LK031激光位移传感器设计
- 格式:pdf
- 大小:1.31 MB
- 文档页数:25
激光位移传感器的光学系统设计莫仁芸;朱万彬;钟俊;陈璇【摘要】针对目前国内自主研制的激光位移传感器精度低,测量范围小等问题,提出了一种采用光学设计软件预先仿真整个激光位移传感器光学系统的方法.在分析系统各部分的光学特性的基础上,结合具体要求设计了一个激光位移传感器的光学系统,其工作范围为(50 ±10)mm.采用系统分割的方法,将整个光学系统分为两部分进行设计,第一部分是激光束的整形透镜,要求在有效的工作范围内得到小而均匀的出射光斑,设计结果表明,在测量范围内,光斑大小能够控制在10-1mm量级;另一部分是被测面散射光接收的成像物镜,该系统的特点是物面和像面相对于光轴都有一定的角度,实验结果表明其成像满足Scheimpflug条件.【期刊名称】《中国光学》【年(卷),期】2010(003)005【总页数】5页(P513-517)【关键词】激光位移传感器;激光三角法;整形镜;成像透镜;光学设计【作者】莫仁芸;朱万彬;钟俊;陈璇【作者单位】中国科学院,长春光学精密机械与物理研究所,应用光学国家重点实验室,吉林,长春,130033;中国科学院,研究生院,北京,100039;中国科学院,长春光学精密机械与物理研究所,应用光学国家重点实验室,吉林,长春,130033;中国科学院,长春光学精密机械与物理研究所,应用光学国家重点实验室,吉林,长春,130033;中国科学院,研究生院,北京,100039;长春理工大学,吉林,长春,130022【正文语种】中文【中图分类】TP212.12;TN2491 引言随着现代化工业的发展,激光位移传感器作为高精度、高响应的非接触测量仪器,在光电技术检测领域得到了广泛的应用。
其采用的激光三角法原理在理论上已相当成熟,但在实际应用中还有一定的困难。
由于三角法建立在理想成像的基础之上,所以三角法能否准确实现还要依赖于所采用的光学系统。
现阶段,国外此类的高精度物镜设计处于领先水平,并拥有比较成熟的产品,但其多透镜组合与非球面的加工方式在制造成本上相当昂贵。
激光位移检测系统课程设计一、课程目标知识目标:1. 理解激光位移检测系统的基本原理,掌握其工作流程和关键部件功能。
2. 学习相关的物理知识,如光的传播、反射、干涉等,并将其应用于激光位移检测。
3. 掌握数据处理与分析方法,能对激光位移检测系统的输出数据进行有效解析。
技能目标:1. 能够操作激光位移检测设备,进行简单的实验设置和数据采集。
2. 培养动手实践能力,通过小组合作完成激光位移检测系统的组装与调试。
3. 提高问题解决能力,能够运用所学知识分析和解决实际应用中的问题。
情感态度价值观目标:1. 培养学生对物理学科的兴趣,激发他们探索科学技术的热情。
2. 培养学生的团队合作意识,学会在小组中分享观点、协同解决问题。
3. 增强学生的环境保护意识,认识到激光位移检测技术在生产生活中的重要应用和价值。
分析课程性质、学生特点和教学要求:本课程为高二年级物理选修课程,结合学生已掌握的光学知识,通过激光位移检测系统课程设计,使学生在实际操作中巩固理论知识,提高实践能力。
课程注重培养学生的动手操作能力、问题解决能力和团队协作能力,旨在激发学生对物理科学的兴趣,培养他们的创新精神。
课程目标分解:1. 知识目标:通过讲解、演示和实验,使学生掌握激光位移检测系统的基本原理和操作方法。
2. 技能目标:通过实验操作、小组合作和问题分析,培养学生的动手实践能力和问题解决能力。
3. 情感态度价值观目标:通过课程实施,引导学生体验科学探究的乐趣,培养他们的团队合作精神和环保意识。
二、教学内容1. 激光位移检测系统基本原理- 光的传播、反射、干涉等现象- 激光特性及其在位移检测中的应用- 激光位移传感器的工作原理2. 激光位移检测系统的组成与功能- 激光发射器、接收器、光束调节器等关键部件- 系统的组装与调试方法- 各部件在位移检测中的作用及相互关系3. 实验操作与数据处理- 实验设备的使用方法与注意事项- 实验步骤及操作技巧- 数据采集、处理与分析方法4. 激光位移检测技术的应用案例- 工业生产中的质量控制与自动化- 建筑物、桥梁等结构物的健康监测- 航空航天、生物医学等领域的应用5. 教学内容的安排与进度- 第一节课:激光位移检测系统基本原理与激光特性- 第二节课:激光位移检测系统的组成与功能- 第三节课:实验操作与数据处理- 第四节课:激光位移检测技术的应用案例及讨论教学内容依据课程目标,结合教材相关章节,系统性地组织与安排。

激光位移传感器测量原理
激光位移传感器是一种新型的安全性监测系统,它能够帮助管理者实时监测机器的操作情况和安全状态。
激光位移传感器的核心元件就是激光器。
它被安装在探测器外,探测器将激光定向发射到指定的机器工作表面上。
激光器发出的激光会反射到探测器上,当探测到机器上物体发生位移时,反射激光会发生变化,探测到的位移值就通过激光反射器传递给探测器。
激光探测器能够反映出物体表面的位移,但是不能准确测量本身的尺寸。
为了得到准确的尺寸,就需要将探测器与激光源的距离作为参考,结合激光的反射角度和激光的衰减程度来计算出位移值。
这个计算公式就是激光位移传感器计算物体尺寸的核心。
激光位移传感器有以下几个主要特点:
(1)灵敏度高:反应能力强,提供了精确的位移信号。
(2)精度高:可以根据实际需要提供准确的位移数据,不受其他因素的影响。
(3)响应速度快:可以通过控制参数来提高响应速度,适用于各种快速变化的环境中。
(4)工作稳定性好:只要安装准确,系统的稳定性即可保证,可以实现长时间无故障运行。
(5)安装容易:可以根据使用场合易于安装,独立使用时无需多余的连接线。
激光位移传感器在安全性监测与控制方面发挥着重要作用,是机器安全监测的工具,具有高精度,安装简单,反应速度快的特点,深受工程师和使用者喜爱。
随着21 世纪的到来,人们开始进入了以知识经济为特征的信息时代, 微电子技术、计算机技术、通讯网络技术及自动化技术高速发展的同时, 作为工业自动化技术工具的自动化仪表及装置也向数字化、智能化、网络化发展。
传感器技术、计算机技术和通讯技术一起构成了现代信息的三大基石。
而非接触检测可以克服接触式检测的不足,对于各种测量目标都可以提供高灵敏度、高精度、高效率的数据采集,从而实现对被测物各种参数的非接触测量。
它不会造成被测表面的划伤和损坏,对各种材料制成的工件皆可实现测量。
非接触检测的最大优点是在被检测物体加工过程中便可实现测量。
非接触检测的最大优点是在被测物体加工过程中便可对其进行测量,即在线实时检测,从而实现对加工过程的控制,降低废品率,可大大节省检测时间,提高生产效率,这是接触式检测方式所无法比拟的。
目前,非接触检测主要以激光检测和红外探测为为代表,而激光检测技术是最先进应用最广泛的检测技术之一。
可实现高精度、高效率、非接触在线检测。
对于解决国防及民用工业生产中的产品零件检测难题起到了及其重要的作用。
传感器是利用某种转换原理, 将物理的、化学的、生物的等外界信号变成可以直接测量的电信号的装置。
在实现生产自动化的过程中,采用适当的传感器(能满足系统要求的长期稳定性、可靠性、精确度等性能指标) 是十分重要的。
传感器是现代检测与控制系统中必不可少的组成部分,它的好坏直接关系到整个系统的成败。
在传感器测量技术中, 越来越广泛地运用了超声、微波、激光等声、光、电技术来解决不同工业领域中遇到的特殊测量问题和提高性能的要求。
激光器作为一种新型光源, 与普通光源有显著的不同。
他利用受激发射原理和激光腔的滤波效应,使所发光波具有一系列新的特点。
激光检测技术是最先进应用最广泛的检测技术之一。
可实现高精度、高效率、非接触在线检测。
2 激光位移传感器的测量原理激光位移传感器是一种非接触式的精密激光测量系统, 它具有适应性强、速度快、精度高等特点,适用于检测各种回转体、箱体零件的尺寸和形位误差。

激光位移检测课程设计一、课程目标知识目标:1. 让学生理解激光位移检测的基本原理,掌握影响激光位移检测精度的因素;2. 使学生掌握激光位移传感器的构造、工作原理及其在工程领域的应用;3. 帮助学生了解激光位移检测技术在现代科技发展中的地位和作用。
技能目标:1. 培养学生运用激光位移传感器进行实际测量的操作技能,提高实际操作能力;2. 培养学生分析和解决激光位移检测过程中出现问题的能力;3. 培养学生通过查阅资料、开展小组讨论等方式,自主探究激光位移检测技术的新进展。
情感态度价值观目标:1. 激发学生对激光位移检测技术的学习兴趣,培养其积极探索、勇于实践的精神;2. 培养学生具备良好的团队合作意识,提高沟通协调能力;3. 增强学生对我国激光位移检测技术发展的自豪感,激发其为国家科技创新贡献力量的意愿。
课程性质分析:本课程为应用物理学科,结合实际工程应用,强调理论与实践相结合,注重培养学生的实际操作能力和创新意识。
学生特点分析:学生处于高年级阶段,具备一定的物理基础知识,具有较强的学习能力和动手能力,但对激光位移检测技术的了解有限。
教学要求:结合学生特点,采用启发式教学,引导学生主动探究,注重理论与实践相结合,提高学生的综合运用能力。
通过本课程的学习,使学生在知识、技能和情感态度价值观方面均取得具体的学习成果,为后续相关课程的学习和实际应用打下坚实基础。
二、教学内容1. 激光位移检测基本原理:包括激光的传播特性、反射原理以及激光位移传感器的工作原理;教材章节:第三章“光电子技术”第2节“激光原理与应用”。
2. 激光位移传感器结构与性能:介绍不同类型的激光位移传感器结构、性能指标及其在工程中的应用;教材章节:第四章“传感器技术”第1节“传感器概述”及第3节“光传感器”。
3. 影响激光位移检测精度的因素:分析环境、设备、操作等方面对激光位移检测精度的影响;教材章节:第四章“传感器技术”第4节“传感器性能分析”。
激光位移传感器技术指标嘿,朋友们!今天咱来聊聊激光位移传感器那些事儿。
你说这激光位移传感器啊,就像是我们生活中的一个小魔术棒。
它能超级精确地测量物体的位移,那精度,简直了!就好比你要量一个小芝麻的移动,它都能给你分得清清楚楚。
咱先说说它的测量范围吧。
这就好像是你跑步的赛道,有长有短。
不同的激光位移传感器,它能测量的距离可不一样。
有的能测个几米远,有的那可是能“看”到好几十米开外呢!你想想,这要是在大工程里,能发挥多大作用呀!还有那分辨率,可别小瞧了这一点。
它就像是你手机屏幕的清晰度,分辨率越高,看到的细节就越多。
激光位移传感器的分辨率高了,那测量出来的结果就更准确,误差就更小啦。
你说要是分辨率不行,那不就跟戴了个模糊的眼镜一样,啥都看不清嘛!响应时间也很重要哦!这就跟你反应速度似的。
如果响应时间太长,等它测出来,黄花菜都凉了。
但是好的激光位移传感器,那响应速度,快得让你惊讶!再说说线性度吧,这就好像是一条直直的路。
如果线性度不好,那这条路就弯弯曲曲的,测量结果不就乱七八糟啦?咱可不能要这样的呀!那稳定性呢,就像是一个可靠的朋友。
它得一直稳稳当当的,不能今天测的准,明天就不行了。
这要是不稳定,那多让人头疼呀!哎呀,你说这激光位移传感器是不是很神奇?它在好多领域都大显身手呢!像工业生产啦,科研啦,到处都有它的身影。
咱就说在工业生产里,它能精准地测量零件的尺寸,保证产品的质量。
这就好比是一个严格的质检员,不放过任何一个小瑕疵。
在科研中呢,它能帮助科学家们获得更准确的数据,推动科技的进步。
这不就是给科研加了一把力嘛!你说这么厉害的东西,咱能不好好了解了解吗?咱得知道怎么挑,怎么用,才能让它发挥最大的作用呀!所以啊,大家可别小瞧了这小小的激光位移传感器,它背后的学问可大着呢!它就是那个默默工作,却能带来巨大贡献的小能手。
怎么样,是不是对激光位移传感器有了更深的认识啦?。
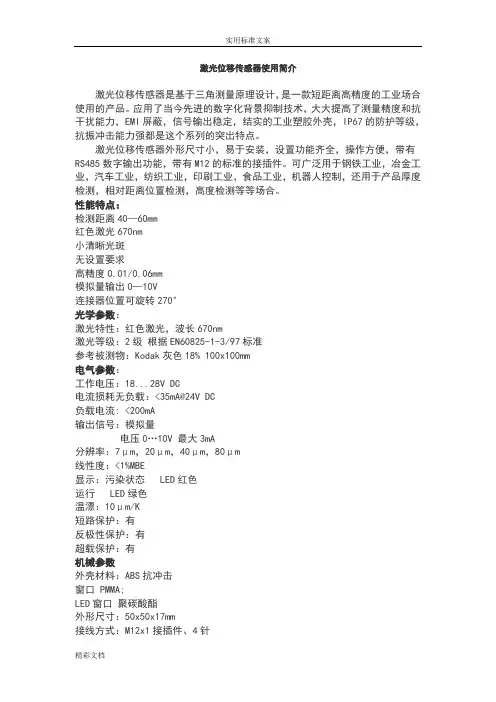
激光位移传感器使用简介激光位移传感器是基于三角测量原理设计,是一款短距离高精度的工业场合使用的产品。
应用了当今先进的数字化背景抑制技术,大大提高了测量精度和抗干扰能力,EMI屏蔽,信号输出稳定,结实的工业塑胶外壳,IP67的防护等级,抗振冲击能力强都是这个系列的突出特点。
激光位移传感器外形尺寸小,易于安装,设置功能齐全,操作方便,带有RS485数字输出功能,带有M12的标准的接插件。
可广泛用于钢铁工业,冶金工业,汽车工业,纺织工业,印刷工业,食品工业,机器人控制,还用于产品厚度检测,相对距离位置检测,高度检测等等场合。
性能特点:检测距离40—60mm红色激光670nm小清晰光斑无设置要求高精度0.01/0.06mm模拟量输出0—10V连接器位置可旋转270°光学参数:激光特性:红色激光,波长670nm激光等级:2级根据EN60825-1-3/97标准参考被测物:Kodak灰色18% 100x100mm电气参数:工作电压:18...28V DC电流损耗无负载:<35mA@24V DC负载电流: <200mA输出信号:模拟量电压0…10V 最大3mA分辨率:7μm,20μm,40μm,80μm线性度:<1%MBE显示:污染状态 LED红色运行 LED绿色温漂:10μm/K短路保护:有反极性保护:有超载保护:有机械参数外壳材料:ABS抗冲击窗口 PMMA;LED窗口聚碳酸酯外形尺寸:50x50x17mm接线方式:M12x1接插件、4针使用寿命:50000小时产品重量:40g配件:可选保护壳低温工作加热器高温环境降温配件环境参数环境光源:EN60947-5-2 EMC: EN60947-5-2工作温度:0...50℃保存温度:-10...60℃保护等级:IP67。
激光测距传感器课程设计一、课程目标知识目标:1. 学生能理解激光测距传感器的工作原理,掌握其基本构成和功能。
2. 学生能掌握激光测距传感器在工程和日常生活中的应用,了解其重要性。
3. 学生能了解激光测距传感器与其他类型传感器的区别和联系。
技能目标:1. 学生能通过实验操作,学会使用激光测距传感器进行距离测量,并掌握数据处理方法。
2. 学生能运用已学知识,分析并解决实际测量中遇到的问题,提高解决问题的能力。
情感态度价值观目标:1. 学生培养对物理学科的兴趣,增强对科学技术的热爱和探究欲望。
2. 学生通过学习激光测距传感器,培养团队合作精神,增强实践操作能力。
3. 学生认识到激光测距传感器在国家安全、环境保护等方面的作用,树立正确的价值观。
课程性质:本课程为物理学科选修课程,注重理论与实践相结合,提高学生的实际操作能力。
学生特点:学生为九年级学生,具备一定的物理知识和实验技能,对新鲜事物充满好奇心。
教学要求:教师需通过生动的教学方式,引导学生掌握激光测距传感器的相关知识,注重培养学生的动手能力和实际问题解决能力。
在教学过程中,关注学生的情感态度价值观的培养,提高学生的综合素质。
通过对课程目标的分解,确保学生能够达到预期的学习成果,为后续教学设计和评估提供依据。
二、教学内容1. 激光测距传感器原理:- 理解激光产生、传播和接收的基本过程。
- 掌握测距原理,包括时间飞行法、相位法和干涉法等。
2. 激光测距传感器结构:- 了解传感器的组成部分,包括激光发射器、接收器、信号处理单元等。
- 学习不同类型激光测距传感器的结构特点和应用场景。
3. 激光测距传感器应用:- 探讨在工业、医疗、交通、航空航天等领域的应用案例。
- 分析激光测距传感器在日常生活和国防科技中的重要性。
4. 实践操作与数据处理:- 安排实验课,让学生亲自操作激光测距传感器进行距离测量。
- 学习数据处理方法,包括数据校正、误差分析等。
5. 教学大纲:- 第一课时:激光测距传感器原理及分类。
综合性实验报告实验课程:传感器与检测技术实验名称:位移检测传感器的应用姓名:学号:班级:指导教师:实验日期: 2013年12月17日位移检测传感器应用一、实验类型位移检测综合性实验二、实验目的和要求1.了解微位移、小位移、大位移的检测方法。
2.运用所学过的相关传感器设计三种位移检测系统。
3.对检测系统进行补偿和标定。
三、实验条件本实验在没有加速度、振动、冲击(除非这些参数本身就是被测物理量)及环境温度一般为室温(20±5℃)、相对湿度不大于85% ,大气压力为101±7kPa 的情况下进行。
四、实验方案设计为了满足实验要求,现使用电涡流,光纤,和差动三种传感器设计位移检测系统,电涡流取0.1mm为单位,光纤取0.5mm为单位,差动取0.2mm为单位。
进行试验后,用MATLAB处理数据,分析结论。
(一):电涡流传感器测位移实验原理:通过高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量。
(二):光纤传感器测位移实验原理:反射式光纤位移传感器是一种传输型光纤传感器。
其原理如图36-1所示:光纤采用Y型结构,两束光纤一端合并在一起组成光纤探头,另一端分为两支,分别作为光源光纤和接收光纤。
光从光源耦合到光源光纤,通过光纤传输,射向反射面,再被反射到接收光纤,最后由光电转换器接收,转换器接收到的光源与反射体表面的性质及反射体到光纤探头距离有关。
当反射表面位置确定后,接收到的反射光光强随光纤探头到反射体的距离的变化而变化。
显然,当光纤探头紧贴反射面时,接收器接收到的光强为零。
随着光纤探头离反射面距离的增加,接收到的光强逐渐增加,到达最大值点后又随两者的距离增加而减小。
反射式光纤位移传感器是一种非接触式测量,具有探头小,响应速度快,测量线性化(在小位移范围内)等优点,可在小位移范围内进行高速位移检测。
(三):差动电感式传感器测位移实验原理:差动动螺管式电感传感器由电感线圈的二个次级线圈反相串接而成,工作在自感基础上,由于衔铁在线圈中位置的变化使二个线圈的电感量发生变化,包括两个线圈在内组成的电桥电路的输出电压信号因而发生相应变化。
激光位移传感器的光学系统设计探讨作者:李楠于仪鲍建秋来源:《世界家苑》2018年第01期摘要:本文首先简要分析了激光三角法的基本光路,分别从整形镜设计、成像透镜设计两方面,探讨了光学系统设计的具体思路,望能为此领域设计研究有所借鉴。
关键词:激光位移传感器;整形镜;成像透镜激光位移传感器是一种非接触测量仪器,具有高响应、高精度等优点,随着现代工业的不断发展与完善,其在光电技术检测领域呈现出日渐宽泛的应用势头。
现今,光电技术检测所运用的激光三角法原理,已有比较成熟的理论体系,但在现实运用中,仍存在困难与不足。
本文以简单实用为着眼点,用CODE V光学设计软件,来对激光三角法开展光路模拟与设计优化,进而构建一套成像特性优质的光学系统,推动传感器产品化生产。
1.激光三角法的光路分析针对激光位移传感器来讲,其依据入射光角度的差异性,可划分为两种,即斜入射式与直入射式,本设计选用直入射式,图1为光路结构。
整套光路由两部分组成,其一为整形系统,其二为接收系统。
对于左边部分而言,其实际就是光束整形系统,主要作用就是汇聚激光器所发出的光束,使之均处于工作范围内,使所汇聚的光斑尽可能小且均匀。
半导体激光器(LD)为其光源,其通过整形系统,于(50±10)mm的测量范围内,能够形成比较均匀的光斑。
后面为光束接收系统,其能够在光敏探测器上,汇聚物体表面的漫反射光,精确成像。
在图1中,α是成像透镜光轴与被测面所形成的夹角,β是光轴与光敏探测器所形成的夹角,di 代表的是像距,do代表的是物距。
2.光学设计2.1整形镜设计针对激光位移传感器来讲,所测物体表面特征会对其测量精度造成影响,为了能最大程度的减少测量误差,在实际整形镜设计过程中,需尽可能让出射光斑在有效测量范围内,实现光斑的均匀与小。
在设计传感头时,对其小型化方面的要求,半导体激光器重量轻及体积小的优势正好与此要求相符,但却有着并不佳的光束质量,须做光束整形处理。
激光位移传感器的研究与应用摘要激光位移传感器,凭借其高精度测量与非接触操作的独特优势,在工业自动化及科学研究的广阔舞台占据了举足轻重的地位。
本研究深入剖析了激光位移传感器的工作原理、关键技术要素,及其在多领域应用的实例,并对该传感器的性能进行了全面审视与优化探索。
研究证实,该技术能够精准检测细微位移变化,为工业生产线的质量监控、物料精确定位,以及科研中微观形变的精密测量等提供了坚实的数据保障。
在技术升级的努力下,通过激光源的改良、光学系统优化及信号处理技术的增强,传感器的精确度与稳定性均实现了显著提升。
此外,激光位移传感器在智能机器人、交通监控等新兴应用领域的潜力逐渐显现,预示着其应用范围的不断拓展。
随着技术创新步伐的加快,激光位移传感器无疑将在更多领域绽放光彩,为相关行业的发展注入强劲动力。
关键词:激光位移传感器;高精度测量;非接触式测量;工业自动化;科研实验;性能优化;新兴领域应用目录摘要 (1)第一章引言 (3)1.1 激光位移传感器的研究背景 (3)1.2 激光位移传感器的应用意义 (4)1.3 当前研究现状及研究方法 (5)第二章激光位移传感器原理与技术 (7)2.1 激光测距原理 (7)2.2 关键技术分析 (8)2.3 传感器特点 (9)第三章激光位移传感器的应用实例 (11)3.1 工业自动化领域的应用 (11)3.2 科研实验领域的应用 (12)3.3 其他领域的应用 (12)第四章激光位移传感器的性能评估与优化 (14)4.1 性能评估指标 (14)4.2 性能优化方法 (14)第五章激光位移传感器市场前景与挑战 (16)5.1 市场前景分析 (16)5.2 行业挑战与机遇 (16)第六章结论与展望 (18)6.1 研究结论 (18)6.2 未来研究方向与展望 (18)第一章引言1.1 激光位移传感器的研究背景激光位移传感器,凭借其高精度和非接触式的测量特性,近年来在工业界和科研领域均受到了广泛的关注和应用。
激光位移传感器原理
激光位移传感器是一种利用激光技术测量目标位置的传感器。
其原理基于光学测量原理,通过测量激光光束与目标物体的相互作用来确定目标物体的位置。
激光位移传感器通常由激光发射器、光学元件、探测器和信号处理部分组成。
激光发射器发射一束窄且稳定的激光束,光学元件使激光束聚焦成一个光斑,然后照射到目标物体上。
探测器接收光斑反射回来的光信号,并将其转换为电信号。
信号处理部分对接收到的电信号进行处理和解析,计算出目标物体的位移。
在测量过程中,激光束照射到目标物体上后,一部分光被吸收,而另一部分光被反射回来。
探测器接收到的反射光信号的强度与目标物体的位置息息相关。
通常采用衰减法或相位差法来测量光的强度变化。
在衰减法中,通过比较反射光信号的强度与初始激光光束的强度之间的差异,可以确定目标物体的位移。
当目标物体接近或远离传感器时,反射光信号的强度会发生变化,从而可以计算出位移。
在相位差法中,激光传感器在发射激光时会记录下激光的相位信息。
当激光光束与目标物体相互作用时,反射光的相位会发生改变。
通过测量反射光与初始激光光束的相位差,可以计算出目标物体的位移。
激光位移传感器具有高精度、高稳定性和非接触式测量等优点,广泛应用于精密仪器、自动化设备和工业生产线等领域。
哈尔滨工业大学工学硕士学位论文摘要滚动轴承在工业领域有非常广泛的应用,随着工业现代化的发展和国防工业的振兴,滚动轴承的精度要求也越来越高。
轴承球是滚动轴承的关键零件之一,为了提高轴承生产中轴承球尺寸检测的精度,本文在总结国内外轴承球直径测量技术的基础上,研制了基于激光位移传感器测量的全自动直径测量与分级设备。
该设备采用了精密激光位移传感器、精密电控转台和精密手动调整台等光学部件,并设计了机械本体结构,以及完成控制器的与机械部分的集成等,实现了非接触高精密测量及分组。
在研究现有轴承轴承球的尺寸检测方法的基础上,确定以标准球与待测球直径的相对误差作为轴承球检测和分组的依据。
对轴承球直径测量方法进行了分类分析,研究了误差来源和方法误差的存在形式。
最终确定采用激光三角位移测量法对轴承球进行直径相对测量,并以测量结果作为轴承球分组依据。
设计了三种轴承球直径检测及分组装置方案,包括运动测量和静止测量,基于V型槽轨道的测量和基于球窝的固定测量,并分别进行了三维建模和分析了各个方案的优缺点,最终确定了二自由度旋转臂上料机构和电控转台定位及自动分组机构的总体方案。
该方案结构紧凑,精度较高,测量和分组过程无需手动操作,从而避免了人为误差。
同时,机械系统采用了可更换零部件和可调整结构,能适用于检测3.5mm-25mm范围的轴承球和对轴承球的分组。
通过整体系统的控制方案的分析,确定以工业控制计算机作为控制主机,并集成四轴步进电机运动控制卡和智能型激光位移传感器,组成了控制系统。
联机调试表明该系统能够自动完成一批轴承球的尺寸检测和分组工作,检测的重复精度可以达到0.5μm,达到了课题的设计要求。
关键词:陶瓷球;测量;直径;误差;分组哈尔滨工业大学工学硕士学位论文AbstractWith the development of industrial modernization and the prosperity of defense industrys, ball bearing is widely used in the industrial circle and the precision of ball bearing is under a higher requirement. Rolling ball is one of the most crucial components of ball bearing. In order to promote the precision of testing rolling ball during the production process, in this essay, based on measuringtechnique on diameter of rolling element both at home and abroad, the device which can measure the diameter and classify automatically has been developed based on the measurement of LDS. During the research, with the application of precision laser displacement sensor, precision electronic control turntable and precision manual adjustment Taiwan, which has been designed, was mechanical body structure and the integration of complete controller and machine. Consequently, on-contact high precision measurement and classification can be realized. Specific studies in this essay are as follows:The relative error of diameter measurement was defined as the foundation of rolling test and grouping through the recent ball bearings detection. It has been developed that three diameter detections and grouping device programs for the rolling ball. Then final decision was to consider the2 degrees of freedom arm of the feeding mechanism and Turntable positioning with automatic electric control group institutions as the overall program after the three-dimensional analysis of every program has been given. As a result, the program which has been proved to be compact, more precious and needless to operate manually, avoid personal error. Meanwhile, it can be used to detect and classify the rolling ball ranging from 3.5mm to 25mm owing to its removable components and adjustable structure.By analyzing the integrative controlling program, the industrial control computer was used as the host controlling computer. Additionally, the four-axis stepper motor motion control card and intelligent laser displacement sensor was integrated. Finally the measuring and control system is assembled.It is no longer impossible to have a better understanding of the size error due to the detailed introduction and reasonable classification which have been done.The final online debugging showed that the system can complete a serious of detections of rolling elements and classify them automatically with a sub-micron level precision.Keywords: Ceramic balls ; measurements ; diametre ; errors ; grouping哈尔滨工业大学工学硕士学位论文目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题的研究目的和意义 (1)1.2 国内外研究现状 (3)1.2.1轴承球检测技术的现状 (3)1.2.2轴承球分组技术的现状 (4)1.3 本课题主要研究的内容 (5)第2章轴承球尺寸检测方案及误差分析 (6)2.1 引言 (6)2.2 轴承球直径检测的主要依据 (6)2.3轴承球直径检测的方法 (6)2.3.1 垂直入射式测量法 (8)2.3.2 斜入射式测量法 (9)2.4 误差分析 (10)2.5 本章小结 (15)第3章机械系统设计 (16)3.1 引言 (16)3.2机械系统的总体要求 (16)3.3轴承球测量方案的设计 (17)3.4机械系统的方案分析 (19)3.5本章小结 (27)第4章控制系统设计 (28)4.1 引言 (28)4.2 总体控制原理及控制器选择 (29)4.3 驱动部分设计 (31)4.4 软件实现 (35)4.5本章小结 (37)结论 (38)参考文献 (39)哈尔滨工业大学硕士学位论文原创性声明 (42)哈尔滨工业大学硕士学位论文使用授权书 (42)致谢 (43)哈尔滨工业大学工学硕士学位论文第1章绪论装备制造业是工业化的核心和基础,也是一个国家综合国力强大与否的重要标志之一,而一个国家装备工业的发达程度又直接关系到国家工业和科技的发达水平,因此装备制造业对于一个国家现代化的发展非常重要。
课程设计(报告)题目:LK-031激光位移传感器数据采集系统设计学院:专业班级:指导教师:职称:学生姓名:学号:摘要利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量。
激光位移传感器(磁致伸缩位移传感器)就是利用激光的这些优点制成的新型测量仪表,它的出现,使位移测量的精度、可靠性得到极大的提高,也为非接触位移测量提供了有效的测量方法。
激光位移传感器因其较高的测量精度和非接触测量特性,广泛应用于高校和研究机构、汽车工业、机械制造工业、航空与军事工业、冶金和材料工业的需要精密测量检测的行业。
激光位移传感器是可以精确进行非接触位置、位移测量的精密传感器,主要应用于位置、位移、厚度、振动、距离等几何量的工业测量。
按照测量原理,激光位移传感器原理分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量。
本文对LK-031激光位移传感器数据采集系统进行了设计,该系统是利用CCD激光位移传感器来的两物体的微小形变量,再利用AD7705芯片进行A/D转换和用AT89C51作为处理器,最后用LED显示出测量的位移值。
该测量系统量程为-5mm~+5mm,精度为1μm。
该测量装置显示清晰明了,反应快,灵敏度高,性能稳定,结构简单且设计廉价,可以得到广泛的推广和使用。
关键词:位移传感器,AD7705,AT89C51,LED显示目录第1章绪论 (1)第2章系统总体方案设计 (3)2.1系统技术指标 (3)2.2系统电路框图 (3)2.3数据采集与处理方案 (3)第3章系统硬件设计 (4)3.1A/D电路选择 (4)3.1.1AD7705引脚说明 (4)3.1.2AD7705内部转换原理 (5)3.1.3AD7705的数字接口 (6)3.1.4AD7705的接口电路 (7)3.2单片机的选择 (8)3.2.1AT89C51主要特性 (8)3.2.2管脚说明 (9)3.3AD7705与AT89C51接口电路 (11)3.4放大电路的设计 (11)3.5调整电路与滤波电路设计 (12)3.6显示电路设计 (13)第4章系统软件设计 (18)第5章电路原理图 (19)总结 (20)致谢 (21)参考文献 (22)第1章绪论激光测距技术按照测程可以分为绝对距离测量法和微位移测量法;按照测距方法细分,绝对距离测距法主要有脉冲式激光测距和相位式激光测距,微位移测量法主要有三角法激光测距和干涉法激光测距。
脉冲激光测距的原理是:由脉冲激光器发出一持续时间极短的脉冲激光(主波),经过待测距离L后射到被测目标,有一部分能量会被反射回来,被反射回来的脉冲激光称为回波,回波返回测距仪,由光电探测器接收。
根据主波信号和回波信号之间的间隔。
即激光脉冲从激光器到被测目标之间的往返时间t,就可以算出待测目标的距离。
D=1/2ct式中c为光速,脉冲法精度一般在米量级。
例如,光速约为3108m/s,要想使分辨率达到1mm,则测距传感器的电子电路必须能分辨出以下极短的时间:0.001m(3108m/s)=3ps要分辨出3ps的时间,这是对电子技术提出的过高要求,实现起来造价太高。
但是如今廉价的激光传感器巧妙地避开了这一障碍,利用一种简单的统计学原理,即平均法则实现了1mm的分辨率,并且能保证响应速度。
相位激光测距的原理是:对发射的激光进行光强调制,利用激光空间传播时调制信号的相位变化量。
根据调制波的波长,计算出该相位延迟所代表的距离。
即用相位延迟测量的间接方法代替直接测量激光往返所需的时间,实现距离的测量,这种方法精度可达到毫米级。
三角法激光测距是由激光器发出的光线,经过会聚透镜聚焦后入射到被测物体表面上,接收透镜接收来自入射光点处的散射光,并将其成像在光电位置探测器敏感面上。
当物体移动时,通过光点在成像面上的位移来计算出物体移动的相对距离。
在80年代末90年代初,人们开始激光与三角测量的原理相结合,形成了激光三角测距器。
它的优点是分辨率很高,精度高,可以达到微米数量级,不受被测物的材料、质地、型状、反射率的限制。
从白色到黑色,从金属到陶瓷、塑料都可以测量。
激光三角法位移测量的原理是,用一束激光以某一角度聚焦在被测物体表面,然后从另一角度对物体表面上的激光光斑进行成像,物体表面激光照射点的位置高度不同,所接受散射或反射光线的角度也不同,用CCD光电探测器测出光斑像的位置,就可以计算出主光线的角度,从而计算出物体表面激光照射点的位置高度。
当物体沿激光线方向发生移动时,测量结果就将发生改变,从而实现用激光测量物体的位移。
图1-1激光三角法工作原理示意图第2章系统总体方案设计2.1系统技术指标本次设计为LK-031激光位移传感器数据采集系统设计,其测量范围是±5mm ,输出电压是±5V ,设计一个位移采集与显示系统,要求系统位移分辨小于1μm ,位移用数码管显示,系统具有任意位置置零功能。
2.2系统电路框图2.3数据采集与处理方案当CCD 位移传感器反馈一个电压信号,由于位移传感器反馈的是物体的位移形变,而位移形变可以会发生形变陡然增大或减小,使反馈的电话信号突然变化,再加上外界环境的影响,可能会时反馈的电压信号不在-5V ~+5V 这个范围内变化,调整电路和滤波电路对信号进行限幅处理,限幅范围为-5V —+5V 。
而放大电路把-5V ~+5V 范围的电压信号转换成0~10V 范围的电压信号,位移传感器的-5V 转换后对应的0V ,+5V 对应+10V 。
A/D 转换器和单片机接受电压信号后,经过处理并输出显示在LED 屏幕上。
图2-1 系统电路框图第3章系统硬件设计3.1 A/D电路选择CCD传感器是激光位移传感器是LK-031型,它测量不受颜色,表面材料或漫射光照的影响,量程为-5mm-+5mm,输出电压为-5V-+5V,单位为1μm,分辨率可达0.1%,测量距离为30mm。
=0.61μm14位A/D分辨率:10216位A/D分辨率:10=0.15μm216从上面计算可以看出,16位A/D分辨率符合设计要求,所以应当选择16位A/D 转换器,那么A/D转换选择AD7705,AD7705芯片既可接受从传感器送来的低电平输入信号,也可接受高电平(10V)信号,它运用Σ—△技术实现16位无误码性能,它的输出速度同样可由指令设定,范围由20HZ—500HZ,它能够通过指令设定对零点和满程进行校正,AD7705与微处理器的数据传送通过串行方式进行,采用了节省端口线的通讯方式,最少只占用控制机的两条端口线。
3.1.1AD7705引脚说明图3-1 AD7705引脚图AD7705的引脚排列如图3-1。
如图3-1所示,芯片的脚功能为:SCLK:串行时钟输入。
MCLKIN:系统时钟输入。
MCLKOUT:系统时钟输出。
CS:片选信号。
RESET:复位信号。
AIN2(+):通道2正模拟信号输入。
AIN1(+):通道1正模拟信号输入。
AIN1(-):通道1负模拟信号输入。
REF IN(+):正参考输入电压。
REF IN(-):负参考输入电压。
AIN2(-):通道2负模拟信号输入。
DRDY:数据输出标志位,低输出数据,结束恢复高。
DOUT:从输出移位寄存器串行输出数据位。
VDD:电压输入端,电压范围+2.7V—+5.25V。
GND:地电位。
3.1.2 AD7705内部转换原理AD7705内部原理框图如图3-2所示。
图3-2 AD7705内部转换原理图Σ-△型ADC的电路结构的核心是由Σ-△调制器和数字滤波器组成,Σ-△调制器是由积分器、比较器、1位DA转换器等组成的简单的模拟电路,原理上近似于积分型,将输入电压转换成时间(脉冲宽度)信号,用数字滤波器处理后得到数字值。
AD7705有两个可编程的模拟输入通道,既可以输入单极性,也可以输入双极性信号,双极性信号应该可以从通道的负端AIN(-)输入。
芯片可以工作于缓冲或废缓冲模式,在非缓冲模式下,模拟电压的输入范围可取GND (-30mV )和VDD (+30mV )之间的任意绝对值,在缓冲模式下,模拟输入通道可以处理更高的阻抗源,但是输入电压的范围限制在GND (+50mV )和VDD (-1.5V )之间。
AD7705的可编程增益前端,使它可以直接接收传感器或变频器所得的微弱信号。
Σ-△ADC 采用过采样技术,调制器以大于奈奎斯特许多倍的速率采样模拟输入信号,把更多的量化噪音压缩到基本频带以外的高频区并由低通数字滤波器滤除这些带外噪声。
其对噪声的抑制能力很好。
3.1.3 AD7705的数字接口AD7705的数字接口是由八个寄存器和三线串行接口组成的。
寄存器组包括命令寄存器、设置寄存器、时钟寄存器、数据寄存器、测试寄存器、补偿校正寄存器、增益寄存器和一空的无效寄存器。
对这些寄存器的读写构成了整个芯片的工作过程。
再打开电源或复位后,设备等待对命令计算器进行写操,写给命令寄存器的数据决定下一个操作是读还是写以及那一个寄存器进行读写。
它是很重要的8位寄存器,各位的结构如表3-1。
DRDY ̅̅̅̅̅̅̅̅:数据准备好,写操作时,此位为0,其余7位的数据才可以写入此寄存器。
RSO-RS2:寄存器选择位。
决定下一个读写是对哪一个寄存器。
R/W̅̅̅:读写选择位。
STBY :静态位。
CH0-CH1:通道选择位。
设置寄存器是——8位寄存器,该寄存器设置芯片的工作模式,增益的大小,选择单双极性,控制缓冲器的工作,设置滤波器的工作方式,其各位结构如表3-2。
MD0-MD1:工作模式选择位。
可选择一般模式、自校验模式、零点校正模式和满量程模式四种模式。
G0-G2:增益设置。
B̅/U :缓冲控制。
FSYNC :同步滤波器设置。
时钟寄存器也是一8位寄存器。
可以选择滤波器的工作状态和控制时钟。
其各位表3-1 命令寄存器结构表3-2 设置寄存器结构结构如表3-3。
ZERO :零标志位。
CLKDIS :主时钟无效位。
CLKDIV :时钟分频位。
CLK :时钟位。
FS1-FS0:滤波器选择位,决定输出数据刷新率。
数据寄存器是一16位寄存器,测试寄存器是8位,补偿寄存器和增益寄存器都是24位,还有一个空的无效寄存器。
3.1.4 AD7705的接口电路AD7705的简单的串行接口使其可以方便的与大多数微型计算机、数字信号处理器与微处理器相连。
下面以8051单片机为例,介绍AD7705与其他接口电路如图3-3所示。
此接口电路给出两者的最少连接。
AD7705工作于三线串行方式,使用DATAOUT 、DATAIN 、SCLK 引脚进行控制。
AD7705工作于外部时钟同步方式,8051的TXD 产生时钟脉冲,经过反向器作为AD7705的外部时钟。