实验四 SIMULINK仿真模型的建立及仿真(完整资料).doc
- 格式:doc
- 大小:180.50 KB
- 文档页数:10

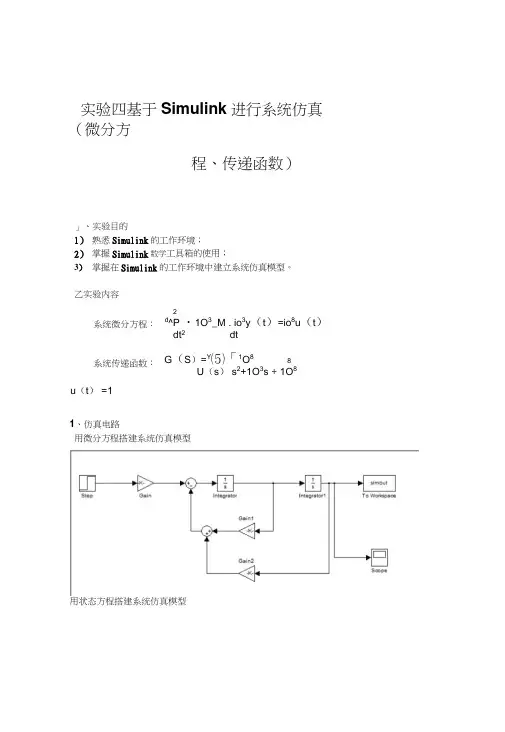
实验四基于Simulink进行系统仿真(微分方程、传递函数)」、实验目的1)熟悉Simulink的工作环境;2)掌握Simulink数学工具箱的使用;3)掌握在Simulink的工作环境中建立系统仿真模型。
乙实验内容系统微分方程:2d^P ・1O3_M . io3y(t)=io8u(t)dt2dt系统传递函数:G(S)=Y⑸「1O88U(s) s2+1O3s + 1O8 u(t) =11、仿真电路用微分方程搭建系统仿真模型用状态方程搭建系统仿真模型2、电路元件参数的设置1)设置Gain 参数■7) Function Block Parameters: Gai Gain2)设置Gainl参数X Element-wise gain (y = K* *uj or matrin gain Cy = K*u or y = 口*K)・3)设置Gain2的参数吕 Function Block Parameters: Gain2_________ __________________________________________________________________ GainElement-ifise gain Cy = K* *uj or mat r ix gain (y = K*u or y = u*K).Nlain Signal Att nbutes Paranet er kttribut BSGain: le8 Multiplication : Elejnent-wise(K, *u)Sample time 1 for inherited):-14)设置State-Space 的参数H ^unction Block Parameters: GainlApplyCancel磊=unction Block Parameters: State-Space5)设置Transfer Fcr t勺参数[Ie8]OK [1 le3 le8]3、仿真结果微分方程状态方程-unction Block Parameters: Tr^nsfer -cnTransfer FenParametersNmerator coefficients:Denominator coefficients :Absolut& tolerance ;autoHelp | ApplyCancel The numerator coefficient can be a vector or matrix expression ・ Thedenomiriator coefficient must be a vector ・ The output width equals theriumber uf rovs in the riumerator coefficient» You should specify the coefficients in descending order of powers of s.State Nane: (e. ? ' posit inn 7 )D(E传递函数4、仿真结果的分析用微分方程和状态方程搭建系统仿真模型的仿真结果一样,而用传递函数搭建系统仿真模型的仿真结果发散。
实验四 基于Simulink 机构运动分析学号 姓名一、实验任务和目的1. 熟悉Simulink 的工作环境,掌握模型建立方法。
2. 熟悉和掌握模块参数的设置和常用模块的使用方法。
3. 掌握利用Simulink 实现机构运动仿真的方法。
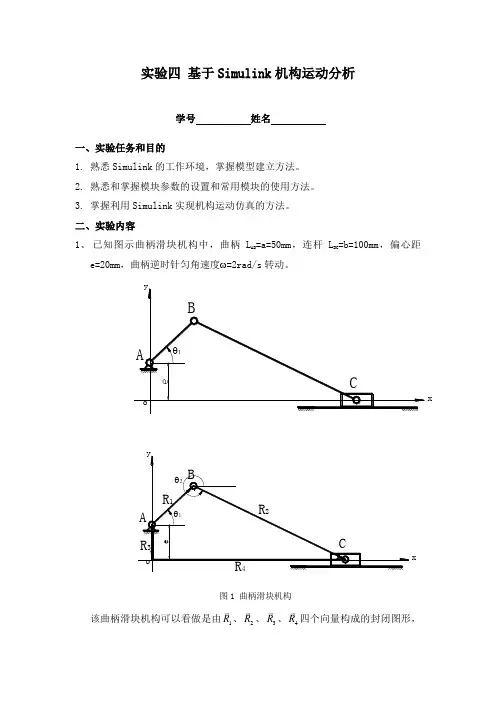
二、实验内容1、 已知图示曲柄滑块机构中,曲柄L AB =a=50mm ,连杆L BC =b=100mm ,偏心距e=20mm ,曲柄逆时针匀角速度ω=2rad/s 转动。
xx图1 曲柄滑块机构该曲柄滑块机构可以看做是由1R 、2R 、3R 、4R 四个向量构成的封闭图形,方向如图所示。
该机构的闭环位移矢量方程1234R R R R +=+上述矢量方程在x 和y 方向的投影方程1212cos cos (1)sin sin (2)c a b x a b eθθθθ+=⎧⎨+=-⎩ 对位移方程两边求一阶导数⎩⎨⎧=+=--)4(0cos cos )3(sin sin a 22112211θωθωθωθωb a v b C 上式可用于求解连杆角速度2ω和滑块速度C v⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--1111222cos sin 0cos 1sin θωθωωθθa a v b b C依此建立simulink 模型图2曲柄滑块机构Simulin 仿真模型其中(1) 计算连杆角速度和滑块速度的函数模块自定义函数模块vcslider.m源代码(2)计算连杆和滑块初始位置的函数模块自定义函数模块vcslider.m 源代码对上述曲柄滑块模型进行仿真。
2、 仿照上述曲柄滑块机构仿真方法,对图示曲柄摇杆机构进行建模仿真,要求用示波器显示CD 杆角位移4θ,角速度4ω和角加速度4α随曲柄转角(0~360°)变化曲线。
已知机构各构件尺寸100AB l mm =,200BC l mm =,200AD l mm =,150CD l mm =,原动件AB 以等角速度ω=10rad/s 逆时针方向转动,1θ初始位置为0。
第一章实验内容实验一Matlab语言的基础一、实验目的和要求1、掌握Matlab语言的基础知识,包括Matlab窗口环境的使用;2、矩阵运算及多项式处理;3、基本的绘图命令;4、程序设计入门。
二、实验内容:1、帮助命令使用help命令,查找sqrt(开方)函数的使用方法;2、矩阵运算(1)矩阵的乘法已知A=[1 2;3 4]; B=[5 5;7 8];求A^2*B(2)矩阵除法已知:A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3];求A\B,A/B(3)矩阵的转置及共轭转置已知:A=[5+i,2-i,1;6*i,4,9-i];求A.', A'(4)使用冒号选出指定元素已知:A=[1 2 3;4 5 6;7 8 9];求A中第3列前2个元素;A中所有列第2,3行的元素;3、多项式(1)求多项式p(x)=x3-2x-4的根(2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4] ,求矩阵A的特征多项式;4、 基本绘图命令(1)绘制余弦曲线y=cos(t),t ∈[0,2π] 。
(2)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5), t ∈[0,2π] 。
(3)方程)tan(sin )sin(tan x x y -=,x ∈[-π,π]试比较x=[-pi : 0.05 : pi]和x=[-pi : 0.05 : -1.8,-1.801 : .001: -1.2,-1.2 :0.05: 1.2, 1.201 : .001 : 1.8, 1.81:0.05 :pi]的曲线有何不同。
(4)Butterworth 低通滤波器的数学模型为nD v u D v u H 20]/),([11),(+=,其中02020,)()(),(D v v u u v u D -+-=为给定的区域半径,n 为阶次,u 0和v 0为区域的中心。
matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
simulink matlab 仿真环境教程Simulink 是面向框图的仿真软件。
演示一个Simulink 的简单程序【例1.1】创建一个正弦信号的仿真模型。
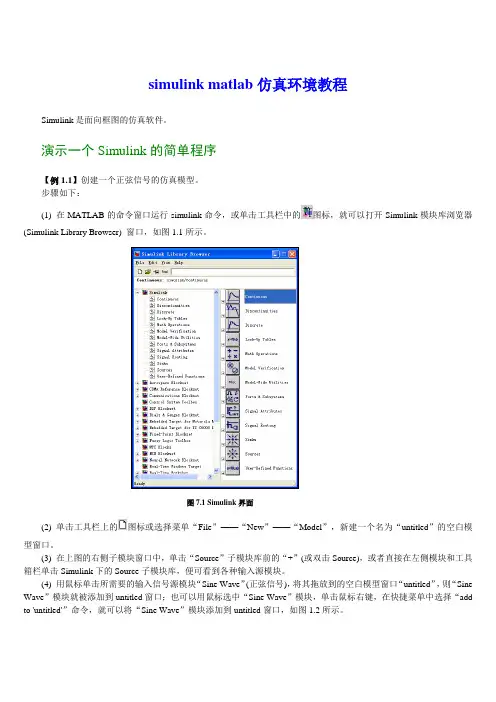
步骤如下:(1) 在MATLAB 的命令窗口运行simulink 命令,或单击工具栏中的图标,就可以打开Simulink 模块库浏览器(Simulink Library Browser) 窗口,如图1.1所示。
(2)单击工具栏上的图标或选择菜单“File ”——“New ”——“Model ”,新建一个名为“untitled ”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source ”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave ”(正弦信号),将其拖放到的空白模型窗口“untitled ”,则“Sine Wave ”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave ”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave ”模块添加到untitled 窗口,如图1.2所示。
图7.1 Simulink 界面(5) 用同样的方法打开接收模块库“Sinks ”,选择其中的“Scope ”模块(示波器)拖放到“untitled ”窗口中。
(6) 在“untitled ”窗口中,用鼠标指向“Sine Wave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图1.3所示。
(7) 开始仿真,单击“untitled ”模型窗口中“开始仿真”图标,或者选择菜单“Simulink ”——“Start ”,则仿真开始。
【实验名称】Simulink建模与仿真【实验目的】1.学习SIMULINK 软件工具的使用方法;2.用SIMULINK 仿真线性系统;【实验内容】1.SIMULINK简介SIMULINK是MATLAB软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB语言的主要区别在于,其与用户交互接口是基于Windows的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
所谓模型化图形输入是指SIMULINK提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl文件进行存取),进而进行仿真与分析。
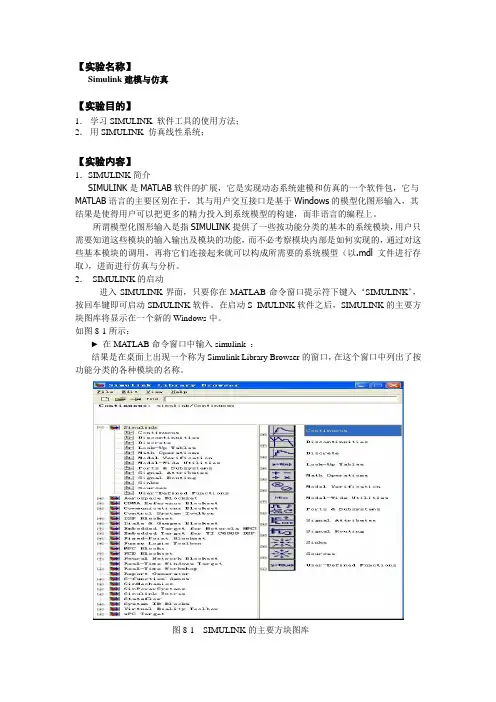
2.SIMULINK的启动进入SIMULINK界面,只要你在MA TLAB命令窗口提示符下键入‘SIMULINK’,按回车键即可启动SIMULINK软件。
在启动S IMULINK软件之后,SIMULINK的主要方块图库将显示在一个新的Windows中。
如图8-1所示:►在MA TLAB命令窗口中输入simulink :结果是在桌面上出现一个称为Simulink Library Browser的窗口,在这个窗口中列出了按功能分类的各种模块的名称。
图8-1 SIMULINK的主要方块图库3.SIMULINK的模块库介绍►SIMILINK模块库按功能进行分为以下8类子库:Continuous(连续模块)Discrete(离散模块)Function&Tables(函数和平台模块)Math(数学模块)Nonlinear(非线性模块)Signals&Systems(信号和系统模块)Sinks(接收器模块)Sources(输入源模块)4.SIMULINK简单模型的建立(1)建立模型窗口(2)将功能模块由模块库窗口复制到模型窗口(3)对模块进行连接,从而构成需要的系统模型5.SIMULINK功能模块的处理(1)模块库中的模块可以直接用鼠标进行拖曳(选中模块,按住鼠标左键不放)而放到模型窗口中进行处理。
《现代机械工程基础实验》之机械工程控制基础综合实验报告姓名学号班级山东建筑大学机电工程学院2012.06.04~06第二部分Simulink方法及仿真实验一、开环系统1、如图所示,开环系统是积分环节的开环系统。
当输入信号分别是方波信号和正弦信号时,分析输出信号的波形。
积分环节的特点是输出量为输入量对时间的累积,输出幅值呈线性增长。
经过时间的累积后,当输入信号为零时,输出量不再增加且该值保持不变,即是具有记忆的功能。
(a)输入信号是方波信号输入信号波形图输出信号波形图分析:当输入信号时方波信号时,输出信号等于对方波信号时间的累积。
当方波信号在高电位时,输出为线性增长;当方波信号在零电位时,输出信号不增加,并且是保持不变的,因此是一条直线,在时间的积累下,输出信号就是如图所示的波形。
(b) 输入信号是正弦信号输入信号波形图输出信号波形图分析:当输入信号时正弦波信号时,输出信号也是输入信号对时间的累积。
当正弦波在上半部分时,输出信号不断增大;当在1/2周期时,输出信号达到最大值;当正弦波在下半周期时,输出信号因为对负值的不断累积而减小,在一个周期时为0。
因为可以得出输出信号的波形图如上图所示。
2、如图所示,开环系统是一阶惯性环节的开环系统。
当输入信号分别是方波信号和正弦信号时,分析输出信号的波形。
一阶惯性环节逇输出需要延迟一段时间才能够接近所要求的输出量,但是它也是从输入开始的时候就有了输出。
如图所示的一阶惯性环节,因此输出量的最大值应该时输出量的1/2。
(a)输入信号是方波信号输入信号波形图输出信号波形图分析:当输入信号是方波信号时,输出量一开始就有了,且从0开始逐渐增大,当达到1/2周期时,输出量达到了最大值;当方波信号为零电位时,输出量有不断减小,在一个周期时变为0,如此周期变化下去,因此可以得到输出信号的波形图如图所示。
(b)输入信号是阶跃信号输入信号波形图输出信号波形图分析:当输入信号是阶跃信号时,在输入信号时零电位时,输出量为0;当输入信号阶跃变为高电位时,输出信号不立刻变化,而是缓慢的变化达到最大值,最后保持不变。
MATLAB/Simulink 电力系统建模与仿真实验报告姓名:******专业:电气工程及其自动化班级:*******************学号:*******************实验一无穷大功率电源供电系统三相短路仿真1.1 无穷大功率电源供电系统仿真模型构建运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块:(1)无穷大功率电源模块(Three-phase source)(2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load)(3)三相串联RLC支路模块(Three-Phase Series RLC Branch)(4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings))(5)三相电压电流测量模块(Three-Phase V-I Measurement)(6)三相故障设置模块(Three-Phase Fault)(7)示波器模块(Scope)(8)电力系统图形用户界面(Powergui)按电路原理图连接线路得到仿真图如下:1.2 无穷大功率电源供电系统仿真参数设置1.2.1 电源模块设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:1.2.2 变压器模块变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图:1.2.3 输电线路模块根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图:1.2.4 三相电压电流测量模块此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:1.2.5 故障设置模块勾选故障相A、B、C,设置短路电阻0.00001Ω,设置0.02s—0.2s发生短路故障,参数设置如下图:1.2.6 示波器模块为了得到仿真结果准确数值,可将示波器模块的“Data History”栏设置为下图所示:1.3 无穷大功率电源供电系统仿真结果及分析得到以上的电力系统参数后,可以首先计算出在变压器低压母线发生三相短路故障时短路电流周期分量幅值和冲击电流的大小,短路电流周期分量的幅值为Im=10.63kA,时间常数Ta=0.0211s,则短路冲击电流为Iim=17.3kA。
【最新整理,下载后即可编辑】
实验四SIMULINK仿真模型的建立及仿真(一)
一、实验目的:
1、熟悉SIMULINK模型文件的操作。
2、熟悉SIMULINK建模的有关库及示波器的使用。
3、熟悉Simulink仿真模型的建立。
4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。
二、实验内容:
1、设计SIMULINK仿真模型。
2、建立SIMULINK结构图仿真模型。
3、了解各模块参数的设定。
4、了解示波器的使用方法。
5、了解参数、算法、仿真时间的设定方法。
例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。
弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK模型,并进行仿真运行。
步骤:
1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器
2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。
图二:已经复制进库模块的新建模型窗
3、从模块库复制所需模块到新建模型窗,分别在模块子库中
找到所需模块,然后拖进空白模型窗中,如图二。
4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。
5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。
如图三所示:
图三:已构建完成的新模型窗
6、根据理论数学模型设置模块参数:
①设置增益模块<Gain>参数,双击模型窗重的增益模块<Gain>,引出如图四所示的参数设置窗,把<Gain>增益栏中默认数字改为2,单击[OK]键,完成设置;
图四:参数已经修改为2的<Gain>增益模块设置窗
②参照以上方法把<Gain1>增益模块的增益系数改为100;
③修改求和模块输入口的代数符号,双击求和模块,引出如图五所示的参数设置窗,把符号栏中的默认符号(++)修改成所需的代数符号(--),单击[OK]键,完成设置;
图五:改变输入口符号的求和模块参数设置窗
④对积分模块<Integrator1>的初始状态进行设置:双击积分模块<Integrator1>,引出如图六所示的参数设置窗,把初始条件
Initial condition栏中的默认0初始修改为题目给定的0.05,单击[OK]键,完成设置。
图六:实现初始位移0.05设置的<Integrator1>设置窗7、仿真运行参数采用默认解算器“ode45”、默认“变步长”和默认仿真终止时间10
8、把新建模型保存为exm070101.mdl
9、试运行,以便发现问题加以改善
①双击<Scope>示波器模块,引出示波器显示窗,并使它不与exm070101模型窗重叠。
②单击exm070101模型窗上的仿真启动键,使该模型运行,在示波器上呈现的运行结果可能如图七所示。
图七:坐标范围设置不当时的信号显示
③单击Scope显示窗上的纵坐标范围自动设置图标,示波器显示窗改变为如图八所示。
在显示窗中,可以看到位移x(t)的变化曲线,同时可以发现:纵坐标的适当范围大致在[-0.06,0.06];仿真时间取[0,5]即可,显示曲线不够光滑。
图八:采用轴自动设置功能后的信号显示
10、据试运行结果,进行仿真参数的再设置
①示波器纵坐标设置:用鼠标点击示波器的黑色显示屏,在弹
出菜单中选择Axes Properties,引出纵坐标设置对话窗(如图九),把纵坐标的下限、上限分别设置为-0.06和0.06,点击[OK]键,完成设置;
图九:对显示屏的纵坐标范围进行设置
②示波器时间显示范围的修改:单击示波器的参数设置图标,引出示波器参数设置窗(如图十);在General卡片的Axes区的Time range栏中填写5或auto,点击[OK]键,完成设置;
图十:对示波器时间显示范围的设置
③显示曲线的光滑化设置:选中exm070101模型窗的下拉菜单项Simulation\Configuration Parameters,引出仿真参数配置窗(如图十一);再在该窗左侧的选择栏中,选中Data Import/Export 项,与之相应的参数设置栏便出现在窗口的右侧;把右半窗下方Save options区中Refine factor栏中的默认值改为5,点击[OK]键,完成设置;
图十一:通过仿真参数配置窗设置输出曲线光滑因子
④完成以上修改后的模型窗(如图十二),再次运行exm070101,可得比较满意的位移变化曲线,如图十三。
图十二:仿真参数调整运行后的exm070101模型
图十三:适当地显示仿真所得的位移变化曲线
三、实验小结
在本次实验中,根据物理定理建立微分方程,并以此微分方程
创建SIMULINK模型的完整步骤:微分方程的整理,模块的复制,信号线的构画,模块参数设置,示波器的调整,仿真参数的设置。
通过这次实验,让我知道了连续时间系统的建模与仿真,在实验中,要根据理论数学模型,从系统角度出发,对各模块的非结构参数进行设置,还要根据经验或采用默认方法,对仿真解算器和仿真终止时间进行设置。