kp
K
位置误差
ess
R 1 kp
R
1 K
I
0
II
0
III
0
7
第七页,共28页。
3. 输入作用下稳态误差计算…
(2)斜坡作用下的稳态误差
R
r(t)R,tR(s)s 非过主阻导 尼极点>1:响除应主直导接极收点敛外,的系其统他有闭两环个极不点等2的负实根
速度误差不是速度上存在稳态误差 误差与稳态误差的定义
)
1
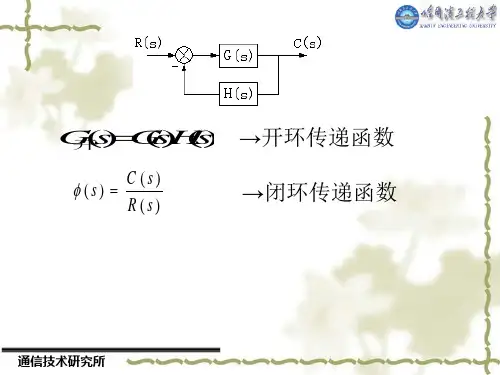
R Lims R 输入作用下稳态误差计算…
s0
第二十三页,共28页。 LimsG(s)H(s) K Lims 临界稳定:若系统的响应随时间的推移而趋于常值或等幅正弦振荡
开环系统的静态误差s系0数Kp,Kv,Ka;
s0
输入作用下稳态误差计算…
kvL s 0ism G (s)H(s), essk R v
(1)阶跃作用下的稳态误差
r(t)R1(t),R(s)R s
ess
Lim sR(s) s0 1G(s)H(s)
Lims1R(s)
s0
K Lims
s0
1
R LimG(s)H(s)
Lims R
s0
K Lims
s0
s0
kpL s 0iG m (s)H (s), ess1 R kp
系统 型别
0
静态位置 误差系数
18
第十八页,共28页。
19
第十九页,共28页。
主导极点: 如果在所有的闭环极点中,距虚轴
最近的极点周围没有闭环零点,而其他闭环极点 又远离虚轴,那么距虚轴最近的极点在系统响应 过程中起主导作用,这样的闭环极点称为主导极 点 非主导极点:除主导极点外的其他闭环极点