lensphoto近景摄影测量2.0操作手册
- 格式:pdf
- 大小:5.86 MB
- 文档页数:83

摄影测量实习报告浙江农林大学2015年1月1 实习目的通过本次实习,熟悉使用Lensphoto多基线数字近景摄影测量系统生产测绘产品的过程,掌握生产过程中各步骤的原理,加深对有关理论知识的理解。
(1)了解Lensphoto多基线数字近景摄影测量系统的功能;(2)掌握Lensphoto多基线数字近景摄影测量系统的作业流程;(3)加深对数字近景摄影测量基本理论、方法和过程的理解;2 Lensphoto系统简介Lensphoto多基线数字近景摄影测量系统属于地理信息系统领域最新的数字近景摄影测量应用软件。
它是基于摄影测量专家张祖勋院士最新提出的,以计算机视觉原理(多基线)代替人眼双目视觉(单基线)传统摄影测量原理,从空间一个点由两条光线交会的摄影测量基本法则变化为空间一个点由多条光线交会而成的全新概念,从而研发产生的一套全新的数字近景摄影测量系统。
3 实验过程3.1变形监测一、新建工程导入照片之后,填写总航带数,将照片添加到当前航带。
导入相机参数添加照片之后,点击“相机参数”按钮——“导入相机参数”,打开对应文件夹相机参数文件。
其中,空三匹配格网默认50,可适当调高,提高点云密度。
单击“保存工程”按钮,输入文件名,保存打开工程二、空三匹配空三匹配:添加航带内和航带间影像种子点;进行全自动空三匹配。
匹配前人工给定航带内和航带间立体像对的种子点,目的是确定匹配像对两张影像间的概略偏移量。
平行摄影:只有一个航带,只需给定航带内的种子点;打开空三匹配:双击左侧第一张影像,点击“添加种子点”按钮,分别在左右两张影像上选取同名点,添加种子点(即依次在两张照片相同位置用标记十字丝);添加完毕,点箭头向右,切换到下一相对添加种子点,如图示:种子点添加完成之后,点击按钮,进行全自动匹配进度条完成后,点击按钮,双击左侧影像可检查匹配点三、自由网平差此操作是为检测工程能否进行下去。
点开光束法平差,平差一次查看结果,以确定工程是否可以继续进行。
OFF-LINE LENS偏心检测机操作手册LENS TILT OFF-LINE INSPECTION S YSTEM发布日期:2014年3月一、 设备结构1. 整体结构2. PPS(or ODA), SMU(or Tester)单位(1) PPS (Programmable Power Supply) 将外部交流电转换成之流电 (AC DC)(2)SMU or Tester设备开关显示器手动扫描器紧急开关开始键PC 开关停止键键盘(包括鼠标球)PPS (or ODA)SMU (or Tester)3. 影像 (Vision)单位154234. 照明 (同心圆方式专用)单位5. 其它配套设施照明源(Light Source)照明模组PEAK 用摄像头 同心圆用摄像头PEAK 用 PIN-BLOCK6. 作业台7. 检测模式切换同心圆(or ROW )方式- 摄像头(Camera)单位:TV LENS 50mm - 照明单位 - 照明电源单位- 程序:LEDCT_BINLINE Row xxxx (参考名,实际版本可能略有不同) PEAK 方式Pin-block 左/右移动 Micro-stagePin-block 前/后 Micro-stage作业台-摄像头(Camera)单位:TV LENS 25mm-扩散板单位:-Pin-Block & Short-Block单位:-程序:LEDCT_ALINE Pola xxxx / LEDCT_ALINE 3PEAK (参考名,实际版本可能略有不同)二、 检测原理1. 同心圆方式( or ROW 方式)检测原理是- 使用 UV 照明激发 LED PKG 荧光粉 (左侧图像中中间亮圆为 LED PKG 荧光粉激发产生的光)- 使用白色照明照射 LENS ,此时产生折射影响(外围圆圈部分) - 以 LENS 的中心点位原点,求出 LED PKG 的坐标值并计算出 LENS 中心与 LED PKG中心之间的距离值此时产品是处于不点亮状态, 检测结果为绝对距离值(µm) 适用于部分 Lens 类型偏心检测公式:Lens Center(x,y) – LED Pkg Center(x ’,y ’) = (Delta_x, Delta_y ) → d (距离值)LENS Center (X, Y)LED PKG Center(X ’, Y ’)2.PEAK方式 (or POLA方式) ArrayPEAK方式检测原理为-点亮状态下,把透过扩散板的影像利用 Vision技术获得 Intensity-Profile后,将Profile 曲线的两端高峰点进行比较且获得偏心量的方式-以5°(可调整1°以上的任意数值)为单位扫描180°,获得36个 Profile,选取其中最大的值并将其视为偏心值此时检测结果为百分比(%),可转换为绝对距离值(µm)3.两种检测模式的特点比较三、操作顺序1.设备起动前确认内容1)确认各连接线状态:确认控制器、电源适配器、PC以及其它与本体连接的各种线(阳极线、数据线、通信线)是否连接正确。
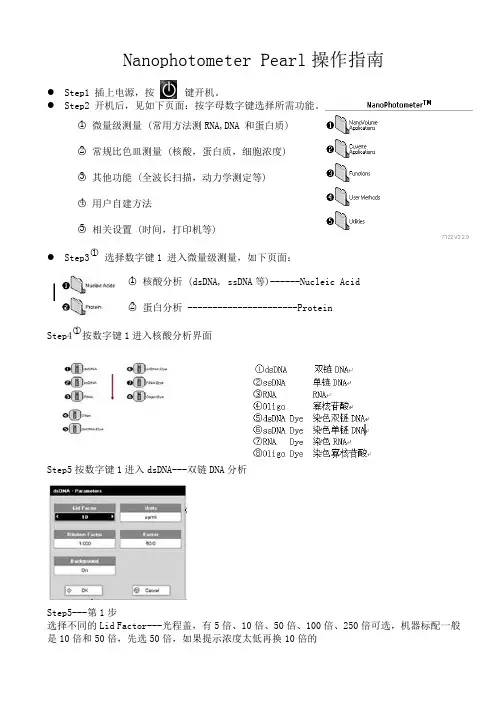
Nanophotometer Pearl 操作指南● Step1 插上电源,按 键开机。
● Step2 开机后,见如下页面:按字母数字键选择所需功能。
○1 微量级测量 (常用方法测RNA,DNA 和蛋白质) ○2 常规比色皿测量 (核酸,蛋白质,细胞浓度) ○3 其他功能 (全波长扫描,动力学测定等) ○4 用户自建方法 ○5 相关设置 (时间,打印机等) ● Step3○1 选择数字键1 进入微量级测量,如下页面:○1 核酸分析 (dsDNA, ssDNA 等)------Nucleic Acid ○2 蛋白分析 ----------------------Protein Step4○1按数字键1进入核酸分析界面Step5按数字键1进入dsDNA---双链DNA 分析Step5---第1步选择不同的Lid Factor---光程盖,有5倍、10倍、50倍、100倍、250倍可选,机器标配一般是10倍和50倍,先选50倍,如果提示浓度太低再换10倍的Step5---第2步选择右边的Units 浓度单位,一般选ng/ulStep5---第3步按绿色Sample 键进入分析界面,先用水或缓冲液点样,按Blank 键做空白校正,然后用搽镜纸把点样台和光程盖搽干净,把样品点到点样台中间的小镜子上,盖上光程盖,按绿色Sample 键3.5秒内显示测量结果Step5---第4步1、查看测量结果,左上角显示230nm 、260nm 、280nm 的吸光度,如果吸光度在0.01—1.5之间,结果是可以信赖的,在0.3是最准确的,在0.01—1.5范围之外的结果不可信赖2、左下角给出的比值如果在1.8—2.0之间说明客户提的核酸比较纯,小于1.8说明有蛋白质干扰,大于2.0说明有RNA 干扰;注:DNA :260/280=1.8---2.0,小于1.8说明有蛋白质干扰,大于2.0说明有RNA 干扰; RNA :260/280=2.0---2.5, 小于2.0说明有蛋白质干扰,大于2.5说明有寡聚RNA ; 蛋白质中所含核酸很少,对蛋白质的影响忽略不计。

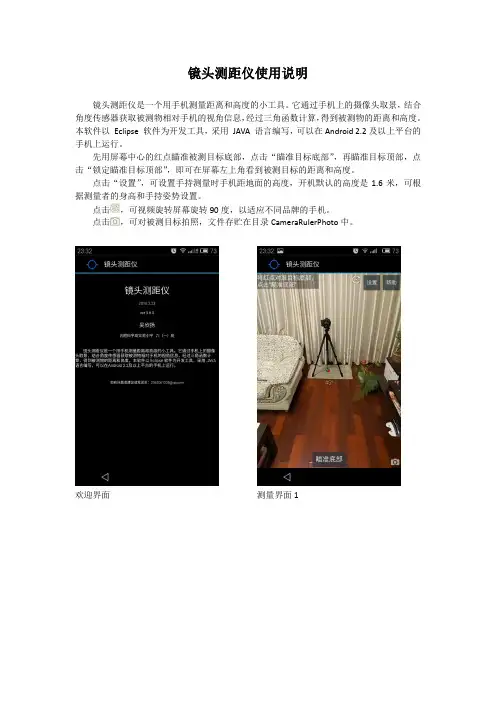
镜头测距仪使用说明
镜头测距仪是一个用手机测量距离和高度的小工具。
它通过手机上的摄像头取景,结合角度传感器获取被测物相对手机的视角信息,经过三角函数计算,得到被测物的距离和高度。
本软件以Eclipse 软件为开发工具,采用JAVA 语言编写,可以在Android 2.2及以上平台的手机上运行。
先用屏幕中心的红点瞄准被测目标底部,点击“瞄准目标底部”,再瞄准目标顶部,点击“锁定瞄准目标顶部”,即可在屏幕左上角看到被测目标的距离和高度。
点击“设置”,可设置手持测量时手机距地面的高度,开机默认的高度是1.6米,可根据测量者的身高和手持姿势设置。
点击,可视频旋转屏幕旋转90度,以适应不同品牌的手机。
点击,可对被测目标拍照,文件存贮在目录CameraRulerPhoto中。
欢迎界面测量界面1
测量界面2计算结果显示界面
帮助界面
设置界面。
多基线数字近景摄影测量近景摄影测量传统把近到一米内远到100米以内的摄影测量称为近景摄影测量。
这样近当然不可能在飞机上,因此,近景又可以称为地面摄影测量。
近景摄影测量难点:航空摄影测量是平行摄影,摄影要求简单,摄影很规范化,基线不变,摄影关系不变.交会角不变,利于匹配。
它的照片也很规则,各单模型是固定基线、摄摄影关系及交会角,非常规范.因而当计算机技术高速发展时,它容易通过连续的空中三角测量实现各单模型的连接和点的匹配传递从而达到自动化.但是同样是双目视觉的近景摄影测量是交向摄影,它的摄影条件非常复杂,拍摄要求非常苛刻,拍的照片远没有航摄平行摄影那样规范.它本身的这些因素使它永远解决不了匹配,交会角,精度三者的三角矛盾.无法实现自动化.三者矛盾:从精度而言:交会角大,基线长,精度高;交会角小,基线短,精度低.从匹配而言:交会角大,变形大,匹配难;交会角小,变形小匹配易;能满足两张影像变形不超过匹配的许可,而又能满足起码的精度,这样的交会角在传统的近景摄影测量---即基于双目观测原理中的近景摄影测量的地面摄影条件几乎是不存在的.这便是近几十年来近景摄影测量无实质进展的根本原因.矛盾解决:张院士把从空间一个点由两条光线交会的摄影测量基本法则变化为空间一个点由多条光线交会而成的全新概念,彻底解决了数字近景发展的难题。
LensphotoLensphoto介绍:A.新的理论原理;传统摄影测量无论是模拟方式,解析方式或是数字化方式,都是基于人眼双目立体视觉的基本原理。
Lensphoto实现了从传统基于人眼双目视觉原理到真正基于计算机视觉原理完成摄影测量的跨越;从近景摄影测量技术上讲,这是一套实现了质的飞跃的崭新技术。
以计算机视觉原理(多基线)代替人眼双目视觉(单基线)传统摄影测量原理,从空间一个点由两条光线交会的摄影测量基本法则变化为空间一个点由多条光线交会而成的全新概念。
B.新的数据获取方式;旋转多基线摄影:一个模型可以由多张照片生成,不再是一条摄影基线.多条基线多张照片同时构成多个模型.多基线摄影又分旋转和平行两种摄影方式.这是一种全新的摄影机制.与它对应的软件新处理技术基础便是计算机视觉原理.它将原来按“单模型”处理的交向摄影,扩展为多个模型的区域;比常规的“交向摄影的单模型”,可大大的减少控制点。
近景摄影测量摄影仪一、德国19/1318型摄影机1978年德国Zeiss厂生产的量测型摄影机,最初用于地面地形摄影测量,适于较远距离的中低精度的近景摄影测量,不适于近距离目标的摄影(要求距离小于300m)。
价格低,像幅大小13*18cm. 国产的DJS19/1318型摄影经纬仪功能与外形上大体与此相同(但可倾斜摄影,适于多种非地形摄影测量任务)。
结构:由镜箱和定向装置两部分组成。
镜箱部分:由镜头和成像部分(如承片框,内装干板,即感光材料);物镜焦距为190mm,非变焦镜头,物镜光圈固定为F/25,摄影机主距194 mm,超焦点距离约25 m,调焦距离为25m时,摄影目标的深度范围为25-∞。
手动曝光(未设快门装置),手动启闭物镜盖以控制曝光时间),故采用低感光度摄影材料。
摄影方式:正直摄影及转90度摄影;摄影机光轴不能倾斜(故只能正直摄影或等偏摄影),但物镜可沿导轨相对承片框上下移动(移动范围:+35~-45mm),以适应较高或较低目标的摄影。
定向装置:镜箱顶部有定向装置,可确定摄影时的方位(在物方空间坐标系的方位,即外方位角元素的前两个元素,后一个用跨水准器测得)。
若与GPS相连,可获取外方位线元素。
镜箱上方:有两个相互垂直的管水准器,用于控制摄影机竖轴,使之处于铅垂位置,以保持摄影机光轴水平,保持上下框标连线的铅竽特点。
特点:附有改正镜头光学畸变系数参数,镜头畸变差较小(最大光学畸变差为±6μ)。
不可调焦(不可调主距),光圈及曝光时间不可改变;具有记录改变像主点位置的装置。
采用机械压平方式。
无补光装置,仅依靠足量的光能成像)单个站标,步骤:测量基线长度,取景,定向,摄影,洗像,晒像,定影,显影。
二、德国Zeiss Opton TMK6型摄影机参数:像幅大小9*12μm,摄影主距为60mm,摄影距离5-∞,可0,90两档摄影,配置六个近景镜头(0.5,0.6,0.75,1.0,1.5,2.5m)特点:电子曝光;通过改变焦距镜头(0.5-2.5m)可改变摄影主距;小像幅,可测光量;可使镜头倾斜,但无测任意角的装置。
近景摄影测量技术的操作流程与精度评定摄影测量技术是一种通过摄影测量仪器和设备对地面物体进行测量和分析的技术手段。
它广泛应用于地质勘测、地理信息系统、城市规划、环境监测等领域。
本文旨在介绍近景摄影测量技术的操作流程和精度评定方法。
一、摄影测量技术的操作流程近景摄影测量技术的操作流程主要包括:1. 摄影测量前的准备工作:包括选择合适的摄影测量设备、选择拍摄点位和确定控制点等。
2. 摄影测量数据的采集:根据预定的拍摄点位,使用摄影测量设备进行数据采集。
可以使用全站仪等设备辅助测量控制点的坐标。
3. 摄影测量数据的处理:将采集到的摄影测量数据导入计算机软件进行处理。
首先进行镜头校正,消除镜头畸变。
然后提取特征点,用于相对定向和绝对定向。
4. 相对定向:通过对特征点的测量和分析,确定各个照片之间的相对位置关系,建立起相对坐标系。
5. 绝对定向:将相对坐标系与已知地理坐标系进行配准,确定照片上的每个点在地理坐标系中的坐标。
6. 三维重建:根据相对定向和绝对定向的结果,进行三维模型的重建。
可以利用数字表面模型(DSM)和数字地面模型(DTM)进行地形表面的建模和分析。
7. 精度评定:使用不同的评定方法对摄影测量结果进行精度评定,以确保测量结果的可靠性和准确性。
二、摄影测量技术的精度评定方法近景摄影测量技术的精度评定是保证测量结果可靠性的重要环节。
根据国际测量学会(ISPRS)制定的标准,可以使用以下几种方法进行精度评定。
1. 接地控制点比对法:将测量的控制点与已知的地面控制点进行比对。
通过计算控制点的平均误差和均方根误差(RMSE,Root Mean Square Error)来评估测量结果的精度。
2. 物方控制点比对法:在摄影测量中,可以选择一些物体上的控制点,通过与实际物体的测量结果进行比对,评定测量结果的精度。
3. 自由空间均匀分布点平差法:通过选取一系列自由空间均匀分布的点,进行均方根误差的计算,评估摄影测量结果的精度。
多基线近景摄影测量系统教育版简介——Lensphoto Edu 系统简介多基线数字近景摄影测量系统(Lensphoto)是属于测绘科学技术领域最新近景摄影测量的应用软件. 它是基于摄影测量专家张祖勋院士最新提出的计算机视觉原理(多基线)代替人眼双目视觉(单基线)传统摄影测量原理,从空间一个点由两条光线交会的摄影测量基本法则变化为空间一个点由多条光线交会而成的全新概念,从而研发产生的一套全新的数字近景摄影测量系统。
它使近景摄影测量技术发生了质的巨大飞跃,并为其打开了巨大的应用空间。
这是一种以少量点的空间坐标与摄影测量丰富的影像信息结合在一起,快速建立高精度的被摄物数字立体模型的测绘新技术。
自2007年Lensphoto诞生到今天,Lensphoto专业版不仅已拥有各行业众多用户及三十余所高校用户,而且其中不乏中科院国家天文台,中科院寒干冻地研究所,中科院沙漠研究所,中科院水电研究所,故宫博物院这样的高端用户。
在水利电力测量,建筑测量,文物保护,变形监测,矿山测量等等各个领域起到了不可替代的作用!技术创新多基线数字近景摄影测量系统Lensphoto关键技术是多基线摄影及多基线多影像全新立体匹配:①旋转摄影:改变传统近景摄影测量的两张照片一个模型的摄影测量基本原理(即双目观察原理),由传统两个摄站对被摄物拍两张重叠照片生成模型变为由多个摄站,每个摄站对被摄物拍若干张一定重叠度的像片,构成多基线多影像组序列,生成模型。
Lensphoto 软件系统对序列影像的处理,其实质是由传统的双目立体视觉原理应用改变为计算机立体视觉原理应用;这一变化,使近景摄影测量技术发生质的飞跃。
并将航空摄影测量中的自动化化技术第一次成功运用到近景摄影测量技术中,实现了人们多年的梦想。
②基于短基线多影像的多基线立体匹配技术:它是基于多基线多影像而采用的新匹配技术。
这是一种不同于并且远优于以往松弛法匹配的影像匹配技术。
同时具有接受较大远景和近景之差的能力。
近景摄影测绘技术的操作步骤近景摄影测绘技术是一种利用摄影测量原理和方法,通过摄影设备对近距离拍摄的对象进行精确测量和三维建模的技术。
它在土地测绘、建筑设计、古建筑保护、文物修复等领域具有重要应用价值。
下面将介绍近景摄影测绘技术的操作步骤。
第一步:确定测区范围和目标在进行近景摄影测绘之前,首先需要明确测区的范围和目标。
测区可以是一个建筑物、一个景区或一片农田等。
根据测区的特点,确定摄影设备的位置、角度和拍摄方式,并确保目标物体完整、清晰可见。
第二步:选择合适的摄影设备近景摄影测绘要求摄影设备的像素高、焦距长、所采集的图像具有良好的清晰度和色彩还原能力。
常用的设备包括数码相机、单反相机、无人机等。
根据具体测区的需求选择合适的设备,并确保设备能够满足测绘精度的要求。
第三步:拍摄控制点为了进行精确的摄影测绘,需要在测区内设置若干控制点。
这些控制点可以是人工标志、地面点或其他已知位置的点。
通过拍摄这些控制点,并记录其在测区坐标系中的位置,可以用于后期图像处理与坐标计算。
第四步:拍摄图像在控制点布设完毕后,开始进行摄影测绘工作。
根据测区情况,选择合适的拍摄方式(垂直拍摄、斜角拍摄等),并按照一定的拍摄覆盖率进行图像采集。
拍摄时要注意光线条件,避免出现明暗不均或过曝的情况。
第五步:图像处理与特征提取获得图像后,需要进行图像处理与特征提取工作。
这一步骤包括镜头畸变校正、图像配准、影像融合等操作。
通过这些处理,可以提取出对象的特征点及其坐标、方位角等信息。
第六步:三维建模与精度改正在获得特征点信息后,可以利用摄影测量的原理进行三维建模。
根据不同的建模需求,可以选择不同的建模方法,如三角测量法、光束法、立体重建法等。
同时,还需要对测区进行精度改正,纠正因地面高程、轨迹误差等因素带来的误差。
第七步:数据分析与应用根据建模结果,可以进行数据分析与应用工作。
例如,可以计算对象的尺寸、体积、表面积等信息,并针对应用需求进行分析。
序言改变传统的近景摄影手工测量方式,利用计算机实现近景摄影测量的自动化工作,提高生产效率,降低劳动强度,是完全可能和必要的。
《Lensphoto多基线数字近景摄影测量系统》正是为了实现这个目标而诞生的。
本系统利用张祖勋院士提出的计算机视觉代替人眼的“短基线、多影像摄影测量”原理,将少量全站仪测量的高精度点位坐标与摄影测量丰富的影像信息结合起来,建立高精度的地形数字化模型。
“短基线、多影像摄影测量”的主要特点是:首先按要求拍摄大量具有较短基线和不同交会角的序列影像,然后通过少量物方控制点的空间坐标及其对应的像点坐标建立空间关系,从而解算出相机参数和影像外方位元素;进而计算出由先进匹配算法获取的大量同名点的空间坐标。
使用本系统可以大大提高生产效率,降低工作者野外的劳动强度。
欢迎大家在使用过程中提出各种宝贵意见,让我们的软件能够更好的为您服务。
目录序言1目录2 1软件介绍41.1技术特点4 1.2系统功能4 1.3系统组成4 2安装与初始化62.1系统需求6 2.2安装6 2.3卸载6 3工作流程73.1工作流程73.2目录文档表8 3.2.1准备文件8 3.2.2 中间文件和结果文件84软件使用9 4.1软件启动94.2相机检校9 4.2.1拍摄格网9 4.2.2相机检校10 4.2.3相机参数文件转换(输入输出) 14 4.2.4畸变差改正154.3工程管理17 4.3.1新建工程17 4.3.2选择工程(工程切换)21 4.3.3编辑工程22 4.3.4输入输出224.4空三匹配22 4.4.1添加种子点22 4.4.2匹配24 4.4.3输入输出244.5控制点量测24 4.5.1指定控制点信息24 4.5.2手工量测控制点25 4.5.3手工量测控制点+模板半自动匹配25 4.5.4全自动模板匹配26 4.5.5立体量测27 4.5.6输入输出274.6整体平差27 4.6.2输入输出284.7立体编辑28 4.7.1界面说明294.7.1.1菜单介绍304.7.1.2控制面板:34 4.7.2 立体编辑37 4.7.3输入输出394.8 DEM立体编辑40 4.8.1界面说明40 4.8.2 立体编辑46 4.8.3输入输出49附录A:数据获取50附录B:拍摄模式51附录C:精度说明52附录D:专业名词551软件介绍在工程测量中,通过地面摄影和少量的控制点,经过影像匹配、空中三角测量和前方交会,就能得到所摄目标的密集点云。
I n p h o软件作业指导-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII前言Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等。
空中三角测量MATCH-AT全自动空三(支持推扫式相机ADS4)inBlock光束法区域网平差地形建模MATCH-T自动生成DSM/DTMDTMaster DTM/LiDAR点编辑正射影像处理OrthoMaster生成真正射影像OrthoVista几百幅图像一起匀色和镶嵌为了方便4D产品的生产,特编写本指导书,结合自己经验和参考手册。
许多内容通过翻译,欠妥之处,还请指正。
本书着重介绍MATCH-AT MATCH-T DTMaster OrthoMaster OrthoVista五个模块。
1.1.MATCH-AT 自动空三加密S S T T E E P P11新建工程,需要以下几个数据:数字影像相机文件外方位元素初始值外业控制资料(控制点成果和刺点片)工作内容•指定项目名称•载入近似中心(GPS、INS)•载入图像•确定单位,像素大小,照相机的名称和mount rotation,地形高度•自动设定块打开Match-AT,点击,下拉点击弹出对话窗①输入工程名和存储路径②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标。
格式如下2750 388000 5000000 3000 /航片号 X坐标 Y坐标 Z坐标2749 389000 5000000 30002748 390000 5000000 3000# /航带分隔符2779 360000 4997000 30002780 361000 4997000 30002781 362000 4997000 3000#…………#如果是GPS辅助摄影,按# Strip 1759 539286.802 335214.655 1774.851 -1.8738 -0.3952 -3.4960760 539839.899 335206.408 1782.623 -1.5935 -0.3668 -3.4721761 540439.471 335192.804 1783.540 0.2288 0.8253 -3.7421# Strip 2... ... ...顺序导入,航带之间用“#”隔开。
前言这本书以最简单的方法介绍如何用胶片,录影带和其他的媒体方式来拍摄我们所需要的图像。
如果你是,或者在计划着要成为,一名摄影师,那么我建议你读这本书的副本(摄影师操作手册)。
当你了解了两者,你就可以走出去拍摄有用的素材。
如果你并不感兴趣成为一名摄影师,只是想更好的了解怎么去用摄像机,那么你不需要去读副本。
那么就在休闲放松中去享受的阅读这本书吧。
1.基本知识曝光曝光时通过相机的镜头并到达胶片或CCD 芯片的光的数量。
在镜头中间的孔是通过镜头传过来的光,这个孔是相机的光圈。
如果光圈大,那么它就可以吸收很多的光。
如果光圈小,它就会吸收很少的光。
光圈的大小是由镜头外侧的F 光圈读数来调节的。
一个F 光圈仅仅是衡量光圈的大和小的。
我发现最简单的方法去理解F光圈读数是去用分段的方式,因为F光圈读数就是分段形式的。
F/2 的意思是相机的光圈是镜头的1/2长。
F/16 的意思是相机的光圈是镜头的1/16长。
当你看完这个图,你可能会比较容易的了解为什么在黑暗的屋子里,有可能会用到F/2的读数来尽可能的拍摄到所有的光。
反过来说,在外面有强烈阳光的时候,你已经有了很多的光,你可能会把读数将到F/11或者F/16,以便使光变的少一些。
一个F/2的光圈并非一定是光圈镜头的1/2长度。
但是在肉眼看来它是镜片的1/2长。
F/2 读数的光圈所进来的光就好像是光圈镜头1/2长度时所进来的光。
这个是非常重要的事情。
F 的读数是从F/1到F/22,甚至更多来划分的。
每一个的划分都只是允许前一个读数的1/2的光进来。
这个程序是这样的:发F/1,F/1.4, F/2, F/2.8, F/5.6, F/8,F/11, F/16, F/22, F/32, F/45, F/64,等等。
F/1.4 的读数允许F/1 的一半的光进来。
F/4 的光允许F/2.8的光进来。
光圈的每一个划分都只是允许前一个读数的1/2的光进来很多新的光圈镜头都标志着F 读数和T 读数,或者只是标志着T读数。
CAMERA POSITIONINGOnce you have established your optimal camera separation (using the B/H ratio referred to below), it is important to plan your camera positions. Remember that PI-3000 can only model COMMON PIXELS that are present in both the left and the right photos of a given pair so if the camera is angled inwards, or part of the scene to be mapped disappears when you move from left to right you need to consider a different viewpoint, move in closer or include another pair of photos to fill in the missing data.The separation of the two camera positions in the stereo pair (called the base length) is a function of the distance from the target (referred to as the height). We are looking for a B/H ratio of 0.2 - 0.3 ideally. Imagine that you are 10 metres away from your target. What should the camera separation be?(H)eight = 10m(B)ase = ???Result ratio = 0.3Therefore to achieve the result we apply the formula: B/10 = 0.3. i.e. B = 3mYou can pace out the distance from the target or use a tape or disto measurer. Practice and plan each of the camera positions before taking the images. This is by far the most important part of the survey process – remember garbage in = garbage out!USE OF TARGETSYou can dramatically increase efficiency at the image orientation stage by using circular targets of a size to suite your scene. Use of the auto-elipse centre detection process in PI-3000 makes target definition very easy and far more accurate. If you don’t have targets then you can still use any visible point feature such as a stone, paint mark, corner etc that is visible in each photograph of the stereo pair.TIP: remember the centre mouse button for auto-correlation of target picking in the orientation screen.USE A TRIPODIt is sometimes said that “your sharpest lens is your tripod.” Use a tripod whenever possible – camera shake can occur even at supposedly safe handheld shutter speeds of 1/60 second. Camera shake is even more of a concern if you adopt the small aperture (f/22) approach of maximising depth of field. For very long shutter speeds, use of a cable release can minimise camera movement due to pressing the shutter. (NB it’s ok to use a flash).TIP: take two or more shots at each camera position to allow to insure against any errors due to camera shake, exposure problems etc.GET FAMILIAR WITH YOUR EXPOSURE COMPENSATION SETTINGThe best light for photogrammetry is often on overcast days where extreme contrasts between light and shadows are less of a problem. Remember that if parts of your images are in shadow (too dark) or bright white (too light) then the image processingmay fail in these areas. Plan the timing of your photography to take into account the position of the sun and maybe return at different times of the day to capture different elevations of a building for example.A way to avoid over or underexposure is to use exposure compensation. This is a way of overriding the camera’s automatic exposure which aims to find an optimal setting for the whole scene. For example where you scene contains a lot of sky you could overexpose the image to get a better exposure on the target, If the sky is blown out and overexposed it does not matter as this is not part of your photogrammetric model. Most cameras have an automatic setting called <exposure bracketing> which takes 3 shots each with different exposures settings so you can choose the best one.POST PROCESSING:It is sometimes desirable to improve the aesthetic appeal of an image by applying some post processing in a photo editing package such as Adobe Photoshop or PSP. The most common quick fixes include (a) exposure levels and (b) unsharp mask. Some cameras have picture programs to produce pleasing results straight of the camera. The new generation of Nikon DSLRs are best, followed by Canon’s 400D or upwards. Ironically the high end professional digital SLR cameras produce the worst images in terms of softness and colour when compared to the same scene taken with a cheap point and shoot compact however once some post processing is applied to the pro images there is no comparison. Shooting RAW is another way to get the best results, but this is a more complex and time consuming process beyond the scope of this quick guide.。