送料机械手设计
- 格式:doc
- 大小:1.39 MB
- 文档页数:29
自动送料装置机械手设计目录摘要 (I)Absrtact (II)第1章绪论 (1)1.1 引言 (1)1.2 研发目的及意义 (1)1.3 机械手的内容 (1)1.3.1 用途 (1)1.3.2 技术参数 (2)第2章手部设计 (3)2.1 概述 (3)2.2 初选型号 (3)2.2.1 真空吸盘 (3)2.2.2真空发生器 (4)2.3 真空吸盘的吸力计算 (4)2.4手臂伸缩驱动力的计算 (5)2.5手臂升降和回转部分结构设计 (6)2.6手臂升降气缸的设计 (6)2.6.1驱动力计算 (6)2.6.2气缸的直径 (7)2.6.3活塞杆直径的计算 (8)2.6.4缸筒壁厚计算 (9)第3章气压传动系统设计 (10)3.1气压系统传动的选定 (10)3.2气压传动系统工作原理图 (10)第4章手腕设想 (12)4.1 概述 (12)4.2 腕部联想重点 (12)4.3 典型腕部结构 (12)第5章机械手的PLC控制设计 (13)5.1可编程序掌握的各种原件 (13)5.2 PC指令系统 (14)5.3编写机械手的PLC控制指令 (15)结语 (18)参考文献 (19)致谢 (20)附录 (21)自动送料装置机械手设计摘要:机械手是按固定程序抓取、搬运物件或操作工具的自动操作装置,能够代替人去完成一些重复、繁琐以及危险的操作。
本文应用三菱公司生产的可编程控制器FX2N,实现机械手搬运控制系统,该系统充分利用了可编程控制器(PLC)控制功能。
使该系统可靠稳定,时期功能范围得到广泛应用。
机械手的动作顺序为:按下启动按钮——机械手下降至取料处——左移至待加工材料处——机械手夹紧加工材料——机械手右移至预定位置——机械手松开加工材料——机械手左移——机械手上升至预定高度(安全点)并循环执行。
关键词:机械手;PLC;气动控制;自动化Design of manipulator for automaticfeeding deviceAbsrtact:A manipulator is an automatic operating device for grabbing, moving objects or operating tools according to a fixed procedure. It can perform repetitive, cumbersome and dangerous operations instead of human beings. In this paper, the programmable controller FX series PLC, produced by Mitsubishi company is used to realize the manipulator handling control system. The system makes full use of the programmable controller (PLC) control function. So that the system is reliable and stable, and the period function range is widely used. The order of action of the manipulator is as follows: press the start button-the manipulator drops to the reclaimer-move left to the material to be processed-the manipulator clamps the machining material-the manipulator moves right to the predetermined position-the machine The hand loosens the machining material-the manipulator moves to the left-the manipulator rises to a predetermined height (safety point) and circulates.Key words: Manipulator; PLC; pneumatic control; automation第1章绪论1.1 引言机械手在生活的应运已经有着无法脱离的重要,对于我们生活也是起着尤为重要的一个角色。
1 绪论1.1 机器人目前,工业机器人的定义,世界各国尚未统一,分类也不尽相同。
最近联合国国际标准化组织采纳了美国机器人协会给工业机器人下的定义:工业机器人是一种可重复编程的多功能操作装置,可以通过改变动作程序,来完成各种工作,主要用于搬运材料,传递工件。
参考国外的定义,结合我国的习惯用语,对工业机器人作如下定义:工业机器人是一种机体独立,动作自由度较多,程序可灵活变更,能任意定位,自动化程度高的自动操作机械。
主要用于加工自动线和柔性制造系统中传递和装卸工件或夹具[1]。
工业机器人以刚性高的手臂为主体,与人相比,可以有更快的运动速度,可以搬运更重的东西,而且定位精度相当高,它可以根据外部来的信号,自动进行各种操作。
工业机器人是在计算机控制下可编程的自动机器。
采用工业机器人是提高产品质量与劳动生产率,实现生产过程自动化,改善劳动条件,减轻劳动强度的一种有效手段。
机器人的诞生和发展虽只有30多年的历史,但它已应用到国民经济,民事技术等众多的领域,具有广阔的应用和发展前景,显示出强大的生命力[2]。
根据所处的环境和作业需求,工业机器人具有至少一项或多项拟人功能,如抓取功能或移动功能,或两者兼有之,另外还可能程度不等的具有某些环境感知功能(如视觉,力觉,触觉等)。
以及语音功能及至逻辑思维,判断决策功能等。
从而使其能在要求的环境中代替人进行作业。
在工业机器人的诸多功能中,抓取和移动是最主要的功能。
这两项功能实现的技术基础是精巧的机械结构设计和良好的伺服控制驱动。
本次设计就是在这一思维下展开的。
根据设计内容和需求确定圆柱坐标型工业机器人,利用锥齿轮传动实现机器人的旋转,利用液压缸实现其移动以及对零件的抓取。
在步进电机的控制下,机器达到精确的回转运动。
工业机器人的发展,由简单到复杂,由初级到高级逐步完善,它的发展过程可分为三代:第一代工业机器人就是目前工业中大量使用的示教再现型工业机器人,它主要由手部、臂部、驱动系统和控制系统组成。
摘要
在当下生产过程中正在向机械化,与自动化方向发展。
在机械工业中装卸、装配等环节中利用的机械手会越来越广泛。
上下料机械手采用了两个旋转关节和一个运动关节;两个回转关节完成x,y目标的运动,而移动关节则完成z目标的运动。
机械手可以根据人们事先设定好的程序来进行运转,能够模仿人手完成抓取、搬运工件等一系列运动。
它在二十世纪五十年代就已经在工厂里工作了,是在搬运机械手的基础上成长起来的一种机器,开始主要实在上下料和搬运工件等工作形势中,随着运用领域的不段发展,当下主要用来夹持工具和完成大部分的作业。
在当代生产中,它可以代替人大部分的工作量。
本次设计的上下料机械手主要从以下几个方面进行设计说明:
第一,首先对机械手的发展进行论述,简单介绍了机械手在国内外的发展历史和研究方向。
第二,提出总体方案,并简要说明这些机构中的单元解。
最后结合自己看过和参考的文献,提出自己的总体设计方案。
第三,对机械手的各个部件进行分析计算,并对关键零件进行校核,然后利用专业软件进行画图。
在设计的过程中对其进行详细的计算,力争使结构合理,起到优化设计的目的。
关键词:送料、液压、机械手。
热镦挤送料机械手课程设计热镦挤送料机械手是一种用于热镦挤压生产线上的自动化设备,它具有高效、精准的特点。
本文将探讨热镦挤送料机械手的课程设计。
热镦挤压是一种金属加工方法,通过在高温下将金属材料挤压成特定形状。
在热镦挤压生产线上,热镦挤送料机械手起到了关键的作用。
它能够将金属材料从储料架上取下,并准确地送入热镦挤压机中进行加工。
因此,热镦挤送料机械手的设计至关重要。
我们需要确定热镦挤送料机械手的基本参数。
根据生产线的要求,我们需要考虑机械手的负载能力、工作范围、速度等。
负载能力应能够满足挤压机的要求,工作范围应能够覆盖整个挤压机工作区域,速度应能够保证生产效率。
在确定这些参数后,我们可以开始进行机械手的设计。
我们需要选择合适的机械结构。
热镦挤送料机械手通常采用多自由度机械结构,以实现复杂的运动轨迹。
对于挤压机上下料的过程,我们可以采用多关节机械手,它能够实现多方向运动,并能够精确控制位置和姿态。
此外,我们还可以考虑使用气动或电动执行机构,以实现更精准的控制。
然后,我们需要设计机械手的控制系统。
控制系统应能够准确地控制机械手的运动,并保证其稳定性和安全性。
在设计控制系统时,我们可以采用传统的PID控制算法,也可以使用现代的自适应控制算法。
此外,我们还需要考虑机械手与挤压机之间的协作,以确保二者之间的同步运动。
我们需要考虑机械手的安全性和可靠性。
挤压生产线通常是高温、高速、高载荷的工作环境,因此机械手需要具备耐高温、耐磨损、抗震动等特性。
此外,我们还需要设计相应的安全保护装置,以防止意外事故的发生。
热镦挤送料机械手的课程设计需要考虑机械手的基本参数、机械结构、控制系统以及安全性和可靠性等方面。
在设计过程中,我们需要充分考虑生产线的要求,并结合现代控制技术和工程材料的特性,以实现高效、精准的热镦挤压生产。
通过合理的设计和优化,热镦挤送料机械手将成为热镦挤压生产线上不可或缺的重要设备。
第一章机械手的简介机器人概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设各,也是先进制造技术领域不可缺少的自动化设备。
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用。
机械手的结构形式开始比较简单,专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
工业机器人(英语:industrial robot。
题目:自动送料装置机械手设计目录摘要 (I)Abstract........................................................... I I 第1章机械手的介绍. (1)1.1机械手的现状 (1)1.2机械手的控制系统 (1)1.3机械手的发展 (1)第2章机械手的结构要求 (3)2.1机械手的组成 (3)2.2机械手的工作过程 (3)2.3机械手的控制要求 (4)2.4气动控制回路 (4)第3章机械手控制设计 (6)3.1 PLC的选型 (6)3.2 PLC的I/O分配 (6)第4章外部接线图 (8)第5章机械手转移图和梯形图 (9)5.1机械手转移图和梯形图设计 (9)5.2机械手指令程序 (12)5.2.1机械手自动控制指令程序 (12)5.2.2机械手手动控制指令程序 (14)结论 (16)参考文献 (17)自动送料装置机械手设计摘要:在现代生产过程中,机械手被广泛的运用于自动生产线中,在生产型企业中使用机械手改变生产方式是减轻企业对用工的依赖性,降低生产成本,实现可持续发展的转变思路。
PLC控制机械手可按使用要求选购相应的产品完成复杂的逻辑控制,其以逻辑控制为主,也可以组成模拟量控制系统,软硬件开发工作量较少,输出带负载能力和抗干扰能力强,可靠性好,环境适应能力强。
机械手可以通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点。
关键词:机械手;PLC控制;逻辑控制Automatic feeding device robot designAbstract: In the modern production process, robots are widely used in automatic production lines. The use of robots to change production methods in production enterprises is to reduce the dependence of enterprises on employment, reduce production costs, and realize the transformation of sustainable development. The PLC control robot can select the corresponding products to complete the complicated logic control according to the requirements of use. It is mainly based on logic control, and can also constitute an analog quantity control system. The software and hardware development work is less, the output load capacity and anti-interference ability are strong. , good reliability and strong environmental adaptability. The robot can be programmed to perform various expected tasks, combining the advantages of both man and machine in construction and performance.Key words: robot; PLC control; logic control第1章机械手的介绍1.1机械手的现状机械手是工厂自动化生产不要人工的过程中发展起来的一种新的操作设备。
送料机械手的设计摘要:随着工业技术水平的高速发展,人们生活水平显著提高,对于生活工作的环境有了更高的期望,为了构建更幸福美好的家园而不断努力。
工业机器人的发展不仅是人类文明的必要趋势,也是人们的美好期许。
它不仅可以极大程度上提高生产效率,还能在极多的恶劣环境下代替人工,代替人工去完成繁重、重复的单调工作,减轻人们的工作压力,在许多工业生产当中,单点重复繁重的生产工作是不可避免的,这是许多工业的生产特性,而往往在生产的过程中还伴随着高温、粉尘、噪声、具有放射性或者有害人体身心健康的因素。
在这种情况下,工业机器人或者自动化结构去代替人们工作就更有优势,工业机器人的发展有着更加广阔的前景。
关键词:液压系统;四自由度;圆柱坐标式机械手;锻机1.机械手的技术要求机械手是实现工业生产过程自动化,提高劳动生产率的一种有力工具。
在上一道工序将经过高温加热的工件送到取料点后,机械手快速取得加工件,随后送到精锻机,完成本工序的加工,随后变换工位,复位,等待下一工件的到来,完成加工件的转移。
对机械手的基本要求如下:(1)工件类型:待加工的工件为圆柱形金属。
(2)负载能力:不小于60N。
(3)在上一道工序将经过高温加热的工件送到取料点后,机械手快速取得加工件,随后送到精锻机。
(4)机械手的结构设计合理,稳定性强,安全性好,能耗小,便于操作。
(5)后期维护成本小,性价比高。
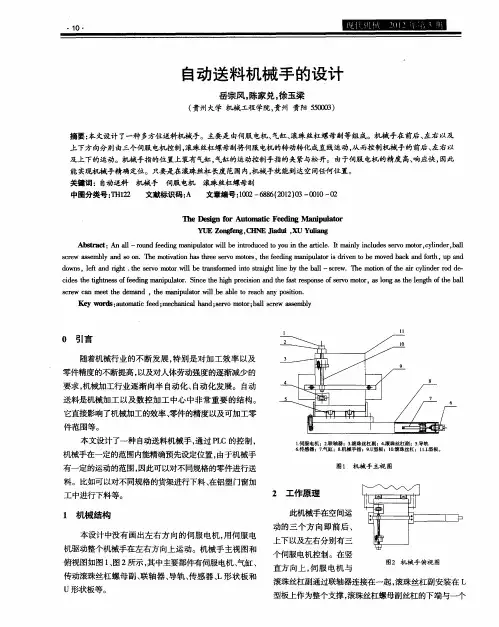
2.机械手总体结构设计1-手臂升降机构、2-升降行程开关、3-连接部件、4-回转齿轮、5-回转油缸、6-配重、7-手臂伸缩机构、8-手腕、9-手部、10-回转定位油缸。
本系统主要由手臂升降机构、回转齿轮、回转油缸、手臂伸缩机构、腕部、夹手部、回转定位油缸等组成。
液压系统为其提供动力,手臂升降机构、回转齿轮、回转油缸等完成机械手位置的改变,回转定位油缸管控机械手的定位精度、通过手部、腕部、臂部的配合动作,实现对物料的抓取、转移、喂料等动作。
抓取机构选用滑槽杠杆式机械手抓,双作用式单杠活塞油缸作为驱动手爪的装置。
热镦挤送料机械手课程设计一、引言热镦挤送料机械手作为现代工业制造中的重要设备之一,具有高效、精准的特点,在金属加工领域得到广泛应用。
本文将围绕热镦挤送料机械手的课程设计展开,通过对其原理、结构、控制系统等方面进行详细介绍,为读者提供了解该设备的全面指南。
二、热镦挤送料机械手的原理和结构热镦挤送料机械手是由机械结构和控制系统组成的自动化设备。
机械结构包括机械臂、末端执行器等部分,而控制系统则是控制机械手运动和操作的核心。
热镦挤送料机械手通过控制系统的精确指令,驱动机械臂进行各种工作动作,实现对工件的加工和运输。
三、热镦挤送料机械手的课程设计目标在热镦挤送料机械手的课程设计中,我们的目标是让学生了解和掌握该设备的基本原理和工作方式,培养其对工业自动化设备的理解和应用能力。
通过设计实际的工作场景,让学生能够独立运用所学知识,解决实际问题。
四、课程设计内容1. 设计一个基于热镦挤送料机械手的自动化生产线,包括工作台、送料输送带、热镦挤送料机械手等设备的布局和连接。
2. 研究机械手的运动学和动力学特性,确定机械手的结构参数和运动范围。
3. 设计机械手的控制系统,采用PLC或单片机等控制器,编写相应的控制程序。
4. 进行实际的机械手控制实验,调试控制系统,验证设计的可行性和准确性。
5. 分析机械手的性能指标,如定位精度、重复定位精度等,对设计进行评估和改进。
五、课程设计过程1. 研究热镦挤送料机械手的工作原理和结构,了解其关键技术和应用领域。
2. 设计自动化生产线的布局和连接方式,确定各设备的位置和工作流程。
3. 进行机械手的运动学和动力学分析,确定机械手的结构参数和运动范围。
4. 设计机械手的控制系统,选择合适的控制器和编程工具,编写控制程序。
5. 进行实际的机械手控制实验,调试控制系统,验证设计的可行性和准确性。
6. 分析机械手的性能指标,如定位精度、重复定位精度等,对设计进行评估和改进。
六、课程设计的意义和价值通过对热镦挤送料机械手的课程设计,学生可以深入了解和掌握该设备的原理和应用,培养工程实践能力和创新思维。
自动送料装置机械手设计目录摘要 (I)Absrtact (II)第1章绪论 (1)1.1 引言 (1)1.2 研发目的及意义 (1)1.3 机械手的内容 (1)1.3.1 用途 (1)1.3.2 技术参数 (2)第2章手部设计 (3)2.1 概述 (3)2.2 初选型号 (3)2.2.1 真空吸盘 (3)2.2.2真空发生器 (4)2.3 真空吸盘的吸力计算 (4)2.4手臂伸缩驱动力的计算 (5)2.5手臂升降和回转部分结构设计 (6)2.6手臂升降气缸的设计 (6)2.6.1驱动力计算 (6)2.6.2气缸的直径 (7)2.6.3活塞杆直径的计算 (8)2.6.4缸筒壁厚计算 (9)第3章气压传动系统设计 (10)3.1气压系统传动的选定 (10)3.2气压传动系统工作原理图 (10)第4章手腕设想 (12)4.1 概述 (12)4.2 腕部联想重点 (12)4.3 典型腕部结构 (12)第5章机械手的PLC控制设计 (13)5.1可编程序掌握的各种原件 (13)5.2 PC指令系统 (14)5.3编写机械手的PLC控制指令 (15)结语 (18)参考文献 (19)致谢 (20)附录 (21)自动送料装置机械手设计摘要:机械手是按固定程序抓取、搬运物件或操作工具的自动操作装置,能够代替人去完成一些重复、繁琐以及危险的操作。
本文应用三菱公司生产的可编程控制器FX2N,实现机械手搬运控制系统,该系统充分利用了可编程控制器(PLC)控制功能。
使该系统可靠稳定,时期功能范围得到广泛应用。
机械手的动作顺序为:按下启动按钮——机械手下降至取料处——左移至待加工材料处——机械手夹紧加工材料——机械手右移至预定位置——机械手松开加工材料——机械手左移——机械手上升至预定高度(安全点)并循环执行。
关键词:机械手;PLC;气动控制;自动化Design of manipulator for automaticfeeding deviceAbsrtact:A manipulator is an automatic operating device for grabbing, moving objects or operating tools according to a fixed procedure. It can perform repetitive, cumbersome and dangerous operations instead of human beings. In this paper, the programmable controller FX series PLC, produced by Mitsubishi company is used to realize the manipulator handling control system. The system makes full use of the programmable controller (PLC) control function. So that the system is reliable and stable, and the period function range is widely used. The order of action of the manipulator is as follows: press the start button-the manipulator drops to the reclaimer-move left to the material to be processed-the manipulator clamps the machining material-the manipulator moves right to the predetermined position-the machine The hand loosens the machining material-the manipulator moves to the left-the manipulator rises to a predetermined height (safety point) and circulates.Key words: Manipulator; PLC; pneumatic control; automation第1章绪论1.1 引言机械手在生活的应运已经有着无法脱离的重要,对于我们生活也是起着尤为重要的一个角色。
学号 000000000毕业设计设计题目:送料机械手学院: 0000 000专业:000000000 班级 0000姓名: 0000000指导教师: 00000000日期:年月日- 1-诚信声明本论文是我个人在老师指导下,按任务书要求,自己撰写的论文。
该论文凡引用他人的文章或成果之处都在论文中注明,并表示了谢意。
除此之外都是自己的工作成果。
若本论文及资料与以上声明不符,本人承担一切责任。
本人签名:日期:年月日- 3 -设计任务书班级:0000000000 学生:000000000 学号:0000000000设计题目:送料机械手摘要:设计一个送料机械手,应用于工业自动化生产线,把工业产品从一条生产线搬运到另外一条生产线,实现自动化生产,减轻产业工人大量的重复性劳动,同时又可以提高劳动生产率。
设计内容及要求:1. 采用气动驱动方式2. 选取至少3个-4个运动自由度,设计出机械手的各执行机构,包括:手部、手腕、手臂等部件的设计。
3.设计出机械手的气压传动系统,包括气动元器件的选取,气动回路的设计,并绘出气动原理图4.采用可编程序控制器(PLC)对机械手进行控制,本课题将要选取PLC 型号,根据机械手的工作流程编制出PLC 程序,并画出梯形图 5.技术参数(1) 抓重:8kg(2) 自由度数:4个自由度 (3) 最大工作半径:1500mm (4) 工件直径尺寸: mm mm 15080φφ-(5) 气动原理图 1张(A2) 气缸装配图 1张(A0) 夹持机械手零件图 3张(A3、A4)指导老师(签字): 年 月 日前言近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。
电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求;微电子技术的引入,促进了电气比例伺服技术的发展。
自动上下料机械手臂及主要零部件设计自动上下料机械手臂是一种用于工业生产中的自动化设备,主要用于将原材料从储存区域送到生产线上,并将成品从生产线上移出。
它具有快速、精准和高效的特点,可以大大提高生产效率和降低劳动力成本。
在设计自动上下料机械手臂及其主要零部件时,需要考虑以下几个方面:1.机械手臂结构设计:机械手臂应该具有灵活的结构,能够适应不同形状和尺寸的工件。
常见的机械手臂结构包括:伺服电机传动、滑块传动、摆线减速齿轮传动等。
机械手臂的关节数量和布局应根据具体需要进行设计,以保证其灵活性和稳定性。
2.机械手臂控制系统设计:机械手臂的控制系统应该具备高精度的位置控制能力和快速的响应速度。
常用的控制方法包括:PID控制、模糊控制、神经网络控制等。
控制系统应能够实现自动化的上下料操作,并能够适应不同工况下的控制需求。
3.夹具设计:夹具是机械手臂上用于抓取和移动工件的部件。
夹具的设计应该考虑到工件的形状、尺寸和重量等因素,并保证夹持力的稳定性和安全性。
常见的夹具设计包括机械夹具、气动夹具和真空夹具等。
4.传感器设计:传感器是机械手臂上的重要部件,用于检测工件位置、重量和形状等信息。
常见的传感器包括光电传感器、压力传感器和力传感器等。
传感器的选型和布局应根据具体的应用需求进行设计,以提供准确的反馈信息。
5.安全措施设计:机械手臂在工作时可能存在风险,因此需要设计相应的安全措施来保护操作人员和设备的安全。
常见的安全措施包括急停按钮、防撞装置和速度监控系统等。
总之,设计自动上下料机械手臂及主要零部件需要充分考虑机械结构、控制系统、夹具设计、传感器设计和安全措施等方面的要求,以保证机械手臂的可靠性和性能。
同时,根据具体的应用需求,也需要进行相应的优化和改进,以满足不同的生产场景。
送料机械手毕业设计随着科技的不断进步和应用的广泛推广,机械手在工业生产中的应用越来越广泛。
作为一种自动化设备,机械手可以完成各种复杂的操作,提高生产效率,减少人力成本。
而送料机械手作为机械手的一种,具有独特的功能和应用场景,成为了许多企业在生产线上不可或缺的一部分。
送料机械手是一种能够将物料从一个位置移动到另一个位置的机械设备。
它通常由机械臂、夹具和控制系统组成。
机械臂负责抓取和搬运物料,夹具则用于固定物料,控制系统则负责对机械手进行控制和调度。
通过这些组成部分的协作,送料机械手可以在生产线上高效地完成物料的搬运任务。
送料机械手的应用范围非常广泛。
在制造业中,它可以用于将原材料从仓库搬运到生产线上,将成品从生产线上搬运到仓库,或者将半成品从一个工序搬运到另一个工序。
在物流行业中,它可以用于将货物从一个地方搬运到另一个地方,提高物流效率。
在仓储行业中,它可以用于将货物从货架上搬运到物流车辆上,或者将货物从物流车辆上搬运到货架上。
总之,无论是在制造业、物流行业还是仓储行业,送料机械手都发挥着重要的作用。
送料机械手的设计和制造需要考虑多个因素。
首先,需要考虑机械手的负载能力。
根据具体的应用需求,机械手需要能够承载不同重量的物料。
其次,需要考虑机械手的工作范围。
不同的应用场景对机械手的工作范围有不同的要求,设计师需要根据具体情况确定机械手的工作范围。
此外,机械手的速度和精度也是设计时需要考虑的因素。
不同的应用场景对机械手的速度和精度有不同的要求,设计师需要根据具体情况确定机械手的速度和精度。
除了上述因素外,还需要考虑机械手的安全性和可靠性。
机械手在工作过程中需要与人员和其他设备进行协作,因此必须具备良好的安全性能,以避免意外事故的发生。
同时,机械手的可靠性也非常重要,设计师需要确保机械手在长时间运行的情况下不会出现故障,以保证生产线的正常运行。
在现代工业生产中,送料机械手已经成为了不可或缺的一部分。
它的出现极大地提高了生产效率,减少了人力成本,改善了工作环境。
摘要本课题是为普通车床配套设计的上料机械手。
工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
本课题对机械手进行了结构设计和液压传动原理的设计,确定了机械手的机械系统,液压驱动系统,控制系统三个组成部分的设计方案。
介绍了机械手的组成和分类,确定了机械手的主要参数及设计方案;对抓取机构的各零部件的参数进行计算,对液压元件进行选择,确定电机规格及机构的参数;对机身机座的电动机和减速器进行选择,并对螺栓设计和校核,确定其当量应力,剪切强度,弯曲强度;确定了机械手的定位方式为机械挡块定位;对影响机械手定位和稳定性的因素进行了相关分析。
关键词:机械手;抓取机构;液压缸目录摘要 (I)第1章绪论 (4)1.1 课题背景 (4)1.1.1 机器人的历史、现状 (4)1.2 机器人发展趋势 (6)1.3 本文的主要研究内容 (6)第2章方案设计及主要参数的确定 (8)2.1 机械手组成和分类 (8)2.1.1 机械手的组成 (8)2.1.2 机械手分类 (9)2.2 方案设计 (9)2.2.1 主要参数的确定 (9)2.2.2 方案设计 (9)2.3 料槽形式及分析动作要求 (10)2.3.1 料槽形式 (10)2.3.2 动作要求分析 (11)2.4 本章小结 (11)第3章抓取机构的设计 (12)3.1 手部设计计算 (12)3.1.1 对手部设计的要求 (12)3.1.2 拉紧装置原理 (13)3.2 腕部设计计算 (16)3.2.1 计算扭矩 (16)3.2.2 油缸(伸缩)及其配件的估算扭矩 (16)3.2.3 腕部回转液压缸尺寸的确定 (16)3.3 臂伸缩机构设计 (19)3.3.1 计算液压缸活塞驱动力 (19)3.3.2 根据驱动力确定液压缸结构尺寸 (20)3.3.3 腔流量 (20)3.3.4 手臂右腔工作压力 (20)3.4 液压元件的选择 (21)3.4.1 绘制机构工作参数表 (21)3.4.2 由初步计算选液压泵 (21)3.4.3 算腕部摆动缸 (21)3.4.4 确定电机规格 (22)3.4.5 油管尺寸的确定 (22)3.4.6 管道壁厚的计算 (23)3.4.7 油缸容积的确定 (23)3.5 本章小结 (23)第4章液压系统原理设计及草图 (24)4.1 手部抓取缸 (24)4.2 腕部摆动液压回路 (24)4.3 小臂伸缩缸液压回路 (25)4.4 总体系统图 (26)4.4.1 工作过程 (26)4.4.2 电磁铁动作顺序表 (26)4.5 本章小结 (27)第5章机身机座的结构设计 (28)5.1 电机的选择 (28)5.1.1 带动臂部升降的电机 (28)5.1.2 带动机身回转的电机 (28)5.2 减速器的选择 (29)5.3 螺柱的设计与校核 (29)5.4 本章小结 (30)第6章机械手的定位与平稳 (31)6.1 常用的定位方式 (31)6.2 影响平稳性和定位精度的因素 (31)6.3 机械手的控制 (32)6.4 本章小结 (33)结论 (34)参考文献 (35)致谢 (36)第1章绪论1.1课题背景1.1.1机器人的历史、现状机器人首先是从美国开始研制的。
热镦挤送料机械手课程设计热镦挤送料机械手是一种用于热挤压工艺的自动化设备,它能够高效、精确地将热塑性材料送入挤出机中进行挤压加工。
本文将围绕热镦挤送料机械手的课程设计展开讨论。
我们需要了解热镦挤送料机械手的基本原理和工作流程。
热镦挤送料机械手由控制系统、传动系统和操作系统组成。
控制系统负责监控和控制整个设备的运行,传动系统通过运动装置实现送料和挤压操作,操作系统则负责输入指令和监视设备状态。
在课程设计中,我们需要考虑热镦挤送料机械手的关键性能指标,如送料速度、送料精度、挤压力和挤压速度等。
根据具体的工艺要求和材料特性,我们可以确定这些指标的具体数值,并在课程设计中进行模拟和优化。
热镦挤送料机械手的设计还需要考虑安全性和稳定性。
在设备运行过程中,需要防止材料堵塞、过载和故障等情况的发生,同时还需要考虑操作人员的安全。
因此,在课程设计中,我们需要充分考虑这些因素,并设计相应的安全措施和故障诊断系统。
为了提高热镦挤送料机械手的性能,我们可以采用一些先进的技术和方法。
例如,可以使用传感器来实时监测设备的运行状态和材料的流动情况,以便及时调整参数和处理异常。
此外,利用机器学习和人工智能等技术,可以对设备进行智能化优化和自适应控制,从而提高生产效率和产品质量。
在课程设计中,我们还可以考虑热镦挤送料机械手与其他设备的协同工作。
例如,可以将热镦挤送料机械手与挤出机、模具和冷却设备等其他设备进行联动,实现整个生产线的自动化控制和优化。
热镦挤送料机械手的课程设计是一个综合性的工程项目,需要综合考虑机械、电气、控制和材料等多个方面的知识。
通过合理的设计和优化,可以提高热镦挤送料机械手的性能和稳定性,实现高效、精确的热挤压加工。
希望本文对热镦挤送料机械手的课程设计有所帮助,为相关领域的学习和研究提供参考。
中文圆钢送料机械手上下料机械手毕业设计一、设计背景与意义:随着现代工业的快速发展,自动化技术在各个领域得到了广泛应机械手作为自动化生产线的重要组成部分,其在工业生产中具有重要意义。
本次设计的机械手主要应用于中文圆钢送料机上下料作业,通过自动化操作来提高工作效率,降低劳动强度,减少操作错误,提高生产质量。
二、设计原理与流程:1.设计原理:(1)采用机械手抓取圆钢的方式,实现上下料作业;(2)通过光电传感器进行及时感应,确保机械手的精确定位;(3)利用传动装置使机械手能够在三维空间内进行自由移动。
2.设计流程:(1)确定机械手的工作空间,包括上下料区域的尺寸和限制;(2)选择合适的机械手结构和控制系统,确保能够满足作业要求;(3)设计机械手的抓取装置,确定合适的抓取方式和抓取力度;(4)设计传动装置,使机械手能够在三维空间内对准指定位置;(5)设置光电传感器,确保机械手的准确定位;(6)编写控制程序,实现自动化操作。
三、设计目标:(1)实现机械手对中文圆钢的自动上下料作业;(2)提高工作效率,降低劳动强度,减少操作错误,提高生产质量;(3)机械手的工作精度要求达到一定水平,确保圆钢的稳定抓取与放置;(4)机械手的安全性要求高,确保操作人员的人身安全。
四、设计步骤与方法:1.确定机械手的工作空间和限制,根据产线工艺要求确定上下料区域的尺寸和位置。
2.选择适合的机械手结构和控制系统。
常见的机械手结构有串联型、并联型等,根据实际情况选择合适的结构。
3.设计机械手的抓取装置。
根据中文圆钢的形状和重量,确定合适的抓取方式和抓取力度,确保稳定抓取和放置。
4.设计传动装置。
机械手需要实现在三维空间内的自由移动,通过传动装置来实现机械手的运动,如采用电动机和传动带来实现。
5.设置光电传感器。
光电传感器能够及时感应机械手的位置,确保机械手的准确定位。
6.编写控制程序。
通过编写控制程序,实现机械手的自动化操作,并确保其工作稳定和安全。
摘要本次毕业设计的题目是送料机械手的设计,首先对送料机械手的工况进行分析,此多工位专用机械手完成小臂上下俯仰、大臂正反向回转、行走装置进退三个自由度,以及手爪的开启和闭合等动作,然后给出该送料机械手的液压系统的电磁元件动作循序表和液压系统原理图。
本械手由大臂结构,小臂、旋转结构和驱动机构组成,该设计能实现三个自由度,分别为手爪的开合,旋转,小臂的上下摆动以及大臂的旋转等等功能。
关键词:送料机械手;液压系统;自由度;功能AbstractThis graduation project mainly had the CA18 control engine bed and the programming introduction, the ear components tech nological analysis craft parameter choice cutting tool choice, the components procedure manual establishment, the procedure simulation, the modelling and the entity simulation processing finally has made the design summary,the acknowledgment language, the reference tabulation and the appendix.Article primary coverage for components craft analysis.This components manual programming, but also has to make engineer's modelling and the entity simulation ed the circular arc interpolation instruction in the components manual programming; drill hole; M98 transfer subroutine instruction.Key words: auto-focus;Industrial robot ;degrees of freedom ;fucation目录第一章绪论 (1)1.1本课题研究的内容 (1)1.2国内外发展状况 (2)1.3机械手的组成和分类 (4)1.4液压传动的基础知识 (6)第二章送料机械手的设计方案 (8)2.1 送料机械手的总体方案图 (9)2.2 送料机械手的工作原理 (10)第三章送料机械手结构的设计 (11)3.1夹持式手部结构 (12)3.1.1手指的形状和分类 (13)3.1.2设计时考虑的几个问题 (14)3.1.3手部夹紧液压缸的设计 (14)3.2液压缸驱动力矩的计算 (16)3.3液压缸驱动力矩的计算校核 (17)3.4 电机的选型计算 (18)第四章送料机械手中关键零部件的强度计算与校核 (23)4.1齿轮的强度计算与校核 (24)4.2轴的强度计算与校核 (25)第五章送料机械手液压系统的设计 (26)5.1液压系统原理图的确定 (27)5.2电磁元件动作循序表的确定 (28)总结 (29)致谢 (30)参考文献 (31)第一章绪论工业机械手技术和产品强度的可靠性得到了增强,有望应用于教学,免费的产品系统和一些新的领域。
只有我们创建的模式可十分完美地与网络技术结合在一起,才能建立一个满是生机的社会环境,帮助型机械手也才能服务大众的各类活动。
如果多个应用程序可以为我们创造的,他们提供快速,安全的服务,满足他们的需求,将是非常愉快的。
所以,我们应该抓紧实现建设这样一个好的平台。
此外,因为教育是人才的培养,社会和工业的各个领域也要由它来服务。
教育以及教育系统以机械手为目标的不仅得提高应付难处的能力;他们也喜欢传统的技术,在不同的方向、在合作领域,但关键是要把机械手技术对社会和高级人才使用。
对于很多特殊地方,像危险性很大或我们难以到达的,比如拆除炸弹,未知探测等相应领域,对以上危险状况深入探寻通常需要机械手来实现。
微小型步行机械手是机械手的一个重要分支,步行机械手与超过六英尺,八条腿的机械手相比,由于承载能力强,稳定性好,具有结构简单的优点,所以,全球大批研究者,开始普遍重视它。
1)实现的潜力2010年,国家各部委进行详细的调查和论证后认为:智能机械手这个大产业在接下来的几十年内产值和市场占有率都会是井喷式的。
在2013七月,在测量市场大小的根本上行使2010之“机械手产业的市场趋势考查”后续。
情况即中国市场正在急剧膨胀,然后韩国,日本和德国都在拼命瓜分市场。
2)工业机械手的定义和需求在日本,工业机械手从开始普及到现在已然30年。
工业机械手对全球制造业发展提供了很多的帮助,像战胜了困难的,污浊的,无法掌握的应用情况,供应了优秀的产品品质,补充了贫乏的现场人力。
能理解,在将来数年,由于老龄化加剧,现场人力数目缩小,会发生很多的用人贫乏。
因此,产业机械手的希冀变得更多。
产业机械手在全新范畴的施行(像食物,药剂以及消费物的研发,建设以及制造范围)亦然有很好的远景。
特别是在医学范畴,试剂以及样品分析前处理,可能获得类似于高度精准的技术实验数据。
人力也能够防止于在危急境况下作业,如病毒和细菌。
另一面来说,怎么去教依旧是产业机械手的很大问题。
利用口令进行示范,必须锻炼的非常好,方能娴熟的操纵各式各样产业机械手。
在当下的机械手体系里,多臂互相配合链接操纵的境况下,操纵要用去巨额的工夫。
早前的机械手体系愈来愈艰巨,是让教授更易学的一个大难点。
在将来的时间里边,达成不必讲授成了终极的目的。
更由于这样,智能的机械手会成为不可或缺的。
我们需求各式各类的研发成效,联合科研院所的协助。
1.1本课题研究的内容本次设计的题目是送料机械手的设计,本次设计的送料机械手的主要内容为:(1)对多工位专用机械手的工况进行分析。
(2)实现多工位专用机械手完成小臂上下俯仰、大臂正反向回转、行走装置进退三个自由度,以及手爪的开启和闭合等动作要求。
(3)给出液压系统的电磁元件动作循序表和液压系统原理图。
1.2 国内外发展状况在日本,工业机械手从开始普及到现在已然30年。
工业机械手对全球制造业发展提供了很多的帮助,像战胜了困难的,污浊的,无法掌握的应用情况,供应了优秀的产品品质,补充了贫乏的现场人力。
能理解,在将来数年,由于老龄化加剧,现场人力数目缩小,会发生很多的用人贫乏。
因此,产业机械手的希冀变得更多。
产业机械手在全新范畴的施行(像食物,药剂以及消费物的研发,建设以及制造范围)亦然有很好的远景。
特别是在医学范畴,试剂以及样品分析前处理,可能获得类似于高度精准的技术实验数据。
人力也能够防止于在危急境况下作业,如病毒和细菌。
另一面来说,怎么去教依旧是产业机械手的很大问题。
利用口令进行示范,必须锻炼的非常好,方能娴熟的操纵各式各样产业机械手。
在当下的机械手体系里,多臂互相配合链接操纵的境况下,操纵要用去巨额的工夫。
早前的机械手体系愈来愈艰巨,是让教授更易学的一个大难点。
在将来的时间里边,达成不必讲授成了终极的目的。
更由于这样,智能的机械手会成为不可或缺的。
我们需求各式各类的研发成效,联合科研院所的协助。
由于全球都迈进了衰老型社会,想让老弱病残幼在存活和环境容纳中获得援手。
估计机械手会给以充分的反馈,好比讯号的供应以及撑持,帮助那些居家讨生活的人,向组建社团给以帮助,缩小休养之包袱,给身体功能施以帮助,以及增加商业设施。
这会能使得老人以及残疾人觉得就是貌似孩子们、孙子们和他们呆在一块儿似的。
历经实践,这是愈来愈明朗,在以后,服务型机械手的成长会加快环境容纳度,我们会使得延续康健的时期愈来愈长,用自帮自助的存在方法,有目的地工作和参与社会。
所以有,它可以变成构建更好环境以及衰老境况乃至世界上生长的能量。
如果我们必须领会服务机械手体系的运作方法,就得懂得实际情况、顾客还有产品中的悬殊,包括领导大批机械手还给以帮助。
不只是增添了很多额外花费,以及能否赚钱的疑惑。
诚然我们可以建造出来服务机械手体系,若是服务的回报无法回本更无盈利,就更不能扩大利用了。
假如一个多服务系统机械手可以建造出来,可给他人用的崭新的帮助方式已初露锋芒,制造者才敢去想走到了这一步,得到的回报能否顺利地抵消甚至超出用去的本金。
所以,现在极大的障碍是创造出一个体系,这体系会渗透进帮助型机械手的发展范畴,也更容易渗透进IT行业。
在日本,那样的向来肩负着本国对外竞争力的研发科技、生产制造人员却是在急剧锐减,现在,他们加快应对着居民衰老化,真正境况是,依托相应调研报告,眼下的事实却是,日本群众用在高端科技的精力以及会意程度非常明显的愈来愈少了。
即使如此,机械手和机械手应用工程课堂展示教学也收获了重视,是一种很好的锻炼制造员工以及淡化对科学害怕的技术措施。
机械手活动比赛被承办在各式各样的地区,传统刊物也录用了兴趣者们的作品,还有机械手知识亦然在人民里边传播开来。
电机把持,传感器科学和计算机应用,机构零部件和别的技术归纳在一块,是为机械手技术。
于是,途径PBL——源自困难的进修以及同等的要领,激发了察觉麻烦的本领以及处理的技巧,相当顺应思维培养的组合,其也可增强优化多组件科技以及提升归纳体系的优点。
要实现此方针,不妨面向基础教育的同学达成科学培养,使培养方式和手段得以普遍使用,还有方针即是开始于小学和初中止于科技培养部门工程师。
何人最先取得此项专利已无可知晓,只了解到外国科学家在十九世纪末建造出了一部类似于骡马,整体部分是用齿轮以及连接杆件机构组装,人可以骑在上面用脚蹬踏板推动运行的机械手,但是却没有做出实物来加以佐证.20世纪初又有人运用齿轮以及连接杆件体系制造出类似的机械手,然而相关资料中并没有找到对这个作品的介绍,所以那个时候有关机械手的研究还仅能思索腿的组成以及运动起来的行程路径。
20世纪中期Shigley已然放进步态研究的思维制造出来在每一条腿上都用成组的连接杆件体系拼装而且安装两个摇杆体系结构以操纵机械手的步伐轨迹,已然加入步态设计的思路。
同期,又有两位发明家麦吉以及弗兰科创作了首部彻底用计算机操纵的行走机械手。
接下来几年有关此机器的设计被充分的融入了运行操纵理论。
1979年席罗思在行进机械手里加入了操纵水平行走的仪器,同样在腿上加入了保持和校对偏向的装置。
20世纪末布朗、罗布特以及莎普恩斯研究了加入了液压部件和直流电机的相应机械手。
这都意味着人类对四杆动力体系的认识已从简单的考虑迈入了整体操纵、计算机和高新科技的相互融汇贯通的康庄大道。