ENGEL注塑机机械手操作说明书
- 格式:pdf
- 大小:2.70 MB
- 文档页数:52

注塑机机械手说明书3、编程3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键3-1 File:CNC4-3C3、编程按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大3-2 File:CNC4-3C3、编程编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
3-3 File:CNC4-3C3、编程2) 速度按键进入速度设定。
3) 计时按键进入延时功能设定。
3-4 File:CNC4-3C3、编程4)一般I/O按键进入侧姿回正等选择。
5) 成型I/O按键进入成型相关条件设定。
3-5 File:CNC4-3C3、编程6) 治具I/O按键进入治具相关功能设定。
7) 周边I/O按键进入周边相关功能设定。
3-6 File:CNC4-3C3、编程8) 回圈按键进入循环功能设定。
9) 跳跃按键进入跳转功能设定。
3-7 File:CNC4-3C3、编程10) 停止按键进入程序完成设定。
11) 宏按键进入调用已经编好的子程序。
编号为0~99共100个。
3-8 File:CNC4-3C3、编程12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3-9 File:CNC4-3C3、编程3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面3-10 File:CNC4-3C3、编程点击档案按钮进入如下画面按钮,切换到如下画面在此页点击3-11 File:CNC4-3C3、编程点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
航天机械手SHNM3/5系列安全操作及日常维护规程1.0目的:熟练进行规范化操作,确保人员及设备的安全。
2.0适用范围:航天SHNM3/5机械手的安全操作及日常维护。
3.0职责:3.1设备使用车间:负责严格按照文件规定进行操作及日常维护,辅助维修员进行设备维修保养工作。
3.2设备管理部:负责监督检查使用部门的设备使用情况,并组织实施设备维修及维护保养。
4.0工作程序:4.1开机前检查:4.1.1确认短路航插接头已拔下(图1),电源开关打开(图2)。
4.1.2检查确认气阀已经打开(图3)4.1.3在启动机械手之前,确认机械手可动范围内没有人员,且没有障碍物。
4.1.4检查确认注塑机已打开机械手使用功能。
4.2 安全操作:在4.1项所有检查均无异常时方可进行如下操作。
4.2.1航天机械手电控系统布局图,操作使用流程图(见图4、图5)5.0操作注意事项:5.1机械手运转中,人不可站在机械手落下或动作的范围内,不可把手或其它的物体伸入机械手动作的安全范围内。
5.2在生产中机械手运转发生异常,如有异常响声或滑动不顺应立即停止,及时通知相关负责人。
5.3在不使用机械手时,必须把机械手臂置于安全位置,以防机器震动时手臂落下而损坏。
5.4操作时,请勿以沾满油污或潮湿的手触摸操作键盘,以防损坏键盘或造成电击事故。
5.5操作人员必须经过本操作规程培训后方可上岗。
图2图1图3图46.0日常维护:6.1清洁机台环境和工作环境,要求设备表面无灰尘,无油污,周围无杂物。
6.2 检查吸盘或夹具,各气管无漏气现象。
(见图6)6.3检查清理滑轨槽内油污及灰尘。
(见图7)6.4检查确认工作时灵活无卡滞,无异常声响振动,如出现异常情况,及时通知相关负责人。
7.0相关文件、记录:7.1《航天机械手日常点检表》图7图6。
机械手操作说明书一、简介机械手是一种自动化设备,通常用于重复、高精度的工业操控。
它由多个关节和执行器组成,可以模拟人手的动作,并在工业生产线上完成多种任务。
本操作说明书将为您提供机械手的基本操作步骤和注意事项。
二、安全操作1. 在操作机械手之前,请确保您已经接受过相关培训,并理解机械手的工作原理和操作规程。
2. 在操作机械手时,请穿戴好防护设备,如手套、护目镜等,以确保自身的安全。
3. 请确保机械手所处的工作环境符合安全要求,如地面干燥、通风良好等。
4. 不要尝试修理机械手的内部零部件,如果出现故障,请及时联系维修人员。
三、机械手操作步骤1. 开启机械手的电源,并确保电源指示灯已亮。
2. 操作控制器,选择合适的程序或模式,以实现所需的操作。
3. 通过控制器上的按钮或摇杆,控制机械手的关节和执行器进行动作。
4. 监视机械手的运动过程,确保它能够准确地执行所需的任务。
5. 在操作完成后,关闭机械手的电源,并将控制器放置在适当的位置,以防止损坏或误操作。
6. 定期清洁机械手的表面,确保其正常运行,并使用合适的润滑剂,保持关节的灵活性。
7. 如遇到故障或异常情况,请及时报告给上级或维修人员,不要擅自进行修理。
四、操作注意事项1. 避免将手或其他物体靠近机械手的活动部件,以避免夹伤或划伤。
2. 不要超过机械手的工作负荷范围,过载可能会导致机械手的损坏或事故发生。
3. 在移动机械手时,要先确保周围没有人员或障碍物,以免发生意外碰撞。
4. 当机械手执行任务时,请远离其工作范围,以免受伤。
5. 勿将机械手用于不适合的环境或任务,以免造成损坏或安全风险。
五、维护和保养1. 定期检查机械手的零部件,包括关节、执行器、传感器等,如有损坏或磨损,请及时更换。
2. 确保机械手的电气系统正常工作,如有异常,请及时检修或更换电气元件。
3. 定期清洁机械手的内部和周围的工作区域,以去除积尘、油污等物质。
4. 根据生产计划和实际使用情况,对机械手进行定期保养,包括润滑、调整等工作。
恩格尔注塑机操作规程:一)开机前准备:1.检查机器有无漏油.2.打开冷却水阀门并检查有无漏水.3.检查油位是否正常(油位计浮标应在三分之二位置)4.清除一切杂物及料头,将使用工具放在安全位置,不要阻碍机器移动部位正常工作.5.检查料斗有无所需原料.6.检查安全门,紧急停止装置工作是否正常.二)开机:1打开主电源开关(机器尾端)2.启动机器控制电源(打开操作面板上的电源开关.注意不要频繁开,关此开关,两次启动间隔时间必须在三秒以上.)3.等到控制电脑自检结束并进入正常操作界面后检查当前机器使用的模具参数是否是你需要的参数.4.进入登录界面,利用权限卡进行正常操作.5.读取你所需要的模具参数,如果当前模具参数就是你所需的参数,你可以不需要操作这一步.6.打开加热开关,启动马达,等待油温升到设定值.(机器没有了大的噪音时油温就正常了)三)制样前的准备(自动运行前的准备)1.安装动模芯(也就是你需要的样条模型).在模芯盒中找出你所需要的样条模型,右手抓住模芯的手柄,左手戴上防护手套并托住模芯放到动模安装滑槽中,然后松开左手,用左手扣住固定销手柄拉开固定销,右手用力推动模芯进入动模,松开固定销手柄,此时手柄复位.安装完成.(注意:如果固定销手柄没有缩回,模芯就没有安装正确)2.调整模厚:关上安全门,触动触摸屏上的合模图标的下一级,模厚图标并触动□标记,屏幕会跳出一选择视窗,然后选择√,接着按动操作面板上的绿色按钮,自动模厚调整启动,等到□标记中的√消失,模厚调整完成.3.打开模具到设定的开模位置:开:触动触摸屏上的调试图标(此图标变亮)进入调试模式,按住开模触摸键直到模具自己停止.4.检查并清洁模芯.打开安全门,查看两模芯表面应光亮没有污渍,如有就用柔软的物质沾上洗模水擦净.或将洗模水喷洒在模芯上,然后用柔软的物质擦拭.之后,关上安全门.5.检查原料溶融是否正常.打开注射台端安全门,推入料斗到料筒下料口位置并锁紧.检查料筒温度是否达到设定的数值,以及均化过程是否已完成,没有报警出现.关上安全门,确认射台在导轨后端,按住塑化触摸键到螺杆位移停止.然后按住注射触摸键将原料射出,打开安全门检查原料状态是否溶融正常.清除料头.四)制样:1.设定样条数量:触动触摸屏使操作界面位于生产界面,在工件设定值后面设定所需样条数量.2.启动模温控制器:打开模温控制器电源开关,检查水管接头有否漏水.水循环是否正常.3.开始制样:确认模具已在开模行程位置,螺杆位置已在塑化行程位置,全部的安全门已在关闭位置,操作界面没有警报,然而按动操作面板上的绿色按钮.制样过程开始.4.制样结束:机器将会根据你的设定自动完成制样过程.当完成制样后,机器会停止自动运行,报警灯会闪烁,马达将会在三分钟后关闭.如果你需要继续制样,请旋转操作面板上的PU键进行机器状态复位,然而重复制样过程.五.暂停.如果第一次制样工作结束,需要等待一段时间才进行第二次制样,请进行此操作:1将模具合上::触动触摸屏上的调试图标(此图标变亮)进入调试模式,按住闭模触摸键闭合模具到动模与定模相距2-5mm停止.2.关闭模温控制器电源.3按动射台后退键将射台停于最后的位置.4.料管降温。
2.操作说明2.1 开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home 键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2 关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3 IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“馬達強制激磁”,按键,反方向操作轴寸动。
注塑机机械手使用方法注塑机机械手是一种用于注塑机操作和自动化生产的设备。
它具有精确的定位控制,高效的作业速度和稳定的运行性能,被广泛应用于制造业的各个领域。
下面将详细介绍注塑机机械手的使用方法。
一、安装调试1. 检查注塑机机械手的外观和内部结构,确认设备完好无损。
2. 将机械手安装在注塑机旁边的工作台上,确保机械手与注塑机之间有足够的操作空间。
3. 将机械手的电源线和控制线连接到对应的电源和控制系统上。
4. 根据注塑机的参数设置,对机械手进行调试和校准,确保它能够准确地抓取注塑件并进行操作。
二、操作流程1. 开机准备a. 打开注塑机和机械手的电源开关。
b. 启动注塑机和机械手的控制系统,并进行初始化。
c. 清理注塑机的工作台和周围环境,确保工作环境整洁。
2. 参数设置a. 根据注塑件的尺寸、重量和工艺要求,设置机械手的抓取和操作参数,包括抓取点坐标、速度、力度等。
b. 根据生产任务的要求,设置机械手的作业模式,如单循环操作、连续运行、自动换模等。
3. 作业操作a. 手动操作:通过控制面板或操作手柄控制机械手进行手动操作,包括移动、抓取、放置等。
进行手动操作时,需要操作员具备相关技术和经验,确保操作安全和准确。
b. 自动化操作:通过预设程序和触发信号,实现机械手的自动化操作。
操作员只需设置好注塑机和机械手的参数,启动自动操作模式,机械手将按照预设程序进行操作,减少人工干预和提高生产效率。
4. 监控和调试a. 在操作过程中,及时监测机械手的运行状态和作业效果,如抓取力度、抓取准确度等。
如有异常或问题,及时进行调整和修复。
b. 定期对机械手进行保养和维护,清洁抓取爪、油润滑系统、检查电气部件的连接情况等,确保设备的正常运行和延长使用寿命。
5. 安全操作a. 在操作注塑机机械手时,操作员应严格按照操作规程进行操作,遵守安全生产规范。
b. 在进行机械手操作前,确保注塑机停止工作,避免误操作引起事故。
6. 故障排除a. 如果机械手出现故障或异常,及时停机排除故障,避免对生产环节造成影响。
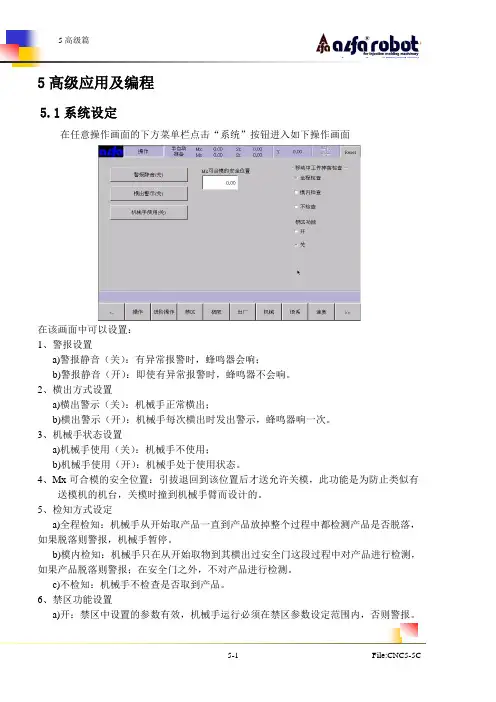
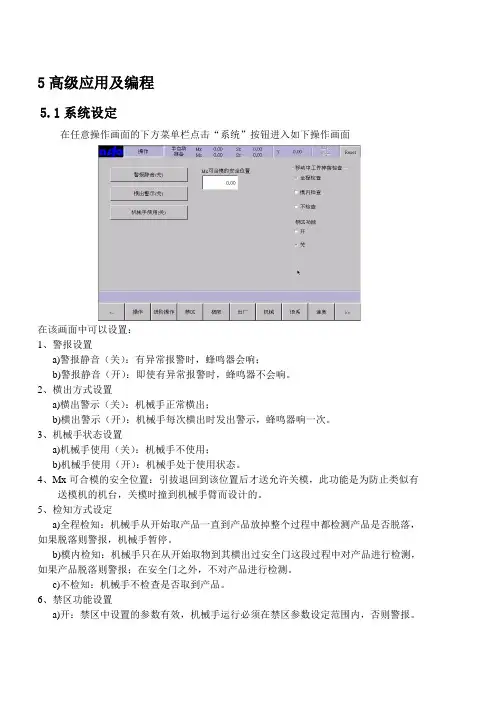
5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
第一章:操作面板操作面板组成分为三部份,第一部份是萤幕显示画面,由10.4”之LC或彩色TFT组成,第二部份是按钮,有ESC 及F1~F8 及次页等选择按钮,有数字输入按钮,有亮点控制方向按钮,及手动控制按钮,功能选择按钮等.第三部份是旋转式控制开关如电源开关及马达开关,电热开关等.第一节:亮点控制钮此上下左右四个箭头按钮可以控制显示屏的亮点上下移动,移动亮点到我们希望输入那行数值的位置後,才有可能输入新的数值,此控制尚有两个页面下翻或上翻按钮可以按选下页画面或上一页画面.第二节:数字输入按钮有数字0~9及小数点,正值,负值,上昇,下降等按纽,按下此数字後可在显示屏上相对应看到我们输入的值.第三节:其它功能按钮ENTER 输入按钮,当按入数字後选按此ENTER则数值输入电脑.我们可以看到亮点位置之值已被新数值代替,如此则完成数值输入.CLEAR 数字按入後若希望改变则按下此CLEAR钮,会清除我们所按入的数字,便可以重新按入新数值.向下双箭头:当按下ENTER後同样数字值可以被输入於下一个值中,按下此双箭头便是将上一次ENTER之同值输入新亮点位置.带有叉叉之三角惊叹号错误显示标志,若有错误警报,则每按下此纽一次,便清除最上面一个错误状况,但是若尚位解除此错误,则此错误警报便会再出现於最下行的警报位置.第四节:输入控制钥匙此钥匙有OFF位置:不能变更显示屏上所有之值,不允许输入新值,此位置只能查看电脑之条件设定值.ON 位置:若钥匙转於此位置则允许输入新值到电脑中,可以改变成型条件或是其它参数.但是不能列印参数於印表机上.PR 位置:钥匙转於此位置除了可以输入数值改变设定外,还可以将利用印表机等作条件列印.要用印表机唯有将钥匙位置转至此.第五节:ESC及F1~F8按钮ESC按钮可跳离目前之状况,或中断现在之功能, F1 ~ F8 按钮则相对应於显示屏之说明功能.此为软体选择钮,会根据不同的动作相对应不同的屏幕选择!第六节:显示屏选择钮,有下列各种选择钮,关模萤幕,开模萤幕,顶出萤幕,射出萤幕,进料萤幕,品质控制萤幕,服务萤幕,萤幕列印钮,中子控制萤幕,模具资讯萤幕,射座萤幕,温度控制萤幕,微型图萤幕,机械手控制萤幕,及特殊功能幕错误报告萤幕等按钮.按下此列按钮可选择一个功能萤幕然後在萤幕上配合说明之F1~F8有其它相关之萤幕可选择.譬如按下关模钮後出现关模控制F1之萤幕,但是仍可以选择F2,F4,F5等按钮查看其它显示幕.第七节:程序选择钮,这里有手动半自动全自动及模厚设定钮及一个特殊程序钮.按下模厚设定钮则萤幕上出现SET UP字样,此时按下手动关模开关可以设定模具厚度.按下半自动钮则萤幕上出现Semiautomatic 字样,表示在半自动状态中.半自动状态每一个循还後便会自动停下来等候再一次周期启动.按下全自动钮则萤幕上出现Fully automatic字样,此时周期完了会自动再执行下一个周期使其循还不已.第二章启动机械第一节:将面板处之电源打开後机械自动自我测试硬体,测试全部之电子基板,输出入基版之电压信号等,测试中出现漏斗状图形请稍待,完成硬体测试後,则出现手掌图形,此时才可以启动马达或操作机械.第二节:打开马达电源控制钮,经过数秒之启动保护时间後,可听到马达转动声音,机械首先判别油温,现在实际油温若低於设定之最低温,则帮浦以设定之高功率高压力运转,以循环加热油温,直到油温达到最低温设定值後,帮浦才会停下高压输出,在高压力输出加热油温情况下,我们可以听到较大的帮浦噪音,此为正常现象.第三节:此时若紧急按钮在按下状态则没有油压力输出必须旋开紧急按钮方可.第四节:各安全门必需关上,否则可能油压亦无输出,不能操做某些手动功能.第五节:在启动马达之前或後我们都可以打开料管加热控制开关,打开电热器开关後料管以我们设定之温度开始加热,因为机械有冷启动加热功能所以会以慢慢加热型态为电热片送电.电热片在停机冷却状态会吸收水份,若是加热时,马上以100%功率送电加热,很容易损坏电热片,所以有此冷启动加热功能,此时机械先送小功率电压到电热片加热其水份,过了数分钟後才以全功率加热.电热片是以PID式控制加热情况,可於设定参数上变更加热系数.第三章操作理念第一节:循还周期我们要先了解成型之周期开始及所执行之程序.周期自关模开始,关模完了执行高压锁模,然後射座前进,如果射座先前已在模具接触位置,则射座已完成前进,开始射出功能并执行多段式射出程序,然後是执行保压时间,保压时间完了後,射座系统侧之螺杆进行进料,模具这边则进行冷却计时,通常冷却时间大於进料所需时间, 冷却时间到了後即执行开模,模具行程到达预定位置後,可以做顶出动作,顶出配合取出机械臂,完成顶出次数及顶针退回最小设定位置,便是一个周期完了.我们按照上列成型程序,思考所要设定的值,然後选择相关之萤幕画面,便容易操作了!第二节:手动程序操作时可独立控制关模’开模’顶出’座进’座退’进料’射出等动作,在选择半自动或全自动程序下,要按下启动钮才会执行周期开始,周期开始必需满足下列条件:1,模具需大於A位置,就是模具实际位置需大於开模行程位置.2,顶出针需退回在小於设定之起点位置方可.3,料温必需到达所设定之上下范围内.4,螺杆位置必需大於C2*值,以上四个条件满足後,才可以执半自动或全自动.此时按下START钮启动机械便开始一个成型周期. 第三节:成型机一般性检查若是液压作动油不够是会警报的,注塑机之液压油一般运作在40~45度C为最洽当黏度,一般可工作约5000 小时或每年更换一次液压作动油.每个月检查油位是否在位准之上.机械上的安全门限位开关不可随意拆卸以免发生危险,有部份客户为了取出产品方便,拆卸下安全门之透明窗部份,更要注意使用安全.机械上的活动部位设有黄油注入孔,请操作者按照机械书之说明找出各个注油嘴,至少每个月需注油一次,以帮助润滑.譬如射座滑轨,进料马达与螺杆间之联结机构,锁模机构滑动部份,联结部份等.机械液压油冷却水之水阀开关需打开,以冷却作动油.及冷却模具等.第四节:成型准备塑胶原料之储放不可受潮,不可受灰尘污染等,成型前需考虑乾燥情况,不同的原料需不同乾燥温度,及所需几个小时之乾燥等.应事先准备材料之乾燥.譬如PC需设定在120度C ,乾燥两小时等,因此要考虑产能选用适当之料斗容量,以备足够之乾燥需要.模具温度影响成型品之收缩率,及表面平面度光亮度,成型如PC’PMMA’POM 等高级工程塑料需模具加温,应在成型前准备模温控制机,将模具昇温至适当目标值.不同大小及使用不同塑料之模具,需要适当的加热瓦特数模温控制机.一般模具昇温最大应在40分钟内达到目标值,以备生产.塑料在料管中加热到达可成型状态需时二十分中左右,不同的塑料需设定其适当的料管加热温度,应事先了解该塑料之物理性, 了解此种塑料在使用上应将料管之每个加热段设定在几度C.第五节:模具厚度设定将模具吊入机械中需注意安全,锁紧模具需平均用力於每个固定螺丝,螺丝之螺牙需符合机械之牙距,螺丝用力前需已深入机械模板中,以免模板崩裂,机械之螺牙孔中需加点黄油以利转动螺丝.要注意模具定位环与注塑机孔径是否相符及射嘴之孔径和弧度是否与模具适合.定位环不符则不容易对准中心射出孔,射嘴孔径或弧度不合则有可能会发生漏料等问题.固定模具後开启机械,做好模厚设定,不同型式之成型机有不同模厚设定之程序,请注意学习或参考详细之英文操作手册.并作好记录.第六节:成型条件设定模厚设定完成後首先设定开模’关模速度,因为不同之模具需不同之开模行程及速度压力等.按下萤幕选择页面之关模或开模页面,先设定模具最大开模行程A,然後设定第一第二第三段速度及速度变换点,设定低压保护压力及位置等,并设定适当之锁模力,把开关模相关值都设定完,并试试手动开关模,观查模具开合是否顺利等.然後设定适当之顶出行程及力量’速度等,从小距离及小压力’慢速度开始设定,找到适合的速度’压力及距离位置等,开始设定时要小心,或是要注意模具必需在锁紧状态,以免太大力把模子顶坏.第七节: 进料距离’速度’背压设定按下进料页面,设定较小之进料位置,可作为试射之参考.在射出後观查塑料不足程度再加大进料距离.可给个进料前及进料後松退位置以利进料.进料前松退有可能会进入空气造成PMMA等成品不良,未设定进料松退距离则可能会造成流料情况.进料速度不需太高,在进料时间足够情况下大约设定在60%即可,在最高速下可设定100%以减少进料时间,若在生产时100%转速之进料时间仍大於冷却时间,即表示此情况最好采用电动进料马达.以缩短成型周期.背压有五段,最大值是40Bar,一般设定在5Bar左右即可.每段可相同或是渐昇,最後一段昇高以利进料密度均匀. 成型时观查保压完了後之螺杆残量(缓冲距离),残量太大则减少进料距离,若残量距离太小则增加进料距离..按下合模选择钮出现此页SFx是模具现在位置实际值.A是模具开模行程位置.V1是合模第一段速度,位置从A到W3,此速度要慢些以免震动机械但行程要短.此例V1设定15%,W3 设定在230mm位置,所以看实例此速从247.8mm到230mm.V2是合模第二段速度,位置从W3到W1,此例中设定速度22%,位置则自230mm到40mm.V3是合模第三段速度,位置从40mm到G2 位置.G1是合模低压保护开始位置,此时压力下降至P2值,P2是低压保护之压力设定值.此例保护位置开始於30mm 并以压力40%到关模终止.模具位置到达G2位置时,,即保护完了!并且锁模高压将上昇到设定值.模具保护时间之实际值若大於所设定之ZF,则模具不关模并打开模子及警报.若开模时遇到保护问题则开模,但是依照多重关闭次数最大值再次关模,若没问题则继续生产否则发出警报.设定0表示不用此能.按下合模後再按下F2设定值曲线图可在曲线图画面设定合模条件A是开模最大行程距离W3是第一段速度到第二段速度切换位置W1是第二段速度到第三段速度切换位置G1是低压保护开始位置,G1到G2是低压保护的行程距离G2是低压保护完了位置,从此位置开始锁模高压出力.相对应於位置设定各个速度及压力例中:第一段关模速度是15%第二段关模速度是22%第三段关模速度是13%低压保护设定40%按下关模及选择锁紧力出现此页SK是设定希望之锁模力量例:700 kN10 kN 约等於1吨锁模力此例70吨锁模力实际锁模力SKx将大於SK值A是所要之开模行程距离例:245mmSFx是实际模具现在位置: 例:247.8mm此时模具已开,需到达最大设定位置A以上按下开模选择钮出现此画面.第一段开模速度V6要慢!此速度从G2点到W4位置,所以W4位置不可太大,范围在50mm以内,考虑模具打开时不要拉伤产品即可.范例中以第一段V6速度15%,行程自0mm到30mm.第二段速度V7要快些,行程也给多些.此段速度控制W4至W2位置之间距速度.范例是自30mm至200mm.第三段速度V8控制W2至A点之速度,范例中是自200mm到245mm.速度设定於20%.A位置是开模终点.也就是开模到达之意.或是说模子是从0mm开到245mm位置,实际开模行程必需大於A值. SFx是模具现在位置显示值.Zux是周期时间进行实际值,Zus是上一模之周期时间值,此例中我们设定最大值60秒,表示正常情况下周期时间不会超过60秒,周期时间监察设定在”是”状态,则机械将侦查周期时间不可超过最大值,若超过则警报.按下开模再按下F3显示此页气动阀硬体是属於外加设备请检查此机是否有装? 气动阀动作可选择七种动作方式,用数字表示此例 4 是表示选择第4个功能项.开始吹气时模具位置在那里?吹气延迟:虽然开始但是要再延迟吗?吹气时间:要吹气多久呢?SFx:显示现在模具实际位置在多少mm按下开模选择F4安全门显示此页此页是监控安全门开关的指示灯打开安全门显示此画面E1 E2 E7 是前门下方左右两边的开关开关有时序开关之时序有时差限制,必需在一秒内完成相关动作!就是此开关动了另一开关就必须也动作否则就会警报,开关是连动的情况!若开关不顺利需拆下门来调整开关的角度!DO 25是控制油压总开关!按下开模选择F4後显示此页把安全门全关上时显示此页此为正常显示页所有开关跳到上面DO25阀灯亮起来注射画面之第一页注射画面之F1显示此页显示此机最高射出速度可达每秒300mm.共十段的射出速度设定值如下第一段至第五段射出速度第六段至第十段射出速度射出速度是以每秒多少mm为单位P6是射出之允许压力值限制於此范围内P6是以此为射出压力目标值PHx是目前油压出力值SSx是螺杆之现在位置ZSx实际射出所用时间值若实际射出时间超过最小值或是最大值则机械警报ZIN是射出前螺杆转动进料时间!通常设定为?0V23是射出前螺杆转动之速度.通常设定为0若需射出较此机理论容积更大的量时才用上述两个设定! 射出前会执行ZIN时间後才射出开始!按下注射选择F3设定值曲线图显示此页此机之最大可设定射出速度以每秒mm表示共十段的射出速度设定值如下第一段至第五段射出速度第六段至第十段射出速度射出速度是以每秒多少mm为单位PHx是目前油压出力值SSx是螺杆之现在位置C3u是射出切换至保压知螺杆位置值C1是螺杆进料行程但未加上进料後松退位置此处压力125BAR是P6设定值按下注射选择F5注射绝对值曲线图显示此页此机之最大可设定射出速度以每秒ccm表示共十段的射出速度设定值如下射出速度是以每秒多少ccm为单位射出压力是以绝对值表示非以pump压力表示切换模式选择控制画面成型时自射出切换至保压有四种选择行程控制VP切换点,若设定为”是”则射出时螺杆到达C3时即转换成保压之意.C3u是实际上VP切换位置.SSx 是螺杆现在位置值.C3a是螺杆射出位置必需小於此点时才能做切换,以防止在此点前产生之高压力干扰VP切换点!时间控制切换VP点若设为”是”,则射出时间到达Z1此值时即作切换为保压,ZSx是实际射出时间值.液压压力控制切换VP点若设定为”是”,则射出压力达到PH值时做VP切换!实际切换时之压力值显示在Phu值.最大值是PVs值,射出螺杆位置必需小於C3b时才能作切换,PVs模腔压力控制VP切换点,若设为”是”, 则必需模腔压力达到PF点後才能切换至保压.实际模腔压力值是Pfu,最大值是PFs,现在值是PFx.此功能需要外加装上模腔内压力感测器属非标准配备.保压画面之第一页射出完後切换到保压保压有十段设定,每段以BAR为单位,第一行是从第一到五段之设定第二行是从第六段到十段之设定Z2是保压时间设定,原则上平均分配到十段保压压力Z4是冷却时间设定值,左边是实际进行值CPx是保压完了螺杆位置值设定最小值及最大值:这是警报范围设定.缓冲监控若设定”是”, 则当CPx值超出最小值或最大值时都将记不良品一次(请看顶出页之F2),若超出设定次数会警报.C1是塑化进料量位置设定值SSx是螺杆现在位置PHx是油压现在实际值PNs是保压之最大油压值此处输入螺杆直径SDM=多少mm供机械计算绝对值按下保压及选择F2设定值曲线图在此页面可以设定保压条件次页保压时间已分段设定保压之速度是以射出之最後一段为基准保压速度不能单独变更保压压力可以单独变更保压压力之第一段起,应以射出切换至保压时之压力为基准,并慢慢以十段渐降至30BAR 因为多段所以没有全部显示在同一画面需要向左右选择要调整的段数.按下保压後选择F3 显示此页射出完後切换到保压此处是以绝对值表示保压有十段设定,每段以BAR为单位,第一行是从一到五段设定第二行是从六段到十段设定Z2是保压时间设定,原则上平均分配到十段保压压力Z4是冷却时间设定值,左边是实际进行值CPx是保压完了螺杆位置值以ccm表示设定最小值及最大值缓冲监控设定”是”则当CPx值超出最小值或最大值时都将记不良品一次(要看顶出页之F2) HV是螺杆行程以容积计算表示C1的量HVx是螺杆现在位置换算成ccm之值PNs是保压之最大油压值此处输入螺杆直径SDM=多少mm供机械计算绝对值射台控制画面若想要在保压完了後射座後退,则必需选择设定在 1 “是”状态.射台前端是否已到模具接触位置J会亮起来,P5射台射嘴接触模具之压力设定,太小则可能射嘴漏料Z5a是锁模高压完成後出力P5接触压的时间值,不可设定为0秒.P5b是保压完了後射座保持压力值,不需太大.若保压完了要射座後退则需设定K值,则射座会後退到K值处,Z6是延迟射座後退的开始执行时间.CONT.---这行意思是:射座接触压力与锁模力高压上昇同步进行.射台前进与合模同步:若射座有後退动作则是否要与合模同步进行呢?当关模到达DS位置时开始做射座前进动作.E9Q及E9是射座安全门开关信号动作显示.塑化之画面第一页C1是进料时之螺杆停止转动位置(还会松退)此塑化速度以螺杆每分钟最大转速百分比设定此例是80%DZm 标示此机之最大螺杆转速例:400 rpmDZx是现在螺杆之转动速度值PSS是出现背压之最大值,PSx背压实际值设定塑化时之五段背压,背压最大值是40barZDx是塑化之实际值再给个最小值最大值范围,并选择是否要监控警报? 范例:是上一次之循环周期显示在ZDs 秒数Z3是塑化进料前是否给个延迟时间?C4是塑化前螺杆松退距离,螺杆不转动直退C4包含在C1行程距离内C2是塑化进料螺杆转动停止後再直退距离C2*等於C1+C2之值是螺杆应停止位置:80mm实际螺杆停止位置SSx大於C2* 例:81.2mmV24是螺杆松退时之速度按下塑化後选F2设定值曲线图C1是进料时之螺杆停止转动位置(还会松退)此塑化速度以螺杆每分钟最大转速百分比设定此例是80%DZm 标示此机之最大螺杆转速例:400 rpmDZx是现在螺杆之转动速度值PSS是出现背压之最大值,PSx背压实际值设定塑化时之五段背压,背压最大值是40barZDx是塑化之实际值再给个最小值最大值范围,并选择是否要监控警报? 范例:是上一次之循环周期显示在ZDs 秒数Z3是塑化进料前是否给个延迟时间?C4是塑化前螺杆松退距离,螺杆不转动直退C4包含在C1行程距离内C2是塑化进料螺杆转动停止後再直退距离C2*等於C1+C2之值是螺杆应停止位置:80mm实际螺杆停止位置SSx大於C2* 例:81.2mmV24是螺杆松退时之速度按下塑化选择F2设定值曲线图显示此页C1是进料时之螺杆停止转动位置(还会松退)此塑化速度以螺杆每分钟最大转速百分比设定此例是80%DZm 标示此机之最大螺杆转速例:400 rpmDZx是现在螺杆之转动速度值PSS是出现背压之最大值,PSx背压实际值设定塑化时之五段背压,背压最大值是40barZDx是塑化之实际值再给个最小值最大值范围,并选择是否要监控警报? 范例:是上一次之循环周期显示在ZDs 秒数Z3是塑化进料前是否给个延迟时间?C4是塑化前螺杆松退距离,螺杆不转动直退C4包含在C1行程距离内部份看不到要按下向右钮C2是塑化进料螺杆转动停止後再直退距离C2*等於C1+C2之值是螺杆应停止位置:80mm实际螺杆停止位置SSx大於C2* 例:81.2mmV24是螺杆松退时之速度按下塑化选择F4设定值曲线图显示此页此处以绝对值表示塑化量塑化位置是以ccm表示螺杆转速以多少rpm/每分钟表示设定塑化时之五段背压,以绝对值bar显示C4是塑化前螺杆松退距离,螺杆不转动直退C4包含在C1行程距离内部份看不到要按下向右钮C2是塑化进料螺杆转动停止後再直退距离螺赶实际位置以ccm表示顶出控制画面SFx是模具位置实际值显示,A是开模之位置射定值,A1是顶出针可动作位置值,Sax是顶针现在位置值,L1是顶出之最前面行程位置L是顶针在後面之准备位置,L2是顶针若有做震动状况时之中间位置V25是顶针前进第一段速度值,V27是顶针前进第二段速度值P25是顶针前进第一段压力值,P27是顶针前进第二段压力值V28是顶针後退第一段速度值P28是顶针後退第一段压力值L3是前进速度切换位置,L4是後退速度切换位置V26 P26是後退第二段速度压力值ZAV是顶针前进之延迟时间ZA是顶针後退之延迟时间AZ是顶针动做之次数设定循环结束位置:顶出完了後顶针位置,也就是下一循环开始时允许顶针的位置是在那?脱模时间:是间隔下一周期开始之延迟时间!周期完了後执行此Z5时间後才开始下一周期. 顶出监控:是否作落下确认?电热控制第一个画面区域第一段自左边之射嘴开始算起,状态之T是实际值在允许之上下限范围内之意状态H是现在正在加热状态之意状态K是现在处於冷却状态,若没有加装风扇或冷却水等此状态没作用状态F是表示故障状态.机械判定可能硬体故障.监查开关可控制此段故障是否可忽略.最大正向温度波动范围是允许实际值在设定值加上此值之范围内,否则警报.最大负向温度波动范围是允许实际值在设定值减掉此值之范围内,否则警报.温度下限:此值是当机械有问题时将自动降温至此温度点,亦可以人工设定在”开”状态!以保持料管温度於此油温实际值大於设定值时将打开冷去水阀,油温有上下限,低於下限则自动加温并不能生产,油温高於设定之最高温度则停机警报.最高油温及最低油温建议在50度C及25度.SDM是螺杆直径数字供机械计算绝对值时使用!。
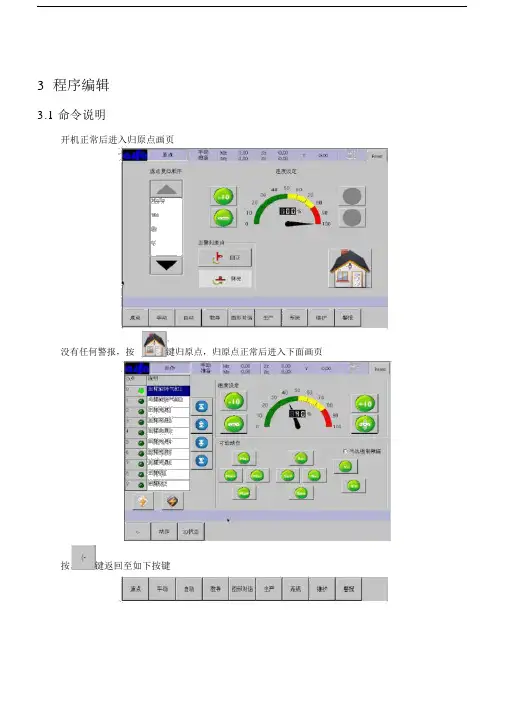
3程序编辑3.1 命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“ MX ”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般 I/O按键进入侧姿回正等选择。
5)成型 I/O按键进入成型相关条件设定。
6)治具 I/O按键进入治具相关功能设定。
7)周边 I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10)停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为 0~99 共 100 个。
12)堆叠按键进入装箱取物功能设定。
编号为 0~3 共 4 个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
2.操作说明开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home 键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“馬達強制激磁”,按键,反方向操作轴寸动。
寸动时轴运行速度快慢调整。
光标移到要输出的选项,点击输出。
4.维护篇4.1系统相关参数设定按键返回到下面操作键。
4.1.1操作设定按“系统”键进入下画页。
4.1.2禁区设定按“禁区”键进入下画页。
在此画面设定各轴禁区位置。
4.1.3极限设定按“极限”键进入下画页。
在此画面设定各轴最大最小值。
4.1.4出厂设定按“出厂”键进入下画页。
在此面可以看机械出厂前相关信息。
4.1.5语言切换按“语系”键进入文字切换。
4.1.6系统参数备份按“备份”键进入系统参数备份。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
如下图所示:若U盘内有改好的Ladder,可以由USB汇入。
更改PLC后由此传到控制器。
4.1.7系统升级按键返回,再按“>>”键切换下一功能键,点击“升级”键。
在主机USB接口插入U盘,盘内有要升级的程序,点“确定”开始程序升级。
4.2系统维护在操作切换栏按“维护”键进入下面画页。
在此画面可以观看系统变量内的值,程序执行时是否按要求变化。
发生故障时查找原因。
按“I/OMap”键进入下面画页。
在DIMap,DOMap内offset位看I/O点实际对应硬件接线位置。
按键返回,再按“切换用户”键进入下面画页。
在此画页内更改操作权限。
10~19为机械厂使用权限。
20~29为编辑权限。
99为一般用户权限。
改变使用者等级输入密码"****"点击OK键后出现如下画页在此等级下,进入编辑,修改。
按键返回,再按“操作权限”键进入下面画页。
此画页设定不同画页采用不同使用权限。
按键返回,再按“变更密码”键进入下面画页。
用户根据要求设定新密码。
按键返回,再按“阶梯图”键进入下面画页。
通过此画页看程序运行,以及PLC输入输出等状态。
4.3教好程序备份在教导画页内按“档案”键进入下面画页。
在此画页按“汇入汇出”键进入下面画面。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
2003年第二版1/49第一章:操作面板操作面板組成分為三部份,第一部份是螢幕顯示畫面,由10.4”之LC或彩色TFT組成,第二部份是按鈕,有ESC 及F1~F8 及次頁等選擇按鈕,有數字輸入按鈕,有亮點控制方向按鈕,及手動控制按鈕,功能選擇按鈕等.第三部份是旋轉式控制開關如電源開關及馬達開關,電熱開關等.第一節:亮點控制鈕此上下左右四個箭頭按鈕可以控制顯示屏的亮點上下移動,移動亮點到我們希望輸入那行數值的位置後,才有可能輸入新的數值,此控制尚有兩個頁面下翻或上翻按鈕可以按選下頁畫面或上一頁畫面.第二節:數字輸入按鈕有數字0~9及小數點,正值,負值,上昇,下降等按紐,按下此數字後可在顯示屏上相對應看到我們輸入的值.第三節:其它功能按鈕ENTER 輸入按鈕,當按入數字後選按此ENTER則數值輸入電腦。
我們可以看到亮點位置之值已被新數值代替,如此則完成數值輸入. CLEAR 數字按入後若希望改變則按下此CLEAR鈕,會清除我們所按入的數字,便可以重新按入新數值。
向下雙箭頭:當按下ENTER後同樣數字值可以被輸入於下一個值中,按下此雙箭頭便是將上一次ENTER之同值輸入新亮點位置。
帶有叉叉之三角驚嘆號錯誤顯示標誌,若有錯誤警報,則每按下此紐一次,便清除最上面一個錯誤狀況,但是若尚位解除此錯誤,則此錯誤警報便會再出現於最下行的警報位置。
2003年第二版2/49第四節:輸入控制鑰匙此鑰匙有OFF位置:不能變更顯示屏上所有之值,不允許輸入新值,此位置祇能查看電腦之條件設定值.ON 位置:若鑰匙轉於此位置則允許輸入新值到電腦中,可以改變成型條件或是其它參數.但是不能列印參數於印表機上.PR 位置:鑰匙轉於此位置除了可以輸入數值改變設定外,還可以將利用印表機等作條件列印.要用印表機唯有將鑰匙位置轉至此.第五節:ESC及F1~F8按鈕ESC按鈕可跳離目前之狀況,或中斷現在之功能, F1 ~ F8 按鈕則相對應於顯示屏之說明功能。
精心整理2.操作说明2.1开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“马达强制激磁”,按键,反方向操作轴寸动。
注塑机机械手说明书3、编程3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键3-1 File:CNC4-3C3、编程按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大3-2 File:CNC4-3C3、编程编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
3-3 File:CNC4-3C3、编程2) 速度按键进入速度设定。
3) 计时按键进入延时功能设定。
3-4 File:CNC4-3C3、编程4)一般I/O按键进入侧姿回正等选择。
5) 成型I/O按键进入成型相关条件设定。
3-5 File:CNC4-3C3、编程6) 治具I/O按键进入治具相关功能设定。
7) 周边I/O按键进入周边相关功能设定。
3-6 File:CNC4-3C3、编程8) 回圈按键进入循环功能设定。
9) 跳跃按键进入跳转功能设定。
3-7 File:CNC4-3C3、编程10) 停止按键进入程序完成设定。
11) 宏按键进入调用已经编好的子程序。
编号为0~99共100个。
3-8 File:CNC4-3C3、编程12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3-9 File:CNC4-3C3、编程3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面3-10 File:CNC4-3C3、编程点击档案按钮进入如下画面按钮,切换到如下画面在此页点击3-11 File:CNC4-3C3、编程点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。