驾驶模拟器视景仿真系统的模块化建模方法
- 格式:pdf
- 大小:185.82 KB
- 文档页数:3


PreScan快速入门到精通第四讲快速搭建第一个自动驾驶仿真模型PreScan的愿景是通过提供虚拟验证功能来弥补仿真和验证之间的差距。
在实际建立一个PreScan实验并运行之前,我们先来看看下图描绘了四个重要的建模步骤。
1. 构建场景2. 增加控制系统3. 为传感器系统建模4. 运行实验。
这些步骤,通常是每次做实验时都要遵循的:构建场景最理想的情况是,首先使用实际的事故数据。
只有这样,才知道这个场景足够重要,足以导致事故的发生。
PreScan提供了轻松重建事故发生的可能性。
它有各种各样的工具,从构建道路和实现抽象的基础设施元素的模糊视点的简单方法,到支持近距离碰撞的工具。
这些工具的一个较大的部分是在第一个开始的时候就已经涉及到了。
增加控制系统控制系统的理解应该比传统的汽车控制系统如ESP、ACC等更宽泛。
控制系统还包括对象感知算法、传感器融合算法、决策算法等。
为传感器系统建模这可能很简单,就像实现一个可自由调整的理想化传感器(在PreScan中已经有了),也可能很复杂,就像实现一个详细的基于物理学的雷达模型,输出原始感知信号,由自己的数据处理算法进行后处理,处理后的数据被送入自己的DSP模型,负责跟踪和追踪目标。
由于系统的边界是灵活的,所以我们在这里更愿意谈论'为传感器系统建模'。
进行实验有几种选择:只需在Simulink环境中运行一个实验,同时在范围内观察结果,同时使用基于MATLAB的绘图脚本对获得的结果进行后期处理。
另一种选择是让基于MATLAB的批处理脚本配置、运行和后期处理方案。
如果这还不够的话,作为用户可以把自己的制动和油门和及方向盘链接上,在自己做的实验场景中进行驾驶。
3.1 例子:快速开始搭建第一个自动驾驶场景仿真模型本教程将向第一次使用PreScan的用户解释如何在PreScan中设置和运行实验。
它提供了使用PreScan的工作指南。
请不要在实验名称和实验地点中使用非西方文字(如日语、韩语、中文等)。

自动驾驶模块化设计模块化设计是一种将系统分解为独立的模块,每个模块都有特定的功能和职责的设计方法。
在自动驾驶技术中,模块化设计可以提供更高的可靠性、可维护性和可扩展性。
首先,自动驾驶系统可以划分为感知、决策和控制三个主要模块。
感知模块主要负责通过传感器收集环境信息,包括视觉、激光雷达等,并对这些信息进行处理和分析,以获得车辆周围的物体、路况和交通信号等。
决策模块根据感知模块提供的信息,综合考虑交通规则、车辆行为和路径规划等因素,生成合适的行驶方案。
控制模块负责将决策模块生成的指令转化为车辆的动作,控制车辆的加速、刹车、转向等操作。
在每个主要模块中,还可以进行更细粒度的模块化设计。
以感知模块为例,可以将其分为传感器数据采集、数据预处理、目标检测和跟踪等子模块。
传感器数据采集模块负责与各种传感器进行通信,获取实时数据。
数据预处理模块负责对原始数据进行滤波、去噪和校准等处理,以提高数据质量。
目标检测和跟踪模块负责识别感兴趣的物体,通过追踪算法跟踪这些物体的运动。
类似地,决策模块和控制模块也可以进一步划分为不同的子模块,以实现更高层次的模块化设计。
模块化设计的一个主要优势是增强了系统的可维护性。
每个模块都是独立的,并且具有清晰的接口,可以单独开发、测试和维护。
这样,当一个模块需要升级或修复时,可以仅对其进行修改,而不必对整个系统进行重构。
这降低了开发和维护的难度,并且在系统的不同部分间提供了更好的代码重用性。
此外,模块化设计还能够提高系统的可靠性。
由于每个模块是独立的,意味着一个模块的故障不会对其他模块产生严重影响。
例如,如果感知模块出现故障,决策和控制模块仍然可以继续工作,并采取相应的措施保证车辆的安全。
这种冗余设计减少了系统的单点故障,并提高了整个系统的可靠性和鲁棒性。
最后,模块化设计还可以提供更好的可扩展性。
当需要增加新的功能时,可以通过添加新的模块来实现扩展,而不影响现有的模块和系统架构。
这种灵活性使得自动驾驶系统能够适应未来的技术和需求的变化,例如增加对新传感器的支持或改进决策算法。

汽车驾驶模拟器的研究方法及步骤一、虚拟现实建模方法1、几何建模2、运动建模(1)物体位置物体位置包括物体的移动、旋转和缩放。
在视景仿真中,不仅需要一个全局性的绝对坐标,每个三维对象都需要建立一个相对坐标。
对每个对象都给予一个坐标系统,称之为对象坐标系统,这个坐标系统原点的位置随物体的移动而改变。
在虚拟驾驶系统中就是通过控制一个汽车局部坐标系的运动和变化来模拟汽车的运动过程。
(2)碰撞检测在视景仿真系统中,经常需要检查对象A是否与对象B碰撞。
碰撞检测需要计算两个物体的相对位置。
许多视景仿真系统在实时计算中都是采用OBB包围盒检测法,运用这种方法可以节省时间,但降低了精确性。
3、物理建模虚拟对象物理建模包括定义对象的质量、重量、惯性、表面纹理、光滑或粗糙、硬度、形状改变模式(橡皮带或塑料)等,这些特性与几何建模和行为规则结合起来,形成了更真实的虚拟物理模型。
4、行为建模在虚拟驾驶系统中,行为建模主要包括两个方面,一方面是对驾驶员所操纵的汽车的行为进行约束,建立汽车操纵模型,使其符合汽车自身的运动和驾驶人员的操作步骤;另一方面是对场景中非受控物体的行为进行建模,使其的运动符合自然规律,比如场景中自动运行的汽车、路旁的行人等。
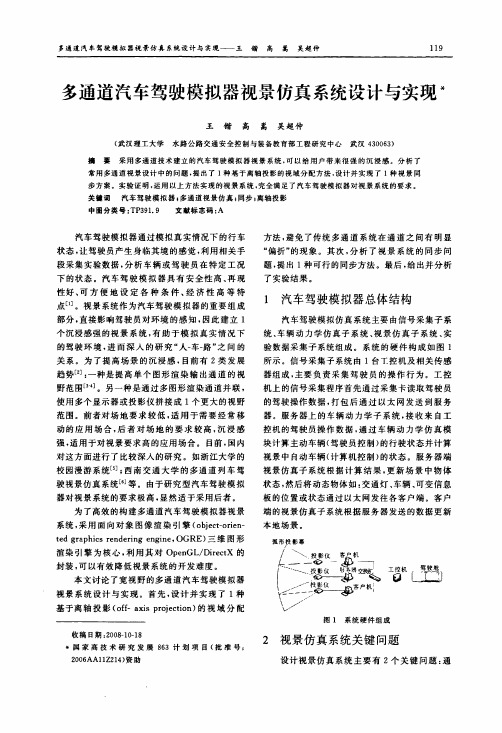
5、模型分割二、虚拟驾驶系统各模块功能分析和开发方案确定1、汽车虚拟驾驶系统的构成汽车虚拟驾驶系统主要由虚拟驾驶操作输入系统、汽车动力学模型、运动仿真模型、实时操纵模型、场景管理管理平台、视景和声音渲染输出以及汽车数据模型库、场景模型库和声音模型库等组成。
其中汽车动力学模型、运动仿真模型、实时操纵模型和虚拟驾驶场景管理平台是汽车虚拟驾驶系统的核心子系统。
系统的工作过程如下:在系统初始化时,根据用户的需求从汽车数据模型库中将用于仿真的车辆数据模型调入到动力学模型中,同时选择运行的三维场景,通过模型解析模块把它从场景数据库中调入场景管理平台;在仿真过程中,驾驶人员通过虚拟驾驶操作输入系统进行模拟驾驶操作,人机交互接口将油门、制动、换档和转向等动力学操作信息以及发动机启动、喇叭鸣笛等按钮操作状态送入汽车动力学模型和实时操纵模型中;经过仿真计算后,汽车运动仿真数据被送入运动摄像机模块中控制场景内摄像机的运动,同时汽车的行驶姿态还受到地面因素的影响;然后,场景管理控制模块根据此时摄像机的运动状态,通过视景渲染模块将三维场景在投影屏幕上实时反映出来,模拟视景变化,形成行车体感,并且通过虚拟仪表输出此时的汽车运行参数。
年第期5列车驾驶模拟器客室监控视景仿真系统的实现胡峰1朱金陵1郝昱2(1.西南交通大学智能控制与仿真工程研究中心,成都610031;2.西南交通大学电气工程学院,成都610031)摘要研究了一种基于虚拟现实技术的地铁列车客室监控视景仿真系统,并将其应用于地铁列车驾驶模拟器系统中。
使用OpenGL Performer 开发视景仿真系统,采用OpenGL 开发人机交互操作界面。
着重研究了系统功能结构、人际交互界面设计、人群行为与突发事件仿真等技术;使用了图形拾取算法和基于智能体的行为模拟,实现了具有真实感的客流仿真以及疏散仿真,最终给出了视景仿真结果。
关键词:模拟器;视景仿真;虚拟人;智能体;人群疏散Design and Implementation of Carr iage Monitoring System Simulation in Train Oper ation SimulatorHu Feng 1Zhu Jinling 1Ha o Y u 2(1.Intelligent Control and Simulation Research Center,Southwest Jiaotong University,Chengdu 610031;2.School of Electrical Engineering,Southwest Jiaotong University,Chengdu 610031)Abstr act Carriage visual system simulation based on virtual reality was introduced and implemented in train operation simulation system.This paper uses OpenGL Performer software package to develop framework of visual simulation system and OpenGL to develop the friendly human-computer interaction operation interface.This paper mainly studies these aspects as below:the system function structure,human-computer interaction operation interface design,crowd behavior and sudden ing picking algorithm and Agent,realize the realistic simulation of passenger flow and evacuation.Key words :simulator ;visual simulation ;virtual man ;agent ;crowd evacuation1引言列车驾驶模拟器是培训轨道交通列车司机的先进工具,具有训练过程安全、训练费用小、不影响正常行车、故障及操作训练可重复等优点。
自动驾驶系统中的交通场景仿真教程自动驾驶技术作为一项颠覆性的创新,正迅速改变着我们的交通方式和未来的出行体验。
而要实现安全可靠的自动驾驶系统,交通场景仿真是必不可少的一环。
本文将为您介绍自动驾驶系统中的交通场景仿真教程,帮助您更好地理解和应用这一技术。
一、什么是交通场景仿真?交通场景仿真是指通过计算机软件模拟真实道路交通环境的过程。
在自动驾驶技术中,交通场景仿真是对自动驾驶系统进行测试、验证和优化的重要手段。
通过构建各种交通场景,可以模拟不同的车辆行为、路况情况和交通事件,以评估自动驾驶系统在现实环境中的表现和性能。
二、交通场景仿真的意义1. 安全性验证:通过交通场景仿真可以模拟各种极端情况,如恶劣天气、紧急刹车等,以验证自动驾驶系统的安全性能。
这可以大大减少实际道路测试的风险,并加快系统的上线进程。
2. 优化算法:交通场景仿真可以帮助开发团队在不同的交通场景中不断迭代系统算法,以提高自动驾驶系统的性能和鲁棒性。
比如,通过多次仿真测试,可以针对不同的驾驶行为进行优化,从而提高车辆的自主驾驶水平。
3. 合规规则验证:交通场景仿真可以帮助开发者验证自动驾驶系统是否符合各地交通法规和道路标识。
这对于自动驾驶技术的推广和商业化具有重要意义。
三、构建交通场景仿真的基本步骤1. 场景建模:首先,需基于实际地理数据或造型软件进行道路场景的建模。
这包括道路拓扑结构、车道标线、交通信号灯、障碍物等元素的创建和布置。
2. 车辆行为建模:根据不同的交通行为规则和驾驶操作,对各类车辆的行为进行建模。
这包括车辆的加速、刹车、转弯、换道等行为规划。
3. 交通事件模拟:模拟交通事件可以有助于评估自动驾驶系统的应对能力。
例如,模拟突然刹车、行人突然冲出等情况,观察自动驾驶系统的反应和应对策略。
4. 传感器建模:在仿真中,还需要对车辆传感器进行建模,如激光雷达、摄像头和雷达等。
这些传感器的模拟将提供给自动驾驶系统输入数据,以进行相关算法的测试和优化。
自动驾驶建模与仿真实验总结
自动驾驶建模与仿真实验是指利用计算机技术和数学模型来模拟和评估自动驾驶系统的性能和安全性的过程。
这种方法可以在真实道路测试之前,通过虚拟环境进行快速、低成本的测试和验证。
在自动驾驶建模与仿真实验中,首先需要建立一个准确的车辆动力学模型。
这个模型描述了车辆的运动行为,包括加速度、制动力、转向等。
通过这个模型,我们可以在仿真环境中模拟车辆在不同场景下的运动。
接下来,我们需要对道路环境进行建模。
这包括道路的几何形状、标志、信号灯等。
这些信息可以通过地图数据或手动输入来获取。
在建模过程中,我们还需要考虑其他车辆、行人和障碍物的存在,以模拟真实道路上的交通情况。
完成车辆和道路环境的建模后,我们可以开始进行仿真实验。
在实验中,我们可以设置不同的场景和驾驶任务,例如直行、变道、停车等。
通过控制车辆的行为,我们可以观察系统的反应和性能。
同时,我们也可以引入不同的因素,如天气、路况等,来测试系统的鲁棒性和适应性。
在仿真实验过程中,我们可以收集和分析大量的数据。
这些数据可以用于评估系统的安全性、稳定性和效率。
通过对数据的分析,我们可以发现系统存在的问题,并提出改进方案。
同时,仿真实验还可以帮助我们优化控制算法、路径规划和决策制定等关键技术。
总结来说,自动驾驶建模与仿真实验是一种有效的方法,可以帮助我们评估自动驾驶系统的性能和安全性。
通过建立准确的车辆和道路环境模型,进行各种场景的仿真实验,我们可以发现问题并改进系统。
这种方法可以降低真实道路测试的成本和风险,并加速自动驾驶技术的发展。