灰度重心法提取激光条纹中心线
- 格式:docx
- 大小:3.64 KB
- 文档页数:3
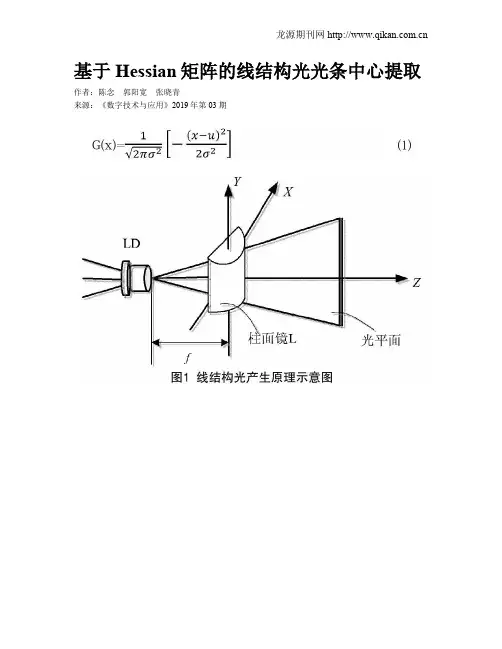
基于Hessian矩阵的线结构光光条中心提取作者:陈念郭阳宽张晓青来源:《数字技术与应用》2019年第03期摘要:本文以傳统的Steger算法为前提,对基于Hessian矩阵的光条纹中心提取算法进行了优化,并通过实验验证了光条中心提取的效果。
关键词:线结构光;图像预处理;Steger算法中图分类号:TP39 文献标识码:A 文章编号:1007-9416(2019)03-0126-020 引言通过激光三角法拍摄的光条图像一般都具有一定的像素宽度。
为实现准确的测量,需要提取条纹中心线。
目前使用较多的激光条纹中心提取算法有极值法、灰度重心法、骨架细化法、方向模板法、曲线拟合法等[1-4],但以上方法都有一定的缺陷。
本文提出一种基于Steger算法的光条纹中心提取方法。
1 线激光光条图像的特点线激光器发射一个连续的光平面与待测物表面的交线是有一定宽度的光条,该光条的横截面光强分布近似服从高斯分布[5],如图1所示。
G(x)=; ; ; ; ; ; ; ; ; ; ; ; ; ; ;(1)式中u为数学期望,σ为均方差。
光条图像及灰度强度分布如图2所示,光条区域的灰度值近似呈高斯分布。
2 光条图像的预处理相机所拍摄的光条图像包含了许多噪声,且发生了变形,光条强度受到了调制,给光条中心提取增加了困难[6]。
因此,在提取激光光条中心前需对光条图像进行以下预处理:2.1 光条区域提取本文采取的方法是在原始图像中设定一个包含所需激光光条图像的较小的矩形区域,然后将该矩形区域的图像分离出来,大大减小了计算量。
2.2 图像滤波由于光条图像受测量环境、相机内部产生的热噪声等因素的影响,严重影响光条提取结果及测量系统的准确性。
经对比,中值滤波效果较好。
但滤波后使部分光条图像信息被滤除掉了。
为了保证信息的完整性,需对滤波后的图像再次进行形态学滤波,如图3所示。
3 Steger法提取光条纹中心线通过Hessian矩阵得到光条法线方向,利用泰勒展开得到激光条纹的中心点的亚像素位置[7]。
第31卷第1期 2014年3月 广东工业大学学报JournalofGuangdongUniversityofTechnology Vol.31No.1 March2014收稿日期:2013-03-01基金项目:国家自然科学基金资助项目(51105078);广东省教育部产学研结合项目(2012B091100190);东莞市高等院校科研机构科技计划项目(201010810205);广州市科技计划项目(2013J4300019)作者简介:杨建华(1985-),男,硕士研究生,主要研究方向为逆向设计与工程应用、机器视觉与三维测量.doi:10.3969/j.issn.1007-7162.2014.01.015线结构光三维视觉测量中光条纹中心提取综述杨建华,杨雪荣,成思源,雷志盛,骆少明,张湘伟(广东工业大学机电工程学院,广东广州510006)摘要:光条纹中心提取是线结构光三维视觉测量中的关键技术.把影响光条纹中心提取精度的主要因素归纳为工作环境、激光平面、被测物体和图像采集系统,并对其进行了对比分析.根据提取算法的理论基础、对图像信息的利用及计算思路特点的差异,将其分为几何中心方法和能量中心方法两大类.针对每类方法的计算思路、优缺点、改进方法、适用工况等在细分类方法中进行了对比分析和归纳总结.最后结合两大类方法的发展特点,提出了光条纹中心提取方法的进一步发展方向.关键词:三维视觉测量;线结构光;光条纹;中心提取中图分类号:TP391.4;TN247 文献标志码:A 文章编号:1007-7162(2014)01-0074-05ReviewofExtractingtheCentersofLinearStructuredLightStripesfor3DVisualMeasurementsYangJian-hua,YangXue-rong,ChengSi-yuan,LeiZhi-sheng,LuoShao-ming,ZhangXiang-wei(SchoolofElectromechanicalEngineering,GuangdongUniversityofTechnology,Guangzhou510006,China)Abstract:Extractingthecenterofalightstripeisoneofthekeytechniquesofthelinearstructuredlightforthree-dimensional(3D)visualmeasurement.Accordingtotheinfluenceoftheaccuracyinextractingthelightstripecenters,thefourkeyfactors,whicharetheworkenvironment,laserplanes,measuredob-jectsandimageacquisitionsystems,aresummedupandanalyzed.Onthebasisofthedifferencesbe-tweentheuseoftheimageinformationandthecharacteristicsofthecalculatedalgorithmsintheextractionmethods,anewideaisproposedthattheyareclassifiedintotwodifferentmethods,whicharethegeomet-ricalcentermethodandtheenergycentermethod.Basedonthedifferencesbetweenthetwomethodsinalgorithmthoughts,meritsanddemerits,waysofimprovement,applicableconditions,theyaresubclassi-fied,compared,analyzedandsummarized.Atlast,withthedevelopingfeaturesofthetwomethodscom-bined,itproposesthedevelopmenttrendofthelightstripeextractionmethod.Keywords:3Dvisualmeasurement;linearstructuredlight;lightstripe;extractingthecenter 线结构光三维视觉测量是基于光学三角法测量原理的一种非接触式测量,具有测量速度快、精度高,结构简单、经济且易于实现等优点,在工业测量和检测、医学、工程设计、逆向工程等领域得到了越来越广泛的应用[1].其测量原理是首先将激光器发出的激光光束通过柱面镜展成为一个连续的激光平面,用它来照射被测物体,与被测物体表面相交形成一条变形结构光条纹;然后利用CCD摄像机拍摄到的变形结构光条纹的图像几何信息,结合测量时系统运动参数来提取被测物体表面的三维形貌几何信息.其中,对变形结构光条纹图像的处理和计算,是三维测量的关键环节之一.由于变形结构光条纹一般具有3~12个像素宽度,而光条纹中心线上点的位置坐标才是测量所需的最准确的信息,所以必须对变形结构光条纹进行光条纹中心提取,因此,光条纹中心提取的精度直接决定了测量结果的精度.1 光条纹中心提取精度的影响因素国内外很多学者紧紧地围绕如何提高光条纹中心的提取精度和算法速度进行了大量的实验研究和工程实践,通过及应用不同的算法研究并取得了相应的成果,在指导实际工程应用方面发挥了不同的作用,其依据的结构光视觉的基本测量原理如图1所示,实验中拍摄的实物模型的变形结构光条纹如图2所示.图1 线结构光测量原理Fig.1 Principleoflinearstructuredlightmeasurement图2 实物模型的变形结构光条纹Fig.2 Structuredlightstripesofobjectmodel 噪声对光条纹提取的精度有较大影响,在对光条纹图像进行处理时首先要进行去噪处理,所以对影响光条纹中心提取精度的主要因素进行了总结分析和对比研究.结合杨雪荣等[2]和解则晓等[3]对光条纹中心提取影响因素的分析,可将其总结并概括为表1.表1 主要影响提取精度的因素Tab.1 Maininfluencefactorsoftheextraction影响因素噪声来源噪声类别降噪、除噪方法工作环境环境光(折射光、漫反射光、白炽灯光)随机噪声(无法估量、无法彻底消除)提高激光器功率、设计封闭式采集、选用特定波段的激光光源和滤色镜等激光平面平面度、“厚度”、光强变化可消除噪声(有规律、可重复)滤波处理、选用性能稳定的激光光源等被测物体表面性质、材质随机噪声喷涂吸光材料、改变光照角度等图像采集系统图像采集卡、CCD内部噪声随机噪声、热电噪声、白噪声图像滤波处理、独立分割光条纹特征再处理等 表1中根据测量时的系统组成和测量原理将影响提取精度的因素分成4大类,针对每类的噪声来源、噪声类别及其是否可消除、避免噪声方法及措施进行了对比分析.针对这些噪声影响因素的研究以及结合数字图像处理和计算机视觉领域的新发展,很多学者提出了独特的光条纹中心提取算法.从实现方法上分析,可将现有的光条纹提取技术归结为两大类:以几何中心作为光条纹中心的提取方法和以能量中心作为光条纹中心的提取方法.2 光条纹中心的几何中心提取法此类方法又简称为几何中心方法.它是从数字图像处理的图像分割理论发展而来,其基本思路是首先对光条纹进行边缘检测,然后利用提取的光条纹两条边缘线的几何关系或阈值信息来求取光条纹的几何中心线,作为光条纹的中心线.从计算依据的信息和算法不同,几何中心法可分成以下3类.2.1 利用边缘信息的提取方法此方法主要利用特征检测分割出的两条光条纹区域边缘线,从计算几何角度提取光条纹中心线.这类方法是最早用来实现结构光条纹中心线提取的主要方法,最先实现的传统边缘法(又称轮廓法)只是简单地将两条边缘线中的某一条替代作为光条纹中心线,后来进行改进发展的中线法(又称中心法)是提取两条边缘线的中线作为光条纹中心线[4].表2列出了两种方法的特点.表2 边缘法与中线法的特点Tab.2 Characteristicsofedge-methodandcenterline-method名称特点边缘法①取光条纹内或外边缘线作为中心线②适用于精度要求不高的大型物体测量③要求图像质量较好且结构光特性较高中线法①取光条纹内外边缘线的中线作为中心线②适用条纹质量好且形状规则的物体测量③实现简单且避免判断内外边缘轮廓线57 第1期 杨建华,等:线结构光三维视觉测量中光条纹中心提取综述 在运用两种方法的过程中,物体模型表面复杂并带有细微特征以及光条纹不规范,常常使提取的中线出现“分枝”;由于遮挡等原因造成光条纹出现缺失或断线,这些都会产生测量误差.据此,黎明等[5]提出一种利用光强信息进行修正的中线法,利用表面光强分布信息与表面法线方向关系采用逐次逼近的计算方法修正带有误差的中线轮廓,使得算法精度得到进一步提高.2.2 利用阈值信息的提取方法此方法假设在理想的结构光条纹特性和被测物体表面质量相同的条件下,提取阈值分割后光条纹横截面中一对阈值分割点的中点位置作为光条纹中心点.该方法称为灰度阈值法(又称门限阈值法),具有计算速度快,简单等特点.由于受阈值分割和噪声影响大而使得提取精度差,它只适用于对光条纹中心位置的粗略估计.针对激光散斑效应噪声影响较为严重的问题,贾波等[6]采用了图像多帧平均法,虽然有效地去除了噪声,但是由于它将同时处理到几帧图像,造成计算数据量较大,处理速度缓慢,不适合也不利于工程应用.2.3 利用细化技术的提取方法此方法利用细化技术得到光条纹区域的细化曲线来替代光条纹中心线,称为形态学骨架法(又称骨架细化法).骨架是图像几何形态的重要拓扑结构描述,保持了原目标的拓扑性质,具有原目标相同的特征,可用来表征一个光条纹的中心线特征.细化过程就是重复地剥掉二值图像的边界像素,直到获得一条单像素宽的光条纹连通线(称为骨架)的过程.将形态学处理引入光条纹中心提取是一个重要的算法推广,但是由于单纯提取的骨架没有考虑到光条纹的横截面光强特性,使得提取的光条纹中心线精度不高.同时在迭代腐蚀边界像素时必须保持目标的连通性而不能改变图像的拓扑性质,而需要进行多次细化操作,使得提取算法的运算速度降低.3 光条纹中心的能量中心提取法此类方法又简称为能量中心方法,它是在对激光光束的光学分析、结构光光条纹的形成原理和灰度特性分析的基础上发展形成的.其基本计算思路是求取光条纹横截面上理想的光强高斯分布曲线的灰度重心点或灰度极大值点作为光条纹的中心点,然后连接点集或拟合成高次曲线得到光条纹的能量中心线,作为光条纹的中心线.目前,对提取光条纹能量中心的方法研究一直是热门话题,现有方法可综合分成以下3类.3.1 利用灰度重心的提取方法此方法是直接依据光条纹在每一行横截面区间内灰度值的排列,沿行坐标方向求取光条纹区域的灰度重心点来代表该截面的光条纹中心点位置.该方法减小了由于光条纹灰度分布的不均匀性而引起的误差,提高了提取精度.但由于在光条纹截面中参与计算的像素点数不同及噪声干扰影响,导致了中心点位置计算结果出现沿行坐标方向的偏移误差.针对在处理得到灰度重心点之前的噪声干扰、图像预处理方法等方面,以及如何得到更加逼近实际的灰度重心点等方面,很多学者进行了有针对性的分析和研究,表3列出了与此相关的改进方法[2,7-10].在表中针对改进因素的不同方式或途径进行分别对比,从采用的理论基础和算法特点两个方面进行了分析.3.2 利用方向模板技术的提取方法此方法又称为可变方向模板法(简称方向模板法),主要针对光条纹图像进行低通滤波除噪和平滑处理后而引起损失物体表面几何细节信息的缺点,提出采用“有效尺寸”为5×3的4种不同方向模板与光条纹图像进行卷积运算,直接提取光条纹中心.最初由胡斌等[11]提出,它是从利用灰度重心提取方法的思想发展而来的.该方法具有与采用固定模板卷积一样的抗白噪声和一定断线修补能力,较好地保留了光条纹的细节信息;但是在更高精度的要求下仅仅选取4个方向的模板不再能够满足要求,但如果增加其他不同方向模板又会增加计算量和运算时间,影响处理效率.据此,雷海军等[12]在运用可变方向模板法之前结合光条纹像素的灰度邻域属性利用灰度阈值分割出光条纹,如此可快速检测和精确定位光条纹中心,同时数据存储量小有利于硬件并行实现.此外,吴庆阳等[13]将可变方向模板技术和细化技术相结合,在细化的骨架上利用可变方向模板判断光条纹的法线方向,再利用灰度重心方法可提取光条纹中心,这样充分地发挥了两种方法的优点.3.3利用极大值点的提取方法此方法主要将光条纹中横截面光强极大值点作为光条纹中心点.该方法在光条纹横截面的灰度布成理想高斯分布的情况下具有很好的提取效果,而且提取速度极快.但由于受到噪声干扰,光条纹横截面的灰度分布曲线不能完全构成理想高斯曲线,因此该方法不适用于信噪比较小的图像.近年来以该67 广 东 工 业 大 学 学 报 第31卷 方法为基础,许多研究者又提出了改进方法[14-15],如表4所示.表中将改进方法分成对噪声影响和极值点寻找两个大方向,对改进方法的核心思想及特点进行了对比分析.表3 灰度重心法的改进方法Tab.3 Improvementofthebarycentermethod针对性或改进因素方法名称理论基础特点灰度重心点提取的偏移误差和曲面调制误差自适应迭代法系统量传递理论偏态分布重心特性基本消除光条纹调制误差,可用于快速精密测量灰度重心点提取对光强分布不均匀的敏感性自适应阈值法阈值分割算法浮动阈值特性去除某些随机噪声以及激光散斑效应的干扰影响边界灰度阈值选取对灰度重心点提取的影响梯度重心法灰度梯度特性灰度非正态分布特性克服灰度分布不匀称良好的抗噪性和鲁棒性光条纹法线方向上灰度重心点的计算偏差全分辨率法灰度梯度特性Bazen方法兼顾光条纹延伸方向影响因素、适用于在线精确测量光条纹法线方向和灰度重心点的判别封闭光圈(光带)法基准坐标变换模板校正算法计算精度高但计算数据量大、速度慢、应用实时性差噪声干扰对灰度重心点提取的影响NURBS曲线插值法NURBS曲线的局部控制特性、插值运算方法降低噪声影响、重复计算精度稳定性好B样条迭代法B样条曲线特性迭代算法逐步迭代修复噪声影响、提高提取精度遗传优化法遗传算法图像分割阈值特性增强抗白噪声能力实现断线的修补可变形模型法可变形模型理论B样条曲线特性有效抑制噪声影响实现断线的修补感兴趣区域(ROI)分割法最大类间方差法阈值分割特性提高处理速度、增强光照下抗漫反射能力和分割特性表4 极大值点法的改进Tab.4 Improvementofthemaximumpoint-valuemethod针对性改进方法特点干扰噪声影响从极值点向两边缘方向搜索到相同阈值阈值对等更精确,运算时间增长寻找极大值点(最小二乘法)高斯曲线拟合或二次抛物线拟合曲线拟合理论成熟,提取精度达亚像素级Steger的Hessian矩阵法(曲线求导理论)精度高、鲁棒性好,运算量较大胡坤的改进Steger法(采用固定像素框或递归滤波)极大减少运算量,实现矩阵快速运算基于ROI分割的胡坤法的改进极大提高运算速度适合实时应用4 总结如前所述,直接地利用光条纹区域的几何关系与阈值信息求取光条纹的几何中心线,就是以几何中心作为光条纹中心的提取方法.实现该类方法的关键点是在于如何得到更加合理的每个光条纹横截面的几何中心位置对应点.针对当前的工程应用领域来说,这种典型方法已经逐渐发展成熟并得到广泛的应用.在受工况环境和噪声影响少、结构光性能好、物体特征或曲面相对简单以及对测量结果精度要求不高的情况下均能满足;在工况环境恶劣并伴有多种噪声、结构光性能不很稳定、物体特征复杂以及对测量结果精度要求较高的情况下一般不能满足而均采用能量中心方法进行光条纹中心提取.充分地利用光条纹区域的灰度信息特性并结合高斯分布原理求取光条纹的能量中心线,就是以能量中心作为光条纹中心的提取方法.从求取几何中心到求取能量中心的发展是从仅仅考虑光条纹的几何形态特性到综合分析光条纹自身灰度特性的发展,是从表象到本质的发展.因此,能量中心提取方一直是当前研究热点,很多学者结合数字图像处理和计算机视觉领域发展的新理论新算法以及一些先进的优化方法,来尝试应用于光条纹中心的提取.由于在进行光条纹中心提取的过程中,对整幅77 第1期 杨建华,等:线结构光三维视觉测量中光条纹中心提取综述 光条纹图像的每一步处理操作都密切关系到光条纹中心的提取精度和运算速度,因此更加合理的图像去噪预处理、更加精确的光条纹分割方法、更贴合光条纹横截面光强实际分布特性的灰度信息处理等都是对提取算法发展的重要方向.参考文献:[1]ChangDY,ChangYM.Afreeformsurfacemodelingsystembasedonlaserscandataforreverseengineering[J].TheInternationalJournalofAdvancedManufacturingTechnolo-gy,2002,20(1):9-19.[2]杨雪荣,张湘伟,成思源,等.基于可变形模型的光条纹中心提取方法研究[J].中国机械工程,2009,20(03):334-337.YangXR,ZhangXW,ChengSY,etal.Researchonthemethodforextractingthecentreoflightstripebasedonde-formablemodel[J].CMES,2009,20(03):334-337.[3]解则晓,张成国,张国雄.基于B样条迭代法的激光光条噪声去除技术研究[J].光学技术,2005,31(3):430-433.XieZX,ZhangCG,ZhangGX.ResearchonremovingthenoiseonthelaserstripebasedontheiterativefittingofB-spline[J].OpticalTechnique,2005,31(3):430-433.[4]LyversEP,MitchellOR.Sub-pixelmeasurementsusingamomentbasededgeoperator[J].IEEETransonPAMI,1989,11(12):1293-1309.[5]黎明,冯华君,徐之海,等.利用光强信息的结构光图像轮廓提取修正方法[J].光电工程,2005,32(2):30-32.LIM,FengHJ,XuZH,etal.Profileextractionofstruc-turallightimageanditscorrectionbasedonlightintensity[J].Opto-ElectronicEngineering,2005,32(2):30-32.[6]贾波,苏显渝,郭履容.采用激光光刀的叶片三维面形测量方法[J].中国激光,1992,19(4):271-275.JiaB,SuXY,GuoLR.3-Dmeasurementofturbinebladeprofilebylightknife[J].ChineseJournaloflasers,1992,19(4):271-275.[7]OtsuN.Athresholdselectionmethodfromgray-levelhisto-grams[J].IEEETransSystems,ManandCybemetics,1979,9(1):62-66.[8]SeokbaeSon,HyunpungPark,LeeKwanH.Automatedla-serscanningsystemforreverseengineeringandinspection[J].InternationalJournalofMachineToolsandManufac-ture,2002,42(8):889-897.[9]BazenAM,GerezSH.Systematicmethodsforthecomputa-tionofthedirectionalfieldsandsingularpointsoffinger-prints[J].IEEETransactionsonPatternAnalysisandMa-chineIntelligence,2002,24(7):905-919.[10]张万江,许敏.基于结构光视觉的激光拼焊焊缝质量检测方法研究[J].仪表技术与传感器,2012,(7):156-158.ZhangWJ,XuM.Seamqualityinspectionoflaserweldingbasedonstructuredlightvision[J].InstrumentTechniqueandSensor,2012(7):156-158.[11]胡斌,李德华,金刚,等.基于方向模板的结构光条纹中心检测方法[J].计算机工程与应用,2002,38(11):59-60,109.HuB,LiDH,JinG.Newmethodforobtainingthecenterofstructuredlightstripebydirectiontemplate[J].Comput-erEngineeringandApplications,2002,38(11):59-60,109.[12]雷海军,李德华,王建永,等.一种结构光条纹中心快速检测方法[J].华中科技大学学报:自然科学版,2003,31(1):74-76.LeiHJ,LiDH,WangJY.Amethodfordetectingthecenterofstructuredlightstripe[J].JHuazhongUnivofSci&Tech:NatureScienceEdition,2003,31(1):74-76.[13]吴庆阳,苏显渝,李景镇,等.一种新的线结构光光带中心提取算法[J].四川大学学报:工程科学版,2007,39(4):151-155.WuQY,SuXY,LiJZ,etal.Anewmethodforextrac-tingthecentre-lineoflinestructurelight-stripe[J].Jour-nalofSichuanUniversity:EngineeringScienceEdition,2007,39(4):151-155.[14]StegerC.Anunbiaseddetectorofcurvilinearstructures[J].IEEETransactionsonPAMI,1998,20(2):113-125.[15]IzquierdoMAG,SanchezMT.Sub-pixelmeasurementof3Dsurfacesbylaserscanning[J].SensorsandActuatorsA:Physical,1999,76(1-3):1-8.(上接第73页)[14]刘芹,王钢,董镝.线路在线监测的自组织自愈无线传感器网络方案[J].高电压技术,2010,36(3):616-620.LiuQ,WangG,DongD.Schemeoflong-distancetrans-missionlineon-linemonitoringforself-organizingandself-healingwirelesssensornetworks[J].HighVoltageEngi-neering,2010,36(3):616-620.[15]庞娜,程德福.基于ZigBee无线传感器网络的温室监测系统设计[J].吉林大学学报,2010,28(1):56-60.PangN,ChengDF.Designofgreenhousemonitoringsys-tembasedonZigBeewirelesssensornetworks[J].JournalofJilinUniversity,2010,28(1):56-60.87 广 东 工 业 大 学 学 报 第31卷 线结构光三维视觉测量中光条纹中心提取综述作者:杨建华, 杨雪荣, 成思源, 雷志盛, 骆少明, 张湘伟, Yang Jian-hua, Yang Xue-rong, Cheng Si-yuan, Lei Zhi-sheng, Luo Shao-ming, Zhang Xiang-wei作者单位:广东工业大学机电工程学院,广东广州,510006刊名:广东工业大学学报英文刊名:Journal of Guangdong University of Technology年,卷(期):2014(1)引用本文格式:杨建华.杨雪荣.成思源.雷志盛.骆少明.张湘伟.Yang Jian-hua.Yang Xue-rong.Cheng Si-yuan. Lei Zhi-sheng.Luo Shao-ming.Zhang Xiang-wei线结构光三维视觉测量中光条纹中心提取综述[期刊论文]-广东工业大学学报 2014(1)。
金属表面非相干线结构光条纹中心提取方法商执亿,王建华,尹培丽,杜虎兵(1.西安工业大学机电工程学院,陕西西安__;2.西安工程大学机电工程学院,陕西西安__)线结构光法因其非接触、效率高、结构简单等优点,在很多形貌测量场合都有着广泛的应用[1-3]。
该方法主要通过提取条纹图像的条纹中心位置来获得被测表面的形貌信息,因此能否准确提取条纹中心是测量的关键。
目前采用线结构光法对金属表面进行形貌测量时,条纹中心的提取误差较大,主要原因是受金属表面光学特性的影响。
线结构光法测量原理是利用被测表面的漫反射光来进行测量,而金属表面通常不是理想的漫反射表面,其表面的光学特性与粗糙度相关。
随着粗糙度值逐渐减小,表面光学特性逐渐从漫反射状态向镜面反射状态过渡。
并且多数情况下,这两种状态是共存且不断变化的,这种复杂的混合反射表面增加了条纹图像灰度分布的复杂性[5-7]。
而传统的条纹中心提取方法,如灰度重心法、极值法、Steger法、几何中心法、边缘法等无法对灰度分布复杂、成像质量不高的条纹图像进行精确、稳定的中心提取[8-10]。
很多学者研究了新的提取方法,如WANG H F针对金属表面反射不均匀的影响,提出了一套结合差分图像法、灰度重心法、Sobel算子和双线性插值的具有较强鲁棒性的光条纹中心亚像素提取方法,条纹的检测误差小于0.1像素。
李凤娇为解决高反光情况下的激光条纹中心提取问题,提出了一种基于多尺度分析的提取方法。
该方法抗噪声能力强,可实现光条宽度变化较大的激光条纹中心的高精度提取。
赵博华提出了一种适用于混合反射特性的粗糙金属表面的激光条纹中心提取方法,该方法先利用图像增强法对图像进行去噪,然后采用灰度重心法提取条纹中心,实验结果表明平均提取误差为0.337 5个像素。
李涛涛针对理想反射、强镜面反射、强漫反射和弱反射4种状态的条纹图像,提出了一种基于高斯-洛伦兹分峰拟合的光条中心提取方法。
该方法的适用性强、精确度高,但耗时长。
上海电力大学学报Journal of Shanghai University of ElecCic Power第37卷第2期2021年4月VoU37,No. 2Apr 2021DOE 10 . 3969/j. issn . 2096 -8299 . 2021.02 . 018基于焊缝图像信息的光条纹中心线提取廉杰1,吕学勤1,顾冬霞2,王敏3(1.上海电力大学,上海200090 ; 2.国网上海青浦供电公司,上海201700;3.国网上海市北供电公司,上海200040)摘要:为准确快速提取不同坡口的焊缝特征信息,采用改进Steger 算法在滤波去噪后的二值图像中提取出光条纹中心线。
首先,将原图像与Otsu 法相结合得到包含所有结构光条纹的矩形区域,利用高斯函数的可分 离性将图像的二维高斯卷积进行简化,用一次高斯行卷积和一次高斯列卷积进行替代,从而减少运算量。
由实验结果可知,改进后的算法不仅能更加准确地提取焊缝光条纹中心线,而且能够提升运行速度,满足实时性 的要求。
关键词:焊缝识别;光条纹中心线;特征提取中图分类号:TP249;TP391.7 文献标志码:A 文章编号:2096 -8299(2021)02 -0195 -05Extraction of Laser Stripe Center Line Based onWeld Image InformationLIAN Jie 1, LYU Xueqin 1, GU Dongxia 2, WANG Min 3(1. Shanghai University of Electric Power , Shanghai 200090, China ;2. Stt Gri Shanghai Qingpu Electric Power Suppfy Company , Shanghai 200000, China ;3. Stat Gid Shanghai Shibei Electric Power Supply Company , Shanghai 200040, China )Abstracr : In order to accurately and quickly extract the weld feature information of dCferentgroov/s , th/improv/d Stg/ralgorithm isus/d to /xtractth/las/rstrip/c/ntrlin/from th/fil-Cred binay image. Firstly , the ROI region is obtained by combining the original image with thethresho'd method.Then , according to theseparabiity ofGau s ian , thetwo-dimensiona'Gau s ian convo'ution oftheimageisequivaentto aGau s ian row convo'ution and aGau s ian co'umn con-vo'ution , so asto reducetheamountofcomputation.Theexperimenta'resu tsshow thatthewe'drecognition a'gorithm can accurate'y extractthewe'd aserstripecenterine , and can improvethe proce s ing speed to meettherea-timerequirements.Key wordt : we'd recognition ; aserstripecenterine ; featureextraction焊接信息的自动提取对于实现焊接自动化有的焊缝识别技术的不断深入发展,其速度和准确着至关重要的作用。
激光条纹法向中心的快速提取算法研究
席剑辉;包辉;任艳
【期刊名称】《科技与创新》
【年(卷),期】2018(000)001
【摘要】探讨一种亚像素级激光条纹法向中心快速提取算法。
主要考虑激光条纹中心存在于条纹骨架的法向截面上,当条纹被物体表面调制成曲线或者受噪声影响不规则变化时,提取法向中心十分困难。
首先设计一个模板对条纹图像进行两次卷积,以消除孤立光斑,并使用中值滤波器来减少随机噪声;其次沿着条纹边缘,在小邻域内计算每个点的灰度梯度值,以获得条纹法线;最后找到距离法线最近的光点,利用灰度重心法提取条纹的亚像素中心坐标。
实验结果证明该算法具有较高的提取精度和广泛的实用性。
【总页数】3页(P41-43)
【作者】席剑辉;包辉;任艳
【作者单位】[1]沈阳航空航天大学自动化学院,辽宁沈阳110136;;[1]沈阳航空航天大学自动化学院,辽宁沈阳110136;;[1]沈阳航空航天大学自动化学院,辽宁沈阳110136
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于 Hessian 矩阵的多结构光条纹中心快速提取方法
2.结肠中心线快速提取算法研究
3.激光条纹法向中心的快速提取算法研究
4.线激光条纹特征的健壮性快速提取
5.强光干扰下的焊缝图像激光条纹提取算法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
matlab灰度重心法提取激光光斑能量中心激光技术在现代工业、医学、军事等领域得到了广泛的应用,而激光光斑能量中心的提取是激光加工、测量等领域中常见的问题。
本文将介绍一种基于matlab灰度重心法的激光光斑能量中心提取方法。
一、灰度重心法原理灰度重心法是一种常见的图像处理方法,其原理基于图像灰度值与位置之间的关系。
对于一个二维图像,其灰度重心可以表示为:$X_{cg}=\frac{\sum_{i=1}^{n}\sum_{j=1}^{m}iI(i,j)}{\sum_{i=1}^{ n}\sum_{j=1}^{m}I(i,j)}$$Y_{cg}=\frac{\sum_{i=1}^{n}\sum_{j=1}^{m}jI(i,j)}{\sum_{i=1}^{ n}\sum_{j=1}^{m}I(i,j)}$其中,$I(i,j)$表示图像在坐标$(i,j)$处的灰度值,$n$和$m$分别表示图像的宽和高。
通过计算图像的灰度重心坐标,可以得到图像中物体的几何中心位置。
二、激光光斑能量中心提取方法对于一个激光光斑,其能量中心可以表示为:$X_{c}=\frac{\sum_{i=1}^{n}\sum_{j=1}^{m}iI(i,j)}{\sum_{i=1}^{n} \sum_{j=1}^{m}I(i,j)}$$Y_{c}=\frac{\sum_{i=1}^{n}\sum_{j=1}^{m}jI(i,j)}{\sum_{i=1}^{n} \sum_{j=1}^{m}I(i,j)}$其中,$I(i,j)$表示激光光斑在坐标$(i,j)$处的能量值,$n$和$m$分别表示激光光斑的宽和高。
通过计算激光光斑的能量中心坐标,可以得到激光束的中心位置。
具体实现步骤如下:1. 读取图像使用matlab中的imread函数读取激光光斑图像,并将其转换为灰度图像。
代码示例:img = imread('laser_spot.jpg');gray_img = rgb2gray(img);2. 图像二值化由于灰度重心法只适用于二值图像,因此需要将灰度图像进行二值化处理。
激光中心线提取算法激光中心线提取算法是一种常用的计算机视觉算法,用于从激光扫描数据中提取出目标物体的中心线信息。
本文将介绍激光中心线提取算法的原理和应用,以及该算法在实际场景中的效果和优化方法。
一、激光中心线提取算法原理激光中心线提取算法是基于激光扫描数据的分析和处理。
激光扫描数据是通过激光传感器获取的目标物体表面的三维坐标点云数据。
而中心线提取算法的目标就是从这些点云数据中提取出目标物体的中心线。
中心线提取算法的原理是基于目标物体的几何特征。
通过对激光扫描数据进行预处理,如去噪、滤波等,可以得到较为干净的点云数据。
然后,通过计算每个点与其邻域点的距离,找出距离最大的点作为中心点。
接下来,根据中心点与其邻域点的距离关系,可以确定中心线的方向。
最后,通过统计中心点的分布情况,可以得到中心线的形状。
激光中心线提取算法在许多领域都有广泛的应用。
其中,最常见的应用就是在机器人导航和自动驾驶系统中。
通过提取道路的中心线,可以帮助机器人或车辆进行路径规划和导航。
此外,激光中心线提取算法还可以应用于工业检测和三维重建等领域。
三、激光中心线提取算法效果及优化方法激光中心线提取算法的效果主要取决于点云数据的质量和算法的参数设置。
如果点云数据存在噪声或缺失,会导致提取的中心线不准确。
因此,在应用激光中心线提取算法之前,需要对点云数据进行预处理,如去噪和补全。
算法的参数设置也会影响提取结果。
例如,中心点的选择和邻域点的距离阈值的设置都会对提取的中心线形状产生影响。
因此,需要根据实际情况进行参数调整和优化,以提高算法的准确性和稳定性。
四、总结激光中心线提取算法是一种常用的计算机视觉算法,通过对激光扫描数据的分析和处理,可以提取出目标物体的中心线信息。
该算法在机器人导航、自动驾驶等领域有广泛的应用。
然而,算法的准确性和稳定性受点云数据质量和参数设置的影响,因此需要进行预处理和优化。
随着计算机视觉技术的不断发展,激光中心线提取算法将在更多领域得到应用,并不断提升其性能和效果。
基于灰度修正与自适应阈值的结构光条纹中心提取方法基于灰度修正与自适应阈值的结构光条纹中心提取方法导读在三维扫描和测量领域中,结构光条纹投影技术被广泛应用于表面三维重建和精确测量。
而其中的重要一环便是结构光条纹中心提取方法。
本文将围绕基于灰度修正与自适应阈值的结构光条纹中心提取方法展开探讨,分析其原理、优势和局限,并深入探讨其在三维重建和测量领域中的应用。
一、结构光条纹中心提取方法概述结构光条纹中心提取方法是指通过对结构光投影得到的条纹图像进行处理,从中准确提取出条纹中心的位置信息。
这一方法的准确性和效率直接影响着后续的三维重建与测量结果。
二、基于灰度修正的结构光条纹中心提取方法1. 灰度修正原理在结构光条纹图像的获取过程中,受到光照、材料表面反射性质等因素影响,条纹图像可能出现灰度失真和不均匀的情况。
在进行条纹中心提取前,首先需要对图像进行灰度修正处理,以确保后续的提取过程准确可靠。
2. 灰度修正方法常见的灰度修正方法包括均值滤波、高斯滤波等,通过消除图像的噪声和不均匀灰度,使得条纹图像的灰度分布更加均匀,从而有利于后续的中心提取。
三、基于自适应阈值的结构光条纹中心提取方法1. 自适应阈值原理在进行条纹中心提取时,为了克服由于光照变化、材料表面不均匀等因素引起的图像噪声和干扰,一种较为常用的方法是采用自适应阈值进行图像二值化处理。
这样可以根据图像本身的特点,动态地选择合适的阈值,从而更好地保留条纹信息。
2. 自适应阈值方法常用的自适应阈值方法包括局部自适应阈值算法、Sauvola算法等,通过将整个图像分割为多个局部区域,并根据每个局部区域的灰度特性动态地选择阈值,实现了对不同部分的条纹进行准确的二值化处理。
四、基于灰度修正与自适应阈值的结构光条纹中心提取方法的优势与应用1. 优势基于灰度修正与自适应阈值的结构光条纹中心提取方法,能够克服图像中的灰度失真和不均匀性,同时能够对条纹图像进行动态的阈值处理,从而保证条纹中心的提取准确性和稳定性。
基于改进灰度重心法的线结构光中心提取算法
夏鑫;付生鹏;夏仁波;赵吉宾;侯维广
【期刊名称】《激光杂志》
【年(卷),期】2024(45)1
【摘要】针对传统算法无法准确提取线结构光条中曲率变化较大区域中心线的缺陷,提出了一种基于改进灰度重心法的线结构光中心线提取算法。
基于阈值法提取感兴趣区域和开闭运算滤除图像中的噪声点,获取质量相对较高的待处理图像;利用灰度重心法提取光条中心点,得到初始坐标并设置一个矩形计算区域,根据最小二乘法计算每个初始点的方向向量和法向量;在设定的矩形区域内计算初始点在其法线方向上的偏移量,得到精确的中心点坐标。
实验结果表明:提出的算法能在线结构光中心中曲率变化较大区域精确提取中心线,提取精度均值为0.096 pixels,精度比率为44.2%,平均提取速度为0.082 s。
【总页数】5页(P75-79)
【作者】夏鑫;付生鹏;夏仁波;赵吉宾;侯维广
【作者单位】中国科学院大学;中国科学院沈阳自动化研究所机器人学国家重点实验室;中国科学院机器人与智能制造创新研究院
【正文语种】中文
【中图分类】TN249
【相关文献】
1.基于梯度重心法的线结构光中心亚像素提取方法
2.基于改进灰度重心法的光带中心提取算法
3.基于改进Steger算法的线结构光中心提取
4.高斯加权的二维灰度重心法提取光条中心
因版权原因,仅展示原文概要,查看原文内容请购买。
基于灰度重心法的多光带中心提取方法
基于灰度重心法的多光带中心提取方法
李庆波;张英健
【期刊名称】《中国包装科技博览》
【年(卷),期】2012(000)007
【摘要】在利用光切法测量三维物体轮廓的系统中,当在特定角度拍摄时,图像会出现在同一行出现两条或多条光带的现象,针对此种情况单一的灰度重心法难以满足对光带中心提取的需要。
本文提出了一种利用爬山法和灰度重心法相互结合的新方法来解决多光带中心提取的问题。
爬山法可判断一行有多少条光线,灰度重心法可提取每一条光带重心,两者相互结合即可实现多光带中心提取。
通过实验结果可看出此方法计算速度快,精度高,具有良好的适用性,便于编程实现。
【总页数】2页(60-61)
【关键词】光切法;灰度重心法;爬山法;多光带中心提取
【作者】李庆波;张英健
【作者单位】哈尔滨工程大学理学院,黑龙江哈尔滨150001;哈尔滨工程大学理学院,黑龙江哈尔滨150001
【正文语种】中文
【中图分类】TP731
【相关文献】
1.基于改进灰度重心法的光带中心提取算法 [J], 张小艳; 王晓强; 白福忠; 田朝平; 梅秀庄
2.基于梯度重心法的线结构光中心亚像素提取方法[J], 吴家勇; 王平江; 陈吉红;。
基于改进灰度重心法的光带中心提取算法张小艳;王晓强;白福忠;田朝平;梅秀庄【摘要】在线结构光三维测量中,由于线结构光光源质量、物体表面反射率非均匀性以及表面粗糙性等因素的影响,激光光带经常会出现宽度不均匀,光带亮度不集中、离散性较大的现象。
本文提出一种改进灰度重心法提取激光光带中心线,该算法基于自适应二值化处理得到光带各列法向宽度值以及光带的准确边界。
然后,利用光带边界与灰度数据进行灰度重心计算确定出光带的中心位置。
结果证实,改进算法中灰度重心的计算范围与光带宽度相一致,因而具有较高的提取精度和良好的适应性。
%In three-dimensional testing systems based on line structured-light,due to the effect of the line structured-light quality and the nonuniform of object surface reflectivity as well as the surface roughness,the laser stripe often ap-pears some problems such as the uneven width,non-concentrated brightness and larger discreteness. An improved gray centroid method to extract the center line of laser strip was proposed. Based on the adaptive binarization processing, the normal widths of each column and accurate edge of the light stripe were obtained. Then,according to light stripe’ s edge and gray data,the center of light stripe was calculated by the gray centroid method. The results prove that the calculated range of centroid in the improved method is consistent with light strip width,so it has high extraction accu-racy and good adaptability.【期刊名称】《激光与红外》【年(卷),期】2016(046)005【总页数】5页(P622-626)【关键词】三维测量;线结构光;三角测量法;光带中心;改进灰度重心法【作者】张小艳;王晓强;白福忠;田朝平;梅秀庄【作者单位】内蒙古工业大学机械学院,内蒙古呼和浩特010051;内蒙古工业大学信息工程学院,内蒙古呼和浩特010080;内蒙古工业大学机械学院,内蒙古呼和浩特010051;内蒙古工业大学机械学院,内蒙古呼和浩特010051;内蒙古工业大学机械学院,内蒙古呼和浩特010051【正文语种】中文【中图分类】TP391.41线结构光测量系统主要基于光学三角测量原理,由激光发生器和CCD传感器共同作为结构光图像传感器组成视觉测量系统。
激光条纹中心线提取
激光条纹中心线提取是一种基于数字图像处理技术,用于从激光投影中提取条纹中心线的方法。
该方法可以广泛应用于三维重建、机器视觉、自动检测等领域。
激光投影技术是将激光束投射到物体表面,通过测量反射光的形态和方向来重建物体的三维模型。
在激光投影中,激光束将物体表面投影成一系列平行的条纹。
这些条纹的中心线可以提供物体表面的精确位置和形状信息。
激光条纹中心线提取主要包括以下步骤:首先,对激光投影图像进行预处理,包括去除噪声、增强对比度等;然后,通过阈值分割将图像分为黑白两部分;接着,使用形态学操作去除条纹中的噪点和毛刺;最后,利用数学方法或曲线拟合算法提取条纹中心线,从而得到物体表面的准确位置和形状信息。
激光条纹中心线提取技术在自动检测、机器视觉、三维重建等领域具有广泛的应用前景。
随着数字图像处理技术的不断发展,激光条纹中心线提取的精度和效率将会更加提高,为实现更加智能的机器视觉和自动化检测提供更加可靠的技术支持。
- 1 -。
基于空间灰度重心推进的线结构光中心提取
卜民众;吴国新;黄金鹏;左云波;刘秀丽
【期刊名称】《电子测量技术》
【年(卷),期】2024(47)2
【摘要】利用线结构光对工件进行三维测量时,快速、准确提取激光光条中心是测量系统的关键技术之一。
提出一种基于空间灰度重心推进的激光中心提取方法。
该方法基于激光条纹空间灰度重心向前推进,结合八邻域判定法进行光条空间区域的选取,接着对选取的区域进行新的空间灰度重心坐标提取;在完成整幅图像提取后,采取3σ准则剔除异常中心点,最终获得激光中心坐标信息。
实验结果表明,所提算法对不同类型条纹的适用性强,提取效果稳定。
提取中心均方根误差为0.492pixel,相较于提取精度最优的Steger改进算法提升了9.8%,提取速度提高了5倍;相较于处理速度最优的内部推进算法,在保持提取速度基础上,提取精度提升了24.1%。
同时,所提算法极大增强了对欠曝光光条图像的处理能力,有效降低了环境对线结构光测量的限制。
【总页数】7页(P44-50)
【作者】卜民众;吴国新;黄金鹏;左云波;刘秀丽
【作者单位】北京信息科技大学现代测控技术教育部重点实验室;北京信息科技大学机电工程学院
【正文语种】中文
【中图分类】TN247
【相关文献】
1.基于梯度重心法的线结构光中心亚像素提取方法
2.高斯加权的二维灰度重心法提取光条中心
3.基于系统空间结构约束的多线结构光条纹中心线提取方法
4.法向邻域加权灰度重心的光条中心提取法
5.基于改进灰度重心法的线结构光中心提取算法
因版权原因,仅展示原文概要,查看原文内容请购买。
灰度重心法提取激光条纹中心线
灰度重心法是一种常用的图像处理方法,可以用于提取激光条纹的中心线。
激光条纹是一种重要的光学现象,广泛应用于三维重建、轮廓测量等领域。
本文将介绍灰度重心法的原理和步骤,并结合实例进行详细说明。
灰度重心法是一种基于灰度信息的图像处理方法。
在激光条纹图像中,激光条纹通常呈现出明暗交替的条纹模式。
而激光条纹的中心线是条纹中灰度最高的位置,通过提取中心线可以得到激光条纹的轮廓信息。
灰度重心法就是利用条纹中灰度最高的位置作为中心线的提取方法。
具体的提取步骤如下:
1. 预处理:首先需要对激光条纹图像进行预处理,包括去噪、灰度化等操作。
去噪可以采用滤波算法,如均值滤波、中值滤波等。
灰度化则是将彩色图像转换为灰度图像,只保留亮度信息。
2. 二值化:将灰度图像转换为二值图像,即将灰度值大于某个阈值的像素点设置为白色,小于阈值的像素点设置为黑色。
二值化操作可以使用简单的阈值分割方法,也可以使用自适应阈值分割等方法。
3. 边缘检测:对二值图像进行边缘检测,可以使用常见的边缘检测算法,如Sobel算子、Canny算子等。
边缘检测可以提取出激光条
纹的边缘信息。
4. 中心线提取:通过灰度重心法提取激光条纹的中心线。
首先计算每一列的灰度重心,即计算每一列中灰度最高的位置。
然后将这些灰度最高位置连接起来,得到中心线。
灰度重心法的原理是基于激光条纹的灰度分布特性。
激光条纹的中心线上的像素点具有最高的灰度值,而离中心线越远的像素点灰度值逐渐降低。
因此,通过计算每一列的灰度重心,可以得到激光条纹的中心线位置。
下面以实例说明灰度重心法的应用。
假设我们有一张激光条纹图像,经过预处理后得到二值图像。
然后使用Sobel算子进行边缘检测,得到边缘图像。
接下来,我们计算每一列的灰度重心,得到中心线的位置。
最后,将中心线绘制在原始图像上,即可得到激光条纹的中心线。
灰度重心法在激光条纹的轮廓提取中具有较好的效果。
相比于其他方法,灰度重心法不需要复杂的数学模型或大量的计算,简单易实现。
但是需要注意的是,灰度重心法对于噪声和遮挡比较敏感,因此在实际应用中需要结合其他方法进行优化和改进。
总结起来,灰度重心法是一种基于灰度信息的图像处理方法,可以用于提取激光条纹的中心线。
通过预处理、二值化、边缘检测和灰
度重心计算等步骤,可以得到激光条纹的中心线,并用于轮廓提取等应用中。
灰度重心法简单易实现,但对噪声和遮挡比较敏感,需要注意实际应用中的优化和改进。