直流无刷电机本体设计
- 格式:doc
- 大小:804.00 KB
- 文档页数:23
直流无刷电机毕业设计毕业设计论文论文题目:直流无刷电机学生姓名:学生学号:专业班级:指导教师:日期:AbstractBrushless DC Motor摘要无刷直流电机是最近发展起来的结合了多学科技术的一种新型电机,结合机电一体化,具有高速度、高效率、高动态响应、高热容量和高可靠性、免维护等优点,同时还具有低噪声和长寿命等特点。
非常适合使用在24小时连续运转的产业机械及空调冷冻主机、风机水泵、空气压缩机负载;低速高转矩及高频繁正反转不发热的特性,更适合应用于机床工作母机及牵引电机的驱动;其稳速运转精度比直流有刷电机更高,比矢量控制或直接转矩控制速度闭环的变频驱动还要高,性能价格比更好,是现代化调速驱动的最佳选择。
目前无刷电机已广泛应用于各种领域,如医疗仪器、分析仪器、材料处理、过程控制、机床工业、纺织工业、轻工机械、电动自行车等。
无刷直流电机的控制要比普通有刷电机的控制要复杂得多。
目前直流电机的控制方法主要有两种,一种是采用专用得直流电机控制芯片,如Motorola公司的MC33035;另一种控制方法各个厂家根据自己的需求采用单片机或DSP进行开发设计。
本设计主要采用嵌入式单片机ATMEGA48写入控制程序,从而形成一种高性能直流无刷电机控制器。
其不但能实现MC33035直流电机控制芯片的全部功能,而且具有接口灵活,功能完善,成本低廉、全数字控制等优点,用户能根据不同应用场合进行灵活配置。
关键词:无刷直流电机、HALL、PWM目录Abstract ............................................................................................... 错误!未定义书签。
摘要..................................................................................................... 错误!未定义书签。
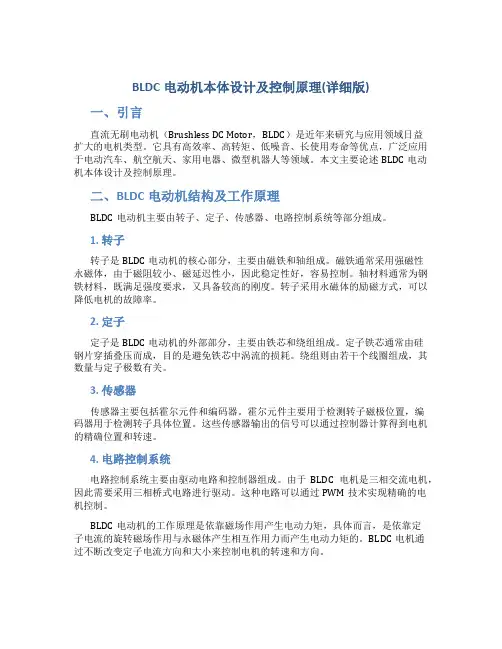
BLDC电动机本体设计及控制原理(详细版)一、引言直流无刷电动机(Brushless DC Motor,BLDC)是近年来研究与应用领域日益扩大的电机类型。
它具有高效率、高转矩、低噪音、长使用寿命等优点,广泛应用于电动汽车、航空航天、家用电器、微型机器人等领域。
本文主要论述BLDC电动机本体设计及控制原理。
二、BLDC电动机结构及工作原理BLDC电动机主要由转子、定子、传感器、电路控制系统等部分组成。
1. 转子转子是BLDC电动机的核心部分,主要由磁铁和轴组成。
磁铁通常采用强磁性永磁体,由于磁阻较小、磁延迟性小,因此稳定性好,容易控制。
轴材料通常为钢铁材料,既满足强度要求,又具备较高的刚度。
转子采用永磁体的励磁方式,可以降低电机的故障率。
2. 定子定子是BLDC电动机的外部部分,主要由铁芯和绕组组成。
定子铁芯通常由硅钢片穿插叠压而成,目的是避免铁芯中涡流的损耗。
绕组则由若干个线圈组成,其数量与定子极数有关。
3. 传感器传感器主要包括霍尔元件和编码器。
霍尔元件主要用于检测转子磁极位置,编码器用于检测转子具体位置。
这些传感器输出的信号可以通过控制器计算得到电机的精确位置和转速。
4. 电路控制系统电路控制系统主要由驱动电路和控制器组成。
由于BLDC电机是三相交流电机,因此需要采用三相桥式电路进行驱动。
这种电路可以通过PWM技术实现精确的电机控制。
BLDC电动机的工作原理是依靠磁场作用产生电动力矩,具体而言,是依靠定子电流的旋转磁场作用与永磁体产生相互作用力而产生电动力矩的。
BLDC电机通过不断改变定子电流方向和大小来控制电机的转速和方向。
三、BLDC电动机控制原理1. 电机转速控制为了实现BLDC电动机的精确控制,需要对电机的转速进行控制。
一般采用PID控制算法对电机进行控制。
PID算法通过将实际转速与设定值进行比较,计算出误差,然后根据误差大小来调整控制电压的大小和方向。
这种方法可以有效地降低电机的振动和噪声,提高电机的精度和稳定性。
无刷直流永磁电动机设计实例一. 主要技术指标1. 额定功率:W 30P N =2. 额定电压:V U N 48=,直流3. 额定电流:A I N 1<3. 额定转速:m in /10000r n N =4. 工作状态:短期运行5. 设计方式:按方波设计6. 外形尺寸:m 065.0036.0⨯φ二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P '直流电动机 W P K P NNm i 48.4063.03085.0'=⨯==η,按陈世坤书; 长期运行 N i P P ⨯''+='ηη321 短期运行 N i P P ⨯''+='ηη431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比L/D λ′=27.计算电枢内径m n B A P D N s i i i 23311037.110000255.0110008.048.401.61.6-⨯=⨯⨯⨯⨯⨯=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-⨯= 8. 气隙长度m 3107.0-⨯=δ 9. 电枢外径m D 211095.2-⨯= 10. 极对数p=111. 计算电枢铁芯长 m D L i 221108.2104.12--⨯=⨯⨯='='λ根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-⨯12. 极距 m p D i 221102.22104.114.32--⨯=⨯⨯==πτ 13. 输入永磁体轴向长m L L m 2108.2-⨯==三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22110733.06104.114.3--⨯=⨯⨯==π3. 槽形选择梯形口扇形槽,见下图;4. 预估齿宽: m K B tB b Fe t t 2210294.096.043.155.010733.0--⨯=⨯⨯⨯==δ ,t B 可由设计者经验得,t b 由工艺取m 210295.0-⨯5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056.196.0255.08.02.222-⨯=⨯⨯⨯⨯=≈Φ=δδτ1j B 可由设计者经验得,1j h 由工艺取m 210325.0-⨯根据齿宽和轭高作出下图,得到具体槽形尺寸6. 气隙系数 135.1)5()5(2010101=-++=b b t b t K δδδ7.电枢铁心轭部沿磁路计算长度m h ph h D L j ij t i i 2111110064.2)21(2)2(-⨯=+-⨯++=απ8.槽面积2410272.0m S -⨯=电枢铁芯材料确定从数据库中读取电枢冲片材料DW540-50电枢冲片叠片系数96.01=Fe K 电枢冲片材料密度331/1075.7m j ⨯=ρ电枢冲片比损耗kg W p s /16.2)50/10(=四.转子结构1. 转子结构类型:瓦片磁钢径向冲磁2. 永磁体外径m D D i m 211026.12-⨯=-=δ3. 永磁体内径m H D D m m mi 21086.02-⨯=-=4. 永磁体极弧系数8.0=m α5. 紧圈外经D 2=m 21032.1-⨯6. 永磁材料磁化方向截面积24221043.421026.114.3108.28.02m p D L S mm m m ---⨯=⨯⨯⨯⨯⨯==πα7. 永磁材料的选取永磁体材料:钕铁硼 剩磁r B :矫顽力c H :796 kA/m 永磁体材料密度m ρ:cm 38. r B 对应的磁通Wb S B m r r 41087676.4-⨯=⋅=φ 9.c H 对应的磁势A D D H F mim c c 3200)2(2=-= 10. 转子轭材料选择由于转子较细,故转轴、磁轭为一体,选用10号钢 11.转子磁轭等效宽度 m D D D D b i mi i e j 22222221033.02102.01086.022---⨯=⨯-⨯=-=-=12.转子磁轭沿磁路方向长度瓦片m pD D b L mii e j j 222221083.0)21(4)(-⨯=-++=απ五、磁路计算1. 漏磁系数2.1=σ2. 气隙磁通δδδταB L B i 926.4==Φ3.空载电枢齿磁密δδδB B K b t B B Fe t t 588.296.010295.010733.022=⨯⨯⨯⨯==-- 4. 空载电枢轭磁密δδδB B L K h B Fe j j 819.28.296.0325..02926.4211=⨯⨯⨯=Φ=5. 空载转子轭磁密δδδσB B L b B j j 198.38.233.02926.42.1222=⨯⨯⨯=Φ= 6. 气隙磁势A B B B K F 462610127.010135.11007.06.1106.1⨯=⨯⨯⨯⨯⨯=⨯=-δδδδδδ7. 定子齿磁势A H H h H F t t t t t 22109.01045.022--⨯=⨯⨯== 8. 定子轭部磁势A H L H F j j j j 211110064.2-⨯== 9. 转子轭部磁势A H L H F j j j j 222221083.0-⨯== 10. 总磁势∑+++=21j j t F F F F F δ 11. 总磁通Wb B m 410926.42.1-⨯⨯=Φ=Φδδσ12.空载特性曲线计算见表;因为表面磁钢永磁电机电动机负载时气隙的合成磁场与空载时差不多;六.电路计算1. 绕组形式及电子开关形式:两相导通星形三相六状态 2. 绕组系数采用单层集中整距绕组,即 第一节距)(31槽==τy 每极每相槽数12pmZq ==m 是相数;p 为极对数 故绕组系数1=w K3. 预取空载转速m in /120000r n =' 4. 每相绕组串联匝数φW '0.7V U 24.8025.700为管子压降,取匝,∆=Φ'∆-='δφαpn UU W i取匝82W =φ5. 电枢总导体数根4922==φmW N6. 实际每槽导体数N s =N/Z=82根7. 实际空载转速0nmin /11742109039.28217.02488.05.725.7400r pW U U n i=⨯⨯⨯⨯-⨯⨯=Φ∆-=-δφα8. 计算绕组端部长度m pD D pDav l i b 211101.42)2)(2.122.1-⨯=+=='ππ 9. 计算电枢绕组每匝平均长度m l L L bav 2108.13)(2-⨯='+= 10. 预估导线截面积2661007086.01101463.04830m a J U P S aN N c-⨯=⨯⨯⨯⨯=''='η 式中26'/1014m A J a⨯=为预取导线电流密度 1=a 为每相绕组支路数 11. 导线选取选择F 级绝缘导线QZY-2 导线计算截面积26210066.04m d S c c -⨯==π导线最大截面积262max max 10092.04m d S c c -⨯==π导线直径md m d c c 3max 310342.01029.0--⨯=⨯=12. 槽满率计算公式选择35.01042max=⨯⋅=-S c s s S S N K π13. 实际导线电流密度26'/1015m A aS U P J c N Na ⨯==η 14. 每相电枢绕组电阻Ω==⨯=Φ-31022)20(62)20(20cavcava S a l W S ma Nl r ρρ式中)/(0157.02)20(m mm ⋅Ω=ρ为导线的电阻率 设电机绕组的工作温度t 为75C 0,则导线工作温度电阻Ω=⨯-+=65.3])20(1[20t a at p t r r 式中00395.0=t p 为导线的电阻温度系数七.电枢反应计算1. 起动电流 A r UU I atst 77.722=∆-=2. 起动时每极直轴电枢反应最大值A K W I F w st sdm 27643==φ 3. 额定工作时的反电动势 V n W pC N ie 5.39152'==δφφα 4. 额定工作时电枢电流 A r EU U I ata 97.022=-∆-=5. 额定工作时最大直轴去磁磁势A K W I F W a adm 3443==φ 6. 负载工作点:根据sdm F 和adm F ,可在空载永磁体工作图上作出负载和起动时的特性曲线2、3,求负载特性曲线与永磁体去磁曲线的交点,得负载工作点:负载气隙磁感应强度T B 5872.0=δ 负载气隙磁通Wb 4108925.2-⨯=Φδ负载电枢齿磁感应强度t B = 负载电枢轭磁感应强度j B =7. 额定工作时电磁转矩m N I W pT a iem .0366.04==δφφπα8. 起动电磁转矩 m N I C T st T st .293.0=Φ=δ 八. 性能计算1. 电枢铜损W r I p at a Cu 87.622== 2. 电枢铁损W G B G B f p K p j j t t a Fe 11.4)()50)(50/10(12123.1=+= 式中a K ------铁损工艺系数,取2=a K1j G ------定子轭重kg L h D D G j s j 05816.010])2([43211211=⨯--=-πρt G ------定子齿重kg ZL h b G t t s t 0173.0103=⨯=-ρ3. 轴承摩擦损耗W n G K p N p mp mpn 05.1103=⨯=-Kmp=3,p G 为磁钢重 转子轭重 转轴重 传感器转子重的和 3=mp K 为默认情况,可让用户自己指定kg G G G G r g m p 035.0=++=4. 风损W L n D p N mpb 13.01026332=⨯=-5. 机械损耗和铁损W p p p p mpb mpn Fe 29.5=++='6. 考虑到附加损耗后的机械损耗和铁损 W p p 877.63.1='=系数可选 7. 开关管损耗W U I p a 358.12=∆⨯=∆8. 电机总损耗W p p p p Cu 1.15=++=∆∑9. 输入功率W I U P a N 56.461==10. 输出功率W p P P N 46.311=-=∑ 11. 效率%57.67%1001=⨯=P P N η 12. 摩擦转距m N n p T N.00657.056.90== 13. 额定输出转距 m N T T T em .03.002=-=。

无刷直流永磁电动机设计实例一. 主要技术指标1. 额定功率:W 30P N =2. 额定电压:V U N 48=,直流3. 额定电流:A I N 1<3. 额定转速:m in /10000r n N =4. 工作状态:短期运行5. 设计方式:按方波设计6. 外形尺寸:m 065.0036.0⨯φ二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P '直流电动机 W P K P NNm i 48.4063.03085.0'=⨯==η,按陈世坤书。
长期运行 N i P P ⨯''+='ηη321 短期运行 N i P P ⨯''+='ηη431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=27.计算电枢内径m n B A P D N s i i i 23311037.110000255.0110008.048.401.61.6-⨯=⨯⨯⨯⨯⨯=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-⨯= 8. 气隙长度m 3107.0-⨯=δ 9. 电枢外径m D 211095.2-⨯= 10. 极对数p=111. 计算电枢铁芯长 m D L i 221108.2104.12--⨯=⨯⨯='='λ根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-⨯12. 极距 m p D i 221102.22104.114.32--⨯=⨯⨯==πτ 13. 输入永磁体轴向长m L L m 2108.2-⨯==三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22110733.06104.114.3--⨯=⨯⨯==π3.槽形选择梯形口扇形槽,见下图。
小功率永磁无刷直流电动机的设计和仿真研究摘要永磁无刷直流电动机是把电机、电子和稀土材料的高新技术产品发展紧密的结合在一起的新型电机,它具有单位体积转矩高、重量轻、转矩惯量小、控制简单、能耗少和调速性能好等优点,因而在航天航空、数控机床、机器人、汽车、计算机外围设备、军事等领域及家用电器等方面都获得了广泛的应用。
因此,设计性能优异的永磁无刷直流电机具有重要的理论意义和应用价值。
本论文系统的研究了35w小功率永磁无刷直流电机的本体设计,包括设计方法、有限元分析、性能计算、软件仿真等。
本文主要的研究内容如下:1、综述了永磁无刷直流电机的研究现状、存在问题和发展前景,分析了永磁无刷直流电机的基本理论。
2、建立永磁无刷直流电机的数学模型,先利用解析法对该电机进行电磁设计,然后利用有限元法对电机进行优化。
3、基于星形连接三相三状态的控制电路,利用Infolytic公司的MagNet电磁场分析软件建立了永磁无刷直流电机的有限元分析模型,仿真分析其静态气隙磁场分布及动态带负载时的电机特性。
并将软件仿真所得结果与设计计算结果进行比较分析,验证了设计方法的正确性。
关键词:电机设计,无刷直流电动机,有限元分析,稳态特性第一章绪论1.1永磁无刷直流电动机的发展状况永磁无刷直流电动机是一种新型的电动机,其应用广泛,相关技术仍然在不断的发展中,该类电动机的发展充分体现了现代电动机理论、电力电子技术和永磁材料的发展过程。
其中,永磁材料、大功率开关器件、高性能微处理器等的快速发展对永磁无刷直流电动机的进步功不可没。
1821年9月,法拉第建立的世界上第一台电机就是永磁电机,自此奠定了现代电机的基本理论基础。
十九世纪四十年代,人们研制成功了第一台直流电动机。
1873年,有刷直流电动机正式投入商业应用。
从此以后,有刷直流电动机就以其优良的转矩特性在运动控制领域得到了广泛的应用,占据了极其重要的地位。
随着生产的发展和应用领域的扩大,对直流电动机的要求也越来越高。
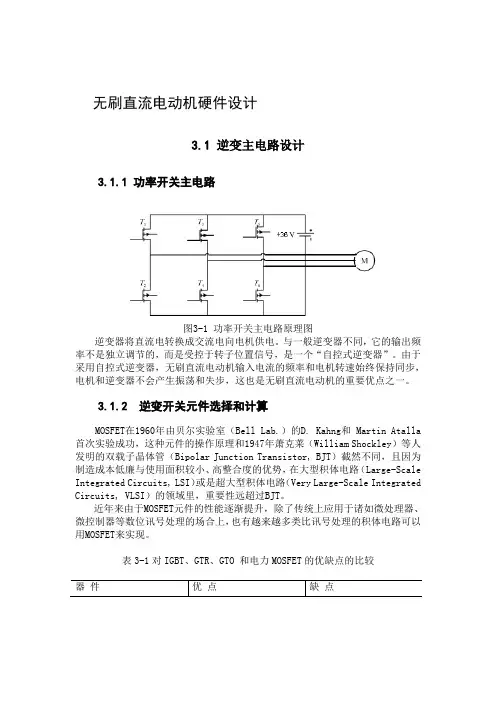
无刷直流电动机硬件设计3.1 逆变主电路设计3.1.1 功率开关主电路图3-1 功率开关主电路原理图逆变器将直流电转换成交流电向电机供电。
与一般逆变器不同,它的输出频率不是独立调节的,而是受控于转子位置信号,是一个“自控式逆变器”。
由于采用自控式逆变器,无刷直流电动机输入电流的频率和电机转速始终保持同步,电机和逆变器不会产生振荡和失步,这也是无刷直流电动机的重要优点之一。
3.1.2 逆变开关元件选择和计算MOSFET在1960年由贝尔实验室(Bell Lab.)的D. Kahng和 Martin Atalla 首次实验成功,这种元件的操作原理和1947年萧克莱(William Shockley)等人发明的双载子晶体管(Bipolar Junction Transistor, BJT)截然不同,且因为制造成本低廉与使用面积较小、高整合度的优势,在大型积体电路(Large-Scale Integrated Circuits, LSI)或是超大型积体电路(Very Large-Scale Integrated Circuits, VLSI)的领域里,重要性远超过BJT。
近年来由于MOSFET元件的性能逐渐提升,除了传统上应用于诸如微处理器、微控制器等数位讯号处理的场合上,也有越来越多类比讯号处理的积体电路可以用MOSFET来实现。
表3-1对IGBT、GTR、GTO 和电力MOSFET的优缺点的比较器件优点缺点IGBT 开关速度高,开关损耗小,具有耐脉冲电流冲击的能力,通态压降较低,输入阻抗高,为电压驱动,驱动功率小开关速度低于电力MOSFET,电压,电流容量不及GTOGTR 耐压高,电流大,开关特性好,通流能力强,饱和压降低 开关速度低,为电流驱动,所需驱动功率大,驱动电路复杂,存在二次击穿问题GTO电压、电流容量大,适用于大功率场合,具有电导调制效应,其通流能力很强 电流关断增益很小,关断时门极负脉冲电流大,开关速度低,驱动功率大,驱动电路复杂,开关频率低电 力 MOSFET 开关速度快,输入阻抗高,热稳定性好,所需驱动功率小且驱动电路简单,工作频率高,不存在二次击穿问题电流容量小,耐压低,一般只适用于功率不超过10kW 的电力电子装置通过上述的比较,我选择MOSFET 。
BLDC无刷直流电动机-设计————————————————————————————————作者:————————————————————————————————日期:摘要序言由于BLDC无刷直流电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。
一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。
其主要类型有同步电动机、异步电动机和直流电动机三种。
由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。
针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的BLDC无刷直流电动机。
经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。
上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为BLDC无刷直流电动机的广泛应用奠定了坚实的基础。
关键字:BLDC,各个领域,发展,高性能ABSTRACTPrefaceDue to a series of advantages of the structure of BLDC brushless DC motor not only has the simple AC motor, reliable operation, convenient maintenance and so on, but also have many advantages of DC motor and high operation efficiency, no excitation loss and good speed performance, the application in various fields of today's national economy growing popularity.More than a century, the motor as an electromechanical energy conversion devices, its application scope has been in every field of the national economy and people's daily life. A synchronous motor, induction motor and DC motor for the three main types of. Because the conventional DC motor adopts brush reversing in a mechanical way, so there are relative mechanical frictions, which brings the cremation, radio interference and noise, short life and other weaknesses,shortcomings coupled with high manufacturing cost and difficult maintenance etc, which greatly limits its scope of application, resulting in the current agricultural and industrial production most adopt the three-phase asynchronous motor.In view of the disadvantages of traditional DC motor, in the early 30's of the last century began to develop in the electronic commutation instead of brush commutation of Brushless DC motor BLDC. After decades of effort, until in the early 60 century finally realized this desire. The last century since the 70's, with the rapid development of power electronics industry, many high performance semiconductor power devices, such as GTR, MOSFET, IGBT, IPM appeared in succession, and the advent of high performance permanent magnetic materials, and laid a solid foundation for wide application of BLDC in Brushless DC motor.Keywords: BLDC, each field, the development of high performance目录摘要 (I)目录 .................................................................................................................................. I I 第1章引言.. (1)1.1设计目的和要求 (1)1.1.1设计的目的 (1)1.1.2设计的要求 (1)1.2设计的主要内容 (1)1.3设计原则 (1)第2章小区环境与住宅情况 (3)2.1 小区的位置与气候 (3)2.2 住宅小区基本情况 (3)第3章住宅小区负荷计算 (4)3.1供配电系统概述 (4)3.2负荷分级及供电要求 (4)3.2.1 负荷分级的相关规范 (4)3.2.2本工程的负荷情况 (5)3.3 电源及高压供配电系统 (6)3.3.1电源的选择 (6)3.3.2根据用户的需求判断 (7)3.3负荷计算 (8)3.3.1住宅小区住户照明用电计算方法 (8)3.3.2其他负荷计算方法 (10)3.3.3详细负荷计算方法 (11)3.3.4其他用电负荷计算 (13)第4章电源配电房设备及发电油机的比较与选择 (15)4.1配电房设备 (15)4.1.1断路器与熔断器 (17)4.1.2直流供电系统 (17)4.2电油机 (18)4.2.1油机发电机组 (18)4.2.2柴油发动机和汽油发动机的比较 (18)4.2.3电动机的启动 (19)4.2.4对双电源切换的要求 (21)4.2.5发电机循环运行时间 (22)第5章电气安全、防雷和接地保护 (24)5.1安全常识 (24)5.2防雷系统的概述、等级和措施 (24)5.2.1防雷系统的概述 (24)5.2.2建筑物的防雷等级 (24)5.2.3高层建筑物的防雷措施 (26)5.3接地系统概述 (29)参考文献 (32)致谢 (33)附录 (34)附表一噪声的标准 (34)附表二变压器进线柜图 (35)附表三配电柜出线图 (36)附表四发电机接线图 (37)附表五配电室接地图 (38)第1章引言1.1设计目的和要求1.1.1设计的目的随着人们对生活环境和品质的不断提高,高科技的发展,电与人们的生活越来越密切相关了。
无感无刷直流电机之电调设计全攻略前 言 (1)1. 无刷直流电机基础知识 (2)1.1 三个基本定则 (2)1. 左手定则 (2)2. 右手定则(安培定则一) (3)3. 右手螺旋定则(安培定则二) (3)1.2 内转子无刷直流电机的工作原理 (3)1. 磁回路分析法 (4)2. 三相二极内转子电机结构 (5)3. 三相多绕组多极内转子电机的结构 (7)1.3外转子无刷直流电机的工作原理 (8)1. 一般外转子无刷直流电机的结构 (8)2. 新西达2212外转子电机的结构 (8)1.4 无刷直流电机转矩的理论分析 (14)1. 传统的无刷电机绕组结构 (14)2. 转子磁场的分布情况 (15)3. 转子的受力分析 (16)4. 一种近似分析模型 (18)1.5 换相与调速 (19)1. 换相基本原理 (19)2. 新西达2212电机的换相分析 (24)3. 调速 (28)2. 无感无刷电调的驱动电路设计 (30)2.1 电池电压监测电路 (30)2.2 换相控制电路 (30)1. 六臂全桥驱动电路原理 (31)2. 功率场效应管的选择 (33)2.3 电流检测电路 (45)2.4 反电势过零检测电路 (49)2.5 制作你自己的电调线路板 (50)3. 无感无刷电调的软件设计 (52)3.1 电流检测 (52)3.2 定时器延时与PWM信号 (53)1. 定时器初始化 (54)2. 定时器T0的溢出中断服务程序 (54)3. 利用T0延时(毫秒极) (54)4. 利用T0延时(微秒极) (55)5. PWM信号的产生 (55)3.3 过零事件检测与电机换相 (56)1. BLMC.h中定义的宏 (56)2. 过零检测与换相代码分析 (59)3.4 启动算法 (63)1. 函数Anwerfen启动流程分析 (63)2. 启动算法机理探究 (65)3.5 上电时的MOSFET自检 (68)1. 函数Delay和DelayM (68)2. 函数MotorTon自检流程分析 (68)3.6 让你的电机演奏音乐 (70)3.7 通信模块 (72)1. PPM解码 (72)2. TWI总线通信 (74)3. 串口通信 (74)4. 指令的收入函数SollwertErmittlung (75)4. 德国MicroKopter项目BL-Ctrl电调程序主程序代码流程分析(V0.41版本) (77)5.1 全局变量列表 (78)5.2 main主函数流程分析 (80)1. 进入while(1)前的准备工作 (80)2. while(1)主循环内容分析 (81)5. 高级话题 (86)5.1 电机的控制模型 (86)5.2 四轴上的校正策略 (87)附录一 (88)附录二 (89)附录三 (93)附录四 (94)前 言关注开源四轴项目也有近一年了,前期都以潜水为主,业余时间主要是在啃那些控制和导航的理论书籍。
无刷直流永磁电动机设计实例一.主要技术指标1. 额定功率:W 30P N =2. 额定电压:,直流V U N 48=3. 额定电流:AI N 1<3. 额定转速: min /10000r n N =4. 工作状态:短期运行5. 设计方式:按方波设计6. 外形尺寸:m065.0036.0⨯φ二.主要尺寸的确定1. 预取效率、63.0='η2. 计算功率 i P '直流电动机 ,按陈世坤书。
W P K P NNm i 48.4063.03085.0'=⨯==η长期运行 Ni P P ⨯''+='ηη321短期运行 N i P P ⨯''+='ηη4313. 预取线负荷m A A s /11000'=4. 预取气隙磁感应强度 T B 55.0'=δ5. 预取计算极弧系数8.0=i α6. 预取长径比(L/D )λ′=27.计算电枢内径m n B A P D N s i i i 23311037.110000255.0110008.048.401.61.6-⨯=⨯⨯⨯⨯⨯=''''='λαδ根据计算电枢内径取电枢内径值 m D i 21104.1-⨯=8. 气隙长度m 3107.0-⨯=δ9. 电枢外径m D 211095.2-⨯=10. 极对数p=111. 计算电枢铁芯长 mD L i 221108.2104.12--⨯=⨯⨯='='λ根据计算电枢铁芯长取电枢铁芯长L= m2108.2-⨯12. 极距 mp D i 221102.22104.114.32--⨯=⨯⨯==πτ13. 输入永磁体轴向长mL L m 2108.2-⨯==三.定子结构1.齿数 Z=62.齿距 mz D t i 22110733.06104.114.3--⨯=⨯⨯==π3.槽形选择梯形口扇形槽,见下图。
无感无刷直流电机之电调设计全攻略前 言 (1)1. 无刷直流电机基础知识 (2)1.1 三个基本定则 (2)1. 左手定则 (2)2. 右手定则(安培定则一) (3)3. 右手螺旋定则(安培定则二) (3)1.2 内转子无刷直流电机的工作原理 (3)1. 磁回路分析法 (4)2. 三相二极内转子电机结构 (5)3. 三相多绕组多极内转子电机的结构 (7)1.3外转子无刷直流电机的工作原理 (8)1. 一般外转子无刷直流电机的结构 (8)2. 新西达2212外转子电机的结构 (8)1.4 无刷直流电机转矩的理论分析 (14)1. 传统的无刷电机绕组结构 (14)2. 转子磁场的分布情况 (15)3. 转子的受力分析 (16)4. 一种近似分析模型 (18)1.5 换相与调速 (19)1. 换相基本原理 (19)2. 新西达2212电机的换相分析 (24)3. 调速 (28)2. 无感无刷电调的驱动电路设计 (30)2.1 电池电压监测电路 (30)2.2 换相控制电路 (30)1. 六臂全桥驱动电路原理 (31)2. 功率场效应管的选择 (33)2.3 电流检测电路 (45)2.4 反电势过零检测电路 (49)2.5 制作你自己的电调线路板 (50)3. 无感无刷电调的软件设计 (52)3.1 电流检测 (52)3.2 定时器延时与PWM信号 (53)1. 定时器初始化 (54)2. 定时器T0的溢出中断服务程序 (54)3. 利用T0延时(毫秒极) (54)4. 利用T0延时(微秒极) (55)5. PWM信号的产生 (55)3.3 过零事件检测与电机换相 (56)1. BLMC.h中定义的宏 (56)2. 过零检测与换相代码分析 (59)3.4 启动算法 (63)1. 函数Anwerfen启动流程分析 (63)2. 启动算法机理探究 (65)3.5 上电时的MOSFET自检 (68)1. 函数Delay和DelayM (68)2. 函数MotorTon自检流程分析 (68)3.6 让你的电机演奏音乐 (70)3.7 通信模块 (72)1. PPM解码 (72)2. TWI总线通信 (74)3. 串口通信 (74)4. 指令的收入函数SollwertErmittlung (75)4. 德国MicroKopter项目BL-Ctrl电调程序主程序代码流程分析(V0.41版本) (77)5.1 全局变量列表 (78)5.2 main主函数流程分析 (80)1. 进入while(1)前的准备工作 (80)2. while(1)主循环内容分析 (81)5. 高级话题 (86)5.1 电机的控制模型 (86)5.2 四轴上的校正策略 (87)附录一 (88)附录二 (89)附录三 (93)附录四 (94)前 言关注开源四轴项目也有近一年了,前期都以潜水为主,业余时间主要是在啃那些控制和导航的理论书籍。
永磁无刷直流电机的设计摘要:永磁无刷直流电机是一种新型电机,其特点是不需要传统的机械电刷,因此在家用电器等领域得到广泛运用。
其简单结构、高可靠性和高效率使其备受青睐。
关键词:永磁无刷直流电机;设计虽然其工作原理与传统的电磁式直流电机相似,但借助高性能的永磁材料和电子控制技术,这种电机在单位体积内能提供较高的转矩,同时转矩惯性比较小,启动时的转矩也很大,此外,其调速特性也相当优越。
因此,在家用电器领域,永磁无刷直流电机得以广泛应用。
1.永磁无刷直流电机的主要特点和应用1.1永磁无刷直流电机的主要特点(1) 由于无电火花和磨损问题,永磁无刷直流电机拥有卓越的工作寿命和高度可靠性。
(2) 其低转动惯量和高转矩惯量比使其具有出色的响应速度。
(3) 通过永磁体产生的气隙磁场,使得电机的效率和功率因数保持在高水平,且发热主要分布在定子上,便于热量散发。
(4) 虽然与有刷直流电机相比略微成本较高,但与异步电机相比,其控制性能卓越。
1.2永磁无刷直流电机的主要应用目前,不断扩大的市场需求迅速推动了永磁无刷直流电机的蓬勃发展。
自上世纪90年代起,随着科技的不断进步,永磁材料的性能得到了显著提升。
尤其以钕铁硼等第三代永磁材料为代表,不仅在耐腐蚀性方面有了巨大突破,其在高温环境下的稳定性也得到了显著提升,同时生产成本也在逐步降低。
许多高校和制造单位都在永磁无刷直流电机的研发中投入了大量资源,为其发展注入了新的活力。
永磁无刷直流电机的功率范围广泛,从毫瓦级到数十千瓦级不等,为用户提供了多样的选择。
2.无刷直流电机的结构及工作原理2.1无刷直流电机的基本结构无刷直流电机的基本组成结构包括电机本体、转子位置传感器和电子换相电路,具体如图2.1所示。
图2.1永磁无刷直流电机系统的组成结构示意图无刷直流电机的结构类似于永磁同步电机,其核心部分是电机本体,是实现机电能量转换的核心。
因此,其设计在确保整个系统可靠运行方面具有关键性作用。
新能源汽车永磁无刷直流电机本体结构设计摘要伴随着汽车产业的高速发展,石油资源短缺,环境污染和气候变暖等一系列问题已经凸显出来。
以纯电动汽车为代表的新能源汽车必将成为汽车发展的主要研究方向。
而驱动电机作为纯电动汽车唯一的动力源,其性能好坏将直接影响整车运行的动力性、稳定性和续驶里程。
因此设计一款能够满足电动汽车安全行驶,并具有宽范围高效区的驱动电机具有重要意义。
本文首先对新能源汽车所需要的驱动电机的类型进行了选择和对比。
在确定选用永磁无刷直流电机之后,又对永磁无刷电机的工作原理进行了阐述。
接着简单的介绍了直流无刷电机本体的大致结构。
然后选取了一款合适的电机,并且获得了点机的参数。
然后进行了对电机的基本尺寸的计算和电磁部分、定子绕组部分的计算,从而得到了设计基本体结构所需要的主要参数,完成了本次对于电机本体结构的设计。
关键词:新能源汽车;永磁无刷直流电机;电机的基本尺寸;磁路计算;定子绕组Structure design of permanent magnet brush less DC motor fornew energy vehicleABSTRACTAlong with the rapid development of automobile industry, the shortage of oil resources, a series of problems of environmental pollution and climate warming has been prominent. YISHION electric vehicles as the representative of the new energy vehicles will become the main research direction of car development. While the driving motor as a pure electric vehicle only one power source, its performance will directly affect the vehicle power operation, stability and driving range. So design a can meet the electric vehicle safety driving, driving motor is important and has a wide high efficiency range.Type of drive motor based on the new energy vehicles needed were selected and compared. After determining the use of magnet brush less DC motor, and the working principle of permanent magnet brush less motor are expounded. Then simply introduces the general structure of the brush less DC motor. Then choose a suitable the motor, and then click the parameters. The basic dimensions of the motor and electromagnetic calculation, calculation of stator winding the pivot part, so as to get the main parameters of basic structure need, completed the structure of motor body design.Key words: new energy vehicle; permanent magnet brush less DC motor; basic dimensions of motor; magnetic circuit calculation; stator winding目录1前言 (1)1.1新能源汽车发展的历史背景 (1)1.2国内外新能源汽车的发展 (1)1.3本文研究的主要内容 (2)2电机类型的选择 (3)2.1直流无刷电机和有刷电机的对比 (3)2.2直流无刷电机本身的特点 (3)2.3直流无刷电机的工作原理 (3)3直流无刷电机本体结构介绍 (5)4电机本体设计参数计算和材料选择 (6)4.1设计任务 (6)4.2电机基本尺寸的计算 (6)4.5数据总结 (11)5基于ANSYS的直流无刷电机模态分析 (13)5.1模态分析基础 (13)5.2电机模态分析 (13)6总结 (15)附录 .................................. 错误!未定义书签。
电机与拖动基础课程设计报告设计题目:学号:指导教师:信息与电气工程学院二零一六年七月直流无刷电机本体设计1. 设计任务(1) 额定功率80N P W = (2) 额定电压310N U V ≤(3) 电动机运行时额定转速1000/min N n r = (4) 发电机运行时空载转速max 6000/minn r = (5) 最大允许过载倍数 2.5λ=(6) 耐冲击能力21500/m a m s =(7) 机壳外径42D mm ≤设计内容:1. 根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子铁心内径、铁心长度等。
2. 磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。
3. 定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。
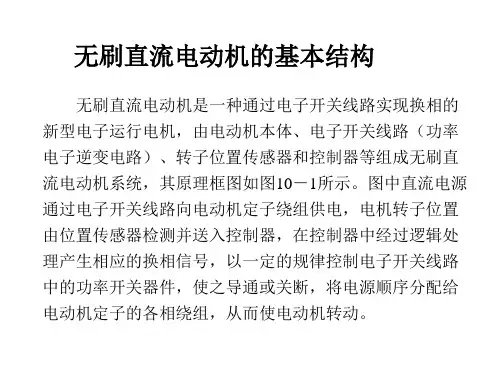
2. 理论与计算过程2.1 直流无刷电机的基本组成环节直流无刷电动机的结构原理如图2-1-1所示。
它主要由电机本体、位置传感器和电子开关线路三部分组成。
电机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,……)组成。
图中的电机本体为三相电机。
三相定子绕组分别与电子开关线路中相应的功率开关器件连接,位置传感器的跟踪转子与电动机转轴相连接。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
因此,所谓直流无刷电机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电机以及位置传感器三者组成的“电动机系统”。
其原理框图如图2-1-2所示。
图2-1-1 直流电动机的工作原理图图2-1-2 直流无刷电机的原理框图 直流电源 电动机位置传感器开关电路电机转子的永久磁钢与永磁有刷电机中所使用的永久磁钢的作用相似,均是在电机的气隙中建立足够的磁场,其不同之处在于直流无刷电机中永久磁钢装在转子上,而直流有刷电机的磁钢装在定子上,图2-1-3示出了典型直流无刷电机本体基本结构图。
图2-1-3 直流无刷电机基本结构图直流无刷电机电子开关线路是用来控制电动机定子上各相绕组通电的顺序和时间,主要由功率逻辑开关单元和位置传感器信号处理单元两个部分组成。
功率逻辑开关单元是控制电路的核心,其功能是将电源的功率以一定逻辑关系分配给直流无刷电机定子上各相绕组,以便使电机产生持续不断的转矩。
而各相绕组导通的顺序和时间主要取决于来自位置传感器的信号。
但位置传感器所产生的信号一般不能直接用来控制功率逻辑开关单元,往往需要经过一定逻辑处理后才能去控制逻辑开关单元,综上所述,组成直流无刷电机各主要部件的框图,如图2-1-4所示。
图2-1-4 直流无刷电机的组成框图2.2 直流无刷电机的基本工作原理众所周知,一般的永磁式直流电机的定子由永久磁钢组成,其主要的作用是在电机气隙中产生磁场。
其电枢绕组通电后产生反应磁场。
由于电刷的换向作用,使得这两个磁场的方向在直流电机运行的过程中始终保持相互垂直,从而产生最大转矩而驱动电动机不停地运转。
直流无刷电机为了实现无电刷换相,首先要求把一般直流电机的电枢绕组放在定子上,把永磁磁钢放在转子上,这与传统直流永磁电机的结构刚好相反。
但仅这样做还是不行的,因为用一般直流电源给定子上各绕组供电,只能产生固定磁场,它不能与运动中转子磁钢所产生的永磁磁场相互作用,以产生单一方向的转矩来驱动转子转动。
所以,直流无刷电动机除了由定子和转子组成电机本体以外,还要由位置传感器、控制电路以及功率逻辑开关共同构成的换相装置,使得直流无刷电机在运行过程中定子绕组所产生的的磁场和转动中的转子磁钢产生的永磁磁场,在空间始终保持在(π/2)rad左右的电角度。
下面以图2-1-1所示电路对直流无刷电机工作过程作简要说明。
设三相桥式逆变器采用“120°导通型”通断规律。
即:每隔1/ 6周期(60°电角度)换相一次,每次换相一个功率管,每一功率管导通120°电角度。
各功率管的导通顺序是V1V2、V2V3、V3V4、V4V5、V5V6、V6V1、…。
当功率管V1和V2导通时,电流从V1管流入A相绕组,再从C相绕组流出,经V2管回到电源。
如果认定流入绕组的电流所产生的转矩为正,那么从绕组流出所产生的转矩则为负,它们合成的转矩如图2-2-1(a)所示,其大小为3Ta,方向在Ta和-Tc的角平分线上。
当电机转过60°后,由V1V2通电换成V2V3通电。
这时,电流从V3流入B相绕组再从C相绕组流出,经V2回到电源,此时合成的转矩如图2-2-1(b)所示,其大小同样为3Ta。
但合成转矩Tbc 的方向转过了60°电角度,而后每次换相一个功率管,合成转矩矢量方向就随着转过60°电角度,但大小始终保持3Ta不变。
图2-2-1(c)示出了全部合成转矩的方向。
图2-2-1 定子绕组在空间合成转矩矢量图(a)V1、V2导通时合成转矩;(b)V2、V3导通时合成转矩;(c)两两通电时合成转矩矢量图所以,同样一台直流无刷电机,每相绕组通过与三相半控电路同样的电流时,采用三相星形(Y)联结全控电路,在两两换相的情况下,其合成转矩增加了3倍。
每隔60°电角度换向一次,每个功率管通电120°,每个绕组通电240°,其中正相通电和反相通电各120°,其输出转矩波形如图2-2-2所示。
由图2-2-2可以看出,三相全控时的转矩波动比三相半控时小得多。
图2-2-2 全控桥输出波形图如将三只霍尔传感器按相位差120°安装,则它们所产生的波形如图2-2-3所示。
图2-2-3 各相绕组的导通示意图2.3 直流无刷电机设计的基本步骤(1)根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子铁心内径、铁心长度等。
(2)磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。
(3)定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。
在设计时既要保证电动机运行可靠、性能优良、效率高和寿命长,又要体积小、重量轻、材料省、加工方便,很多因素是相互矛盾和相互制约的。
对设计的要求是 全面考虑,统筹兼顾,全面落实技术经济指标。
2.4 主要尺寸的选择(1) 定子铁心内径的选择直流无刷电机的转子外径Da (由于直流无刷电机气隙一般很小,为简化问题,就认为转子外径等于定子内径)一般随单位转速的输出功率P 值增加而增大,当电机的单位转速输出功率P 相同时,其Da 大致一样。
决定Da 时,可根据给定的P 值并结合工厂的生产条件,参考已制成的类似电机的Da 值而选定。
我国目前制造的直流电机,其Da 与输出功率P 的关系曲线如图2-4-1所示,它可以作为选定Da 的初步依据。
图2-4-1 定子内径Da 与单位转速输出功率PN/nN 的关系根据已知条件计算得41800.810[kW (r/min)]n 1000N N P --==⨯ (1)从图2-4-1的曲线对比,取Da=3.4cm=34mm 。
(2) 电磁负荷的选择42N D a a δ6.110P k D L BA nαη⨯= (2) 式中Da ——定子铁心内径(cm );La ——定子铁心长度(cm );kD ——考虑电机内部压降等因素影响的小于1的系数;PN ——额定功率(W );B ——磁负荷(T);A ——电负荷(A/cm );δα——极弧系数;η——电机效率;n ——电机额定转速(r/min )。
由式(2)可知,电负荷A 与磁负荷B 的选择与电动机的主要尺寸直接相关。
同时,A 、B 的数值与电动机的运行性能和使用寿命也有密切关系,因此必须全面考虑各方面因素,才能正确选择A 、B 的数值。
一般来说,选用较高的磁负荷B 可以节约有效材料、缩小电机体积。
但是B 过高会产生以下一些不利影响:1)将增加转子和定子铁心饱和程度,特别是定子齿中的饱和更为强烈,于是空气隙及电动机定子磁路所需的磁感应强度增高,势必要求高性能的磁钢和导磁材料,其价格随之上升。
2)因为单位体积的铁耗近似地与铁内磁感应强度的平方成正比,所以B 的增大将使电机的铁耗增加,导致电机的效率降低,同时也使电机的温升增高。
同样,选用较高的电负荷A 也可以节约有效材料、缩小电机体积。
但是A过高会产生以下一些不利影响:1)定子绕组的去磁作用的影响比较显著,导致工作特性变差。
2)在定子绕组电流密度不变的条件下,这将增加定子槽内导线,从而增加了定子绕组的用铜量、铜耗和温升。
电机的电负荷A和磁负荷B与定子内径Da有关,根据已生产电机的经验数据可以绘制成曲线,作为设计时参考。
图2-4-2和图2-4-3分别表示B级绝缘直流电机的A、B的经验值和Da的关系。
由Da=3.4cm,根据图2-4-2和图2-4-3预取A=130A/cm,B=0.6T。
图2-4-2 电负荷A与定子内径Da的关系图2-4-3 磁负荷B 与定子内径Da 的关系(3) 定子铁心长度L 的确定从式(2),可以得到转子磁钢计算长度La 的表达式为4ND a 2δa 6.110P k L BAD nαη⨯= (3)图2-4-4 计算极弧系数δα与转子外径Da 的关系由Da=3.4cm ,根据图2-4-4,参考以往经验值,预取δα=0.9。
预取系数0.8D k =,效率0.7η=,根据式(3)计算得La=6.8cm 。
所以,铁心长度L=La=6.8cm 。
(4) 转子长度与直径的比值λ从式(2)可以看出,在同样给定条件和选定的A 、B 和δα数值下,2a a D L 是一定的。
因此,如果把Da 选得大一些,La 必定小一些,电机就比较粗短;反之,如果把Da 选得小一些,La 必定大一些,电机就比较细长。
电机的这个几个形状关系可用电动机计算长度与定子内径的比值来表示:a aL D λ= (4) 由Da=3.4cm ,La=6.8cm ,代入式(4)计算得a a 2L D λ==。
(5) 定子铁心外径的选择由定子铁心内径Da=3.4cm=34mm ,技术要求机壳外径42D mm ≤,根据表1可以选择定子铁心外径D1=36.8mm=3.68cm 。
2.5 磁路计算(1) 极数的选择我们已知δa a 2πp BL D αΦ=,在转子外径、长度和气隙磁感应强度确定后,沿定子圆周的总磁通Φ为一定值。
增加极对数p ,可减少每级磁通,定子轭及机座的截面积可相应减少,从而减少电机的用铁量;定子绕组的端接部分将随极数增加(即极距减小)而缩短,在同样的电流密度下,绕组用铜量也将减少;磁极增多后,定子绕组电感相应减少,这将有利于电子器件换相。