工程车辆自适应模糊换挡决策方法_张勇
- 格式:pdf
- 大小:189.01 KB
- 文档页数:5

基于模糊自适应PID的汽车驾驶机器人的车速控制陈刚;张为公【摘要】In view of the problems of large speed fluctuations and the tuning difficulty of regulator parameters when conventional PID control is used in robot driver, a new speed control method for vehicle robot driver based on adaptive fuzzy PID control is proposed in this paper. Specifically, the model for the coordinated control of multiple manipulators in vehicle robot driver is established first. Then based on this, an adaptive fuzzy PID speed controller for vehicle robot driver is designed to realize the speed tracking of given driving cycle. The results of test indicate that compared with conventional PID control, the proposed method can greatly improve the accuracy of speed tracking with a tracking error within the range of±2km/h, meeting the requirements of national vehicle test standards and ensuring the accuracy and validity of vehicle test data.%针对汽车驾驶机器人采用常规PID控制时车速波动大、调节器参数调整困难等问题,提出了一种基于模糊自适应PID的汽车驾驶机器人车速控制方法.首先建立了汽车驾驶机器人多机械手协调控制模型,然后在此基础上设计了一种驾驶机器人模糊自适应PID车速控制器,实现了驾驶机器人对给定循环行驶工况的车速跟踪.试验结果表明,与常规PID控制方法相比,采用所提出的方法车速跟踪精度明显改善,车速跟踪误差在±2km/h范围内,满足国家汽车试验标准的要求,保证汽车试验数据准确有效.【期刊名称】《汽车工程》【年(卷),期】2012(034)006【总页数】6页(P511-516)【关键词】汽车试验;驾驶机器人;车速控制;自适应模糊PID控制【作者】陈刚;张为公【作者单位】南京理工大学机械工程学院,南京210094;东南大学仪器科学与工程学院,南京210096【正文语种】中文前言驾驶机器人是在汽车试验中代替人类驾驶员进行驾驶操作的工业机器人。

汽车AMT自动离合器的改进模糊滑模控制
赵永胜;张云清;任卫群;陈立平
【期刊名称】《汽车工程》
【年(卷),期】2006(028)008
【摘要】提出改进的模糊滑模控制器(MFSMC)实现离合器的自动控制.MFSMC采用饱和函数和模糊自适应系统来缓解抖振现象并提高其鲁棒性;采用局部线性化技术减少MFSMC的模糊规则数满足自动离合器的实时性要求.模拟结果显示所提出的控制器具有快速跟踪预定轨迹、对参数时变和外部扰动具有鲁棒性等特点.【总页数】5页(P750-754)
【作者】赵永胜;张云清;任卫群;陈立平
【作者单位】华中科技大学机械科学与工程学院,武汉,430074;华中科技大学机械科学与工程学院,武汉,430074;华中科技大学机械科学与工程学院,武汉,430074;华中科技大学机械科学与工程学院,武汉,430074
【正文语种】中文
【中图分类】U4
【相关文献】
1.AMT汽车自动离合器系统鲁棒故障检测 [J], 臧怀泉;徐奎;戴彦;赵保军
2.汽车AMT自动离合器的局部线性化模糊滑模控制 [J], 赵永胜;任卫群;张云清;陈立平
3.纯电动汽车无离合器式AMT换档控制研究 [J], 汪斌
4.电动汽车用无离合器AMT的换挡控制策略优化 [J], 李景蒲
5.电动汽车用无离合器AMT的换挡控制策略优化 [J], 李景蒲
因版权原因,仅展示原文概要,查看原文内容请购买。

第42卷第4期兵工学报Vol.42No.4 2021年4月ACTA ARMAMENTARII Apr.2021基于遗传算法优化和模糊控制动态优化的自动变速器换挡规律设计高子茵,杜明刚,李慎龙,李晋(中国北方车辆研究所车辆传动重点实验室,北京100072)摘要:为提高轻型越野战术车辆的整车动力性,针对车辆的自动变速器换挡规律进行优化设计。
依据MATLAB/Simulink的仿真环境,构建基于车速和油门开度双参数换挡规律的整车动力模型。
以双参数换挡规律的换挡点为优化对象,采用遗传算法对换挡点进行优化。
根据加速度参数能反映车辆纵向动态的特性,引入加速度,采用模糊控制算法对换挡规律进行动态优化设计,构建三参数的模糊控制器。
通过仿真模型和实车试验来验证换挡规律优化前后对车辆动力性的影响。
结果表明:优化后的控制策略可有效提升车辆的动力性能,能够更加合理分配在动力需求下的发动机和挡位的使用工况,完全满足轻型越野战术车辆复杂路况下对动力性的需求。
关键词:轻型越野战术车辆;自动变速器;换挡规律;遗传算法优化;模糊控制优化中图分类号:TJ810.3+21文献标志码:A文章编号:1000-1093(2021)04-0684-13DOI:10.3969/j.issn.1000-1093.2021.04.002Design of Shifting Rules of Automatic Transmission Based on GeneticAlgorithm Optimization and Fuzzy Control Dynamic OptimizationGAO Ziyin,DU Minggang,LI Shenlong,LI Jin(Science and Technology on Vehicle Transmission Laboratory,China North Vehicle Research Institute,Beijing100072,China)Abstract:The design of shifting rules of vehicle automatic transmission is optimized to improve the overall dynamics of light military wheeled vehicles.According to the simulation environment of MATLAB/ Simulink,a vehicle dynamic model based on the two-parameter shifting rule of vehicle speed and throttle opening is constructed.Taking the shift point of the two-parameter shifting rule as the optimization object, the genetic algorithm is used to optimize the shift point.According to the characteristics of that the acceleration parameters can reflect the longitudinal dynamics of vehicle,the acceleration is introduced,and the fuzzy control algorithm is used to dynamically optimize the design of shifting rule,and a three-parameter fuzzy controller is constructed.The simulation model and real vehicle test were used to verify the influence of the shifting rule on vehicle dynamics before and after optimization.The results show that the optimized control strategy can effectively improve the vehicle's dynamic performance,more reasonably allocate the operating conditions of the engine and gear under the power demand,and effectively meet the power demand of military wheeled vehicles under complex road conditions.收稿日期:2020-05-02基金项目:武器装备预先研究项目(2016年)作者简介:高子茵(1993—),女,助理工程师。

第5期2021年5月机械设计与制造Machinery Design & Manufacture 59工程车辆三参数自动换挡策略及试验研究于燕玲】,宗望远2(1.湖北工业职业技术学院汽车工程系,湖北十堰442000; 2.华中农业大学工学院,湖北武汉430070)摘要:为了提高工程车辆的动态性能,保证及时准确地完成自动换挡,提出了三参数的最优换挡理论。
采用改进BP 网络控制算法控制变速系统的自动换挡,通过仿真表明:节能和动态换挡规律可以明显提高工程车辆传动系统的效率。
在功率和经济性方面,三参数优于两参数转换规律。
通过对比试验发现当使用三参数综合换挡规则时,车辆的动态和经济性介于节能和动态换挡规律之间。
验证了所开发的改进的BP 神经网络控制的的可靠性。
关键词:三参数换挡;动态特性;智能控制;换挡试验中图分类号:TH16;U415.52+1 文献标识码:A 文章编号:1001-3997(2021)05-0059-04Three Parameter Automatic Shift Strategy and Test Study for Engineering VehiclesYU Yan-ling 1, ZONG Wang-yuan 2(1.Hubei Industrial Polytechnic Department of Automobile Engineering , Hubei Shiyan 442000, China ;2.Huazhong Agricultural University College of Engineering , Hubei Wuhan 430070, China )Abstract : In order to improve the dynamic per/ormanee of engineering vehicles and ensure the timely and aeeurate automatic shft, a three-parameter optimal shift theory is proposed. The improved BP network control algorithm is used to control theautomatic shift f the transmission system. The simulation shows that the efficiency f the transmission system f engineeringvehicles can be greatly improved by energy saving and dynamic shift laws. In terms f power and economy , the three parameters are superior to the two parameter conversion laws. It is found that the dynamic and economy of vehicle is between energy saving and dynamic shift law when using three-parameter comprehensive shift rule. The reliability of the improved BPneural network control is verified.Key Words :Three Parameter Shift ; Dynamic Characteristics ; Intelligent Control ; Shift Test1引言依靠液力传动系统的工程车辆,由于特殊的传动结构和恶劣的作业场所,现行的换挡方式能使发动机保持在高燃油经济性区域,但是目前广泛采用的经济换挡策略并不适用于工程车辆等液压机械传动车辆,会导致换挡误差大、动力经济性差。

《AMT车辆起步模糊控制及其执行机构特性研究》篇一一、引言随着汽车工业的快速发展,自动机械式变速器(AMT)因其高效率、低成本和良好的适应性,在汽车行业中得到了广泛应用。
然而,AMT车辆在起步过程中,由于控制策略的复杂性以及执行机构的特性差异,往往会出现起步模糊、换挡不平稳等问题。
因此,对AMT车辆起步模糊控制及其执行机构特性的研究显得尤为重要。
本文旨在探讨AMT车辆起步模糊控制策略,并对其执行机构的特性进行深入研究。
二、AMT车辆起步模糊控制策略1. 模糊控制的原理与特点模糊控制是一种基于模糊逻辑的控制方法,具有较好的适应性和鲁棒性。
在AMT车辆起步过程中,由于各种因素的影响,如道路条件、负载变化等,使得起步过程变得复杂。
模糊控制通过将控制过程中的不确定性转化为模糊逻辑语言,实现对复杂系统的有效控制。
2. AMT车辆起步模糊控制策略AMT车辆起步模糊控制策略主要包括模糊化、知识库、推理机和解模糊化四个部分。
其中,模糊化是将输入的精确量转化为模糊量;知识库包括数据库和规则库,用于存储模糊控制所需的数据和规则;推理机根据知识库中的规则进行推理,得出控制决策;解模糊化将推理结果转化为精确的控制量,实现对AMT车辆的精确控制。
三、AMT车辆执行机构特性研究1. 执行机构的类型与工作原理AMT车辆的执行机构主要包括离合器执行机构和选换挡执行机构。
离合器执行机构负责控制离合器的分离与结合,选换挡执行机构负责实现齿轮的选换。
这些执行机构通常采用液压、电动或气动等方式进行驱动。
2. 执行机构的特性分析执行机构的特性主要包括响应速度、精度、稳定性等。
在AMT车辆起步过程中,执行机构的特性对起步的平稳性和换挡的准确性有着重要影响。
因此,对执行机构的特性进行深入研究,有助于提高AMT车辆的起步性能和换挡性能。
四、实验与分析为了验证AMT车辆起步模糊控制策略的有效性以及执行机构的特性,我们进行了相关实验。
实验结果表明,采用模糊控制策略的AMT车辆在起步过程中,能够更好地适应道路条件和负载变化,提高了起步的平稳性和换挡的准确性。
AMT换挡电机调速系统模糊PID控制张宽;吴训成【摘要】针对传统的控制技术难以满足换挡电机调速系统快速性和稳定性的要求,引入模糊比例、积分和微分(PID)参数自适应控制器到换挡电机的控制系统中,根据系统输入误差和误差变化率在线整定PID参数,丰富了PID控制器的功能.仿真结果说明,模糊PID控制器与传统PID控制器相比,在动态响应上更快,在超调上更小.【期刊名称】《上海工程技术大学学报》【年(卷),期】2013(027)001【总页数】5页(P24-28)【关键词】机械式自动变速器;换挡电机;模糊PID控制【作者】张宽;吴训成【作者单位】上海工程技术大学汽车工程学院,上海201620【正文语种】中文【中图分类】TP273+.2机械式自动变速器(Automated Mechanical Transmission,AMT)是在传统干式离合器和手动变速器的基础上,采用微电子控制技术,通过电动、液动或气动执行机构,对油门、离合器和换挡机构进行协调控制,实现自动换挡的有级式机械自动变速器.随着汽车电子化技术的飞速发展,电动AMT 成为自动变速器的又一开发热点.电动AMT 保留了原手动变速器的换挡机构,通过电机控制选换挡杆来实现自动换挡功能.与液动AMT比较,电动AMT 具有结构简单、控制灵活、能耗小、成本低等诸多优点.换挡电机调速系统的控制是电动AMT 开发的重难点之一,传统的PID 控制不能有效地对调速系统进行实时在线调整,控制效果不好.而模糊PID 控制能够在线实时整定参数,不管被控对象参数有何变化,控制器皆能适应.1 电动AMT的换挡原理电动AMT 通过选挡、换挡电机脉宽调制转速控制来实现挡位的切换.选挡、换挡控制严格按照时序要求,只有在选挡结束后才可以进行换挡,只有在换挡位置处于空挡时才能进行选挡.要想快速平稳地完成换挡动作,AMT的换挡控制需联合发动机控制和离合器控制来进行协调.运用选挡电机驱动选换挡杆上下直线运动来实现选挡功能,运用换挡电机驱动选换挡杆转动,带动拨叉移动来实现换挡功能.本研究的换挡执行机构中电机选择额定电压为12V的无刷直流电机,其中换挡电机额定功率为100 W,选挡电机额定功率为50 W.选换挡电机各经由一个速比为50的减速机构减速增矩后连接到换挡操纵机构上,以获得适当的速度,满足所需要的选换挡力.2 AMT换挡电机数学模型根据一般电机原理,假设三相绕组完全对称,电感不随位置改变,反电动势为理想梯形波.以三相电流为状态变量,可以得到三相绕组电压平衡方程,即式中:Ua、Ub、Uc为定子各相绕组电压;Ia、Ib、Ic为定子各相绕组电流;Ea、Eb、Ec为定子各相绕组电动势;R为电机相电阻;L为每相绕组的自感;M为每两相绕组间的互感;p为微分算子,p=d/dt.如果三相绕组为星形连接,并且无中线,则有:Ia+Ib+Ic=0,且MIa+MIb+MIc=0.故有:从能量传递角度分析其功率和转矩,换挡电机的定子绕组输入功率与产生的电磁转矩关系为:换挡电机的电磁转矩为:换挡电机的运动方程为:通过对电机的数学模型转换和拉普拉斯变换,可得出换挡电机的传递函数为:式中:ω为电机的机械角速度;Tl为负载转矩;B为黏滞摩擦因数;J为电机转动惯量;Ud为直流母线电压;Ra为绕组线电阻;La为绕组等效线电感;ke为线反电势系数;KT为电机转矩系数.3 模糊PID控制器的设计3.1 模糊PID控制器结构在PID 控制算法基础上,模糊PID 控制器以输入误差e和误差变化率ec 作为输入变量,通过模糊推理实时在线调整PID 参数KP、KI、KD来达到不同时刻e和ec的参数自整定要求,其结构如图1所示.图1 模糊PID控制结构Fig.1 Fuzzy-PID control structure当换挡电机作为被控对象,采用增量式PID控制算法进行控制.增量式PID 控制算法可用差分方程表示为:其中:KI=KPT/TI;KD=KPTD/T;e(k)=yr(k)-y(k);Δe(k)=e (k)-e(k-1);Δ2e(k)=Δe(k)-Δe(k-1)=e(k)-2e(k-1)+e(k-2)式中:KP为比例系数;KI为积分系数;KD为微分系数;T为采样周期;TI为积分时间常数;TD为微分时间常数;e(k)为第k 次采样时刻的偏差值;yr(k)为第k次时刻设定的期望值;y(k)为第k 次时刻被控对象的实际输出值.3.2 隶属函数的确定输入量和输出量e、ec、KP、KI、KD的模糊子集为{FD,FZ,FX,ZO,ZX,ZZ,ZD},子集中元素分别表示负大、负中、负小、零、正小、正中、正大.这里的输出量ΔKP、ΔKI、ΔKD分别是KP、KI、KD的变化量.e和ec在模糊集上的论域为{-3,-2,-1,0,1,2,3};ΔKP、ΔKI和ΔKD的论域为{-3,-2,-1,0,1,2,3}.为了增强模糊控制器的鲁棒性,变量e、ec、ΔKP、ΔKI和ΔKD的隶属函数采用高斯型函数,并对各变量采取均匀划分,由此可得各模糊子集的隶属函数,即式中:e1=-3,e2=-2,e3=-1,e4=0,e5=1,e6=2,e7=3.3.3 建立模糊控制规则表在换挡电机的调速系统中,根据各模糊子集的隶属函数,运用模糊合成推理设计PID 模糊输出参数,查出修正参数值代入式(9)计算:式中,K′P、K′I、K′D分别为PID 各参数的初值.因为模糊控制器的灵活性使得PID 参数的整定对各初值的精度要求较低,所以可由常规PID 对系统进行控制,不要求完全达到系统各性能指标,只要保证系统稳定性,方可把这组参数值作为PID参数初值,再通过模糊推理得出的校正值对PID 参数进行微调,以达到系统对快速性和稳定性的要求.建立模糊控制规则见表1.模糊控制器的输出量需要通过精确模糊化推理,才可以去控制被控对象.在模糊推理和非模糊化过程中,本研究采用Min-Max重心法(加权平均法).模糊集合的“重心”可通过式(10)计算得出,即表1 ΔKP,ΔKI,ΔKD模糊规则表Tab le 1 Fuzzy rule table ofΔKP,ΔKI,ΔKD式中:zi为各输出模糊子集对应模糊单点集的值;uc(zi)为输出子集对应的隶属度;n为输出模糊子集数.3.4 建立模糊控制模型应用Matlab 建立模糊控制器模型如图2所示.图2 PID参数模糊控制器模型Fig.2 Fuzzy controller model of PID parameters 根据设计的模糊控制器,利用输入误差e和误差变化率ec 可得到PID 控制参数KP、KI、KD,如图3所示.图3 模糊控制输出图Fig.3 Output figures of fuzzy control4 仿真试验分析根据换挡电机调速系统的控制模型,用Matlab/Simulink进行仿真试验,系统仿真结构框图如图4所示.系统仿真参数:电阻R=1Ω,自感L=0.02 H,互感M =-0.006 7 H,转动惯量J=0.005 kg·m2,额定转速n=50r/s,极对数P=2,直流电源电压U=12V,转矩T=3N·m.图4 系统仿真框图Fig.4 Block diagram of system simulation仿真试验得出模糊PID 控制方法与常规PID控制方法的系统响应曲线效果比较如图5所示.在传统PID 控制模块中,需要对PID 控制参数KP、KI、KD进行初值设定,初值设定主要参照已有的工程经验,而初值设定直接影响到系统的快速性和稳定性.在模糊PID 控制模块中,可以随意设定PID 参数初值,通过仿真程序自行整定PID 参数值,因此很容易满足系统的需求.对于要求具备稳定性高、超调量小和系统响应快的换挡电机调速系统,在阶跃响应下,其与传统PID 控制器对比,在参数调整上模糊PID 自适应控制器更快,表现出的鲁棒性较强.由图5可见,其稳态响应过程比传统的PID 控制器也要快,并且上升时间和调整时间明显缩短,系统的动态性能在很大程度上得到提高.两者相比较得出:模糊PID自适应控制器具有响应快、超调量小和稳态精度高的优点,响应曲线具有很好的跟随性,满足了换挡电机调速系统对快速性、稳定性和动态性能的要求.图5 系统响应图Fig.5 System response diagram5 结语基于换挡电机的数学模型,把模糊智能控制理论运用到换挡电机调速系统,创建了Simulink环境下的调速系统控制仿真模型.结果表明:在模糊PID 控制下,系统输出超调减小,响应加快,系统获得了很好的动态性能、快速性能和稳态性能;另外在整个换挡过程中,不仅只有换挡控制,还需要对发动机和离合器进行联合协调控制.因此制定了一个较好的控制方法,实现了整个系统最优控制,这对AMT的开发具有重要的意义.参考文献:[1]刘绍鼎,樊立萍,姜长洪.基于模糊规则参数自整定PID 控制器的设计[J].微计算机信息,2007,23(10):50-51,119.[2]张静,马俊丽,岳境.Matlab 在控制系统中的应用[M].北京:电子工业出版社,2007.[3]纪志成,沈艳霞,姜建国.基于Matlab无刷直流电机系统仿真建模的新方法[J].系统仿真学报,2003,15(12):1745-1749,1758.[4]石辛民,郝整清.模糊控制及其MATLAB 仿真[M].北京:清华大学出版社,2008.[5]魏黎.基于无刷直流电机的AMT 选换挡控制系统研究[D].长春:吉林大学,2007.[6]刘志友,侯国强,高晓星.模糊PID 控制器在伺服系统中的应用[J].微计算机信息,2008,24(8):193-194.[7]Yu W B,Zhao D X,Chen N.Study on fuzzy gearshift tactics in automotive gearshift control system of technical vehicles[C]∥Proceedings of 30th Annual Conference of IEEE Industrial Electronics Society.Busan:IEEE,2004:425-442.。
专利名称:一种车辆变速箱自动换档机构专利类型:实用新型专利
发明人:陈宏伟,宋健,张勇
申请号:CN01226807.0
申请日:20010608
公开号:CN2480213Y
公开日:
20020306
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种车辆变速箱自动换档机构,电动机通过减速器与凸轮轴相联,凸轮盘通过键连接轴向固定在凸轮轴上,凸轮盘的端面和凸轮轴轴肩的端面分别设有凸轮槽。
拨叉的一端通过圆柱销插在前述两个凸轮槽内,拨叉的另一端插入汽车变速箱内换档拨块的凹槽内。
角位移传感器置于凸轮轴的端部。
本实用新型设计的换档机构,适用于任何采用固定轴式有级齿轮手动换档变速箱的车辆,易于布置和实施,结构紧凑,成本低廉。
申请人:清华大学
地址:100084 北京市海淀区清华园
国籍:CN
代理机构:北京清亦华专利事务所
代理人:罗文群
更多信息请下载全文后查看。
对工程车辆自动变速系统的模糊控制方法探讨摘要:自动变速是人们长期以来努力追求的目标,是当今世界研究与推广的重要技术。
自动变速尤其在车辆的性能评定中占据很大的一份比例,自动变速技术充分发挥了车辆的动力性、经济性和驾驶性,它能大幅度提高工作效率,减轻工人的作业强度。
随着电子技术和控制技术的发展,自动变速技术在越来越多的车辆上得到广泛应用,其种类也有了越爱越多的不同。
本文旨在探讨模糊控制在自动变速系统中应用。
关键词:模糊控制;自动变速;工程车辆;遗传算法正文:1.背景汽车自动变速器技术的不断发展促进了其在工程车辆中的开发和应用。
由于施工车辆的工作条件和使用目的与普通车辆不同,工作条件和工作条件复杂多变,驾驶员需要频繁换档,以满足整机的动态要求,同时,必须操纵和操作操作装置。
强度大,驾驶员极易疲劳,车辆经济性难以保证。
实现工程车辆的自动换挡对于提高车辆性能,提高工作效率,降低驾驶员的劳动强度具有重要意义。
从1945年开始,美国通用汽车公司成功将其自动变速器技术应用于卡车,从而促进了其在工程车辆中的应用。
在20世纪80年代,自动变速器技术被用于建筑车辆,如装载机,平地机,卡车和自卸卡车。
直到20世纪90年代才开始在中国推广和开发中国工程车辆自动变速技术。
但是,核心技术还不成熟。
长期以来,中国主要在能源,交通,水利等重大项目中使用进口工程车辆。
随着经济全球化进程的加快,为了提高中国工程车辆的竞争力,有必要加强自主研发能力的培养,快速发展自己的自动变速器技术。
2.模糊控制与遗传算法(1)对于传统的控制方法,必须使用计算机来控制。
首先,应设置控制目标值。
根据受控对象的特征变换和环境变换,采用负反馈原理连续调整以跟踪设定的目标值。
为了设计满足目标的控制器,必须建立控制系统的数学模型,即,从输入到输出的映射关系或某个功能关系,以实现受控对象的物理系统的数学抽象。
事实上,受控对象可以描述其传统数学中的内在特征及其变化规律。
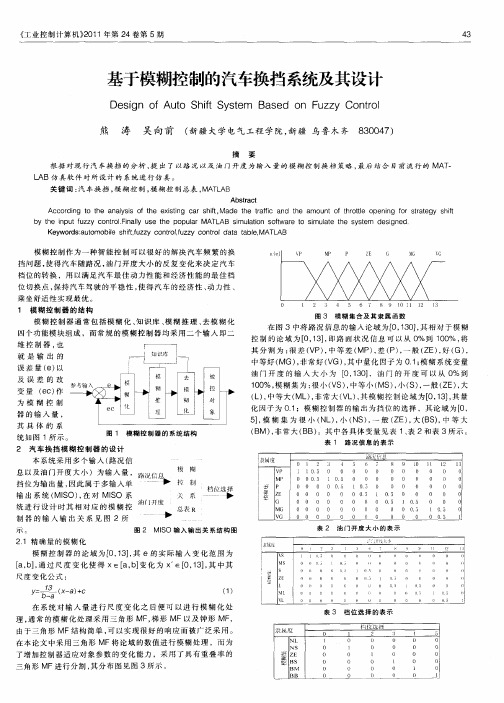
收稿日期:2001-12-25基金项目:国家自然科学基金资助项目(50075033)作者简介:张 勇(1973-),男,山东淄博人,助理研究员,博士后.工程车辆自适应模糊换挡决策方法张 勇1,刘 杰2,卢新田2,宋 健1(1.清华大学汽车安全与节能国家重点实验室,北京 100084;2.同济大学汽车学院,上海 200092)摘要:针对工程车辆在作业过程中作业质量与作业阻力的变化,在模糊控制自动换挡系统的基础上,采用修正模糊量化因子的方法,建立了工程车辆的模糊自适应换挡系统,使自动换挡系统具有了自动适应工作条件和工作环境的变化能力,提高了作业效率.仿真研究表明了自适应模糊换挡系统的可行性和有效性.关键词:自适应模糊控制;自动换挡系统;换挡决策方法中图分类号:T H 24 文献标识码:A 文章编号:0253-374X (2003)01-0104-05Adaptive Fuzzy Shift Strategy of Construction VehiclesZHANG Yong 1,LIU J ie 2,LU X in -tian 2,SONG Jian 1(1.S tate Key Laboratory of En ergy and S afety ,Tsinghua Un iversity ,Beijing 100084,China ;2.College of Automotive ,Tongji Univers ity ,S hanghai 200092,Chin a )Abstract :The w orking resistance and the vehicular mass of engineering vehicles variey under w orking condi -tion .The traditional fuzzy control used in the shift strategy of vehicle is no t suitable for the shift point control under the wo rking condition .After researching into the fuzzy shift strategy and the course of shift ,the m ain principle of fuzzy shift and the shift strategy is determined .Then the fuzzy adaptive shift sy stem is realized byadjusting the fuzzy normalized factor .The simulation under the wo rking condition of the bulldozer is carried out .The simulation results indicate that the fuzzy adaptive shift strategy is effective and practicable .Key words :adaptive fuzzy control ;autoshift system ;shift strategy 挡位决策问题是自动变速技术的主要问题之一,即根据驾驶员意图、车辆的运行状态和道路状况等因素,按照车辆某些性能参数最优的原则,确定车辆的最佳挡位.目前,挡位决策方法可以分为两大类,一类是在选定换挡控制参数之后,按照某些性能指标最优的方法求解换挡规律[1,2];另一类方法则是利用驾驶员的驾驶经验及相关专家的知识形成模糊控制规则,即基于专家系统的换挡规律[3,4].前者为传统方法,理论完善,有一套完整的求解方法,在车辆运行环境和车辆工况与求解最优换挡规律时的设定一致时,其给出的挡位可以保证车辆的最优性能,然而当车辆的实际运行条件与换挡规律求解的设定条件有较大差别时,其给出的挡位显然不是最优的,或在某些区域内不是最佳的.由于在模糊控制系统设计时,隐含了“车辆性能在受控过程中不会出现超出操作者经验范围的显著变化”的假设,使模糊控制器的应用仅限于操作者的经验所及的工况,采用固定的模糊量化方法.因而后一方法并不具有自动适应行驶环境和使用条件变化的能力.对于工程车辆而言,车辆在使用过程中,作业质量和作业阻力存在较大的变化.因而,将自适应控制引入模糊控制进行挡位决策,可以在保持模糊控制优点的基础上,使换挡决策具有对环境与车况的自适应能力,能够根据使用条件和使用环境的变化调整换挡点的确定方法,从而使自动变速系统具有智能化特征.第31卷第1期2003年1月同 济 大 学 学 报JOURNAL OF T ONGJI UN IVERSIT Y Vol .31No .1 Jan .20031 换挡系统控制参数工程车辆自动变速系统与绝大多数的工程系统一样,可利用的信息来源有两种:一是提供测量数据的传感器,二是提供系统性能描述的专家.传统的自动变速系统的决策依据为传感器测取的车辆状态参数,模糊控制系统的主要决策依据为专家对车辆自动变速系统的语言描述.充分利用系统已经测取的车辆状态参数和驾驶员的操纵量,对驾驶员的操纵意图和车辆的使用状况、使用环境进行识别,可以最大限度地增加系统的可用信息,使自动变速系统具有自适应能力,能够适应车辆使用条件和使用环境的变化.进行工程车辆的挡位决策需要自动变速系统依据检测到的参数进行工程车辆的行驶阻力(包括作用阻力)和作业质量的估计.(1)油门开度.发动机油门开度是自动变速系统的主要控制参数之一,驾驶员可以通过调节油门来干预换挡.(2)发动机转速.发动机转速是发动机运行状况的主要参数之一,可以用来估计发动机的输出转矩.在液力传动车辆中,其大小等于变矩器泵轮转速,是判断变矩器的工作状态的参数之一,也被用于变矩器泵轮转矩的估计.(3)变矩器涡轮转速.变矩器涡轮转速是判断变矩器的工作状态的参数之一,也被用于变矩器泵轮转矩的估计,其大小等于变速箱的输入转速.(4)车速.车辆运动速度是判断自动变速系统的主要参数之一,由车速的差分可以得到车辆的运动加速度.(5)发动机输出转矩.发动机输出转矩是发动机控制和传动系控制的重要参数,用于车辆驱动转矩的估计,用以识别车辆的使用质量和车辆运动阻力,在线测量比较困难,可利用发动机特性,通过油门开度和发动机转速查表间接得到.(6)变矩器输出转矩.与发动机输出转矩一样,变矩器输出转矩可用于车辆驱动转矩的估计,用以识别车辆的使用质量和车辆运动阻力.利用变矩器模型,变矩器输出转矩可以通过变矩器泵轮、涡轮转速间接得到.2 模糊换挡控制系统工程车辆在行驶和作业过程中,最能反映驾驶员意图而又能为驾驶员熟练掌握的是油门开度,最能反映车辆运行状况和环境条件的是车辆的速度和加速度,而升挡或降挡是实现驾驶员意图的有效途径.模糊换挡系统采用油门开度、车速和加速度为输入量,挡位为输出量.2.1 控制变量模糊化及量化因子模糊换挡系统采用多输入单输出结构,根据车辆的速度、加速度和油门开度的大小,按照一定的模糊控制规则和推理方法,进行挡位决策.车辆速度的模糊量分别取“小”(VS )、“中小”(FS )、“中”(M )、“中大”(FL )、“大”(V L )共五个.对于加速度,其模糊量取“负大”(N L )、“负小”(NS )、“零”(ZERO )、“正小”(PS )、“正大”(PL )共五个.对于油门开度,其模糊量分别取“小”(VS )、“中小”(FS )、“中”(M )、“中大”(FL )、“大”(VL )共五个.挡位E 是以单点表示,取值分别为Ⅰ,Ⅱ,Ⅲ挡.当论域中元素总数为模糊子集总数的2~3倍时,模糊子集对论域的覆盖程度较好[5].将车速、加速度、油门开度进行量化,它们的论域分别为:{0,1,2,3,4,5,6,7,8}、{-4,-3,-2,-1,0,1,2,3,4}、{0,1,2,3,4,5,6,7,8}.油门开度α的实际取值为[0,15];在不同的运行工况和使用条件下,车辆的速度v 、加速度d v /d t 的确切取值范围不同,在平直道路行驶条件下,推土机的车速、加速度的取值分别为[0,12];[-2,+2].对应的模糊论域可得量化因子分别为:油门开度量化因子k 1=8/15,车速量化因子k 2=2/3,加速度量化因子k 3=2.车速v 的各模糊子集的隶属度曲线如图1a 所示.同样可以确定车辆加速度a 和油门开度α的模糊子集的隶属度函数.加速度的隶属度曲线如图1b 所示,油门开度的隶属度曲线和车速的隶属度曲线相同.105 第1期张 勇,等:工程车辆自适应模糊换挡决策方法图1 车速和加速度的隶属度曲线Fig .1 Vehicle speed and acceleration m embership curves2.2 作业质量、作业阻力的模糊化推土机在非作业条件下行驶时,车辆的使用质量几乎不发生变化,而在推土机的作业过程中,推土机的作业质量变化范围很大,并且随作业介质的不同而不同.运动阻力的变化也相差很大,在平直道路上行驶时,运动阻力小,爬坡时运动阻力变大.作业过程中,由于作业阻力F 的变化,车辆的运动阻力的变化也相当大.并且由于使用质量估计算法中关于在短时间内车辆作业阻力与行驶道路阻力不变的假设,以及发动机/变矩器的模型误差和速度传感器的动态特性等不稳定因素的存在,车辆的使用质量m a 的辨识出现一些波动,在实际控制过程中,将带来系统不稳定因素.为了增加系统的稳定性,本文将作业质量划分为五个等级,其模糊量分别取“小”(VS )、“中小”(FS )、“中”(M )、“中大”(FL )、“大”(VL ).取其论域为:{0,1,2,3,4,5,6,7,8},其隶属度曲线如图2所示.同样,对估计得到的车辆运动阻力划分为五个等级,其模糊量分别取“小”(VS )、“中小”(FS )、“中”(M )、“中大”(FL )、“大”(VL ).取其论域为:{0,1,2,3,4,5,6,7,8},其隶属度曲线如图3所示.图2 作业质量隶属度曲线Fig .2 Vehicular mass mem bershipfunction图3 作业阻力隶属度曲线Fig .3 Working resistance membership function2.3 模糊换挡策略根据熟练驾驶员的操作经验,参照模糊换挡主要原则可以归纳出如下的模糊控制规则,应用M amdani 直接推理法,并采用重心法进行反模糊化,可以得到工程车辆的模糊换挡策略.推土机在平直路面上稳定行驶的模糊基本换挡策略如图4所示.图4a 为根据车速和油门开度的变化确定车辆挡位的换挡规律图,图4b 为挡位E 与车速v 及车速变化率的关系,图4c 为挡位与油门开度及车速变化率的关系.图4 模糊换挡策略Fig .4 Fuzzy shift strategy106 同 济 大 学 学 报第31卷 3 自适应模糊换挡系统3.1 自适应模糊换挡控制系统在实际应用过程中,由于车辆使用参数与使用环境的差异,驾驶员对车辆的输出性能评价不同.在控制过程中,改变量化因子可以改变模糊控制器的输入变量的隶属度,实现模糊决策的自适应调整.本文采用调整量化因子的方法,来实现车辆自动变速的自适应模糊控制.该方法采用自调整模糊控制器,对模糊控制输入量的量化因子按照车辆使用参数的变化和使用环境的变化自行调整,模拟驾驶员对车辆性能的评价,实现车辆自动变速的自适应模糊控制.图5为车辆自适应模糊控制系统原理图.由该图可以看出,自适应模糊换挡系统由两级组成,其中下一级的算法实现车辆模糊换挡的功能,为车辆基本模糊换挡系统,而上一级的算法实现模糊控制器参数的自调整,实现模糊换挡系统的自适应功能.3.2 车辆性能估计与量化因子根据车辆作业质量与作业阻力的大小,可以离线计算车辆性能的变化范围,计算出工程车辆的车速和加速度的变动范围,并按照工程车辆基本模糊换挡系统中规定的论域,求出相应的量化因子.根据求得的量化因子将该参数模糊化,并利用模糊推理技术,可以进行挡位决策.求得车速与加速度的量化因子模糊查询表,如表1,表2所示.按照表中模糊查询参数可以对车速与加速度的量化因子进行修正,进而修改车速与加速度的隶属度函数.表1 车速量化因子模糊查询表Tab .1 Fuzzy norm alized factor of vehicle speedm a F012345678088887765418887665442877655443377654443347654443325654433322654333322174333322118333322211表2 加速度量化因子模糊查询表Tab .2 Fuzzy normalized factor of vehicle accelerationm a F0123456780887766654188776654428776554443776644433476554433256544343226544443222744333222184333222113.3 自适应模糊换挡系统图6为车辆自适应模糊换挡系统图,该系统为一个具有两级递阶结构的参数自调整模糊控制器.其中下一级的算法实现车辆模糊换挡的功能,系统根据测量得到的油门开度、车速等参数,经过模糊化、模糊推理进行挡位决策,最终通过换挡执行机构实现挡位转换,实现车辆的换挡操作.系统通过车辆的参数测量,按照车辆质量及阻力的识别算法,进行模糊控制器参数的自调整,实现控制器的自适应功能.自适应模糊换挡系统是采用量化因子的自整定算法实现的,按照测得的车辆参数对车辆作业质量与作业阻力进行在图5 工程车辆自适应模糊控制系统原理图Fig .5 Flowchart of vehicular adaptive fuzzy controlsystem图6 工程车辆自适应模糊换挡系统图F ig .6 A daptiv e fuzzy control system o f co nstruction vehicle107 第1期张 勇,等:工程车辆自适应模糊换挡决策方法线辨识,并据此进行量化因子k 2,k 3的自整定,图6所示自适应模糊换挡系统中的参数自调整正是通过表1,表2中量化因子的模糊查询实现的.通过采用车速与车辆加速度量化因子的自适应调整,实现模糊换挡系统的自适应控制,使其具有对作业条件下车辆参数变化的自适应控制能力.4 仿真结果本文对推土机在作业工况下的响应进行了仿真研究.作业工况为铲土和运土的过程,对于这种工况的仿真过程是:首先设定车辆在三档行驶逐渐接近作业场地,由驾驶员操纵作业装置进行铲土作业过程,最后进入运土阶段.整个过程代表了推土机的典型工作工况.图7a 为模糊换挡系统的响应过程,图7b 为自适应模糊换挡系统的响应过程.可以看出采用车辆自适应模糊换挡系统时的作业过程中,缩短了车辆的低速作业时间,车辆的作业效率得到了提高.图7 作业工况下车辆性能仿真结果Fig .7 Simulation results of the vehicle under the working condition5 结语本文分析工程车辆自动变速系统的模糊换挡策略,建立了模糊控制自动换挡系统.并在此基础上,针对工程车辆在作业过程中作业质量与作业阻力的变化,采用修正模糊量化因子的方法,建立了工程车辆的模糊自适应换挡系统,使自动换挡系统具有了自动适应工作条件和工作环境的变化能力,提高了作业效率.仿真研究表明自适应模糊换挡系统的可行性和有效性.参考文献:[1] 张光裕,许纯新.工程机械底盘设计[M ].北京:机械工业出版社,1988.[2] 彼得罗夫B A .汽车传动系自动操纵的理论基础[M ].陆兆风译.北京:人民交通出版社,1963.[3] M as m oudi R A ,Hedrick J K .Estim ation of vehicl e shaft torque using nonlinear observers [J ].Journal of Dynamic S ystems ,M easurement andControl ,1992,9(114):394-400.[4] Hiroshi Yamaguchi .Automatic transmission shift schedul e control using fuzzy logic [A ].S AE Technical Papers Series [C ].[s .l .]:S AE ,1993.SAE 930674.[5] 王立新.自适应模糊系统与控制———设计与稳定性分析[M ].北京:国防工业出版社,1995.108 同 济 大 学 学 报第31卷 。