机械原理(第七版) 孙桓主编 第3章
- 格式:doc
- 大小:1.59 MB
- 文档页数:36

第1章绪论1.1复习笔记一、本课程研究的对象及内容1.本课程研究的对象本课程研究的对象是机械,机械是机器和机构的总称。
(1)机构是用来传递与变换运动和力的可动装置。
(2)机器是根据某种使用要求而设计的用来变换或传递能量、物料和信息的执行机械运动的装置,机器都是由各种机构组合而成的。
2.本书研究的内容本书研究的内容是有关机械的基本理论问题,具体包括以下几个方面:(1)机构结构分析的基本知识;(2)机构的运动分析;(3)机器动力学;(4)常用机构的分析与设计;(5)机械系统的方案设计。
二、学习机械原理课程的目的(1)机械工业是国家综合国力发展的基石,本课程是机械类专业的重要基础课程而且本课程的内容是有关机械的基础知识。
(2)为了创造出满足人们需求的新产品,需要创造型人才,而机械原理课程在培养机械方面的创造型人才中将起到不可或缺的重要作用。
三、如何进行机械原理课程的学习(1)搞清基本概念,理解基本原理,掌握机构分析和综合的基本方法。
(2)明确机械原理课程中对机械的研究的两大内容:①研究各种机构和机器所具有的一般共性问题;②研究各种机器中常用的一些机构的性能及其设计方法,以及机械系统方案设计的问题。
(3)培养自己运用所学的基本理论和方法去发现、分析和解决工程实际问题的能力,着重培养自己的创新精神和能力。
(4)坚持科学严谨的工作作风,认真负责的工作态度,讲求实效的工程观点。
四、机械原理学科发展现状简介现代机械的发展日新月异,对机械提出的要求越来越苛刻。
为适应生产发展的需要,当前在各类型机构和机械驱动方面的研究上取得了很大的进展。
在机械的分析和综合中日益广泛地应用了计算机并加强了对机械的实验研究。
总之,作为机械原理学科,其研究领域十分广阔,内涵非常丰富。
1.2课后习题详解本章无课后习题。
1.3名校考研真题详解本章内容只是对整个课程的一个总体介绍,基本上没有学校的考研试题涉及到本章内容,读者简单了解即可,不必作为复习重点,所以本部分也就没有选用考研真题。
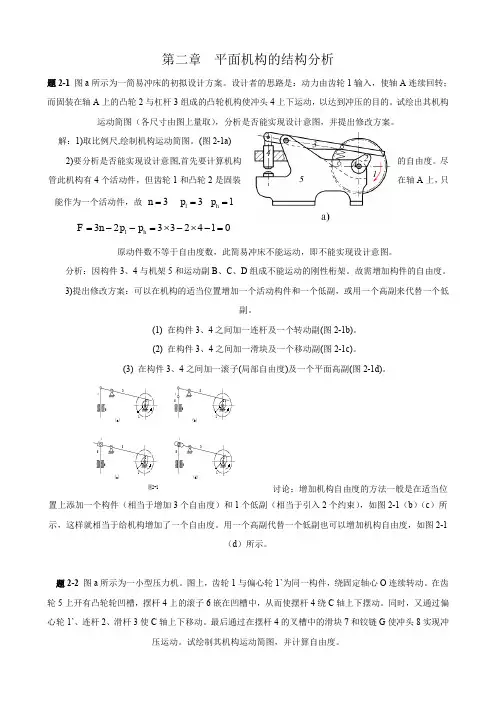
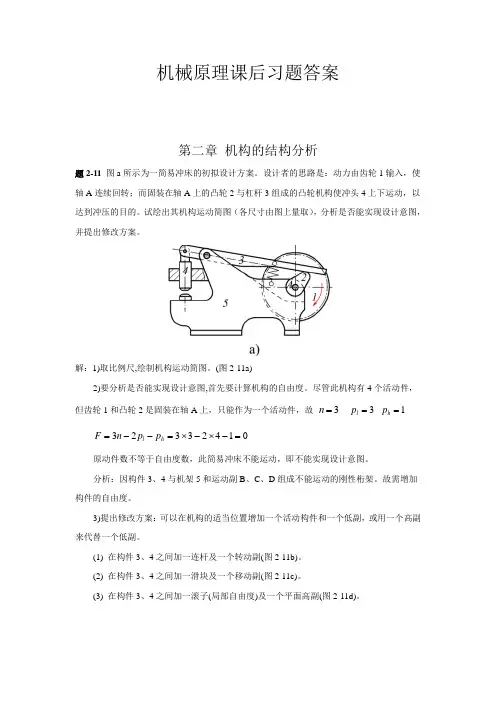
机械原理课后习题答案第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。

机械原理习题选解武秀东2007年6月教材:普通高等教育“十五”国家级规划教材机械原理(第七版)西北工业大学机械原理及机械零件教研室编孙桓陈作模葛文杰主编高等教育出版社本教材第四版曾获全国第二届高等学校优秀教材优秀奖本教材第五版曾获教育部科技进步奖二等奖第二章 机构的结构分析2-11. 图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案(要求用机构示意图表示出来)。
解⑴分析:绘制机构运动简图沿着运动传递的路线,根据各个活动构件参与构成运动副的情况(两构件组成的运动副的类型,取决于两构件之间的相对运动关系),确定表示各个构件的符号,再将各个构件符号连接起来,就得到机构运动简图(或机构示意图)。
构件2:与机架5构成转动副A ;与构件3构成凸轮高副。
所以构件2的符号为图a)。
构件3:与构件2构成凸轮高副;与机架5构成转动副;与机架4构成转动副。
所以构件3的符号为图b)。
构件4:与机架3构成转动副;与机架5构成移动副。
所以构件4的符号为图c)或图d)。
将这些构件符号依次连接起来,就得到机构运动简图,如题2-11答图a)或b)所示。
机构运动简图,如题2-11答图a)或b)所示。
⑵分析:是否能实现设计意图在机构的结构分析中判断该方案否能实现设计意图,应该从以下两点考虑:①机构自由度是否大于零;②机构原动件的数目是否等于机构自由度的数目。
因此,必须计算该机构的自由度F=3n-(2p L +p H )=3×3-(2×4+1)=0。
因为机构的自由度为 F=3n-(2p L +p H )=3×3-(2×4+1)=0 可知,该机构不能运动,不能实现设计意图。
题2-11图图a)图b)图c)题2-11答图a)b)⑶分析修改方案因为原动件的数目为1,所以修改的思路为:将机构的自由度由0变为1。
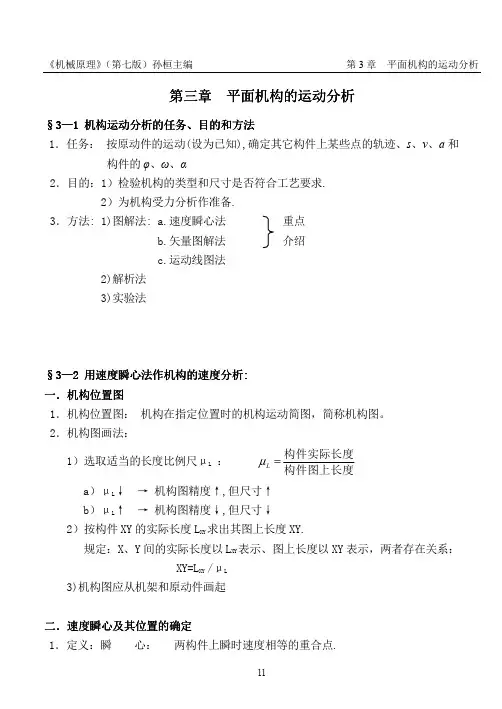
第三章第三章 平面机构的运动分析平面机构的运动分析平面机构的运动分析§3—1 1 机构运动分析的任务机构运动分析的任务机构运动分析的任务、、目的和方法目的和方法1.任务: 按原动件的运动(设为已知),确定其它构件上某些点的轨迹、s 、v 、a 和构件的φ、ω、α2.目的:1)检验机构的类型和尺寸是否符合工艺要求.2)为机构受力分析作准备.3.方法: 1)图解法: a.速度瞬心法 重点b.矢量图解法 介绍c.运动线图法2)解析法 3)实验法§3—2 用速度瞬心法作机构的速度分析用速度瞬心法作机构的速度分析:: 一.机构位置图机构位置图1.机构位置图: 机构在指定位置时的机构运动简图,简称机构图。
2.机构图画法:1)选取适当的长度比例尺μL : 构件图上长度构件实际长度=L µa)μL ↓ → 机构图精度↑,但尺寸↑ b)μL ↑ → 机构图精度↓,但尺寸↓ 2)按构件XY 的实际长度L XY 求出其图上长度XY.规定:X、Y 间的实际长度以L XY 表示、图上长度以XY 表示,两者存在关系:XY=L XY /μL3)机构图应从机架和原动件画起二.速度瞬心速度瞬心及其位置的确定及其位置的确定及其位置的确定1.定义:瞬 心: 两构件上瞬时速度相等的重合点.绝对瞬心: 速度为零的等速重合点. 相对瞬心: 速度不为零的等速重合点.2.瞬心符号P ij :表示i 和j 两构件的瞬心.3.瞬心数目K: 由N 个构件(含机架)组成的机构的瞬心总数K 为(1)2K =−4.瞬心求法:(见下图)1)已知两构件上两个重合点的相对速度: 瞬心在两相对速度垂线的交点处 2)两构件组成转动副: 瞬心在转动副中心3)两构件组成移动副: 瞬心在导路垂直方向上无穷远处4)两构件组成平面高副: 纯 滚 动: 瞬心在两高副元素接触点.既滚又滑: 瞬心在接触点公法线n-n 上某处5)三心定理: 三个平面运动件共有三个瞬心,它们位于同一直线上(证明略)P 1212P 12移动副2转动副纯滚动: 在接触点处既滚又滑: 在n-n线上P 12P 12例:求图示五杆机构的全部瞬心:12345P 12P P P P P P 233424131545P P P 35251445解:1)瞬心数 K=N(N-1)/2=5×(5-1)/2=102)作园,近似等分成N 点。
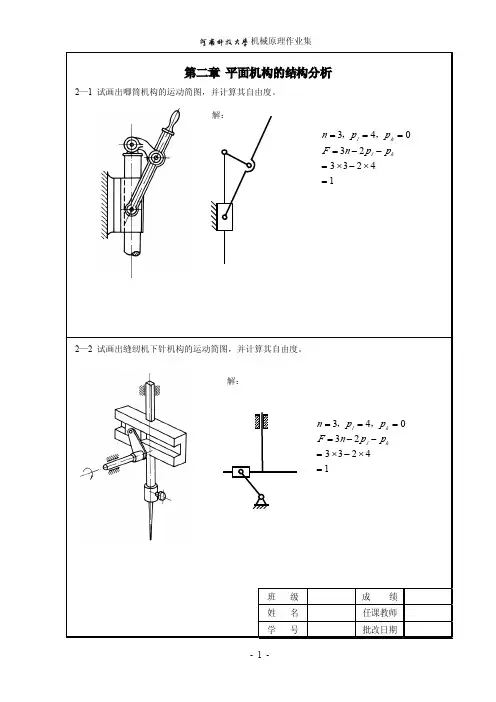
二、平面机构运动分析1.图示平面六杆机构的速度多边形中矢量ed代表,杆4角速度ω4的方向为时针方向。
题1图题6图2.当两个构件组成移动副时,其瞬心位于处。
当两构件组成纯滚动的高副时,其瞬心就在。
当求机构的不互相直接联接各构件间的瞬心时,可应用来求。
3.3个彼此作平面平行运动的构件间共有个速度瞬心,这几个瞬心必定位于上。
含有6个构件的平面机构,其速度瞬心共有个,其中有个是绝对瞬心,有个是相对瞬心。
4.相对瞬心与绝对瞬心的相同点是,不同点是。
5.速度比例尺的定义是,在比例尺单位相同的条件下,它的绝对值愈大,绘制出的速度多边形图形愈小。
6.图示为六杆机构的机构运动简图及速度多边形,图中矢量cd代表,杆3角速度ω3的方向为时针方向。
7.机构瞬心的数目N与机构的构件数k的关系是。
8.在机构运动分析图解法中,影像原理只适用于。
9.当两构件组成转动副时,其速度瞬心在处;组成移动副时,其速度瞬心在处;组成兼有相对滚动和滑动的平面高副时,其速度瞬心在上。
10.速度瞬心是两刚体上为零的重合点。
11.铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,个是相对瞬心。
12.速度影像的相似原理只能应用于各点,而不能应用于机构的的各点。
13.作相对运动的3个构件的3个瞬心必。
14.当两构件组成转动副时,其瞬心就是。
15.在摆动导杆机构中,当导杆和滑块的相对运动为动,牵连运动为动时,两构件的重合点之间将有哥氏加速度。
哥氏加速度的大小为;方向与的方向一致。
16.相对运动瞬心是相对运动两构件上为零的重合点。
17.车轮在地面上纯滚动并以常速v前进,则轮缘上K点的绝对加速度αK=αk n=V K n/KP。
---------------------------------------( )18.高副两元素之间相对运动有滚动和滑动时,其瞬心就在两元素的接触点。
---( )19.在图示机构中,已知ω1及机构尺寸,为求解C 2点的加速度,只要列出一个矢量方程a C2=a B2+a n C2B2+a t C2B2就可以用图解法将a C2求出。
------------------()题19图 题20图20.在讨论杆2和杆3上的瞬时重合点的速度和加速度关系时,可以选择任意点作为瞬时重合点。
-------------------------------------------------( )21.给定图示机构的位置图和速度多边形,则图示的a k B2B3的方向是对的。
-----( ) 2323k题21图 题22图22.图示机构中,因为v B1=v B2,a B1=a B2,所以a k B3B2=a B3B1=2ω1v B3B1。
---( )23.平面连杆机构的活动件数为n ,则可构成的机构瞬心数是n(n+1)/2。
----( )24.在同一构件上,任意两点的绝对加速度间的关系式中不包含哥氏加速度。
----( )25.当牵连运动为转动,相对运动是移动时,一定会产生哥氏加速度。
--------( )26.在平面机构中,不与机架直接相连的构件上任一点的绝对速度均不为零。
---( )27.两构件组成一般情况的高副即非纯滚动高副时,其瞬心就在高副接触点处。
--( )28.给定导杆机构在图示位置的速度多边形。
该瞬时a B2B3,v B2B3的正确组合应是图 。
B B 23B B 23B B 23B B 23B B 23B B 23B B 23B B 23k kkk29.给定图示六杆机构的加速度多边形,可得出(A)矢量c ’d’代表a CD ,α5是顺时针方向; (B)矢量c ’d ’代表a CD ,α5是逆时针方向;(C)矢量c ’d ’代表a CD ,α5是顺时针方向; (D)矢量c ’d ’代表a CD ,α5是逆时针方向。
题29图 题30图30.利用相对运动图解法来求解图示机构中滑块2上D 2点的速度v D2,解题过程的恰当步骤和利用的矢量方程可选择 。
(A)v B3=v B2+v B3B2,速度影像△pb 2d ~△CBD(B) v B3=v B2+v B3B2,速度影像△pb 2d ~△CBD(C)v D =v B +v DB ,v DB =l BD ×ω1(D)v C2=v C3+V C2C3=v B2+V C2B2,速度影像△c 2b 2d 2~△CBD31.作连续往复移动的构件,在行程的两端极限位置处,其运动状态必定是 。
(A)v=0,a=0 (B)v=0,a=max (C)v=0,a ≠0 (D)v ≠0,a ≠032.图示连杆机构中滑块2上E点的轨迹应是 。
(A)直线; (B)圆弧; (C)椭圆; (D)复杂平面曲线。
33.构件2和构件3组成移动副,则有关系(A)v B2B3=v C2C3; (B) v B2B3≠v C2C3, ω2=ω3;(C) v B2B3=v C2C3,ω2≠ω3; (D) v B2B3≠v C2C3, ω2≠ω3。
题32图题33图题34图题35图34.用速度影像法求杆3上与D2点重合的D3点速度时,可以使(A)△ABD~△pb2d2;(B)△CBD~△pb2d2;(C)△CBD~△pb3d3;(D)△CBD~△pb2d3。
35.图示凸轮机构中P12是凸轮1和从动件2的相对速度瞬心。
O为凸轮廓线在接触点处的曲率中心,则计算式是正确的。
(A)a n B2B1=v2B2/l BP12;(B) a n B2B1=v2B2/l BO;(C) a n B2B1=v2B2B1/l BP12;(D) a n B2B1=v2B2B1/l BO。
36.在两构件的相对速度瞬心处,瞬时重合点间的速度应有。
(A)两点间相对速度为零,但两点绝对速度不等于零;(B)两点间相对速度不等于零,但其中一点的绝对速度等于零;(C)两点间相对速度不等于零且两点的绝对速度也不等于零;(D)两点间的相对速度和绝对速度都等于零。
37.在图示连杆机构中,连杆2的运动是。
(A)平动;(B)瞬时平动;(C)瞬时绕轴B转动;(D)一般平面复合运动。
38.将机构位置图按实际杆长放大一倍绘制,选用的长度比例尺l应是。
(A)0.5mm/mm;(B)2mm/mm;(C)0.2mm/mm;(D)5mm/mm。
39.两构件作相对运动时,其瞬心是指。
(A)绝对速度等于零的重合点;(B)绝对速度和相对速度都等于零的重合点;(C)绝对速度不一定等于零但绝对速度相等或相对速度等于零的重合点。
40.下图是四种机构在某一瞬时的位置图。
在图示位置哥氏加速度不为零的机构为。
41.利用相对运动图解法求图示机构中滑块2上D 2点的速度v D2的解题过程的恰当步骤和利用的矢量方程为:(A)v B3=v B2+v B3B2,利用速度影像法△pb 2d ~△CBD ;(B)v B3=v B2+v B3B2,△pb 2d 2~△CBD ;(C)v D =v B +v DB ,式中v DB =l DB ω1(D)v B3=v B2+v B3B2,求出v B3后,再利用v D2=v B2+v D2B2。
题41图 题43图43.在图示曲柄滑块机构中,已知连杆长l=r+e ,(r 为曲柄长,e 为导路偏距),滑块行程是否等于22)(e l r -+?为什么?44.在机构图示位置时(AB ⊥BC)有无哥氏加速度a k C2C3?为什么?题44图 题46图45.已知铰链四杆机构的位置(图A)及其加速度矢量多边形(图B ),试根据图B 写出构件2与构件3的角加速度α2,α3的表达式,并在图A 上标出它们的方向。
46.图示机构中已知ω1=100rad/s , α1=0,试分析ω3及α3为多大。
47.图示机构有无哥氏加速度a k B2B3?为什么?题47图题48图题50图48.图示为曲柄导杆机构,滑块2在导杆3(CD)中作相对滑动,AB为曲柄。
当在图示位置时,即曲柄AB (构件1)和导杆CD (构件3)重合时,有无哥氏加速度a k B2B3?为什么?49.什么叫机构运动线图?50.已知六杆机构各构件的尺寸、位置及原动件的角速度ω1常数,欲求ω5,α5。
如采用相对运动图解法时,此题的解题顺序应如何?51.图示为按比例尺绘制的牛头刨床机构运动简图和速度矢量多边形。
试由图中的比例尺计算导杆3的角速度ω3和滑块2的角速度ω2,并指出其方向。
(提示:S3为构件3上特殊点,据S3B⊥CD,S3D⊥v D求得,作题时不必去研究v S3如何求得。
)(取μL=0.005m/mm,μv=0.003m/s/mm)题51图题52图52.试求图示机构的速度瞬心数目、各瞬心位置、各构件角速度的大小和方向、杆2上点M的速度大小和方向。
(机构尺寸如图:r1=10mm,r2=20mm,l AB=30mm,l BC=67mm,∠BAx=45°,l BM=35mm,μL=0.001m/mm。
)已知ω1=30rad/s。
53.图示机构中尺寸已知(μL=0.05m/mm,机构1沿构件4作纯滚动,其上S点的速度为v S(μV=0.6m/S/mm)。
(1)在图上作出所有瞬心;(2)用瞬心法求出K点的速度v K。
题53图题54图54.画出图示机构的指定瞬心。
(1)全部瞬心。
(2)瞬心P24,P26。
55.在图示机构中,已知滚轮2与地面作纯滚动,构件3以已知速度v3向左移动,试用瞬心法求滑块5的速度v5的大小和方向,以及轮2的角速度ω2的大小和方向。
题55图题56图题57图56.已知图示机构的尺寸和位置。
当ω1=0时,试用瞬心法求i35。
57.在图示机构中,已知构件1以ω1沿顺时针方向转动,试用瞬心法求构件2的角速度ω2和构件4的速度v4的大小(只需写出表达式)及方向。
58.图示齿轮 连杆机构中,已知齿轮2和5的齿数相等,即z2=z5,齿轮2以ω2=100rad/s 顺时针方向转动,试用瞬心法求构件3的角速度ω3的大小和方向。
(取μL=0.001m/mm)题58图题59图题60图59.在图示机构中,已知原动件1以匀角速度ω1逆时针方向转动,试确定:(1)机构的v(需写出表达式)。
全部瞬心;(2)构件3的速度360.求图示五杆机构的全部瞬心,已知各杆长度均相等,ω1=ω4且ω1与ω4回转方向相反。
61.求图示机构的速度瞬心的数目,并在图中标出其中的12个瞬心。
题61图题62图题63图62.图示摆动导杆机构中,已知构件1以等角速度ω1=10rad/s顺时针方向转动,各构件尺寸l AB=15mm,l BC=25mm,φ1=60°试求:(1)构件1、3的相对瞬心;(2)构件3的角速度ω3;(3)构件2的角速度ω2。
63.画出图示机构的全部瞬心。
64.在图示机构中,已知凸轮1的角速度ω1的大小和方向,试用瞬心法求构件3的速度大小及方向。