南方GPSADJ静态数据处理与精度评估
- 格式:ppt
- 大小:3.40 MB
- 文档页数:52
GPS测量数据的质量评估与处理引言随着全球定位系统(GPS)的广泛应用,测量数据的质量评估与处理变得越来越重要。
在科学研究、工程测量和地理信息系统等领域,GPS测量数据不仅提供了位置信息,还可以用于计算速度、方向和加速度等参数。
然而,GPS测量数据的质量与环境条件、设备精度、数据处理等因素密切相关,需要进行细致的评估与处理。
一、 GPS测量数据的质量评估1. 环境条件的影响GPS测量数据的质量受到多种环境条件的影响,包括天气、大气湿度、地形等。
在复杂的城市环境中,高楼、树木和地下隧道等物体会引起信号衰减和多径效应,从而影响测量精度。
在开放的地区,天气条件如大风、雷暴等也会导致信号衰减和误差。
2. 设备精度的考虑GPS接收器的精度直接影响测量数据的质量。
不同的设备具有不同的精度要求,高精度的测量通常需要专业的测量仪器和技术支持。
对于一般应用,低精度的设备可能已经足够。
3. 数据处理流程数据处理流程包括数据采集、数据清理、数据处理和数据分析等环节,每一个环节都会对最后的结果产生一定影响。
在数据采集环节,采集设备的设置和观测站点的选择等决定了接收信号的质量。
数据清理阶段需要去除掉异常值和误差,并进行插值和滤波等操作。
数据处理阶段则需要根据测量目的选取适当的处理方法,如差分、浮动解等,以获得更高的精度。
二、 GPS测量数据的质量处理1. 数据预处理在进行数据处理之前,需要对原始数据进行预处理。
首先,对数据进行筛选,去除掉采集过程中的明显异常值和误差。
其次,对数据进行时间同步,确保采集的数据具有统一的时间标记。
最后,对数据进行插值和滤波,消除高频噪声和不连续性。
2. 数据差分差分处理是提高GPS测量数据质量的常用方法。
差分处理的原理是通过利用两个或多个接收器接收同一卫星的信号,消除掉接收器和卫星系统误差,提高位置精度。
常见的差分处理方法包括居民差分(RTK)和码差分(DGPS)等。
3. 数据滤波数据滤波是消除噪声和误差的重要手段,可以提高测量数据的精度。
gps静态测量数据处理一、基线解算的类型1、单基线解(1)定义:当有台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有条同步观测基线,其中最多可以选出相互独立的条同步观测基线,至于这条独立基线如何选取,只要保证所选的条独立基线不构成闭和环就可以了。
这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。
所谓单基线解算,就是在基线解算时不顾及同步观测基线间误差相关性,对每条基线单独进行解算。
(2)特点:单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS网的测设中。
2、多基线解(1)定义:与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。
(2)特点:多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。
(3)多站整体解(绝对坐标)(4)单基线解算的过程(5)利用基线解算软件解算基线向量的过程二、基线解算结果的质量评定指标1、单位权方差因子(1)定义:(2)实质:反映观测值的质量,又称为参考方差因子。
越小越好。
2、RMS - 均方根误差(1)定义:(2)实质:表明了观测值的质量,观测值质量越好,越小,反之,观测值质量越差,则越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。
3、数据删除率(1)定义:在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。
被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。
(2)实质:数据删除率从某一方面反映出了GPS原始观测值的质量。
数据删除率越高,说明观测值的质量越差。
4、RATIO(1)定义:RATIO值为在采用搜索算法确定整周未知数参数的整数值时,产生次最小的单位权方差与最小的单位权方差的比值。
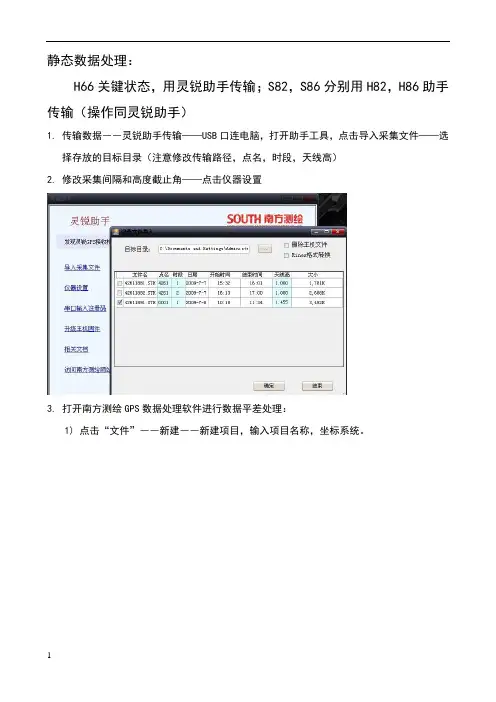
南方GPS静态数据处理步骤具体操作静态数据处理:H66关键状态,用灵锐助手传输;S82,S86分别用H82,H8 6助手传输(操作同灵锐助手)1. 传输数据――灵锐助手传输——USB口连电脑,打开助手工具,点击导入采集文件——选择存放的目标目录(注意修改传输路径,点名,时段,天线高)2. 修改采集间隔和高度截止角——点击仪器设置静态数据处理:H66关键状态,用灵锐助手传输;S82,S86分别用H82,H8 6助手传输(操作同灵锐助手)1. 传输数据――灵锐助手传输——USB口连电脑,打开助手工具,点击导入采集文件——选择存放的目标目录(注意修改传输路径,点名,时段,天线高)2. 修改采集间隔和高度截止角——点击仪器设置3. 打开南方测绘GPS数据处理软件进行数据平差处理:1) 点击“文件”――新建――新建项目,输入项目名称,坐标系统。
静态数据处理:H66关键状态,用灵锐助手传输;S82,S86分别用H82,H8 6助手传输(操作同灵锐助手)1. 传输数据――灵锐助手传输——USB口连电脑,打开助手工具,点击导入采集文件——选择存放的目标目录(注意修改传输路径,点名,时段,天线高)2. 修改采集间隔和高度截止角——点击仪器设置3. 打开南方测绘GPS数据处理软件进行数据平差处理:1) 点击“文件”――新建――新建项目,输入项目名称,坐标系统。
2) 点击“数据录入” ――增加观测数据文件――然后点坐标数据录入(增加已知点坐标)3) 点击坐标菜单栏“观测数据文件”――进行数据编辑――选种数据点鼠标右键键―― 剔除断断续续数据。
如下图4)基线解算――全部解算――处理不合格的基线为灰色,合格的红色,在网图上双击不合格的基线,弹出下面窗口,调高或调低高度截止角和历元间隔,再解算,直到方差比大于3。
5) 成果输出:平差报告(文本文档);可选择输出需要的内容网平差成果:输出word文档。
全球定位系统设备的精度评估与校正方法全球定位系统(Global Positioning System, GPS)是一种通过卫星定位技术来确定地理位置的系统。
随着技术的不断发展,GPS设备在我们的日常生活中发挥着越来越重要的作用。
人们常常使用GPS设备导航行驶、追踪物品、甚至用于军事等方面。
然而,准确的定位对于许多应用来说至关重要,因此我们需要评估和校正GPS设备的精度。
本文将介绍一些常用的GPS精度评估和校正方法。
在评估GPS设备的精度之前,首先需要了解GPS定位误差的来源。
GPS定位误差主要包括卫星钟差、大气延迟、接收机钟差、多径效应、几何精度等因素。
这些因素可以互相影响,并对定位的精度产生不同程度的影响。
一种常用的GPS精度评估方法是对同一位置进行多次测量,并计算出平均误差。
例如,可以在一个固定位置上放置GPS设备,然后进行一系列连续的定位测量。
通过对这些测量结果进行统计分析,可以得到GPS设备的平均定位误差。
这种方法可以帮助我们了解GPS设备的整体性能,但它并不能提供对不同位置的定位精度的具体信息。
为了更准确地评估GPS设备的定位精度,我们可以使用多点校正法。
这种方法要求我们在不同的位置上进行测量,并记录下每个位置的实际坐标。
然后,将这些实际坐标与GPS设备测量得到的坐标进行比较,计算出定位误差。
通过分析这些误差数据,我们可以确定GPS设备在不同位置上的定位精度,并进一步优化校正方法。
这种方法的优势在于可以提供更为细致的定位精度信息,从而帮助我们更好地理解GPS设备的定位性能。
除了评估GPS设备的精度,我们还需要校正GPS设备的误差。
一种常用的校正方法是差分定位法。
差分定位法通过将一个已知位置的GPS设备与待测设备进行对比测量,从而消除定位误差。
具体而言,我们可以将一个高精度的GPS设备称为参考站,将待测设备称为流动站。
参考站和流动站同时进行测量,参考站记录下其实际坐标以及接收到的GPS信号数据。
G P S-R T K三种校正方法的实验与精度分析-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIANGPS-RTK三种校正方法的实验与精度分析吴松涛(本钢设计研究院有限责任公司 117000)摘要:载波相位差分技术(Reat Time Kinematic简称RTK)又称实时动态定位技术,能够实时提供指定坐标系的三维坐标成果,在测程20km以内可以达到厘米级精度。
广泛应用于工程放样、工程地形图测绘、房产测绘,地籍测量及某些控制测量,极大的提高了作业效率。
由于GPS定位是直接测定点位在WGS84坐标系中的坐标和高程,故我们需要通过点位校正或求得转换参数将测得的WGS84坐标系成果转换为我们所需要的坐标系。
文章以南方灵锐S86T型RTK为例对GPS—RTK的三种常见的校正方法(单点校正、两点校正、参数校正)的点位精度进行对比分析。
关键词:GPS-RTK;单点校正;二点校正;参数校正GPS—RTK系统由一个基准站,若干个流动站及通讯系统三部分组成,基准站包括GPS接收机、GPS天线、无线电通讯发射设备、基准站控制器、电源等部分组成,基准站GPS接收机本身具有传输参数、测量参数及坐标系统等内容的设置功能,使控制器与GPS接收机合为一体。
一个流动站由GPS天线、GPS接收机、电源、接收天线、通讯设备,电子手簿组成。
图1为RTK系统结构图。
(引自参考文献【1】)基准站移动站图1 RTK系统结构图1、 GPS-RTK点校正理论GPS点校正主要目的是建立GPS接收机采集的WGS84数据与地方控制网之间关系,不同坐标系之间的坐标转换通常有两类转换模式:一类是二维转换模式;一类是三维转换模式。
二维转换模式只适合于小区域转换且只需要两个坐标系的二维坐标成果;三维转换模式适合任何区域坐标转换。
二维转换模式通常采用平面四参数模型、三维转换模式通常采用布尔莎(Bursa)七参数转换模型。
1.1、单点校正单点校正并不依据上述转换模型,而是通过观测,求出校正点的WGS84坐标,再根据校正点的已知坐标求出3个平移参数(△X,△Y,△H),不考虑旋转参数及比例因子。
静态数据处理:
H66关键状态,用灵锐助手传输;S82,S86分别用H82,H86助手传输(操作同灵锐助手)
1.传输数据――灵锐助手传输——USB口连电脑,打开助手工具,点击导入采集文件——选
择存放的目标目录(注意修改传输路径,点名,时段,天线高)
2.修改采集间隔和高度截止角——点击仪器设置
3.打开南方测绘GPS数据处理软件进行数据平差处理:
1)点击“文件”――新建――新建项目,输入项目名称,坐标系统。
2)点击“数据录入”――增加观测数据文件――然后点坐标数据录入(增加已知点坐标)
3)点击坐标菜单栏“观测数据文件”――进行数据编辑――选种数据点鼠标右键键――
剔除断断续续数据。
如下图
4)基线解算――全部解算――处理不合格的基线为灰色,合格的红色,在网图上双击不合格的基线,弹出下面窗口,调高或调低高度截止角和历元间隔,再解算,直到方差比
大于3。
4)基线处理合格后,点击平差处理――平差参数设置――将二位平差选择下方方框的勾
去掉――依次点击按钮――A――3D—2D—H(分别为:自动处理,三维平差,二维平差,高程拟合)
5)成果输出:
平差报告(文本文档);可选择输出需要的内容
网平差成果:输出word文档。
平差过程中注意实时保存。
静态与动态(RTK)GPS高程精度分析摘要:由于GPS 技术的提高, 国内外学者采用数学拟合的方法求解高程异常值。
但各种拟合方法都有它的优缺点,都有其适用的地区。
大量的实践数据表明控制测量已经在许多工程GPS 中得到应用, GPS 测量的平面坐标精度是可靠的, 能达到工程测量的要求, 而高程测量方面由于受坐标系统不一致、观测误差等的影响, 其精度一直被认为不太可靠, 这在很大程度上限制了GPS 技术的应用。
因此, 有必要对GPS 高程测量的精度和方法进行深入的探讨, 以使其更广泛地应用于测量领域, 为我国的工程建设服务。
关键词:GPS;RTK;高程;测量;精度Abstract: Because GPS technology improves, the scholars at home and abroad by using the method of mathematical fitting for height anomaly. But various fitting methods has its advantages and disadvantages, has its application area. Large amount of practical data show control measure has been applied in many engineering GPS, GPS measurement plane coordinate accuracy is reliable, can meet the requirements of engineering survey, and height measurement is affected by the coordinate system is not consistent, and observation error, the accuracy has been considered less reliable, application of the limits of the GPS in a large extent. Therefore, it is necessary to accuracy and method of GPS height measurement are discussed, in order to make it more widely applied in the measurement field, for our country’s construction services.Key words: GPS; RTK; elevation; measurement; precision1 对GPS网进行静态和动态(RTK)GPS高程量测本次试验采取的是静态载波相位相对定位模式和动态(RTK)测量模式,下面分别介绍9600型静态载波相位相对定位模式和南方GPS(RTK)9800型测量模式。
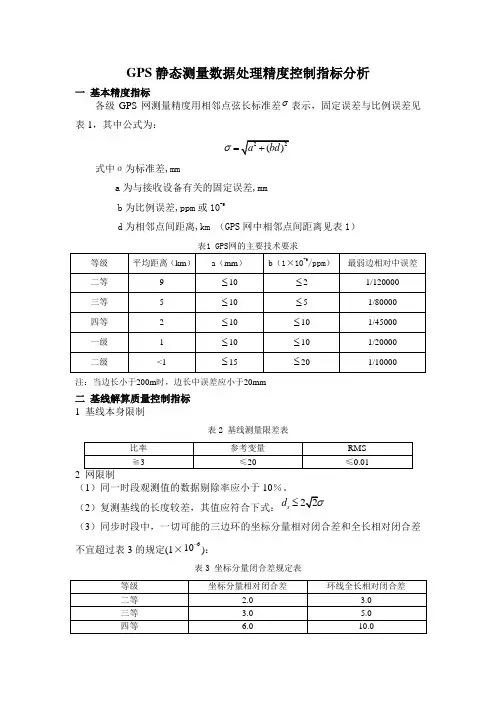
GPS静态测量数据处理精度控制指标分析
一基本精度指标
各级GPS网测量精度用相邻点弦长标准差σ表示,固定误差与比例误差见表1,其中公式为:
σ=
式中σ为标准差,mm
a为与接收设备有关的固定误差,mm
b为比例误差,ppm或10-6
d为相邻点间距离,km (GPS网中相邻点间距离见表1)
注:当边长小于200m时,边长中误差应小于20mm
二基线解算质量控制指标
1 基线本身限制
表2 基线测量限差表
(1)同一时段观测值的数据剔除率应小于10%。
(2)复测基线的长度较差,其值应符合下式:s d≤
(3)同步时段中,一切可能的三边环的坐标分量相对闭合差和全长相对闭合差
10-):
不宜超过表3的规定(1×6
表3 坐标分量闭合差规定表
X Y Z S W W W W ⎫
≤⎪
≤⎪
⎬
≤⎪
⎪
≤⎭
式中n 为闭合环边数,σ为相应级别规定的精度(按实际平均边长计算)。
表4 闭合环或符合路线边数的规定
三 网平差质量控制指标
(1)无约束平差中,基线分量的改正数(V △x ,V △y ,V △z )绝对值满足下式:
333x y z V V V σσσ∆∆∆⎫
≤⎪
≤⎬
⎪
≤⎭
(2)约束平差中,基线向量的改正数与经过粗剔除后的无约束平差结果的同名
基线相应改正数的较差的绝对值应满足要求(2x dV σ∆≤,2y dV σ∆≤,2z dV σ
∆≤); (3)最弱边相对中误差精度满足表1中相应要求。
GPS差分定位的数据处理与精度分析方法GPS差分定位是一种常用的定位技术,通过正确处理GPS接收机接收到的信号,并利用差分修正,可以提高定位的精度。
本文将介绍GPS差分定位的数据处理方法,并分析其精度问题。
一、GPS差分定位的原理GPS差分定位是基于GPS信号的接收机和参考站之间的相对测量差异来实现的。
它利用参考站接收到的真实位置和GPS接收机接收到的位置信息之间的差异,计算出接收机的位置误差,并进行修正。
数据处理是GPS差分定位中的关键步骤。
首先,接收机会接收到来自GPS卫星的信号,并计算出其接收到信号的时间。
然后,接收机将接收到的信号与参考站接收到的信号进行比较,计算出两者之间的相对误差。
二、GPS差分定位的数据处理方法1. 数据预处理在进行差分定位之前,首先需要对接收到的数据进行预处理。
这包括对信号进行滤波和去噪处理,以提高信号的质量和准确性。
同时,还需要对接收到的信号进行时间同步,以确保数据的一致性。
2. 数据差分与修正接收机接收到的数据与参考站接收到的数据之间存在一定的差异,需要通过差分计算来确定接收机的位置误差。
这一过程包括计算接收机和参考站之间的相对距离和接收机的位置误差,并进行修正。
3. 数据处理与解算在进行数据处理和解算时,需要使用一定的数学模型和算法来确定接收机的位置。
这包括进行最小二乘估计等数学方法,以提高定位的精度和准确性。
三、GPS差分定位的精度分析GPS差分定位的精度受到多种因素的影响。
首先,天线的位置和姿态误差会对定位的精度产生影响。
接收机的接收能力也会对定位的精度产生一定的影响。
其次,GPS卫星的位置精度和时钟精度也会对定位的精度产生影响。
卫星的几何配置和可见性也会影响定位的精度。
此外,大气延迟和多路径效应等因素也会对定位的精度产生一定的影响。
最后,数据处理的方法和算法也会对定位的精度产生影响。
不同的算法和处理方法有不同的精度和准确性,需要根据具体情况选择合适的方法。
GPS静态处理报告1. 引言全球定位系统(GPS)是一种通过卫星信号来确定地理位置的技术。
它广泛应用于导航、地图制作、航空航海等领域。
在GPS领域,静态处理是一种常用的数据处理方法,用于对GPS观测数据进行精确的位置计算。
本报告将介绍GPS静态处理的步骤和思路。
2. 数据收集在进行GPS静态处理之前,首先需要收集GPS观测数据。
一般情况下,我们可以通过GPS接收器来获取这些数据。
GPS接收器会接收到卫星发射的信号,并记录下信号的时间和强度等信息。
为了获得精确的定位结果,收集到的数据需要包括至少4颗以上的卫星观测数据。
3. 数据预处理在进行GPS静态处理之前,需要对收集到的数据进行预处理。
预处理的目的是去除数据中的噪声和错误,以提高后续处理的准确性。
常见的预处理步骤包括:•数据筛选:根据特定的标准,筛选出可用的卫星观测数据,去除掉无效或异常的数据;•数据平滑:对观测数据进行平滑处理,以去除高频噪声;•数据插值:对缺失的数据点进行插值处理,以补全数据。
4. 数据处理在完成数据预处理之后,可以进行GPS静态处理。
GPS静态处理的主要目标是计算出接收器的精确位置。
常用的GPS静态处理方法包括最小二乘法、加权最小二乘法等。
步骤如下:1.选择合适的数据处理软件和工具;2.设置观测数据的初始值;3.进行迭代计算,不断优化观测数据的位置;4.根据收敛准则,判断迭代计算是否结束;5.输出最终的位置结果。
5. 结果分析完成GPS静态处理后,可以对结果进行分析和评估。
主要包括以下几个方面:•位置误差分析:比较计算得到的位置与实际位置之间的误差,评估计算的准确性;•精度评估:根据计算结果的精度指标,评估计算的可靠性;•数据可视化:将计算结果可视化展示,以便更直观地理解和分析数据。
6. 结论GPS静态处理是一种常用的数据处理方法,用于对GPS观测数据进行精确的位置计算。
通过数据收集、预处理、处理和结果分析等步骤,可以得到接收器的精确位置。
南方GPS静态测量及数据处理(实例)GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。
主要用于建立各种级别的控制网。
进行GPS静态测量时,认为GPS 接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。
在测量中,GPS静态测量的具体观测模式是多台(3台以上)接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。
使用GPS进行静态测量前,先要进行点位的选择,其基本要求有以下几点:1、周围应便于安置接收设备和操作,视野开阔,市场内障碍物的高度角不宜超过15度;2、远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200米;远离高压输电线和微波无线电信号传送通道,其距离不小于50米;3附近不应有强烈反射卫星信号的物件(如大型建筑物、大面积水域等);4、地面基础稳定,易于点的保存;5、充分利用符合要求的旧有控制点。
GPS点位选好后,就可以架站进行静态数据采集了。
在采集静态数据时,一定要对中整平,在采集的过程中需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高(S86量测高片高,S82量斜高)。
用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标。
下面以为临城建设局做的GPS静态测量为例,介绍静态数据处理的过程。
打开GPS数据处理软件,在文件里面要先新建一个项目,需要填写项目名称、施工单位、负责人,并设置坐标系统和控制网等级,基线的剔除方式。
在这里由于利用的旧有控制点所属的坐标系统是1954北京坐标系3度带,因此坐标系统设置成1954北京坐标系3度带。
控制网等级设置为E级,基线剔除方式选着自动。
在数据录入里面增加观测数据文件,若有已解算好的基线文件,则可以选择导入基线解算数据。
增加观测数据文件后,会在王图显示窗口中显示网图,还需要在观测数据文件中修改量取的天线高和量取方式(S86选择测高片,S82选择天线斜高)。
gps静态测量技术总结_测量工作总结GPS静态测量技术总结一、引言GPS(全球定位系统)静态测量技术是一种通过GPS卫星信号进行精确测量的技术方法。
该技术广泛应用于测量领域,包括测量地球表面的坐标、高程、速度和方位等要素。
本文对GPS静态测量技术进行了总结,包括仪器设备、测量步骤、数据处理和精度评定等方面。
二、仪器设备GPS静态测量所需的主要仪器设备包括GPS接收机、天线和数据采集器。
GPS接收机用于接收GPS卫星发出的信号,并计算出接收机的位置信息。
天线用于接收GPS卫星信号,并将其转化为电信号输入到GPS接收机中。
数据采集器用于记录接收机测量得到的数据。
还需要使用三角支架或三脚架来固定测量设备,确保测量的稳定性和准确性。
三、测量步骤GPS静态测量的基本步骤包括:站址选择、设备设置、数据采集和数据处理。
站址选择是指根据测量要求选择合适的测量站点,确保测量的可行性和有效性。
设备设置是指对GPS接收机和数据采集器进行设置,包括设置测量参数、确保设备连接正常等。
数据采集是指在测量过程中,通过数据采集器记录GPS接收机测量得到的数据。
数据处理是指对采集到的数据进行处理和分析,得到最终的测量结果。
四、数据处理GPS静态测量的数据处理主要包括数据下载、数据编辑、数据差分和数据计算等过程。
数据下载是指将采集到的数据从数据采集器中传输到计算机中,为后续处理做准备。
数据编辑是指对下载的数据进行编辑和筛选,去除异常数据和冗余数据。
数据差分是指将测站与控制点进行差分处理,消除大气延迟和钟差等误差,提高测量精度。
数据计算是指利用差分后的数据,通过测量模型和算法计算出目标点的坐标、高程、速度和方位等要素。
五、精度评定GPS静态测量的精度评定通常通过比对实测值和控制点值来实现。
实测值是指通过GPS 静态测量得到的测量结果,控制点值是指由已知控制点测量得到的测量结果。
通过对实测值和控制点值进行比对,可以评定GPS静态测量的精度。