对社会生产生活的影响,培养浓厚的学习兴趣,树立科学的技术态度。
教学重点
教学难点
控制系统的构成
能够分析常见控制系统的'组成要素
教学准备
调试凌波电子教室
教学过程
情境创设
激发兴趣
故事导入:阿里巴巴和四十大盗的故事
自主探究
交流分享
自学课本P64-67
探究
1、控制系统的一般构成
自动门的工作原理及系统构成
红外探测器、控制器、电动机、门
电冰箱的工作过程及系统构成
2、智能控制技术与智能机器人
智能控制技术的研究对象、研究目标
智能控制技术的应用和研究领域
合作学习
释疑解难
1、与自动控制门的工作相比,冰箱对外界信息的检测多了哪些环节?
2、根据智能控制技术的特点,想一想生活中还有哪些智能控制技术的应用?
实践创作
展示评价
1、以“我与机器人”为主题,设想一下自己的未来生活,写一个演讲稿,讲给同学们听。
2、自动门不分好人坏人都让进,请改进一下自动门的功能,让它更安全一些。
梳理总结
拓展延伸
这节课你学会了哪些东西?给我们分享一下吧。
前言随着现代通信、电子技术和计算机技术的不断创新和发展,为人类社会的发展和生产带来了极大的便利。
因现在的电话网络遍布城乡各地,同时如何利用现代的科学技术去改善人类的生活,使人们的生活更加的舒适、方便。
从而产生一种利用公共电话网的DTMF远程控制设计的构想,实现对各种家用设备远程遥控。
DTMF远程控制装置是以AT89C51为单片机作为控制核心,MT8870为DTMF信号接收电路,在系统程序控制下实现功能,它由电话振铃检测模块,电话自动摘机、挂机控制电路和阻抗匹配电路,DTMF译码模块,语音存储模块和功放模块,以及微处理器控制和驱动电路模块六大部分组成。
DTMF远程控制系统于家庭,无人场所,工业现场等。
由于该系统的设计,是利用现有的电话网络资源与集成现代电子技术、通信技术、微处理技术与遥控技术于一体,它为出门在外旅游的人们,因总惦记家里的安危,想不用回家就可以开关家里的电器设备,造成有人在家的假象,保证家里的安全、也可为工作了一天的人们提早准备了浴水,使你尽情释放一天的疲劳;提早准备了香喷喷的饭菜;提早打开空调,一进门便能享受清凉的的世界…,为人们省去了多少的麻烦,带来了多少的便利。
同时又由于采用的基于公共电话网新型的遥控方式,而常规的有线遥控需进行专门的布线,增加了投入;而红外线、超声波遥控则受距离所限。
现有的遥控方式中,还有载波通信控制手段和基于无线寻呼的遥控方式。
载波方式即通过电力线传递信息,该方式只能局限于同一变电所、同一变压器所辖范围内。
因此也存在距离问题,应用范围有限。
基于无线寻呼的遥控方式利用了现有的寻呼频率资源,不需占用额外的频谱。
因此它比起这一些的常规的遥控方式显示出了一定不可比拟优越性。
它不需占用了一定的频率资源,也不会造成电磁干扰以及电磁污染,又突破常见的遥控方式的空间界限,可跨越省市,甚至跨越国家。
又由于本装置采用电话线网络作为媒介及并接在电话机的两端,且不占据电话线的资源,又充分地利用了电话这一种己经比较成熟的双工通信方式,通过电话的语音提示的信息,从而使操作者能够及时了解受控方信息,使产品达到交互式与智能化。