汽车倒车雷达ppt课件
- 格式:ppt
- 大小:2.58 MB
- 文档页数:15
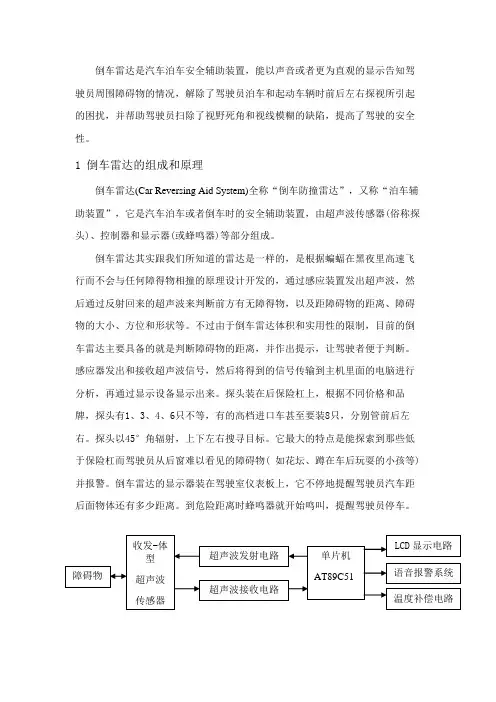
倒车雷达是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了驾驶的安全性。
1 倒车雷达的组成和原理倒车雷达(Car Reversing Aid System)全称“倒车防撞雷达”,又称“泊车辅助装置”,它是汽车泊车或者倒车时的安全辅助装置,由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。
倒车雷达其实跟我们所知道的雷达是一样的,是根据蝙蝠在黑夜里高速飞行而不会与任何障得物相撞的原理设计开发的,通过感应装置发出超声波,然后通过反射回来的超声波来判断前方有无障得物,以及距障碍物的距离、障碍物的大小、方位和形状等。
不过由于倒车雷达体积和实用性的限制,目前的倒车雷达主要具备的就是判断障碍物的距离,并作出提示,让驾驶者便于判断。
感应器发出和接收超声波信号,然后将得到的信号传输到主机里面的电脑进行分析,再通过显示设备显示出来。
探头装在后保险杠上,根据不同价格和品牌,探头有1、3、4、6只不等,有的高档进口车甚至要装8只,分别管前后左右。
探头以45°角辐射,上下左右搜寻目标。
它最大的特点是能探索到那些低于保险杠而驾驶员从后窗难以看见的障碍物( 如花坛、蹲在车后玩耍的小孩等)并报警。
倒车雷达的显示器装在驾驶室仪表板上,它不停地提醒驾驶员汽车距后面物体还有多少距离。
到危险距离时蜂鸣器就开始鸣叫,提醒驾驶员停车。
按探头分,倒车雷达有粘贴式、钻孔式和悬挂式三种。
粘贴式探头后有层胶,可直接粘在后保险杠上。
钻孔式探头,是在保险杠上打一个洞,然后把探头嵌进去。
悬挂式探头主要用于货车。
从显示器分,有数字显示、颜色显示和蜂鸣三种。
数字式显示器是一只如BP 机大小的盒子,安装在驾驶室仪表板上,距离直接用数字显示,精确到0.01mm,让驾驶员一目了然。
它会提醒驾驶员:1.5~0.8m为安全区;0.8~0.3m 为适当区;0.3~0.1m为危险区。
超声波检测的倒车雷达讲解倒车雷达(Car Reversing Aid Systems)的全称是“倒车防撞雷达”,也称“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
系统工作原理倒车雷达只需要在汽车倒车时工作,为驾驶员提供汽车后方的信息。
由于倒车时汽车的行驶速度较慢,和声速相比可以认为汽车是静止的,因此在系统中可以忽略多普勒效应的影响。
在许多测距方法中,脉冲测距法只需要测量超声波在测量点与目标间的往返时间,实现简单,因此本系统采用了这种方法。
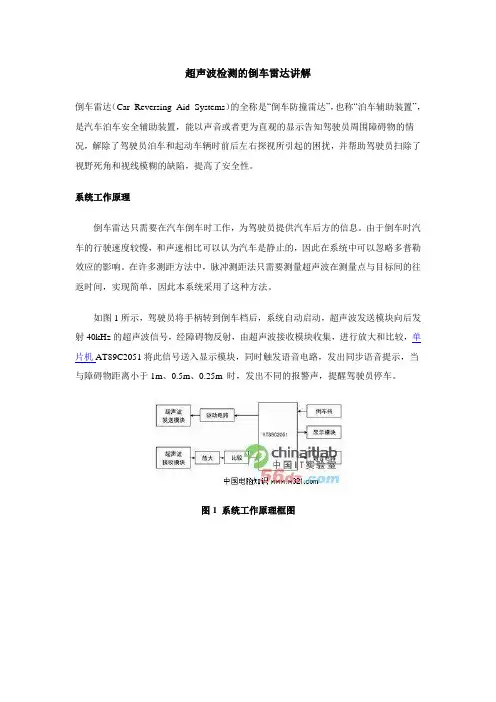
如图1所示,驾驶员将手柄转到倒车档后,系统自动启动,超声波发送模块向后发射40kHz的超声波信号,经障碍物反射,由超声波接收模块收集,进行放大和比较,单片机AT89C2051将此信号送入显示模块,同时触发语音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m 时,发出不同的报警声,提醒驾驶员停车。
图1 系统工作原理框图图2 超声波发送模块电路[NextPage]硬件设计1 超声波发送模块设计超声波发送器包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称“超声波换能器”)选用CSB40T,可采用软件发生法和硬件发生法产生超声波。
前者利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。
这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。
第二种方法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动换能器产生超声波。
这种方法的优点是无须驱动电路,但缺乏灵活性。
本设计采用第一种方法产生超声波,电路设计如图2所示。
40kHz的超声波是利用555时基电路振荡产生的。
其振荡频率计算式为f=1.43/((R 9+2·R 10)·C 5)。


06限量版雅阁特装件说明2006年9月上市06限量版雅阁将安装倒车雷达系统、电动后遮阳档和车载蓝牙免提电话系统等装备。
现将这些系统的介绍资料、系统部件更换方法发放到各特约销售服务店,供特约店服务人员处理和这些系统相关问题时参考。
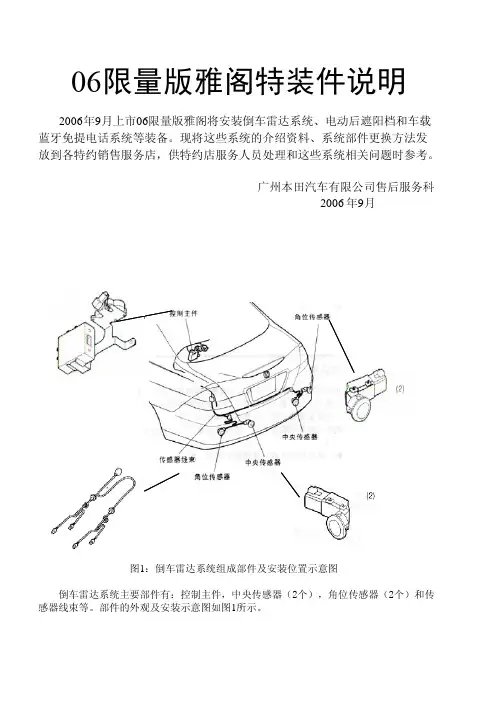
广州本田汽车有限公司售后服务科2006年9月Ⅰ、 倒车雷达系统一、倒车雷达系统主要组成部件及装配位置说明图1:倒车雷达系统组成部件及安装位置示意图倒车雷达系统主要部件有:控制主件,中央传感器(2个),角位传感器(2个)和传感器线束等。
部件的外观及安装示意图如图1所示。
二、系统说明倒车雷达主要用于汽车在低速倒车时感知汽车后部和侧面的物体。
倒车雷达系统在把换档杆拨到【R】位置时进入工作状态。
车辆倒车时,倒车雷达向外发射声波,传感器通过测定超声波从障碍物反射回的时间,从而计算传感器与障碍物之间的距离。
根据所测得障碍物距离的不同,系统将发出三种不同的警报声音:图2.传感器测距示意图(左图为角位传感器,右图为中央传感器)三、倒车雷达系统部件更换方法(一)、倒车雷达系统传感器更换方法1.拆下两个盖子,从后保险杠卸下两颗螺栓;拆下2个夹扣和6颗自攻螺钉,拆下后保险杠(拆卸方法参见06雅阁维修手册20-23页)。
2.断开线束和传感器的接头,拆下各传感器。
(图3)图42.拆下带垫圈螺栓②,把控制主件从车内面板的孔内拿出(图5)。
图33.按照相反的顺序安装各零件。
(二)、到车雷达系统控制主件更换方法1.从控制主件的蜂鸣器部上断开5芯插头,从控制主件的主件部上断开14芯插头(图4)。
图5。
超声波倒车雷达第一章前言倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松。
倒车雷达的提示方式可分为液晶、语言和声音三种;接收方式有无线传输和有线传输等。
本方案采用语音提示的方式,利用SPCE061A 单片机所具备的单芯片语音功能,外接三个超声波测距模组,组成一个示例的倒车雷达系统,语音提示报警(0.35m~1.5m)范围内的障碍物。
超声波倒车雷达第二章实现功能利用SPCE061A单片机、三个超声波测距模组实现超声波倒车雷达,要求具有下述功能:1.可以语音提示模组探测范围内(0.35m~1.5m)的障碍物;2.语音提示可指明哪一个方向(或区域)有障碍物在探测范围内;3.利用三个LED发光二极管表示三个传感器探测范围内是否有障碍物,当在探测范围内有障碍物时,发光二极管以一定频率闪烁,闪烁的频率以距离定,距离越近频率越高。
本方案要求所有的语音资源、程序代码都存放在一颗SPCE061A片内Flash当中;当语音播报时,如检测到左后方有障碍物,则用语音播放:“左后方”,如右后方有障碍物,则语音播方“右后方”;当检查到中间的传感器探测范围内有障碍特时,语音播放:“后方”。
而连续播放提示的间隔,要大于或等于3秒,以免过于频繁的播报语音。
超声波倒车雷达第三章核心器件简介本系统采用SPCE061A单片机作为主控制器,传感器模块采用凌阳大学计划的“超声波测距模组”。