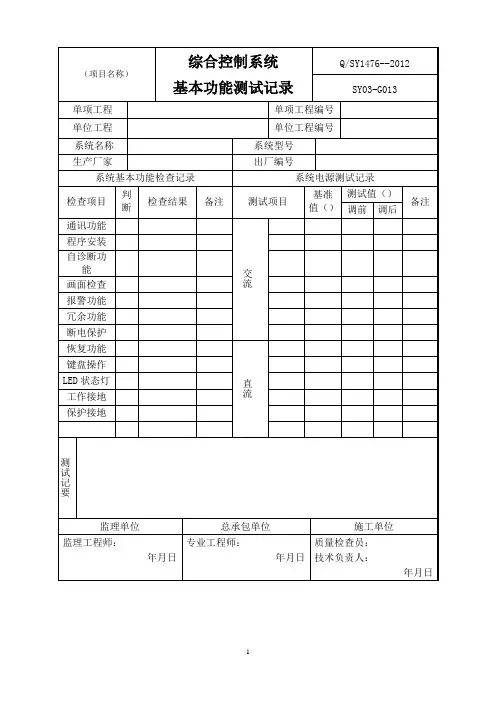
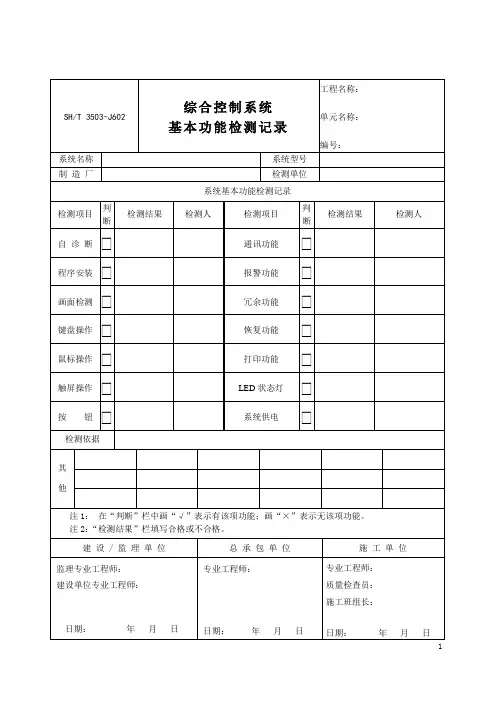
综合控制系统基本功能测试记录
- 格式:doc
- 大小:61.00 KB
- 文档页数:1

工作台自动往复控制线路设计考核记录随着科技的快速发展,自动控制系统在各行各业中的应用越来越广泛。
其中,工作台自动往复控制线路设计一直备受关注。
在这篇文章中,我将就工作台自动往复控制线路设计进行全面评估和深入探讨,以便读者能够全面理解这一主题。
一、概述工作台自动往复控制线路设计主要是指在工业生产中,通过控制系统实现工作台的自动来回运动,以提高生产效率和减少人力成本的一种技术。
其核心在于设计合理的控制线路,确保工作台能够稳定、精准地进行往复运动。
二、控制系统组成1. 传感器传感器是控制系统的输入设备,用于感知工作台的位置、速度和加速度等参数,为控制系统提供反馈信息。
在工作台自动往复控制线路设计中,传感器的选择和布置对系统性能至关重要。
2. 控制器控制器是控制系统的“大脑”,负责对传感器的信号进行处理,并输出控制信号调整工作台的运动。
合理的控制器设计可以提高系统的稳定性和响应速度。
3. 执行机构执行机构是控制系统的输出设备,根据控制器的指令驱动工作台进行往复运动。
在设计执行机构时,需要考虑其工作台的负载和运动要求,确保其具有足够的力量和精度。
三、控制线路设计考核记录1. 确定运动规律在工作台自动往复控制线路设计中,首先需要明确工作台的运动规律,包括往复运动的速度、加速度、停留时间等参数。
这些参数将直接影响到控制线路的设计和执行机构的选择。
2. 选择合适的传感器根据工作台的运动规律,选择合适的传感器进行位置、速度和加速度的检测。
常用的传感器有光电传感器、编码器、加速度传感器等,其选择应根据具体的工作台要求和环境条件进行考量。
3. 设计控制算法控制算法是工作台自动往复控制线路设计的核心,其设计应能保证工作台运动的稳定性、精度和响应速度。
在设计控制算法时,需考虑传感器信号的滤波、控制器的参数整定和执行机构的输出特性等因素。
4. 考虑系统安全工作台自动往复运动过程中,系统安全是至关重要的考虑因素。
设计控制线路时,需考虑急停措施、限位保护、过载保护等安全功能,确保工作台在异常情况下能够及时停止并保护操作人员和设备的安全。
综合实验报告实验名称自动控制系统综合实验题目指导教师设计起止日期2013年1月7日~1月18日系别自动化学院控制工程系专业自动化学生姓名班级 学号成绩前言自动控制系统综合实验是在完成了自控理论,检测技术和仪表,过程控制系统等课程后的一次综合训练。
要求同学在给定的时间内利用前期学过的知识和技术在过程控制实验室的现有设备上,基于mcgs组态软件或step7、wincc组态软件设计一个监控系统,完成相应参数的控制。
在设计工作中,学会查阅资料、设计、调试、分析、撰写报告等,达到综合能力培养的目的。
目录前言 (1)第一章、设计题目 (2)第二章、系统概述 (2)第一节、实验装置的组成 (2)第二节、MCGS组态软件 (7)第三章、系统软件设计 (10)实时数据库 (10)设备窗口 (12)运行策略 (15)用户窗口 (17)主控窗口 (26)第四章、系统在线仿真调试 (27)第五章、课程设计总结 (34)第六章、附录 (34)附录一、宇光智能仪表通讯规则 (34)第一章、设计题目题目1 单容水箱液位定值控制系统选择上小水箱、上大水箱或下水箱作为被测对象,实现对其液位的定值控制。
实验所需设备:THPCA T-2型现场总线控制系统实验装置(常规仪表侧),水箱装置,AT-1挂件,智能仪表,485通信线缆一根(或者如果用数据采集卡做,AT-4 挂件,AT-1挂件、PCL通讯线一根)。
实验所需软件:MCGS组态软件要求:1.用MCGS软件设计开发,包括用户界面组态、设备组态、数据库组态、策略组态等,连接电路,实现单容水箱的液位定值控制;2.施加扰动后,经过一段调节时间,液位应仍稳定在原设定值;3.改变设定值,经过一段调节时间,液位应稳定在新的设定值。
第二章、系统概述第一节、实验装置的组成一、被控对象1.水箱:包括上水箱、下水箱和储水箱。
上、下水箱采用淡蓝色优质有机玻璃,不但坚实耐用,而且透明度高,便于学生直接观察液位的变化和记录结果。
球杆控制定位系统实验报告实验小组成员:周开城u200910555 机械0902班张伟u200910571 机械0902班一实验目的(1)掌握对实际物理模型的建模方法。
(2)掌握在Matlab 中利用Simulink 等工具对系统进行模型分析的方法。
(3)掌握PID 控制算法的原理和实际应用。
(4)学习PID参数的调节方法。
二实验系统及实验原理(一)球杆系统的特点球杆系统是一个典型的非线性系统,理论上而言,它是一个真正意义上的非线性系统,其执行机构还具有很多非线性特性,包括:♦死区♦直流马达和带轮的传动非线性。
♦位置测量的不连续性。
♦导轨表面不是严格的光滑表面,产生非线性阻力。
这些非线性因素对于传统意义上的测量和建模造成很大的影响,并对系统的控制性能造成非常大的影响,怎样去设计一个鲁棒的控制系统,是现代控制理论的一个重要问题。
固高科技提供的球杆系统既可以用于研究控制系统运行的非线性动力学,也可以用于研究控制系统的非线性观测器等,是一个较为通用的实验设备。
因为系统机械结构的特点,球杆系统具有一个最重要的特性——不稳定性,对于传统的实验方法,存在一些实验的难处,不稳定的系统容易对实验人员产生危险或是不可预料的伤害,球杆系统相对而言,机械比较简单,结构比较紧凑,安全性也比较高,是一个可以避免这些危险和伤害的实验设备。
采用智能伺服驱动模块和直观的Windows程序界面,是控制系统实验的一个理想的实验设备。
(二)球杆系统如图1所示,包括控制计算机、IPM100伺服驱动器、球杆本体和光电码盘、线性传感器、伺服电机和球杆装置等部分,组成一个闭环系统。
光电码盘将杠杆臂与水平方向的夹角、角速度通过RS232接口与计算机通信。
在控制系统中,输入钢球的控制位置和控制参数,通过控制决策计算输出电机转动方向、转动速度、加速度等,并由智能伺服驱动器产生相应的控制量,发出模拟信号使电机转动,带动杠杆臂运动从而控制球的位置。
本系统为一个单输入(电机转角θ)、单输出(钢球位置x)系统。
1.1平台功能1.1.1平台基础功能1・1・1.1实时视频、过车监控功能智能交通综合管控平台作为视频监控综合管控平台,具备强大而便捷的视频监控及控制功能,主要能够实现视频监控前端的接入、访问,视频的实时浏览、回放以及云台控制等功能。
1,1・1,2统计功能统计功能是系统对前端所采集的往来车辆数据信息进行分类汇总,并根据不同的业务单元的要求,以不同的形式出具统计报表,挖掘隐藏在数据背后的信息。
目前系统能够对单路口、多路口、以及不同时段的车流量进行统计,并出具柱状、曲线或列表形式的日报、周报、月报和年报表。
1,1・1.3布控管理布控功能需要通过前端抓拍点位与平台数据库相互配合,以最短的时间查找到目标对象(车辆、人员等)。
通过上级单位提供的布控数据(通常是车牌号、车辆其他属性特征、人员身份及其他特征信息),综合管控平台能够将各前端采集点所采集的车辆、人员信息与布控数据比较,用以发现布控车辆,并通过平台客户端、所连接的外部设备发出通知、提示信息。
通过布控管理界面能够实现布控配置、红名单配置、批量布控以及撤控的操作,用户能够添加、撤销布控信息,并可选不同的布控方式。
平台高级功能中支持多种布控方式,包括单一车辆布控、单双号布控、单行线布控、限时禁行布控、反向布控、强力布控等。
1・1.1.4运维管理功能智能交通综合管控平台具备运维管理功能,从平台角度而言,在实现前端点位接入并统一管理的基础上,能够实时获取设备在线状态,并当设备异常离线、网络故障时及时报警。
平台通过各类软、硬件模块支持外部报警输入接口,智能交通综合管控平台断电报警接口用户能够通过运维管理功能界面,实时了解系统及其中的各设备当前的运行状况,当系统或设备运行异常时,系统能够将异常的情况反映在信息提示列表中,用户就能够根据异常设备的情况及时采取维护措施。
1・1,1.5外部设备控制应用功能交通综合管控平台作为多功能应用的软件平台,执行常规的业务应用流程,将数据分析、处理的结果以不同形式予以展现。

系统调试1、仪表调试工程使用工具:1)信号发生器。
精度0。
1级, 规格:0~50mA直流和0~20V直流. 2)直流十进位电阻箱。
精度0.2级,规格0。
01~9999。
99Ω。
3)电位差计。
精度0。
1级,规格:0~1000mV直流.4)双臂电桥.精度0。
1级。
5)精密电阻箱。
精度0.02级。
6)减压过滤器(气动).规格为0~4×105Pa.7)定值器(气动)。
规格为0~4×105Pa。
8)万用表。
9)数字电压表。
10)数字万用表.11)地阻测试仪。
12)游标卡尺.13)活动扳。
14)螺丝刀。
15)秒表。
16)兆欧表.17)转速校验仪(30~40000r/分钟,标准表误差±0.5%)18)数字测试仪(1~100kHz,精度1/10000,传感器误差一个数)19)低频信号发生器(0~20∨,0~200kHz)20)精密铂铑-鉑热电偶(300~1100℃±1℃)21)Ⅱ级鉑热电阻(0~500℃,-200~0℃)22)数字标准压力表(0~2.5、0~6、0~16、0~25、0~40kPa,0.1级)23)现场仪表校验仪(4~20mA,0、25%、50%、75%、100%可调) 24)频率信号发生器(220∨AC,0~10kHz可调)2、作业条件:1)仪表在安装前应进行单体的调校和检查。
2)仪表安装以后在投入使用前,必须进行系统(包括线路或管路在内)的调试。
其目的是:a)检查系统中各仪表间的连接管路或线路是否正确可靠,消除漏、堵、断、短、错等缺陷。
b)检查仪表到安装到现场后,是否遭损坏,可调部分是否有变动,以保证仪表应有的精确度。
c) 模拟工艺操作信号,联动调试全系统内各单元仪表,按设计要求整定值及调节器、执行器的方向。
3)仪表的工作条件和试验条件应符合如下要求:a)工作条件:周围空气温度:电动仪表0~50℃,气动仪表5~40℃,变送器-10~55℃,b)周围空气相对湿度:电动仪表不大于85%.气动仪表10%~90%.变送器10%~90%.基地式仪表10%~90%。
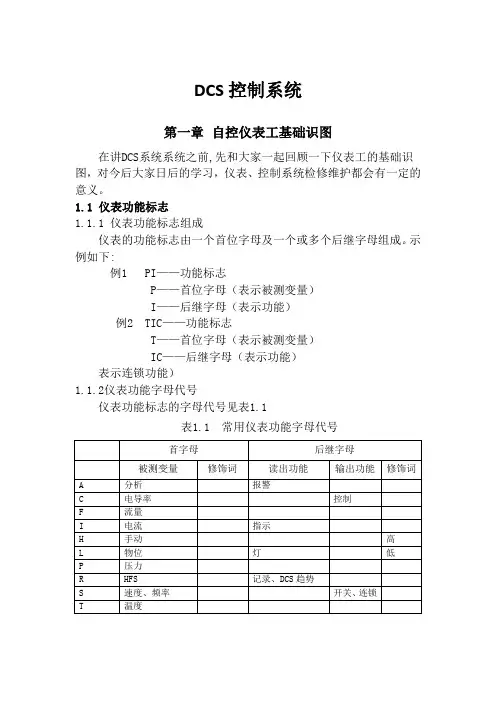
DCS控制系统第一章自控仪表工基础识图在讲DCS系统系统之前,先和大家一起回顾一下仪表工的基础识图,对今后大家日后的学习,仪表、控制系统检修维护都会有一定的意义。
1.1 仪表功能标志1.1.1 仪表功能标志组成仪表的功能标志由一个首位字母及一个或多个后继字母组成。
示例如下:例1 PI——功能标志P——首位字母(表示被测变量)I——后继字母(表示功能)例2 TIC——功能标志T——首位字母(表示被测变量)IC——后继字母(表示功能)表示连锁功能)1.1.2仪表功能字母代号仪表功能标志的字母代号见表1.1表1.1 常用仪表功能字母代号1.2 仪表检测流程图常见图形符号 1.2.1 常用仪表流程图符号及其含义a) 常规仪表b) 引入计算机或DCS 控制系统仪表1.3 仪表检测流程图识图MFRISA 30101MMPRISA 30102TSA 30103PIS 30104PIS 30105HL图1.1 工艺检测控制流程图1.4 仪表接线图识图(略)第二章 计算机控制系统及DCS 基础知识集散控制系统(Distributed Control System, DCS)是计算机控制系统的一种结构形式。
计算机控制是以自动控制理论和计算机技术为基础的,自动控制理论是计算机控制的理论支柱,计算机技术的发展又促进了自动控制理论的发展与应用。
计算机控制系统有多种结构形式,DCS就是其中的一种。
2.1 计算机控制系统基础知识2.1.1 计算机控制系统的一般概念计算机控制是关于计算机技术如何应用于工业生产过程自动化的一门综合性学问。
计算机控制的应用领域是非常广泛的,从计算机应用的角度出发,工业自动化是其重要的一个领域;而从自动化的领域来看,计算机控制系统又是其主要的实现手段。
可以说,计算机控制系统与用于科学计算及数据处理的一般计算机是两类不同用途、不同结构组成的计算机系统。
计算机控制系统是融计算机技术与工业过程控制于一体的综合性技术,它是在常规仪表控制系统的基础上发展起来的。
煤矿综合自动化系统维护目录第一章系统架构................................................................................................................ - 3 - 第二章组态王KingView 6.53的安装与维护 ................................................................. - 6 - 第三章工业库King Historian 6.5的安装与维护 ............................................................ - 7 - 第四章数据采集器OPC Collector的安装与维护 ........................................................ - 11 - 第五章集控中心触摸屏监控系统的安装与维护.......................................................... - 12 - 第六章集控中心的安装与操作说明.............................................................................. - 13 - 第七章集控中心WEB发布的安装与使用说明........................................................... - 14 - 第八章分布式子系统数据采集的详细配置.................................................................. - 17 -第一章系统架构集中监测与控制系统在煤矿综合自动化系统和安全生产管理信息化系统中起着承上启下的作用。