一种基于脊线跟踪的冠状动脉中心线提取方法
- 格式:pdf
- 大小:232.68 KB
- 文档页数:3
ISSN 1000-0054CN 11-2223/N 清华大学学报(自然科学版)J T singh ua Un iv (Sci &Tech ),2007年第47卷第6期2007,V o l.47,N o.634/36889-892基于Hessian 矩阵的冠状动脉中心线的跟踪算法许 燕1, 胡广书1, 商丽华2, 耿进朝2(1.清华大学生物医学工程系,北京100084;2.清华大学第一附属医院,北京100016)收稿日期:2006-06-12基金项目:裕元医学科学研究基金资助项目作者简介:许燕(1980—),女(汉),浙江,博士研究生。
通讯联系人:胡广书,教授,E -mail :hgs -d ea @ts inghu a .edu .cn摘 要:冠状动脉血管造影对医生临床诊断心血管疾病非常有帮助。
在冠状动脉造影图像上对冠脉中心线的正确提取是冠脉边缘定位和三维重建的基础。
该文提出的中心线提取方法是对经典Sun 算法的改进,此方法结合了Hessian 矩阵特征向量和Canny 算子来进行准确提取。
实验结果表明:结合Hessian 矩阵特征向量的方向,较好地解决了冠脉造影图像中冠脉曲率变化剧烈而跟踪不准确的情况;结合Can-ny 算子的半径计算,较好地解决了冠脉造影图像中冠脉重叠和交叉出现时错误跟踪的情况。
与经典Sun 算法相比,本方法有很好的鲁棒性和较高的准确性。
关键词:图像分析;冠状动脉;中心线;Hessian 矩阵;特征向量中图分类号:T N 911.73文献标识码:A文章编号:1000-0054(2007)06-0889-04Adaptive tracking extraction of vessel centerlines in coronary arteriogramsusing Hessian matrixXU Yan 1,HU G uangshu 1,SHA NG Lih ua 2,G ENG Jinzh ao 2(1.Department of Biomedical Engineering ,T s inghua University ,Beij ing 100084,China ;2.The No .1Hospital Attached to Tsinghua University ,Beij ing 100016,China )Abstract :A method for accurate ex tr action of the coronar y arter ial centerline was pres ented for au tom ated positioning of th e coronary ves sel border s and 3-D reconstruction to aid clin ical diagnoses of cardiovas cular d iseases.T he meth od is an improvement of the Sun ar ith metic.Th e m ethod implemen ts an accu rate ex traction using Hes sian matrix eigenvectors and the C ann y operator.The tes t results s how that the determination of the centerline point directions by th e Hess ian matrix eigenvector resolves tr acking inaccur acies resulting from ab rupt changes of the arterial curvatu re.T hecalculation of th e artery radiu s by th e Canny operator r esolves inter ruptions of the tr acking res ulting from the s uper pos ition and overlappin g of the coronary artery.T he m ethod has betterrobus tn es s and accu racy than the Sun algorithm.Key words :image analysis ;coronar y artery;center line;Hess ianmatrix;eigenvector冠状动脉血管造影可以辅助医生准确诊断心血管疾病。
冠状动脉中心线提取2018.12.51简介1.1步骤和实现方式本次任务是从冠状动脉增强图像提取血管中心线。
步骤和实现方式大致如下:•图像二值化:读入.mha格式CT图像,阈值处理;•空洞填充•图像细化:类似腐蚀,取最大内切球心的集合•端点分叉点检测:考虑26邻域内像素个数,卷积实现•断裂分支重连:寻找连接点,条件判断,Dijkstra最小代价连接•构建中心线:在分叉点集基础上追踪,数组存储在Cell中1.2运行说明coronary_refine.m是主要的运行函数。
其他函数和脚本:branchReconnect输入细化后的图像和权重(原始CT volume的像素值为可能性),其中调用了三维的Dijkstra函数;directConnect脚本很简短地实现在三维图像中两点连直线,但因为用了最短路径所以没有采用;其余函数都是由比较冗长的小功能封装成的。
两张图片运行时间小于一分钟。
2实现方法2.1阈值为了不让阈值化后丢失的成分过多,对后续分支重连的步骤造成困难,这里选择了较小的阈值0.1*原图最大值(2^16)。
这也导致最后结果中分支会显得比0.5的阈值下丰富很多,但算法能够原图(mha)保证最终中心线和真实血管走向的一致性。
2.2空洞填充一开始使用的是imfill函数,通过查看源代码可见这个函数调用了imcomplement和imreconstruct对二值图像进行填充。
imfill对三维图像的处理速度较慢,最终使用形态学库函数bwmorph3中的fill功能进行处理。
图1:Skeleton of a rectangle defined in terms of bi-tangent circles.2.3图像细化程序中调用了bwskel来实现。
Thinning在文献中有两种最为常见的方法,一种被称为“Onion peeling”1,顾名思义用不断的腐蚀操作来一层一层地剥开血管,难点是设置一定的条件来保证原有拓扑结构。
一种基于管状特征的冠脉中心线自动提取算法王胜军;付玲;康雁;刘积仁【摘要】针对冠脉分割不准确以及血管曲率变化比较大导致的中心线提取不准确问题,提出了一种基于管状结构特征的冠脉中心线自动提取算法.首先对冠脉进行基于骨架线节点结构特征的冠脉血管中心线粗提取;然后利用冠脉的管状结构特征,提出三种血管结构判断准则,以检测血管断开情况;最后利用血管的局部结构特征,校正血管中心线,以得到完整、连续的血管中心线.对冠脉CTA体数据进行实验,实验结果表明该算法能够很好地解决冠脉分割不准确以及血管曲率变化比较大情况下造成的中心线提取不正确问题,具有很强的鲁棒性.【期刊名称】《东北大学学报(自然科学版)》【年(卷),期】2011(032)001【总页数】5页(P27-31)【关键词】中心线提取;管状结构特征;骨架线;冠状动脉;血管结构【作者】王胜军;付玲;康雁;刘积仁【作者单位】东北大学信息科学与工程学院,辽宁,沈阳,110819;东北大学中荷生物医学与信息工程学院,辽宁,沈阳,110819;东北大学中荷生物医学与信息工程学院,辽宁,沈阳,110819;东北大学信息科学与工程学院,辽宁,沈阳,110819;东北大学中荷生物医学与信息工程学院,辽宁,沈阳,110819【正文语种】中文【中图分类】TP391.72在医学影像分析中,管状组织的中心线提取已经得到越来越多的应用,尤其是在诊断冠心病方面·近年来,冠心病已成为人类的第一杀手,冠脉计算机断层造影增强图像(computed tomography angiography,CTA)由于其高时空分辨率和无创性,已经成为目前临床上医生诊断心血管疾病的主要筛查手段·目前,血管中心线的提取算法主要有三种:1)基于细化的方法[1-4],此方法的基本思想是根据血管分割后的二值图像,采用数学形态学的腐蚀运算得到血管骨架线·此方法能够很好地保持血管的拓扑结构,但其依赖血管分割的结果,当血管出现过分割或欠分割时,其所得到的血管中心线是不准确的·2)基于方向追踪的方法[5-6],此方法的基本思想是给出初始点,通过计算血管各相邻点之间的关系,自动追踪出血管的中心线·此方法能很好地解决血管中心线的连续性问题,但对血管的整体拓扑结构不敏感,容易把两支血管的部分段连接成一条血管的中心线,出现中心线提取错误现象·3)基于距离变换的方法[7-8],此方法的基本思想是通过在到起点距离值相同的体素中找出到表面的最短距离值最大的体素点,将这些体素点连接就构成了血管中心线·此方法提取的中心线位置较为准确,但受分割结果和血管曲率变化影响比较严重,不适用于冠脉的中心线提取·由此可见,以上三种算法是针对不同的应用背景和问题,并且算法间各有利弊·针对冠脉分割不准确和血管曲率变化比较大、分支较多,造成的中心线提取不正确问题,本文提出了一种基于管状组织结构特征的中心线自动提取算法·充分结合与利用细化算法保持整体拓扑性能好和追踪算法能局部最优的优势,通过对冠脉进行骨架线提取并提出了3个血管局部断开判断准则,来解决血管错误断开造成的中心线提取不准确问题,从而得到完整、连续的血管中心线·本文的算法可扩展应用到其他管状组织的中心线提取问题上·1 骨架线节点特征的中心线预提取1.1 基于节点属性特征的骨架线节点分类血管骨架线体现了血管图像的形态特征·细化是一种提取骨架的过程·文献[1]提出了一种基于形态学的提取物体中轴线的连续三维细化算法,采用这种细化方法得到的骨架线具有26邻域的单像素连通性,即骨架线上任意一点只属于以下三种属性: 1)端点,说明此点只有1个邻域点,在血管上表现为血管起始点或者是血管末端点,如图1中PA和PB点;图1 节点分类和提取示意图Fig.1 Schematic of node classification and extraction2)普通连接点,说明此点具有2个邻域点,在血管上表现为血管的中间点,如图1中MA和MB点;3)分支点,说明此点具有3个领域点,在血管上表现为血管分叉点,如图1中QA和QB点·根据骨架线上节点的3个属性特征,可以预提取出血管的各支中心线,为后面的中心线校正算法提供输入·此时血管的中心线具有血管的整体形态特征,即使出现血管曲率变化比较大或分支比较多的情况,也能准确地把握血管的走形·血管中心线的预提取过程如下:1)对血管树进行分类,即通过判断骨架线上的节点是否相连或可由骨架线上其他节点间接相连来判断这些节点是否属于同一类,如图1所示,PA,MA和QA节点归为一类,A类和B类是两个不同的血管树·2)选择其中一个血管树的任意一个端点作为初始点·判断其是否运算过,若没有则进行过程3);若有则继续选择其他血管树的端点,直到所有血管树都处理完为止·3)沿着血管树进行节点搜索·判断当前点的26邻域中骨架线上节点的属性:如果是普通连接点,则更新当前点,继续进行过程3);如果是分叉点,则将分支点存储起来,继续进行过程3);如果是端点,则进行过程4)·4)判断是否还存在未计算的分支点:如果有,将该点从分支存储结构中删除,并继续过程3);如果没有,则说明此血管树的节点搜索过程结束,继续进行过程2)·1.2 基于血管整体结构特征的根节点提取1.1 节中所提取的血管中心线虽然具有血管的形态特征,但是却缺乏血管的走向信息,即所提取的中心线只是一条从血管的一个端点到另一个端点的线·如图2右边的中心线所示,在不知道冠脉根节点的情况下,提取的中心线会出现把两支血管的各自分支组合成一支血管的中心线的现象,导致中心线提取错误·因此还必须知道冠脉血管的根节点,才能正确把握冠脉血管中心线的方向,如图2中左边提取的冠脉血管中心线·通过分析冠脉的医学解剖结构知识以及观察冠脉三维结构重建图可知,心脏冠脉树只有两个:左冠脉和右冠脉·其中每个冠脉树只有一个根节点,位于整个冠脉偏上的位置、升主动脉的开口处,因此可以通过同类(或不同类)的节点位置关系确定根节点·在连通的一类节点中,根据分割结果中是否具有升主动脉而采用不同的根节点确定方法,以保证根节点提取算法的鲁棒性·图2 不同节点下的中心线提取对比Fig.2 Centerline extraction with different node2 血管局部结构特征的中心线校正在实际医学影像后处理的应用中,由于受到CTA图像的复杂性及强随机性等客观因素的影响,或采用的分割策略对于过分割抑制过度等造成的欠分割断开现象[9],其细化后得到的骨架线必然是断开的,这将导致1.1节中冠脉树的分类个数超过实际冠脉树的个数·因此还必须把含有根节点的冠脉树和其他不含有根节点的血管树进行连接,以校正1节中预提取的血管中心线·2.1 血管局部几何形态特征判断在对两个血管树进行连接时,最重要的一点就是对两个血管树之间的断开部位进行判断·因此可以在1.1节的基础上,对不同血管树端点之间的结构进行判断,以连接断开的血管树·在这里本文通过大量的实验,观察分析后提出了三种判断准则,通过联合判断来保证其准确性·1)两端点之间的距离·从血管的拓扑结构出发,对实际断开部位进行观察、分析发现断开部位一般具有较小的尺寸,在细化后的骨架线上体现为断开位置的端点对具有较近的距离,因此将不同血管树的端点之间的距离作为断开部位的判断准则之一·如图3所示,D12为两端点 P1和 P2之间的距离·当D12满足D12<Dt时,认为两端点之间有可能存在血管断开情况,则继续进行下一个判断·其中Dt为距离阈值,是由不同的管状组织的结构特征决定的·2)两端点指向内侧的向量之间的夹角·由于断开部位的两侧属于同一支血管,生理结构上一般会平滑的连接,不会出现较大的转折,因此端点两侧的延伸线之间会有较大的夹角·如图3所示,设两端点 P1和 P2各自指向内侧方向的邻近骨架点的方向向量分别为 V1和 V2,则θ(0°≤θ≤180°)为两向量之间的夹角,θt为夹角阈值,阈值的选择是由不同的管状组织的结构特征决定的·当θ满足θ>θt时,认为该节点对之间具有断开特征,继续进行后续处理·图3 断开部位判断方法说明图Fig.3 Judgement of disconnected parts3)两端点之间的血管局部结构特征·对于符合上述两个判断准则的端点对,还必须考虑两个血管树端点之间区域是否存在血管结构·若只采用上述两种方法进行判断,则很可能出现一条血管树的中间断开部位与另一条血管树的实际末端部位相连的现象·因此还必须对其做进一步处理,逐点判断两端点之间是否具有血管结构,并在满足条件时,校正中心线,具体过程见2.2节·2.2 基于血管局部结构特征的中心线校正对两端点进行血管局部结构特征判断的过程实际是沿两端点的方向不断逐点搜索和判断的过程,搜索的依据是CTA体数据中血管处具有高亮的CT值·图4是基于血管局部结构特征的中心线连接示意图,其中P1和P2是断开部位的两个端点,P′是两端点之间搜索到的可能的血管中心点,P是经过中心似然函数值确定的血管中心点,通过不断地把经过判断后的血管中心点融入1节中粗提取的血管中心线中,可以完成血管树之间的连接,从而完成中心线的连接和校正·图4 断开部分连接示意图Fig.4 Connection of disconnected parts of vessel中心似然函数是基于几何形状提出来的概念·从血管的解剖学知识上可知,血管的横截面呈现为一个类椭圆形,是一个几何对称图形,即沿各个方向过中心点的直线被中心点平分,如图5所示·图5是图4中过P′点的血管横截面示意图·从血管横截面内任意一点P出发,可以产生一组射线对l1,l2,…,ln,每组射线对到达血管的边缘之后停止·对于每组射线对,都存在方向相反的两条射线r1li和r2li·因此可以通过计算其中心点似然性函数CL[10]来校正中心点·CL越接近1,说明此点越接近血管的中心点·图5 中心点可能性函数计算说明图Fig.5 Explanation to calculate center likelihood综上所述,图6给出了本文冠脉中心线提取算法的完整流程图·图6 冠脉中心线自动提取的完整流程示意图Fig.6 Flowchart of automatic centerline extraction of coronary arteries3 实验与讨论为了验证本文算法的准确性和鲁棒性,实验时分别对细化、方向追踪和本文的方法进行对比,选取临床得到的CTA体数据进行实验,实验图像来源于中国医科大学附属盛京医院·从图7中可以看到当血管分割良好,不存在欠分割的情况下,即使血管曲率变化比较大或分支比较多,其细化后提取的中心线也能够很好地保持血管的拓扑结构,其形态、位置以及走形都与原血管保持一致,但是当血管分割出现错误断开的情况下,采用细化算法提取的中心线会出现断开的现象,如图7中方框所示,这必然导致血管中心线提取错误·图7 细化算法提取血管中心线Fig.7 Centerline extraction by refining从图8a中可以看到,即使出现分割不准确造成的错误断开部位,方向追踪算法也能很好地连接断开血管的中心线,使得中心线完整、连续·但是当冠脉树血管中出现血管曲率变化比较大或血管分支比较多的时候,方向追踪算法提取的血管中心线将会在追踪的过程中截止或改变方向,从而不能得到完整的血管中心线,或者出现错误提取血管中心线的现象,如图8b所示·图8 方向追踪算法提取血管中心线Fig.8 Centerline extraction by directional tracing algorithm(a)—断开中心线被连接;(b)—方向追踪错误·图9是采用本文的方法得到的血管中心线示意图,图中只显示了其中一只血管的中心线提取情况·从图9中可以看出,无论是单个血管树,还是多个血管树,无论分割结果中是含有升主动脉,还是不含有升主动脉,无论分割结果是好还是坏,所提取的中心线都能够很好地保持原血管的拓扑结构·对于血管分割不正确造成的血管错误断开部位,本文的算法也能够在保证原血管走向的基础上,对断开部位进行校正、连接·对于血管曲率变化比较大或血管分支比较多的情况,本文的算法也能够正确地提取血管的中心线·表1是对50套冠脉CTA体数据进行细化、方向追踪和本文算法的中心线自动提取的统计结果,其中共有92个冠脉树,222条血管,其中正确率是指正确提取中心线总条数占血管总条数的百分比·实验时所用的血管结构判断阈值是大量的统计数据所得到的经验值,其中判断准则1中的距离阈值为9 mm,判断准则2中的角度阈值为90°·表中WN/TN表示错误提取中心线条数/血管总条数;DWN表示断开错误造成的中心线提取错误条数;OWN表示方向错误造成的中心线提取错误条数·图9 中心线提取结果图Fig.9 Results of centerline extraction表1 3种方法提取中心线数据对比Table 1 Comparison between three algorithms for centerline extraction方法 WN/TN DWN OWN 正确率/%单独细化 64/222 24 40 71.2直接追踪 109/222 6 103 50.9本文算法 43/222 2 41 80.6从表1统计到的实验数据中可知,细化和追踪两种方法对冠脉中心线的自动提取都存在一定的局限性·基于细化的中心线提取方法虽然能够提供血管完整的拓扑结构信息,但是却不能自动连接血管错误断开的部位;基于方向追踪的方法虽然能自动连接血管错误断开的部位,但是却不能顾及血管整体的拓扑结构信息·这两种方法在提取管状组织的中心线时都不具有鲁棒性·本文从管状组织的结构特征出发,对血管中心线进行自动提取,在分割出来的222条血管中,能够正确提取179条血管中心线,正确率为80.6%·4 结论针对冠脉的中心线提取问题,本文分别从管状组织的整体和局部结构特征出发,提出了一种基于管状组织结构特征的冠脉中心线自动提取算法·首先从冠脉的整体结构特征出发,对血管细化后的骨架线上的节点进行属性分类;然后针对分割问题造成的血管错误断开的情况,提出了基于血管局部结构特征的3个判断准则,从而实现正确提取血管中心线的目的·对50套冠脉CTA体数据进行实验,结果表明,本文方法提取的中心线结果优于细化算法和方向追踪算法,具有很强的鲁棒性,有利于CTA在心血管疾病的临床诊断中的应用,同时本文的方法也可扩展应用到其他管状组织的中心线提取问题上·参考文献:[1] Kalman P,Erich S,Emese B,et al.A sequential 3D thinning algorithm and its medical application[J].Information Processing in Medical Image:LectureNotes in Computer Science,2001,2082:409-415.[2] She F H,Chen R H,Gao W M,et al.Improved 3D thinning algorithms for skeleton extraction[J].Digital Image Computing:Techniques and Applications,2009,9(2):14-18.[3] Ma C M,Sonka M.A fully parallel 3D thinning algorithm and its applications[J].Computer Vision and Image Understanding,1996,64(3):420-433.[4] Guo J K,Chen C H,Lee J D,et al.3-D image reconstruction of brain blood vessels from angiograms[J].Computers&Mathematics with Applications,1998,35(8):79-94.[5] Ying S.Automated identification of vessel contours in coronary arteriogram by an adaptive tracking algorithm[J].IEEE Transactions on Medical Imaging,1989,8(1):78-87.[6] Li Y C,Liu Y,Wang Y T.Novel algorithm for centerline extraction of coronary arterial tree in coronary angiographic projections[J].IEEE/ICME International Conference on Complex Medical Engineering,2007,16(8):802-807.[7] Wan M,Liang Z R,Ke Q,et al.Automatic centerline extraction for virtual colonoscopy[J].IEEE Transactions on Medical Imaging,2002,21(12):1450-1460.[8] Niblack C W,Gibbons P B,Capson D W.Generating skeletons and centerlines from the distance transform[J].Graphical Models and Image Processing,1992,54(5):420-437.[9] 高奇新,于洋,赵大哲,等·一种基于水平集的肺部血管快速分割方法[J]·东北大学学报:自然科学版,2008,29(6):807-810·(Gao Qi-xin,Yu Yang,Zhao Da-zhe,et al.3D rapid segmentation of pulmonary vessel and feature ex traction through threshold level set[J].Journal of Northeastern University:Natural Science,2008,29(6):807-810.)[10] Wink O,Niessen W J,Viergever M A.Fast delineation and visualization of vessels in 3-D angiographic images[J].IEEE Transactions on Medical Imaging,2000,19(4):337-346.。
![一种提取冠状动脉血管中心线的方法[发明专利]](https://uimg.taocdn.com/1403b5b203d276a20029bd64783e0912a2167c35.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810025437.9(22)申请日 2018.01.11(71)申请人 苏州润心医疗器械有限公司地址 215000 江苏省苏州市工业园区金鸡湖大道99号苏州纳米城西北区5幢502室(72)发明人 霍云飞 冯亮 吴星云 霍勇 龚艳君 李建平 易铁慈 杨帆 (74)专利代理机构 苏州创元专利商标事务所有限公司 32103代理人 范晴(51)Int.Cl.G06T 7/00(2017.01)G06T 7/187(2017.01)G06T 7/62(2017.01)G06T 7/66(2017.01)(54)发明名称一种提取冠状动脉血管中心线的方法(57)摘要本发明公开了一种提取冠状动脉血管中心线的方法,包括如下步骤:步骤S1:输入冠脉树和主动脉的数据;步骤S2:自动提取冠脉树的开始点以及所有分支血管的结束点;步骤S3:使用Marching Cubes算法将冠脉树数据生成网格模型数据;步骤S 4:对网格上所有的点进行Delaunay三角剖分处理并生成三维的Voronol 图;步骤S5:在Voronoi图上定位开始点和所有分支血管的结束点,并计算开始点和结束点之间的最短路径,得出对应的几条曲线;步骤S6:对所获得的曲线进行等距过滤,形成完整的中心线数据;其优点在于自动获取冠状动脉血管的开始点和结束点,保证了中心线的准确性并充分利用计算机的强大处理能力,免去了手动交互方式获取开始点和结束点的步骤,极大的提高了医生诊断的效率。
权利要求书2页 说明书4页 附图3页CN 108133478 A 2018.06.08C N 108133478A1.一种提取冠状动脉血管中心线的方法,其特征在于,包括如下步骤:步骤S1:输入冠脉树和主动脉的数据;步骤S2:根据步骤S1中的冠脉树和主动脉数据,由数据重叠部分获取交叉部分,并获得其质心M,然后以质心M作为开始点,采用蚕食方式逐步遍历冠脉树数据直至各分支血管的末梢,获得所有分支血管的结束点;步骤S3:使用Marching Cubes算法将冠脉树数据提取等值面,生成网格模型数据,并计算法向量;步骤S4:对网格上所有的点进行Delaunay三角剖分处理并生成三维的Voronol图;步骤S5:在Voronoi图上定位步骤S2中的开始点和所有分支血管的结束点,利用欧氏距离计算开始点和结束点在Voronoi图上的最近点,然后使用Fast Marching算法计算开始点和结束点之间的最短路径,得出对应的几条曲线;步骤S6:对所获得的曲线进行等距过滤,形成完整的中心线数据。
基于追踪的冠状动脉中心线提取方法
石磊
【期刊名称】《科技风》
【年(卷),期】2012(000)009
【摘要】在计算机辅助诊断软件中,冠状动脉疾病的自动检测首先需要血管的中心路径。
本文提出了一个新颖的基于追踪的中心线提取方法,该方法只需交互输入起始点,以确定需要追踪的血管分支,其余的过程均自动完成。
该方法能够自动识别冠脉根部的走向,获得该支血管从根部直到末梢的完整中心线。
所提出的方法使用多套临床心脏 CTA (Computedtomographyangiography,计算机断层造影)数据进行了评估,评估结果显示该方法具有很高的准确性和稳定性,且用时均在5秒以内【总页数】1页(P12-12)
【作者】石磊
【作者单位】沈阳地铁集团有限公司车辆维护中心技术部,辽宁沈阳110141【正文语种】中文
【相关文献】
1.一种基于脊线跟踪的冠状动脉中心线提取方法 [J], 高飞;高新波
2.一种基于脊线跟踪的冠状动脉中心线提取方法 [J], 高飞;高新波
3.基于步行轨迹的复杂道路中心线提取方法 [J], 李俊杰; 刘鹏程; 顿玉多吉
4.基于矢量路面提取道路中心线智能提取方法的实现 [J], 刘学民
5.基于YOLOv3目标检测的秧苗列中心线提取方法 [J], 张勤;王家辉;李彬
因版权原因,仅展示原文概要,查看原文内容请购买。
收稿日期:2006-11-26;修订日期:2007-07-06 基金项目:新世纪优秀人才支持计划资助项目(NCET 20420948) 作者简介:高飞(1968-),男,山东昌乐人,副教授,博士,主要研究方向:智能信息处理、图像图形学; 高新波(1972-),男,山东莱芜人,教授,博士,主要研究方向:智能信息处理、图像工程、视频信号处理.文章编号:1001-9081(2007)S1-0380-02一种基于脊线跟踪的冠状动脉中心线提取方法高 飞1,高新波2(1.深圳大学信息工程学院,广东深圳518060;2.西安电子科技大学电子工程学院,陕西西安710071)(nels on_gao2010@yahoo .com;nels ongao2010@g mail .com )摘 要:冠脉血管中心线的提取是血管造影图像定量分析中的关键步骤。
基于脊线跟踪法,提出了一种血管中心线自动提取方法。
通过交互式地指定一个起始点和一个终止点,该算法能够自动获取两点间的血管中心线。
实验结果表明了该方法的鲁棒性和可重复性。
关键词:中心线提取;定量冠脉分析;脊线跟踪中图分类号:TP391.41 文献标识码:A0 引言冠脉血管造影是临床诊断的重要手段。
对冠脉血管进行定量分析具有重要的实际意义。
与传统定性诊断方法相比,它克服了医生判断的主观随意性,提供了更为客观准确的诊断依据。
血管轮廓线和中心线的自动提取是血管定量分析的前提。
在血管造影图像中,血管的提取可以采用基于区域或边缘的图像分割技术。
文献[1]中指出血管的剖面灰度分布呈近似高斯型,因此利用二维高斯模板来提取血管,但该方法比较耗时。
文献[2]中利用一维旋转高斯模板代替了二维高斯模板,降低了算法的复杂度。
不过,从精确分析的角度看,在血管分析中准确提取血管边缘是更好的选择。
在现有的许多血管轮廓提取算法中,血管中心线的检测是最为关键和困难的一步。
最简单的方法是手工描绘[3],但该方法费时费力且可重复性差,所以逐渐为人机交互的半自动方法所取代。
在这些交互式方法中,操作者只需指明待分析血管段的起始点和结束点,就可以自动获得两点间的中心线[4,6]。
不过,现有的中心线提取算法大都基于动态规划方法的,搜索时间较长,难以满足临床上实时性的要求。
因此急需研究实时性能好的血管中心线提取算法。
既然血管剖面呈近似高斯分布,那么可以将血管的中心线看作脊线。
中心线提取问题就转化为脊线的检测。
受文献[5]中指纹特征点提取的脊线跟踪法的启发,本文提出了一种基于脊线跟踪的血管中心线提取方法,在实际应用中也取得了比较好的效果。
需要指出的是,这里所说的中心线并不是严格的血管的对称轴线,只要求它位于血管内部且与血管走向一致即可,文献[4]中对此有详细说明。
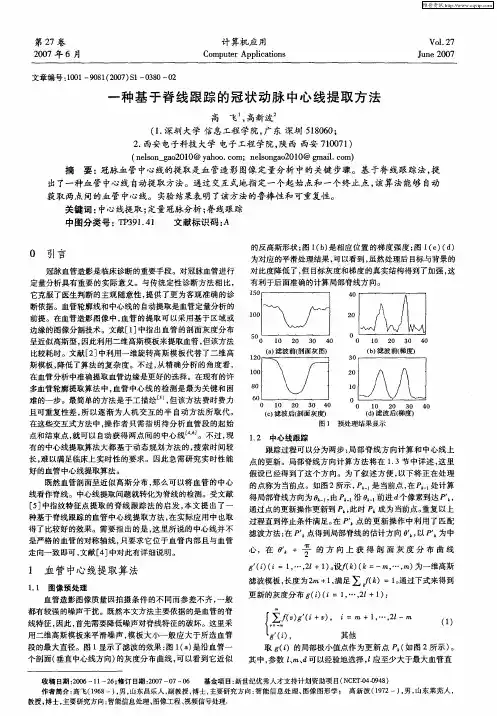
1 血管中心线提取算法1.1 图像预处理血管造影图像质量因拍摄条件的不同而参差不齐,一般都有较强的噪声干扰。
既然本文方法主要依据的是血管的脊线特征,因此,首先需要降低噪声对脊线特征的破坏。
这里采用二维高斯模板来平滑噪声,模板大小一般应大于所选血管段的最大直径。
图1显示了滤波的效果:图1(a )是沿血管一个剖面(垂直中心线方向)的灰度分布曲线,可以看到它近似的反高斯形状;图1(b )是相应位置的梯度强度;图1(c )(d )为对应的平滑处理结果,可以看到,虽然处理后目标与背景的对比度降低了,但目标灰度和梯度的真实结构得到了加强,这有利于后面准确的计算局部脊线方向。
图1 预处理结果显示1.2 中心线跟踪跟踪过程可以分为两步:局部脊线方向计算和中心线上点的更新。
局部脊线方向计算方法将在1.3节中详述,这里假设已经得到了这个方向。
为了叙述方便,以下将正在处理的点称为当前点。
如图2所示,P k -1是当前点,在P k -1处计算得局部脊线方向为θk -1,由P k -1沿θk -1前进d 个像素到达P ′k ,通过点的更新操作更新到P k ,此时P k 成为当前点。
重复以上过程直到停止条件满足。
在P ′k 点的更新操作中利用了匹配滤波方法:在P ′k 点得到局部脊线的估计方向θ′k ,以P ′k 为中心,在θ′k+π2的方向上获得剖面灰度分布曲线g ′(i )(i =1,…,2l +1)。
设f (k )(k =-m ,…,m )为一维高斯滤波模板,长度为2m +1,满足∑kf (k )=1。
通过下式来得到更新的灰度分布g (i )(i =1,…,2l +1):∑mv =-mf (v )g ′(i +v ),i =m +1,…,2l -mg ′(i ),其他(1)取g (i )的局部极小值点作为更新点P k (如图2所示)。
其中,参数l 、m 、d 可以经验地选择,l 应至少大于最大血管直第27卷2007年6月计算机应用Computer App licati onsVol .27June 2007径,d 的选择以小于血管的半径为宜。
图2 中心线跟踪过程假设血管的方向是连续变化的[7]。
设P k 是当前点,假如在P k 算得的局部脊线方向与方向P k -1P k 的差超过某一上限λ(选λ=π4),认为算得的方向不可靠,此时可以利用图3的方法跟踪下一个点。
由P k 沿P k -1P k 前进距离d 到达P ″k +1,依据前面的方法,在垂直于P k -1P k 的方向上把P ″k +1更新到P ′k +1,再在垂直于P k P ′k +1的方向上更新到P k +1,此时将P k +1设为当前点,继续下面的过程。
图3 辅助跟踪方法1.3 局部脊线方向计算确定局部脊线方向主要依据梯度信息。
但仅计算一点的梯度方向作为脊线方向显然是不可靠的。
这里以当前点P k 为中心,选择一个大小为2W +1的窗,利用窗中所有点的梯度的综合信息,通过式(2)计算方向,这里的是垂直于局部脊线的方向。
θ=12tan -1∑wi =1∑wj =12Gx(i,j )G y (i,j )∑w i =1∑wj =1[G2x(i,j )-G 2y (i,j )](2)式(2)是依据最小均方准则推导出的,这里不作进一步说明,文献[5]的附录中对此有详细介绍。
这里W 的选择应小于血管半径,G x 和G y 分别为x 和y 方向的梯度。
值得注意的是,脊线的实际方向有两种选择θ+π2或θ-π2,这时可利用以下两条规则作判断:(1)起始方向由起始点和结束点共同决定。
(2)中间跟踪过程依据方向的连续性来作选择,即在θ+π2和θ-π2中选最接近上一次跟踪方向的那一个作为当前的方向。
1.4 停止条件当前点足够接近结束点时,就认为已经到达了结束点,设P k 为当前点,P end 为结束点,D ()为距离算子,则在满足式(3)的条件下跟踪停止:D (P K ,P end )≤ε(3)这里ε=d /2。
可以看出,交互式给定的起止点主要起两个作用,一是确定起始方向,二是计算结束条件。
当到达结束点后,用直线把检测到的所有点连接起来,由于点之间的距离相当小,所以直线上的点不会在血管外。
然后经过简单的平滑滤波处理就可以达到一条光滑的血管中心线。
需要指出的是,前面的叙述中为了强调某种含义同时使用了中心线和脊线两个概念,它们实际是相同的。
2 实验结果与分析为了验证本文提出的血管中心线提取算法的鲁棒性和结果的可重复性,分别进行了以下两组测试实验。
实验1 选用了71张不同质量的血管造影图像,按图像质量将它们分成3个等级:Poor 、Mediu m 、Good,数量分别是30,30,11。
再通过加不同程度的噪声来考查算法对噪声的敏感性,所加噪声为高斯白噪声,均值为0,方差分别为:0.01、0.02、0.03。
表1记录了在不同情况下算法执行成功的次数和占图像总数的比率。
图4给出了一个执行结果。
表1 I m age class/ite m σ2=0σ2=0.01σ2=0.02σ2=0.03Poor (30)2419115Medium (30)27282019Good (11)1110109Total (71)62574133Percent (%)87.380.3057.7546.48从表1中可以看出,在没有叠加噪声的情况下,不同质量图像算法执行的平均成功率达到了87%,对普通质量和较好质量的图像成功率都在90%以上。
而微弱的噪声对结果的影响并不大,说明了算法对不同质量的图像具有一定的适应性,对噪声的鲁棒性较强。
图4 执行结果图5 不同起始点的9条中心线实验2 在本文方法中,提取到的中心线取决于起始点和结束点的选择。
从前面的说明可知,结束点主要用来控制算法的中止条件,对结果影响并不大,因而结果主要取决于起始点的选择。
这里让起始点在一个小的区域内变化,通过考查输出结果的变化情况来了解算法的可重复性。
这里在某个区域内选用下面9个点作为起始点:(x +i,y +i )(i =-3,0,3;j =-3,0,3)。
图5在同一幅图像中显示了9条提取到的中心线,可以看到,除了在起始处有比较大的区别外,中间部分9条线基本重合在了一起,这证明了算法结果的可重复性。
3 结语从实验结果看,本文方法对质量比较差的图像执行的效果还不够好。
在应用中,对交互式指定的起止点,虽然不要求一定要在中心,但尽量靠近中心可以增加执行的成功率。
另(下转第384页) 1836月高飞等:一种基于脊线跟踪的冠状动脉中心线提取方法单元节点内分别插入三块嵌入式工业控制计算机卡和使用两条总线进行网络传输。
测试条件:监控对象相同,分别监控相同的列车运行设备;运行环境相同,模拟列车运行环境,增加较强的电磁和振动等外部干扰。
运行时间相同,共计测试运行10个月。
测试结果如表1所示。
从表中可以看出,采用本方法可以极大的提高列车网络监控系统的可靠性。
图4 列车网络监控系统可靠性试验环境表1 系统故障和失效测试结果表实效类型第一组第二组第三组第四组节点内故障(次)282720通信失效(次)191171网关失效(次)8194 结语列车网络监控系统的基本任务是保证行车安全和提高运输效率。
列车网络监控设备出现故障时,会降低运输效率,甚至可能造成重大的人员伤亡和财产损失事故。
本文分析了能够提高列车网络监控系统可靠性的TC N (W T B /MVB )总线的两模冗余模式以及处理单元的三模冗余软硬件方法,并在此基础上设计了基于TC N (W T B /MVB )总线的系统体系结构。
最后采用全局级和局部级两级调度技术及其相应的调度算法保证了所有不同性质的列车网络监控任务都能得到真正实时、可靠执行。
参考文献:[1] I EC 6137521[S].Electric Rail w ay Equi pment 2Train Bus Part I :TrainCommunicati on Net w ork,1999.[2] ADTRANZ .MVBC01Multifuncti on Vehicle Bus Contr oller Data Sheet[Z].S witzerland:AD tranz,1999.[3] SCH I FERS C,HANS G .I EC 6137521and U I C 5562internati onalstan 2dard for train communicati on [A ].Vehicular Technol ogy Conference Pr oceedings 2000[C ].2000.[4] EDWARDS S,LAVAG O L,LEE EA.Design of e mbedded system s:for mal models,validati on,and synthesis [A ].Pr oceedings of the I EEE[C ],1997,85(3):366-390.[5] KI RRMANN H.The I EC true communicati on net w ork [A ].16th con 2ference on trans portati on syste m s[C ].1996.[6] G M I CHELL R,G UPT A K .Hardware /s oft w are co 2design of e mbeddedsyste m s[J ].Pr oceedings of the I EEE,1997,85(3):349-365.[7] BATE L,L I U S .Real 2ti m e e mbedded syste m s[J ].Computing &Pr o 2gra mm ing,1999,(2):21-25.[8] KI M YJ.The p resent state of technol ogy devel opment in high s peedtrains[A ].KI EE summer conference[C ].1998.[9] ADT RANZ .Contr ol and co mmunicati on syste m technical descri pti on[Z].S witzerland:adtranz,1999.[10]F AN Z M ,T ONG L,L I U D,et al .A New Multi 2port Me morier withGl obal Share and Feebleness Conflict Access [A ].E DSSC ′03[C ].2003.(上接第381页)外,对中间有交叠的血管(被其他血管干扰),算法容易失败。